MOOS-ivp使用(一)——水下機器人系統的入門與使用
MOOS-ivp(Marine Operational Oceanographic System for Intelligent Vehicle Planning)是專為水下機器人(如AUV)設計的開源框架。類似于ROS,MOOS-ivp采用UDP通信機制,通過發布-訂閱模型實現各個節點之間的通信。但與ROS不同,MOOS-ivp更加輕量,且易于移植到嵌入式設備上,非常適合低功耗應用。
本文將介紹如何在Ubuntu環境下安裝、配置MOOS-ivp,并簡要介紹其核心組件和基本使用方式。
1. MOOS-ivp概述
MOOS-ivp是一個模塊化的控制框架,廣泛應用于水下機器人和自主水面艇的控制系統。其工作原理類似于ROS,主要包括兩個關鍵部分:
- MOOSDB:作為核心數據庫,負責管理發布和訂閱的消息;
- 程序節點:通過發布-訂閱機制進行節點間的通信。
MOOS-ivp的設計目標是為水下機器人系統提供一個簡單、靈活且高效的解決方案,使其能夠適應各種硬件平臺。
2. MOOS-ivp的安裝與配置
2.1 moos-ivp官網
https://oceanai.mit.edu/moos-ivp/pmwiki/pmwiki.php?n=Site.Download
2.2 下載MOOS-ivp
下載MOOS-ivp的源代碼:
git clone https://github.com/moos-ivp/moos-ivp.git
2.3 編譯
./build.sh
2.4 將 moos-ivp 的 bin 目錄添加到環境變量
export PATH=$PATH:/path/to/your/moos-ivp/bin
source ~/.bashrc
2.5 運行實例
cd ivp/missions/s1_alpha
pAntler alpha.moos
2.6 結果
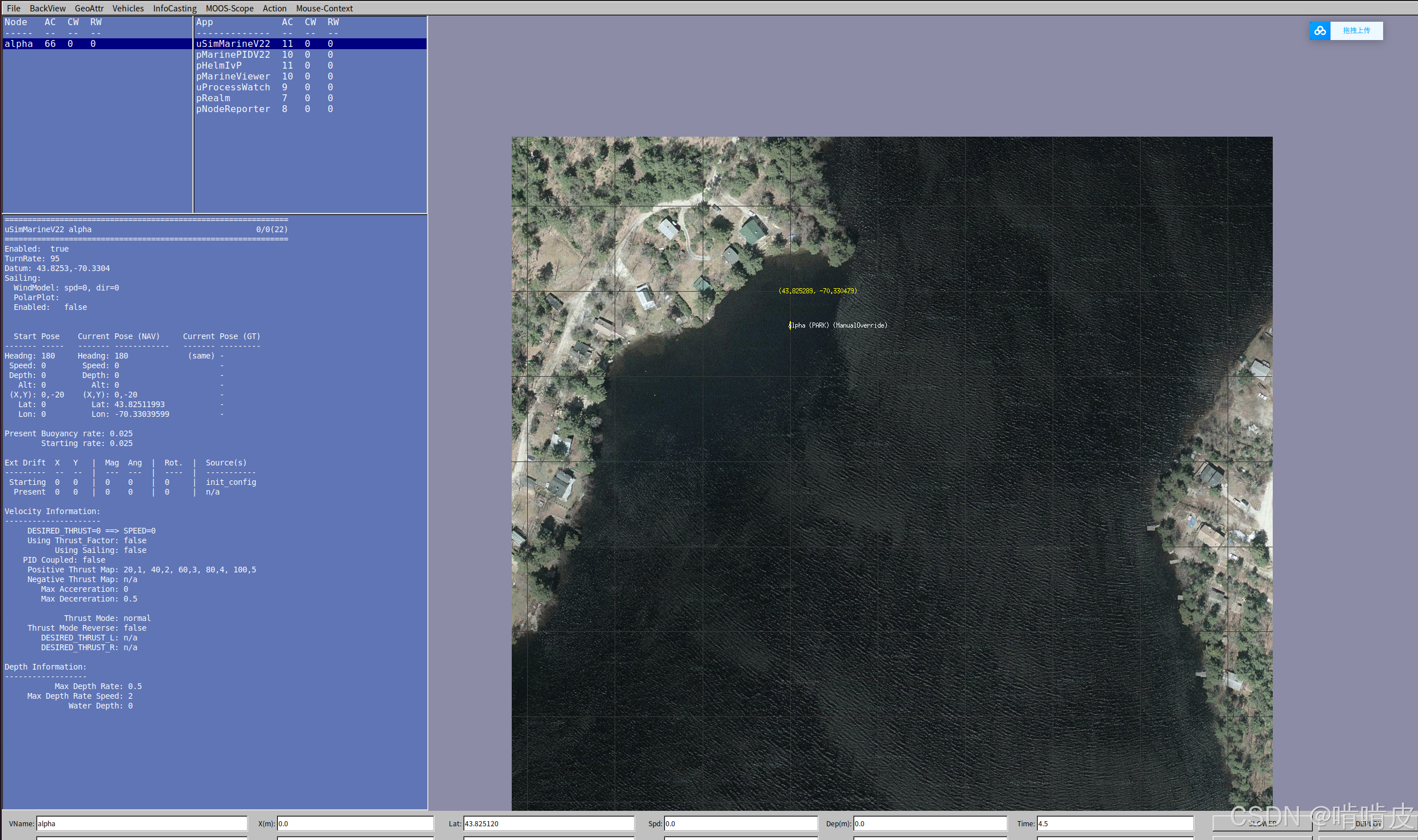
)



![[計算機科學#6]:從鎖存器到內存,計算機存儲的構建與原理](http://pic.xiahunao.cn/[計算機科學#6]:從鎖存器到內存,計算機存儲的構建與原理)


)











