在AI無人系統逐步參與城市空域治理的過程中,系統的“自主性”已不再僅是技術指標,而是直接影響合規性、安全性與社會接受度的倫理邊界議題。AI決策系統是否擁有“強干預能力”?行為觸發責任應歸屬何方?算法可否調優至“自我糾偏”?這些問題的回答將決定AI集群是否能成為可信賴的城市基礎設施。本文提出“空域AI倫理系統框架”,從三大邊界構建出發,探討AI系統在空域中所應承擔的權能邊界、控制邊界與責任邊界,并結合睿途在系統設計中對于“自我限制能力”“倫理可審計性”與“邊界型接口規范”的工程實踐,提出未來空域AI治理的倫理建構路徑。?
一、空域AI的三類邊界系統認知
1.1 權能邊界:AI系統的權限能觸達何處?
- 決策權(任務生成、自調路徑)與行動權(自動飛行、規避、任務執行)
- 睿途定義“邊界權屬圖譜”:以任務等級、城市監管狀態、任務所屬域決定AI權能調度等級

?
1.2 控制邊界:當AI偏離期望行為軌跡,誰來校正?
- 睿途提出“多通道干預系統”:支持監管平臺、飛手、算法自我評估三種校正入口?
- 系統設計中保留“預留控制中斷點”與“飛行行為回滾機制”

?
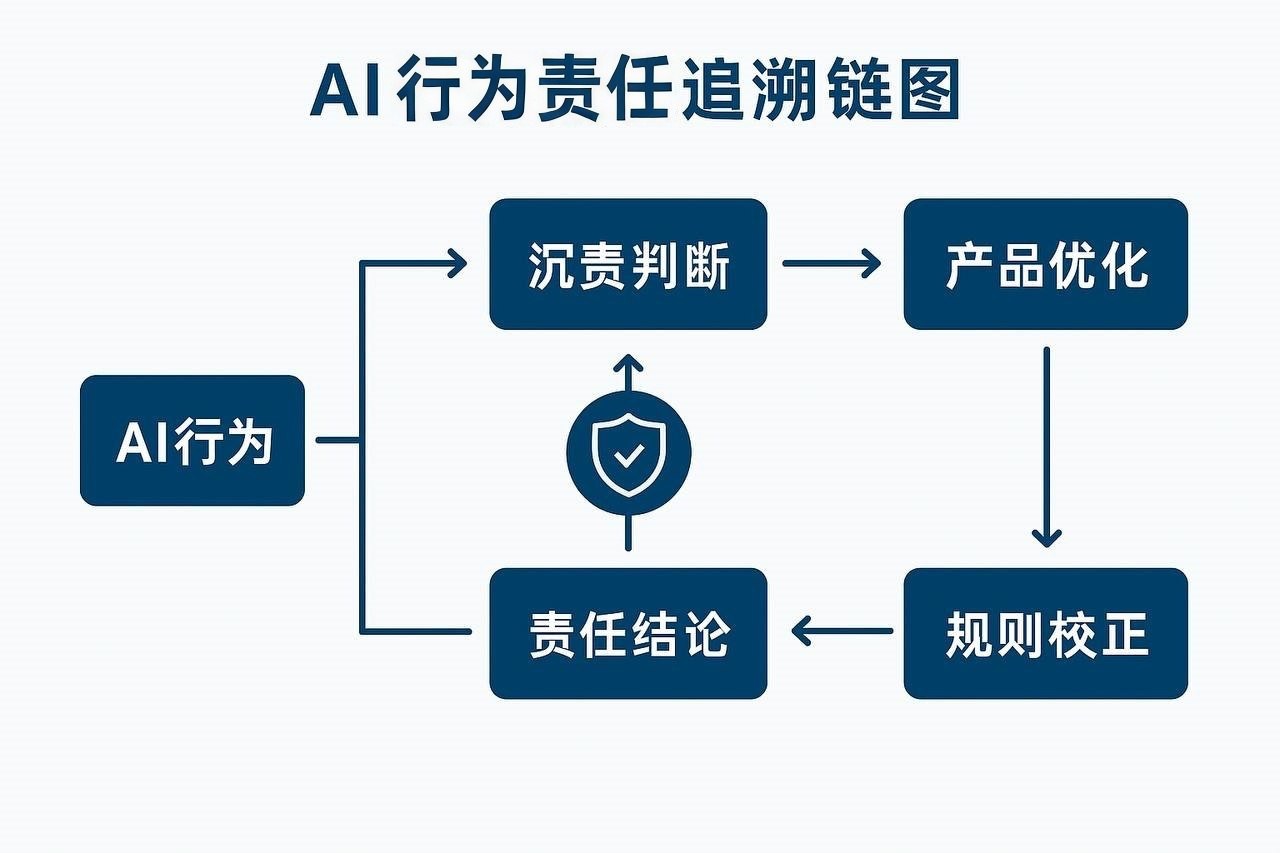
1.3 責任邊界:決策后果由誰承擔?
- 責任可追:任務接入日志、行為軌跡鏈、調度策略HASH可溯源
- 責任可裁:AI-人工行為時序重疊解析,輔助判斷主次責任歸屬
 ?
?
?
二、空域AI倫理系統框架設計
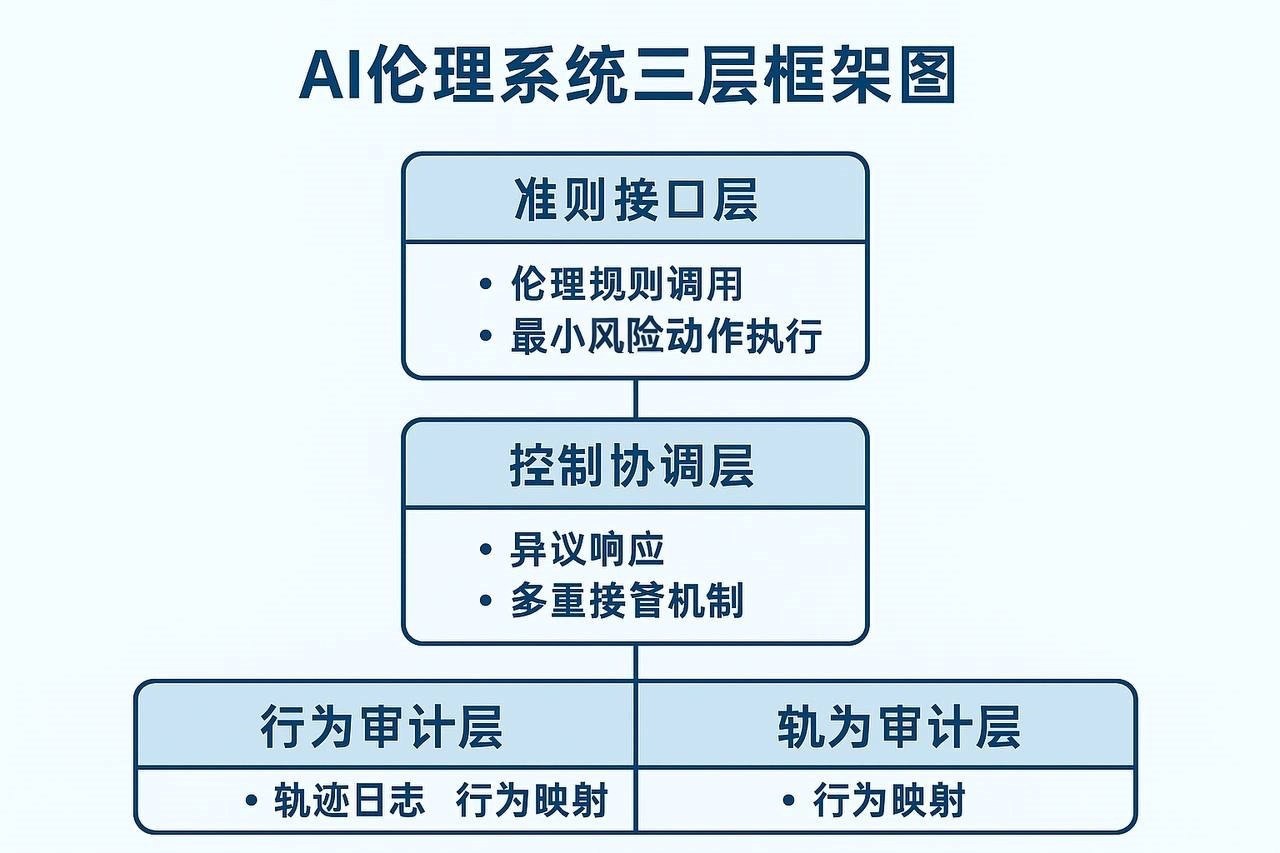
2.1 三層結構:底層行為審計層 + 中層控制協調層 + 頂層倫理準則接口層
- 行為審計:日志 + 策略映射
- 控制協調:異議響應 / 多元接管 / 狀態權重沖突管理
- 準則接口:倫理規則外調用機制,如“最小風險動作”強制執行器
?
2.2 工程落地路徑:
- 飛控端:荷魯斯之眼支持“行為安全模式 + 接管信號插口 + 可回滾棧”
- 平臺端:RT-AI支持“倫理準則圖+行為節點審查器+狀態沖突裁定器”
- 接口層:第三方倫理中介可接入系統形成治理閉環
?
三、睿途邊界型接口實踐案例
3.1 行為圖譜中設置“高風險節點紅線標記”
- 標記如“異動路徑偏離”“多重規避失敗”“信號異常持續”觸發邊界攔截
?
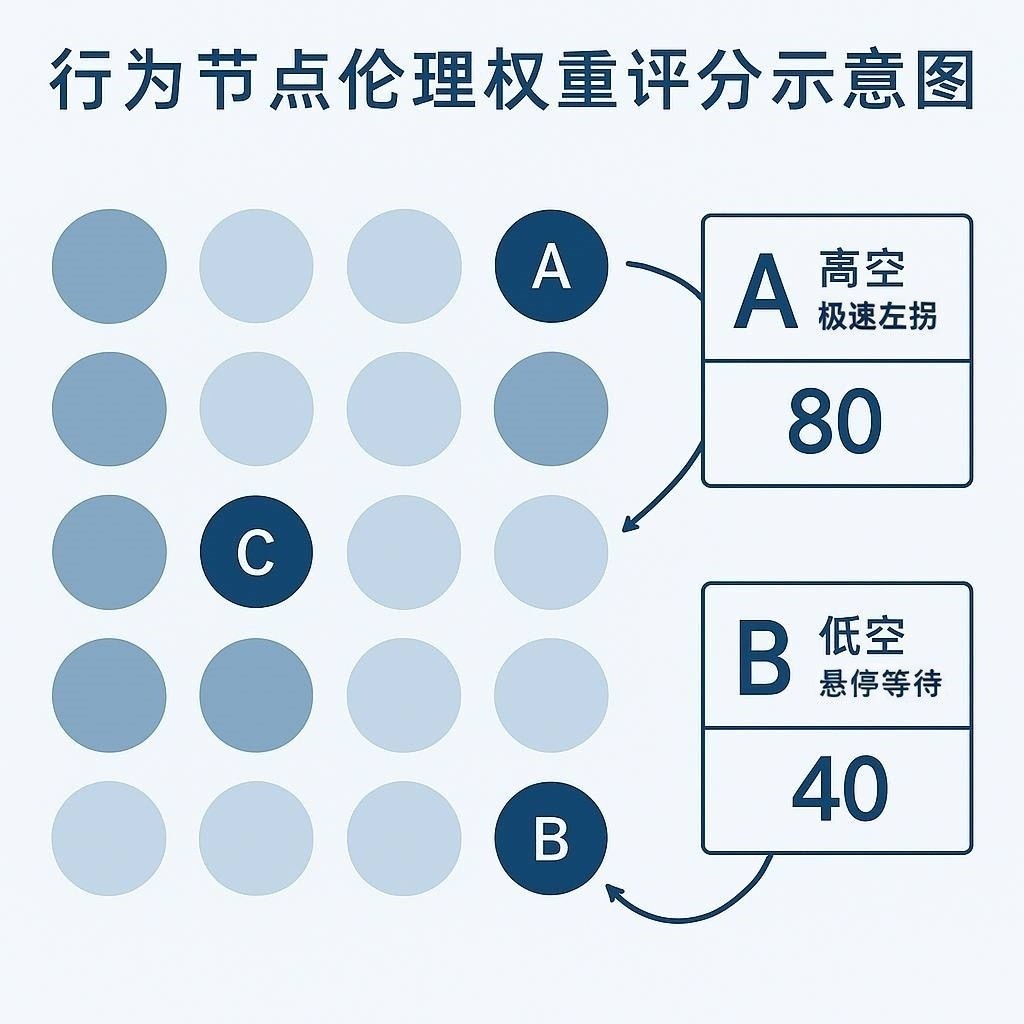
3.2 決策鏈中嵌入“倫理權重評分系統”
- 每一行為節點附帶“倫理權重值”(如對人影響、數據敏感性)
- 系統在路徑規劃中引入“倫理成本函數”,用于優化調度選擇
?
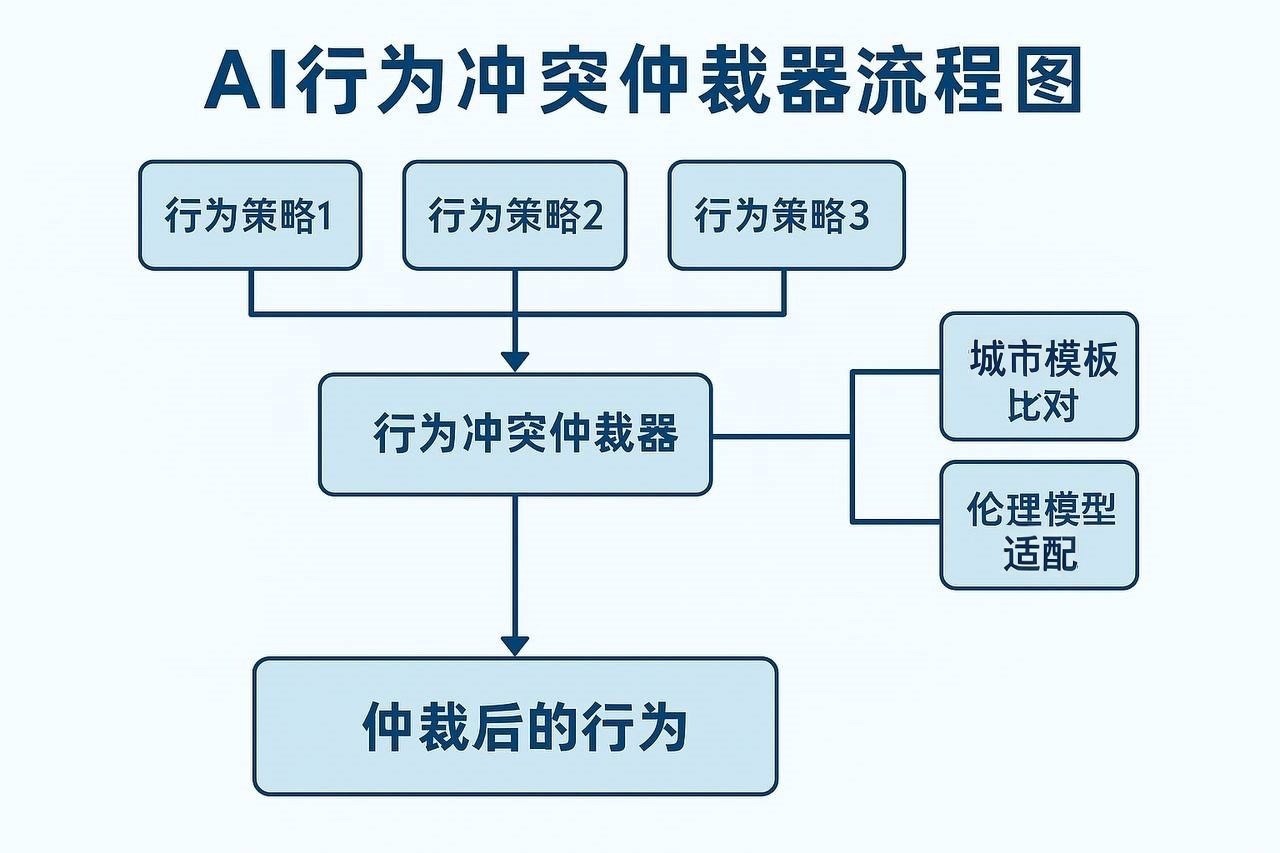
3.3 睿途接入“AI行為沖突仲裁器”試點
- 多飛控算法沖突時由仲裁器判定優先執行權
- 可外部植入城市倫理模型模板,用于跨城市/行業適配
?
結語
AI無人系統若想成為可信賴的空域基礎設施,不只是要“能飛”,更要“飛得對”。空域倫理不是對技術的否定,而是其社會適配能力的升級要求。睿途所推動的“邊界型AI系統架構”試圖在飛行自由與治理約束之間,找到一條“可信可控”的中道路徑,為未來空域治理中的倫理透明化、責任清晰化與決策共識化提供操作范式。
里使用iview的注意事項)




)

)
)










