轉載請注明出處:小鋒學長生活大爆炸[xfxuezhagn.cn]
如果本文幫助到了你,歡迎[點贊、收藏、關注]哦~
目錄
torchrun
一、什么是 torchrun
二、torchrun 的核心參數講解
三、torchrun 會自動設置的環境變量
四、torchrun 啟動過程舉例
機器 A(node_rank=0)上運行
機器 B(node_rank=1)上運行
五、小結表格
PyTorch
一、背景回顧
二、init_process_group
三、腳本中通常的典型寫法
通用啟動腳本
torchrun 與 torch.multiprocessing.spawn 的對比可以看這篇:
【知識】torchrun 與 torch.multiprocessing.spawn 的對比
torchrun
一、什么是 torchrun
torchrun 是 PyTorch 官方推薦的分布式訓練啟動器,它的作用是:
-
啟動 多進程分布式訓練(支持多 GPU,多節點)
-
自動設置每個進程的環境變量
-
協調節點之間建立通信
二、torchrun 的核心參數講解
torchrun \--nnodes=2 \--nproc_per_node=2 \--node_rank=0 \--master_addr=192.168.5.228 \--master_port=29400 \xxx.py
🔹 1. --nnodes(Number of Nodes)
-
表示參與訓練的總機器數。
-
你有幾臺服務器,就寫幾。
-
在分布式訓練中,一個 node 就是一臺物理或虛擬的主機。
-
node的編號從0開始。
? 例子:你用 2 臺機器 → --nnodes=2
🔹 2. --nproc_per_node(Processes Per Node)
-
表示每臺機器上要啟動幾個訓練進程。
-
一個進程對應一個 GPU,因通常設置為你機器上要用到的GPU數。
-
因此,整個分布式環境下,總訓練進程數 =
nnodes * nproc_per_node
? 例子:每臺機器用了?2 張 GPU → --nproc_per_node=2
🔹 3. --node_rank
-
表示當前機器是第幾臺機器。
-
從 0 開始編號,必須每臺機器都不同!
? 例子:
| 機器 IP | node_rank |
|---|---|
| 192.168.5.228 | 0 |
| 192.168.5.229 | 1 |
🔹 4. --master_addr 和 --master_port
-
指定主節點的 IP 和端口,用于 rendezvous(進程對齊)和通信初始化。
-
所有機器必須填寫相同的值!
? 建議:
-
master_addr就是你指定為主節點的那臺機器的 IP -
master_port選一個未被占用的端口,比如 29400
三、torchrun 會自動設置的環境變量
當用 torchrun 啟動后,它會自動給每個進程設置這些環境變量:
| 環境變量 | 含義 |
|---|---|
RANK | 當前進程在全局中的編號(0 ~ world_size - 1) |
LOCAL_RANK | 當前進程在本機中的編號(0 ~ nproc_per_node - 1) |
WORLD_SIZE | 總進程數 = nnodes * nproc_per_node |
你可以在訓練腳本里用 os.environ["RANK"] 來讀取這些信息:
import os
rank = int(os.environ["RANK"])
local_rank = int(os.environ["LOCAL_RANK"])
world_size = int(os.environ["WORLD_SIZE"])
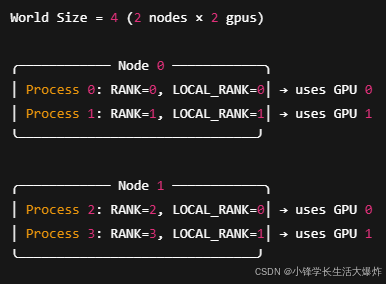
示例分配圖:
四、torchrun 啟動過程舉例
假設:
-
有 2 臺機器
-
每臺機器有 2 個 GPU
-
總共會啟動 4 個進程
機器 A(node_rank=0)上運行
torchrun \--nnodes=2 \--nproc_per_node=2 \--node_rank=0 \--master_addr=192.168.5.228 \--master_port=29400 \xxx.py
機器 B(node_rank=1)上運行
torchrun \--nnodes=2 \--nproc_per_node=2 \--node_rank=1 \--master_addr=192.168.5.228 \--master_port=29400 \xxx.py
torchrun 給每個進程編號的順序(分配 RANK / LOCAL_RANK)
torchrun 按照每臺機器上 node_rank 的順序,并在每臺機器上依次啟動 LOCAL_RANK=0, 1, ..., n-1,最后合成 RANK。
RANK = node_rank × nproc_per_node + local_rankStep 1:按 node_rank 升序處理(node 0 → node 1)
Step 2:每個 node 內部從
local_rank=0開始遞增
本質上:
torchrun是主從結構調度的
所有 node 啟動后,都會和
master_addr通信。master 會統一收集所有 node 的狀態。
每個 node 根據你給的
node_rank自行派生local_rank=0~n-1所有節點通過
RANK = node_rank * nproc_per_node + local_rank得到自己的全局編號。這個機制是 可預測、可控、可復現 的。
📦 node_rank=0 (機器 1)
? ? ├── local_rank=0 → RANK=0
? ? └── local_rank=1 → RANK=1📦 node_rank=1 (機器 2)
? ? ├── local_rank=0 → RANK=2
? ? └── local_rank=1 → RANK=3
最終分配:
| Node Rank | Local Rank | Global Rank (RANK) | 使用 GPU |
|---|---|---|---|
| 0 | 0 | 0 | 0 |
| 0 | 1 | 1 | 1 |
| 1 | 0 | 2 | 0 |
| 1 | 1 | 3 | 1 |
五、小結表格
| 參數 | 作用 | 設置方式 |
|---|---|---|
--nnodes | 總節點數 | 你寫在命令里 |
--nproc_per_node | 每臺節點的進程數(= GPU 數) | 你寫在命令里 |
--node_rank | 當前機器編號(0開始) | 每臺機器唯一 |
--master_addr | 主節點 IP(所有節點需一致) | 你設置 |
--master_port | 主節點端口(所有節點需一致) | 你設置 |
RANK | 當前進程在所有進程中的編號 | torchrun 自動設置 |
LOCAL_RANK | 當前進程在本節點上的編號 | torchrun 自動設置 |
WORLD_SIZE | 總進程數 = nnodes * nproc_per_node | 自動設置 |
PyTorch
PyTorch 的分布式通信是如何通過 init_process_group 與 torchrun 生成的環境變量配合起來工作的。
一、背景回顧
你已經用 torchrun 啟動了多個訓練進程,并且 torchrun 為每個進程自動設置了這些環境變量:
| 變量名 | 含義 |
|---|---|
RANK | 當前進程的全局編號(從 0 開始) |
LOCAL_RANK | 本機上的編號(一般等于 GPU ID) |
WORLD_SIZE | 總進程數 |
MASTER_ADDR | 主節點的 IP |
MASTER_PORT | 主節點用于通信的端口 |
那么 這些變量是如何參與進程通信初始化的? 這就涉及到 PyTorch 的核心函數:
二、init_process_group
torch.distributed.init_process_group?是 PyTorch 初始化分布式通信的入口:
torch.distributed.init_process_group(backend="nccl", # 或者 "gloo"、"mpi"init_method="env://", # 通過環境變量讀取設置
)
關鍵點:
-
backend="nccl":推薦用于 GPU 分布式通信(高性能) -
init_method="env://":表示通過環境變量來初始化
你不需要自己設置 RANK / WORLD_SIZE / MASTER_ADDR,只要寫:
import torch.distributed as distdist.init_process_group(backend="nccl", init_method="env://")
PyTorch 會自動去環境中讀這些變量:
-
RANK→ 當前進程編號 -
WORLD_SIZE→ 總進程數 -
MASTER_ADDR、MASTER_PORT→ 主節點 IP 和端口
然后就能正確初始化所有通信進程。
三、腳本中通常的典型寫法
import os
import torch# 初始化 PyTorch 分布式通信環境
torch.distributed.init_process_group(backend="nccl", init_method="env://")# 獲取全局/本地 rank、world size
rank = int(os.environ.get("RANK", -1))
local_rank = int(os.environ.get("LOCAL_RANK", -1))
world_size = int(os.environ.get("WORLD_SIZE", -1))# 設置 GPU 顯卡綁定
torch.cuda.set_device(local_rank)
device = torch.device("cuda")# 打印綁定信息
print(f"[RANK {rank} | LOCAL_RANK {local_rank}] Using CUDA device {torch.cuda.current_device()}: {torch.cuda.get_device_name(torch.cuda.current_device())} | World size: {world_size}")
這段代碼在所有進程中都一樣寫,但每個進程啟動時帶的環境變量不同,所以最終 rank、local_rank、world_size 就自然不同了。
通用啟動腳本
#!/bin/bash# 設置基本參數
MASTER_ADDR=192.168.5.228 # 主機IP
MASTER_PORT=29400 # 主機端口
NNODES=2 # 參與訓練的總機器數
NPROC_PER_NODE=2 # 每臺機器上的進程數# 所有網卡的IP地址,用于篩選
ALL_LOCAL_IPS=$(hostname -I)
# 根據本機 IP 配置通信接口
if [[ "$ALL_LOCAL_IPS" == *"192.168.5.228"* ]]; thenNODE_RANK=0 # 表示當前機器是第0臺機器IFNAME=ens1f1np1 mytorchrun=~/anaconda3/envs/dglv2/bin/torchrun
elif [[ "$ALL_LOCAL_IPS" == *"192.168.5.229"* ]]; thenNODE_RANK=1 # 表示當前機器是第1臺機器IFNAME=ens2f1np1mytorchrun=/opt/software/anaconda3/envs/dglv2/bin/torchrun
elseexit 1
fi# 設置 RDMA 接口
export NCCL_IB_DISABLE=0 # 是否禁用InfiniBand
export NCCL_IB_HCA=mlx5_1 # 使用哪個RDMA接口進行通信
export NCCL_SOCKET_IFNAME=$IFNAME # 使用哪個網卡進行通信
export NCCL_DEBUG=INFO # 可選:調試用
export GLOO_IB_DISABLE=0 # 是否禁用InfiniBand
export GLOO_SOCKET_IFNAME=$IFNAME # 使用哪個網卡進行通信
export PYTHONUNBUFFERED=1 # 實時輸出日志# 啟動分布式任務
$mytorchrun \--nnodes=$NNODES \--nproc_per_node=$NPROC_PER_NODE \--node_rank=$NODE_RANK \--master_addr=$MASTER_ADDR \--master_port=$MASTER_PORT \cluster.py## 如果想獲取準確報錯位置,可以加以下內容,這樣可以同步所有 CUDA 操作,錯誤不會“延遲觸發”,你會看到確切是哪一行代碼出了問題:
## CUDA_LAUNCH_BLOCKING=1 torchrun ...





)












