上一篇介紹了利用李雅普諾夫穩定性理論設計模型參考自適應系統,通過在被控對象前面添加一個可調增益,然后利用李雅普諾夫穩定性理論設計增益
的自適應率
,使得被控對象輸出與參考模型輸出一致。本文將介紹在系統結構中引入前饋和反饋的結構,然后利用李雅普諾夫穩定性理論設計MRACS。
1、系統介紹
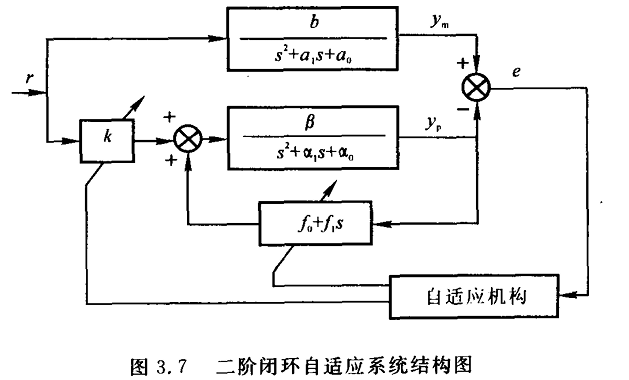
根據被控對象和參考模型的表示形式不同,可以分為利用系統狀態變量設計自適應率和利用控制對象的輸入輸出設計自適應率。狀態變量系統框圖如下(其實,不管被控對象和參考模型是狀態變量形式還是微分方程或者傳遞函數形式,其本質都是一樣的。):
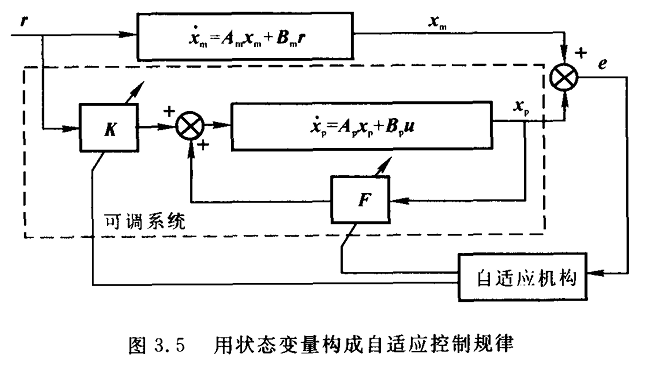
這里以狀態變量形式的自適應系統結構框圖來解釋一下:為什么利用李雅普諾夫穩定性理論設計MRACS,系統結構框圖是在被控對象前面增加一個前饋和反饋。
因為被控對象參數是不能直接調整的,要想改變被控對象的動態特性,只能引入前饋和反饋,其中前饋
影響輸入矩陣
,反饋
影響系統矩陣
(至于為什么,見第二節自適應率設計)。
2、自適應率設計
2.1 狀態方程形式
2.1.1 理論推導
自適應系統結構框圖如上,不管系統引入什么框架,記住核心目標就是,使得廣義誤差?(這里是廣義狀態誤差)為0。
被控對象的輸入:
被控對象狀態方程:
?
從這里可以看出,引入反饋影響系統矩陣
,引入前饋
影響輸入矩陣
(這里的
,
和原來的不一樣)。
廣義狀態誤差:
求導可得,?
在理想情況下,廣義狀態誤差滿足
,只有滿足這樣的線性模型,根據李雅普諾夫穩定性理論才能得到廣義狀態誤差在原點漸近穩定。
設前饋和反饋
的理想值分別為
,使得:
?
可得,
?
帶入誤差導數方程可得,
其中,,稱為可調參數誤差矩陣。
構造李雅普諾夫函數:
這里和利用李雅普諾夫穩定性理論設計模型參考自適應系統選取準則一樣,想要廣義狀態誤差趨于0的同時,還希望反饋矩陣
和前饋矩陣
與它們的理想值越接近越好,即
趨于0。
那么可以構建李雅普諾夫函數:
其中,?為對稱正定矩陣。
求導可得,
將
先計算前兩項,
根據跡的性質,
?可得,
帶入可得,
?要使,令
根據第一個式子可以求得矩陣,再判斷其是否正定;
根據第二個式子可得,
?
根據第三個式子可得,
?
又,可得
?
可得,
?
最后變化規律為
2.1.2 例題
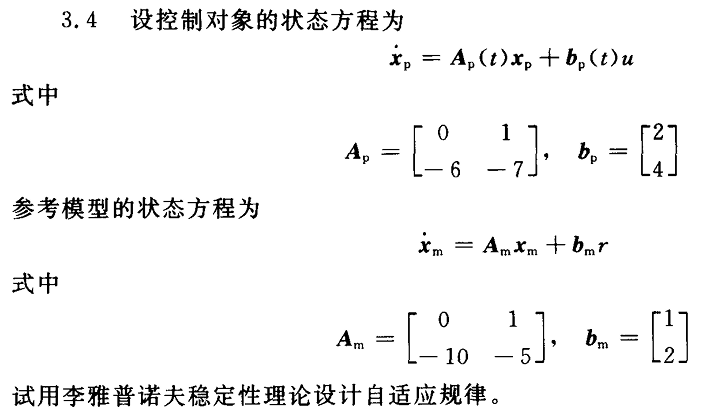
引入前饋增益矩陣和反饋增益矩陣
,可得被控對象的輸入
:
被控對象狀態方程:
?
由等式
?可得,
?設,由
可得,
?
解得,
?
可得正定,系統漸近穩定。?
由題可得,系統輸入維數為1,可設
,
根據公式
?
可得,
?
?
?其中,。
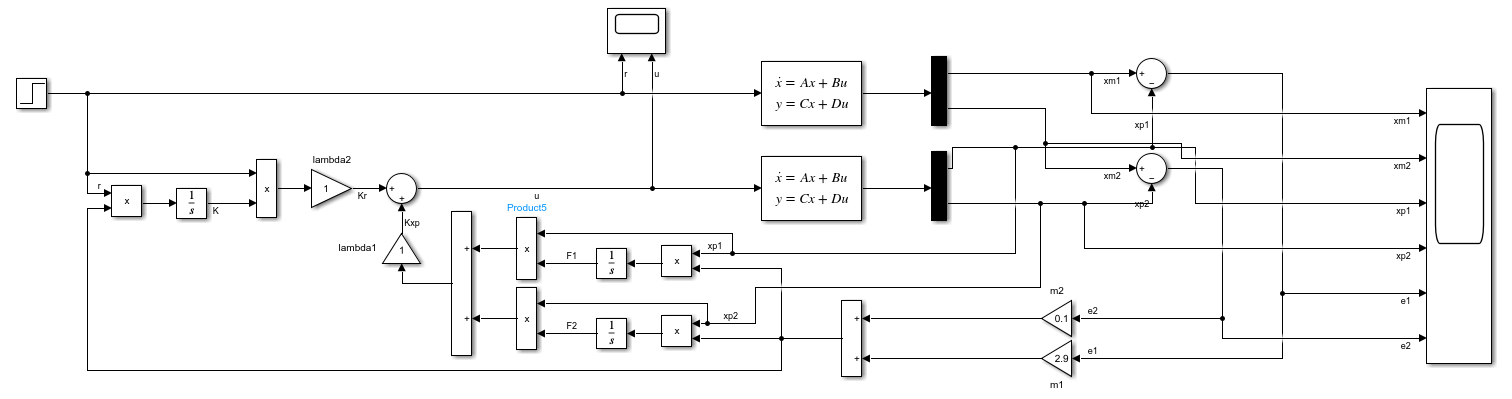
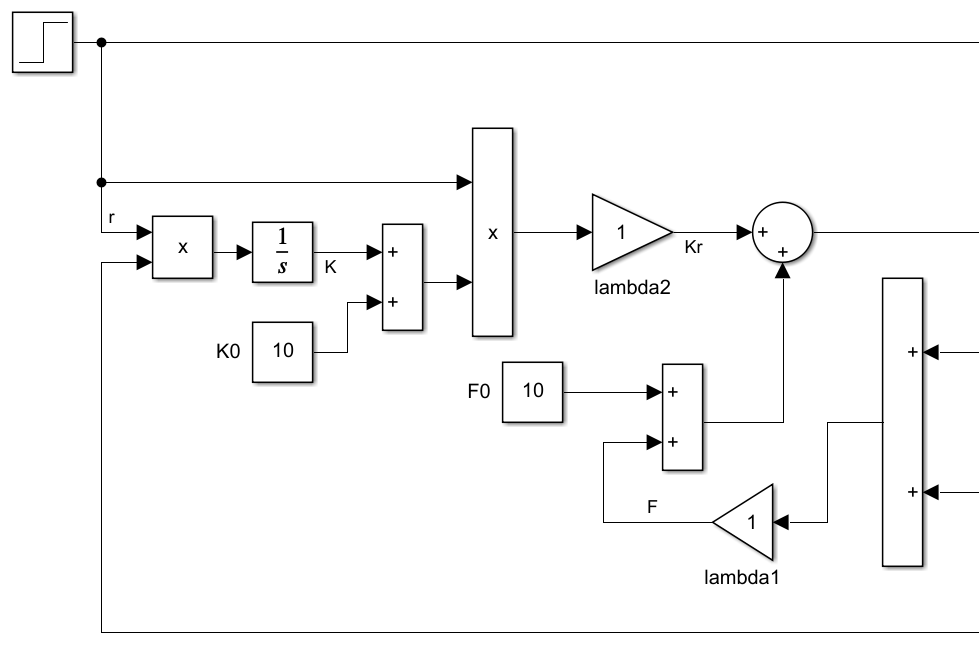
搭建simulink仿真模型為
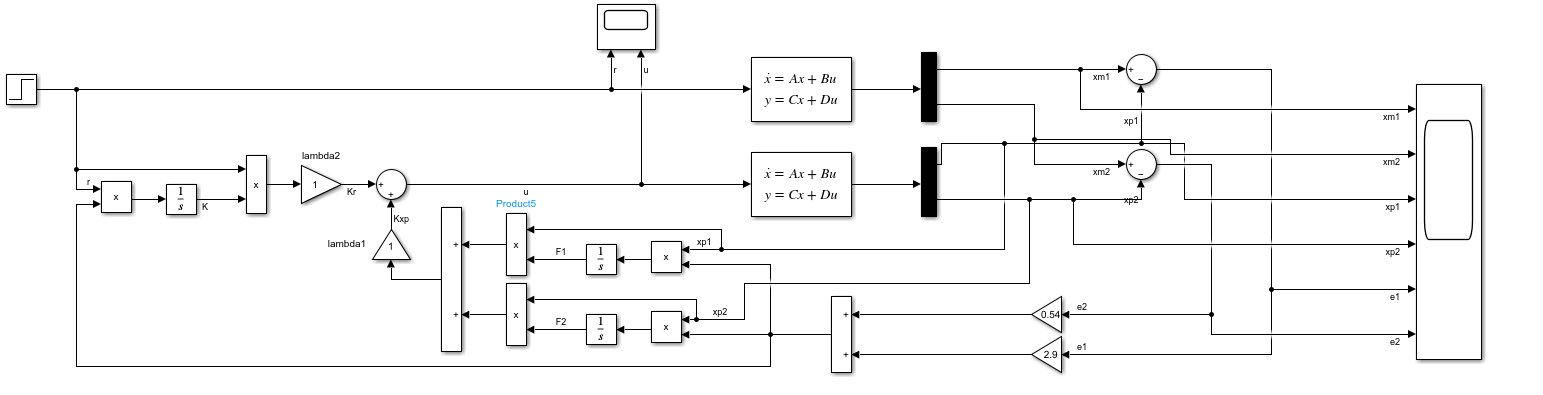
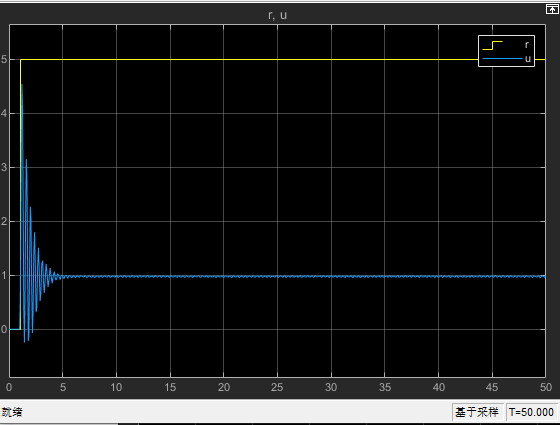
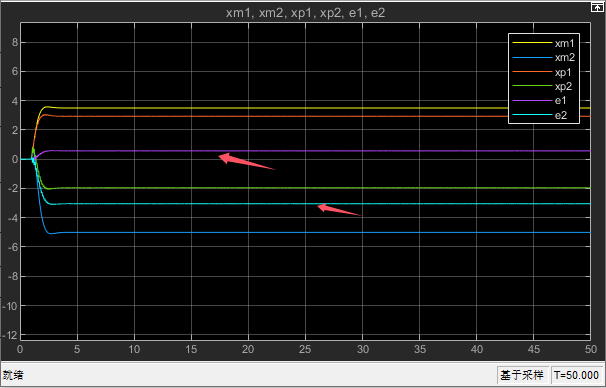
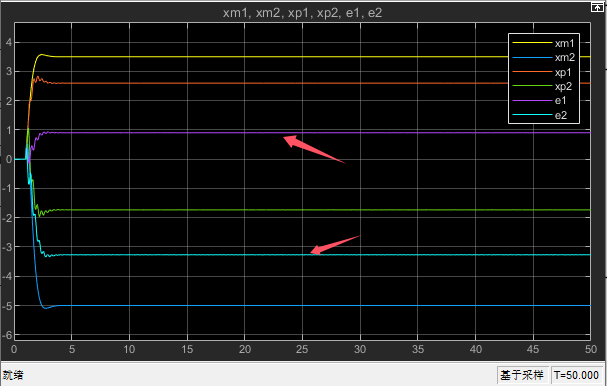
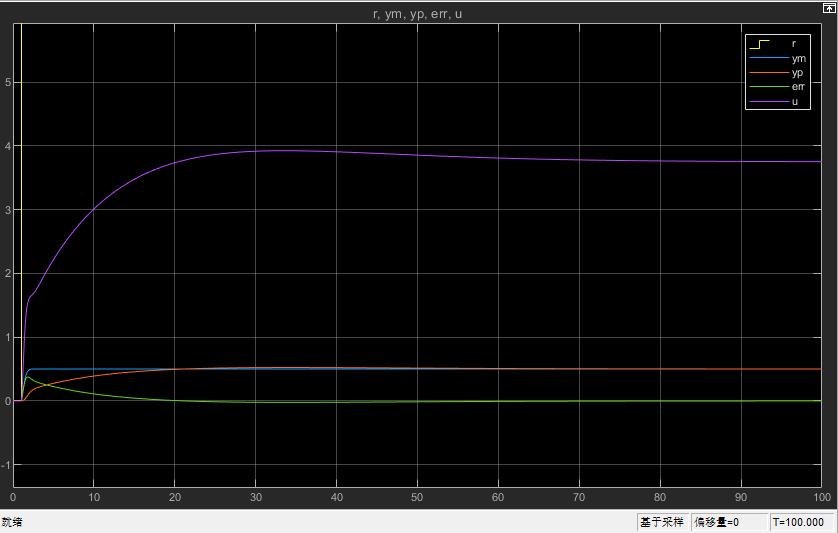
當時,看一下跟蹤效果

?可以看到箭頭所指的兩條誤差曲線并沒有收斂到0。
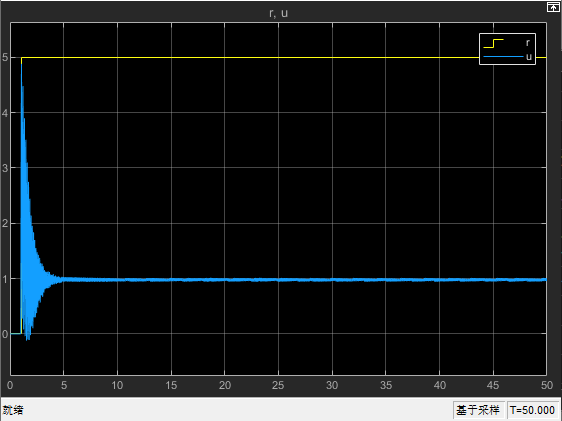
此時,對應的輸入為
下面將探討是哪一個因素影響誤差:?
我們來調整一下
?可以看到誤差最后收斂的數值沒有改變。
可以看到,改變并不能使誤差收斂到0,反而誤差收斂到具體的數值與其無關,這兩個參數只會影響到系統的輸入,即影響系統收斂的速度。
我們從前饋矩陣和反饋矩陣的自適應率來看:
除了兩個參數外(
已經是固定的),還應該注意到矩陣
和初值。
(1)我們前面在求解時,是令,然后求解得到
。
在該題中,即對應到數字2.9和0.54
這里不再重新取的值,求
,然后重新計算一遍,這里直接更改兩個數字,為了方便起見,令兩個數字分別為
,
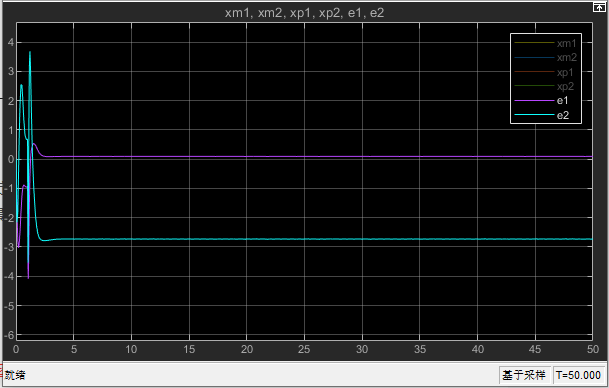
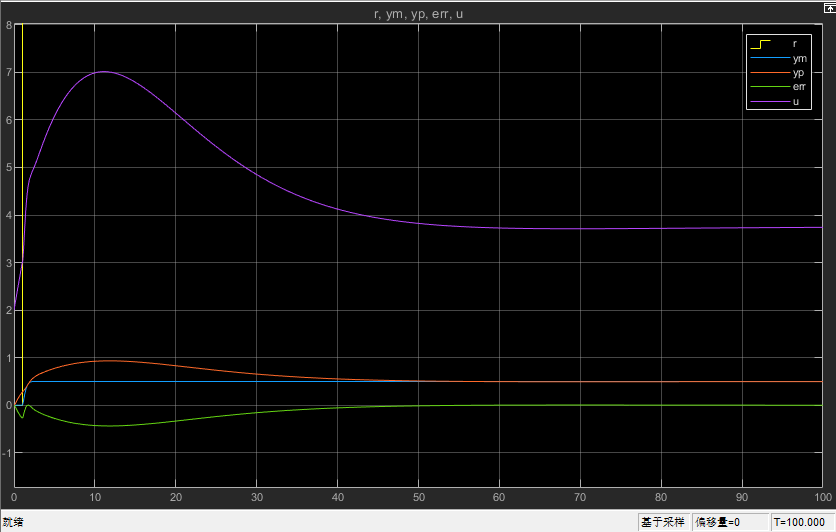
?當時,
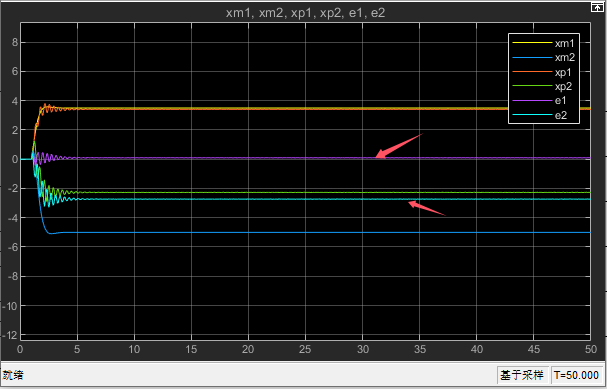
可以看到誤差已經趨近于0,?誤差
也有所減小。
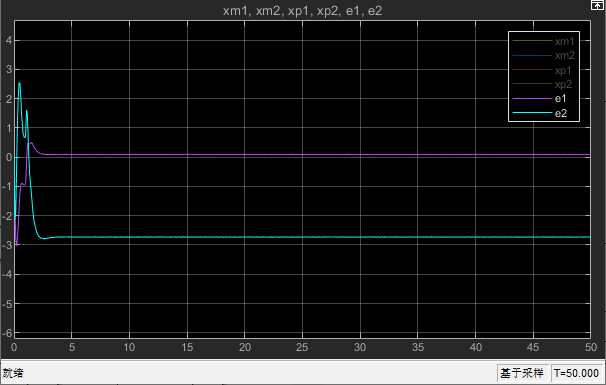
當時,
?可以看到兩個誤差反而增大了。可以得到,合理的選擇矩陣可以使系統誤差穩態值變小。
(2)在前提下,改變初值為10,如圖
?誤差波形為:
改變初值為
?發現,在這個自適應率調節下,初值不影響誤差的收斂值,但會影響到系統最初的輸入
。
總結:從上可以看出,基于李雅普諾夫穩定性設計的MRACS收斂速度與權重有關,但最終誤差收斂到多少與其無關。其次,矩陣
影響到誤差最終的穩態值,要想誤差趨于0,需要合理選擇矩陣
。
2.2 輸入輸出形式
2.2.1 理論推導
這里以微分方程為例(但面對傳遞函數時,可以將傳遞函數轉為微分方程),設被控對象于與參考模型的微分方程分別為
定義廣義誤差
??
可得誤差的微分方程為
?
其中,?
根據誤差的微分方程
令
其中,
?將誤差的微分方程寫為狀態方程為
其中,
?
?選取李雅普諾夫函數,
這里與前面選取準則一樣,想要廣義狀態誤差趨于0的同時,還希望被控對象的參數與參考模型的參數盡量一致,即
趨于0
這里對于李雅普諾夫函數也可以用前一節的李雅普諾夫函數形式,即
?
然后利用前一節推導的結論。
這里采用下列的形式就行推導,李雅普諾夫函數為
其中,為對稱正定矩陣,?
為對角正定矩陣,即
求導可得,?
?
令
可得,
?
?2.2.2 例題
這里以二階系統為例,
參考模型微分方程為:
被控對象微分方程為:
?
其中,輸入為
?
將其帶入被控對象微分方程為
??
令可得,
?
定義廣義誤差
??
?可得,
?令,可得
令
將誤差的微分方程寫為狀態方程為
其中,
?
?選取李雅普諾夫函數,
李雅普諾夫函數為
其中,為對稱正定矩陣,?
為對角正定矩陣,即
?
求導可得,?
令
?
可得自適應率為,
?
由可得
?
由可得
其中,當對象參數緩慢變化時,
可得,
可得自適應規律為
?
?假設參考對象模型為
被控對象模型為
?
引入前饋和反饋
,由對象模型可得,
?
系統矩陣?,由
,可得
帶入自適應規律可得,
?
令,
搭建simulink如下,
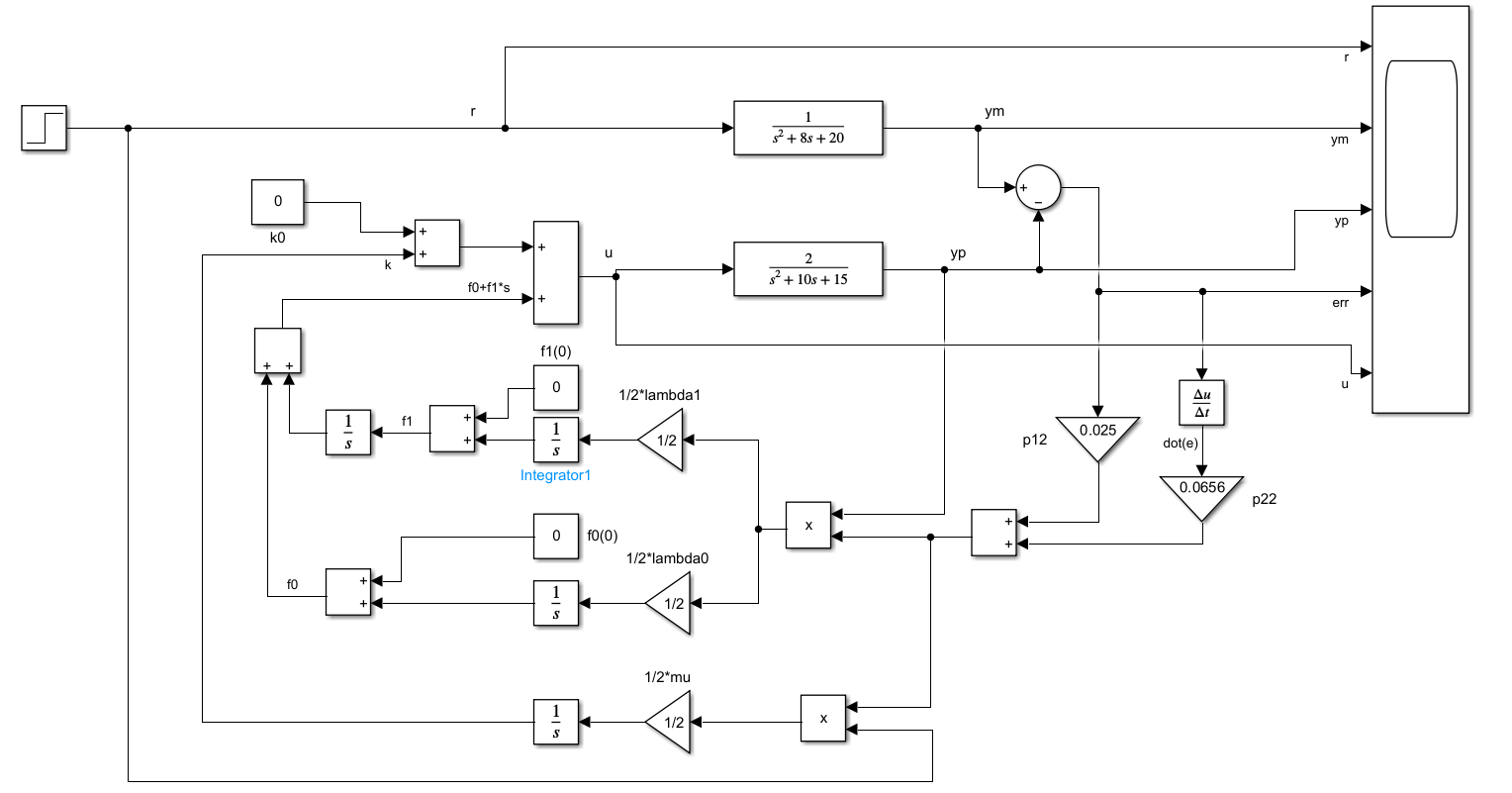
結果如下
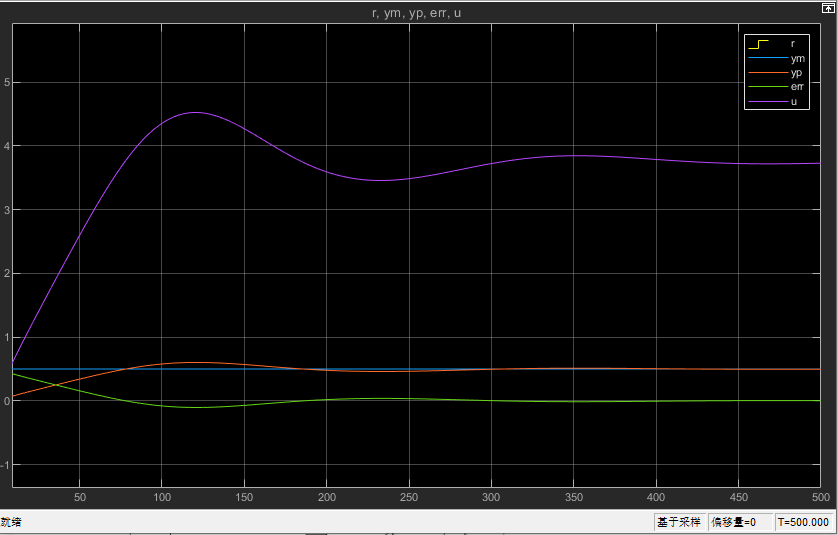 ?可以看到誤差最終趨于0,但是收斂速度太慢。
?可以看到誤差最終趨于0,但是收斂速度太慢。
調整權重,誤差收斂更慢,這是因為其在自適應率中處于分母上,故權重越大,效果越不明顯。
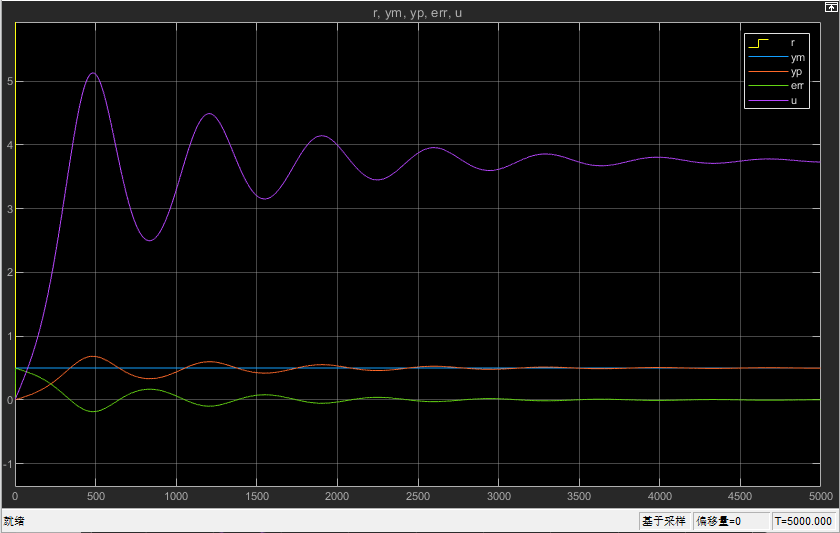
調整權重為?
可以看到系統收斂速度變快。
?在權重為的前提下,調整
可以看到,通過給定一個適當的初值,可以使得系統有更快的響應速度。?
3、總結
通過上面兩個例題,可以看到,選擇不同的李雅普諾夫函數得到的自適應率是不同的,且其中的參數發揮的作用也是不一樣的,有的參數影響收斂速度,有的影響最終誤差的穩態值。
從基于輸入輸出形式的自適應率設計(例題2)可以看到,自適應率與誤差的導數有關,這就導致自適應系統的抗干擾能力降低,為了避免這一缺點,Narendra提出了穩定自適應控制器方案。下一篇將介紹Narendra穩定自適應控制器方案。



里使用iview的注意事項)




)

)
)







