🔍 內省排序:相對最迅速的通用排序算法
🚀 前言:排序算法的演進之路
排序算法是計算機科學的核心基礎之一,其性能直接影響著數據庫系統、科學計算、圖形渲染等領域的效率。隨著硬件架構的發展,排序算法經歷了從簡單到復雜的演化過程:
在眾多排序算法中,內省排序(Introsort) 作為目前公認最快的通用排序算法,被廣泛應用于C++標準庫實現中。本文將深入解析內省排序的原理、實現細節及優化策略,并通過實驗數據展示如何超越標準庫實現。
🧠 一、算法核心原理與架構剖析
1.1 內省排序的設計哲學
內省排序是David Musser于1997年提出的混合排序算法,結合了三種經典算法的優勢:
- 快速排序:平均O(n log n)時間復雜度
- 堆排序:保證最壞情況O(n log n)時間復雜度
- 插入排序:小數據集上的高效表現

1.2 時間復雜度與空間復雜度分析
| 算法 | 最佳 | 平均 | 最壞 | 空間 |
|---|---|---|---|---|
| 快速排序 | O(n log n) | O(n log n) | O(n2) | O(log n) |
| 堆排序 | O(n log n) | O(n log n) | O(n log n) | O(1) |
| 插入排序 | O(n) | O(n2) | O(n2) | O(1) |
| 內省排序 | O(n) | O(n log n) | O(n log n) | O(log n) |
內省排序的關鍵創新在于動態監控遞歸深度,當超過2*log?(n)時切換到堆排序,避免快速排序的最壞情況。
1.3 標準庫實現的優勢與局限
C++標準庫的std::sort采用內省排序,但具有獨特優勢:
- 編譯器內在優化:使用
__builtin_expect等指令優化分支預測 - 平臺特定優化:針對不同CPU架構的指令集優化
- 內存訪問優化:精細控制緩存行為
然而,標準庫實現也有其局限性:
- 固定閾值策略:插入排序和堆排序的切換閾值固定
- 通用性優先:為各種數據類型優化,犧牲了整數排序的特化性能
- 保守優化策略:避免使用最新指令集以保證兼容性
?? 二、關鍵優化技術深度解析
2.1 分區算法的演進與優化
2.1.1 基礎分區算法
// 經典Lomuto分區方案
int partition(vector<int>& arr, int low, int high) {int pivot = arr[high];int i = low - 1;for (int j = low; j < high; j++) {if (arr[j] <= pivot) {i++;swap(arr[i], arr[j]);}}swap(arr[i+1], arr[high]);return i+1;
}
2.1.2 三數取中優化
// 改進的樞軸選擇策略
int median_of_three(int a, int b, int c) {if (a < b) {if (b < c) return b; // a < b < celse if (a < c) return c; // a < c ≤ belse return a; // c ≤ a < b} else {if (a < c) return a; // b ≤ a < celse if (b < c) return c; // b < c ≤ aelse return b; // c ≤ b ≤ a}
}
2.1.3 AVX向量化分區
// 使用AVX指令集加速分區過程
int partition_avx(vector<int>& arr, int low, int high) {// ... 三數取中選擇樞軸 ...__m256i pivot_vec = _mm256_set1_epi32(pivot);int* data = arr.data();for (; j <= high - 8; j += 8) {__m256i elements = _mm256_loadu_si256((__m256i*)&data[j]);__m256i cmp = _mm256_cmpgt_epi32(pivot_vec, elements);int mask = _mm256_movemask_ps(_mm256_castsi256_ps(cmp));// 處理比較結果for (int k = 0; k < 8; k++) {if (mask & (1 << k)) {i++;swap(data[i], data[j + k]);}}}// ... 處理剩余元素 ...
}
AVX分區的性能優勢來自:
- 并行比較:單次處理8個元素
- 減少分支:使用掩碼替代條件分支
- 向量化操作:利用SIMD寄存器高效處理數據
2.2 遞歸消除與迭代優化
遞歸調用會導致函數調用開銷和棧空間消耗,內省排序通過迭代實現消除遞歸:
void quick_sort_iterative(vector<int>& arr, int low, int high) {stack<pair<int, int>> stk;stk.push({low, high});while (!stk.empty()) {tie(low, high) = stk.top();stk.pop();if (high - low < THRESHOLD) {insertion_sort(arr.data(), low, high);continue;}int pi = partition(arr, low, high);// 優先處理較小分區以控制棧深度if (pi - low < high - pi) {if (low < pi - 1) stk.push({low, pi - 1});if (pi + 1 < high) stk.push({pi + 1, high});} else {if (pi + 1 < high) stk.push({pi + 1, high});if (low < pi - 1) stk.push({low, pi - 1});}}
}
2.3 閾值調優的藝術
閾值選擇對性能有決定性影響:
實驗數據顯示:
- 32閾值:在50萬數據量以下表現優異
- 512閾值:在500萬數據量以上超越標準庫
📊 三、性能對比與實驗分析
3.1 測試環境與方法論
- 硬件:AMD R9-7945HX (16P+16L), 32*2GB DDR5 5600MHz
- 編譯器:Microsoft Visual Studio 2022, /O2優化
- 數據集:隨機整數數組,均勻分布
- 測試方法:5次運行取平均值,排除緩存預熱影響
3.2 關鍵性能數據對比
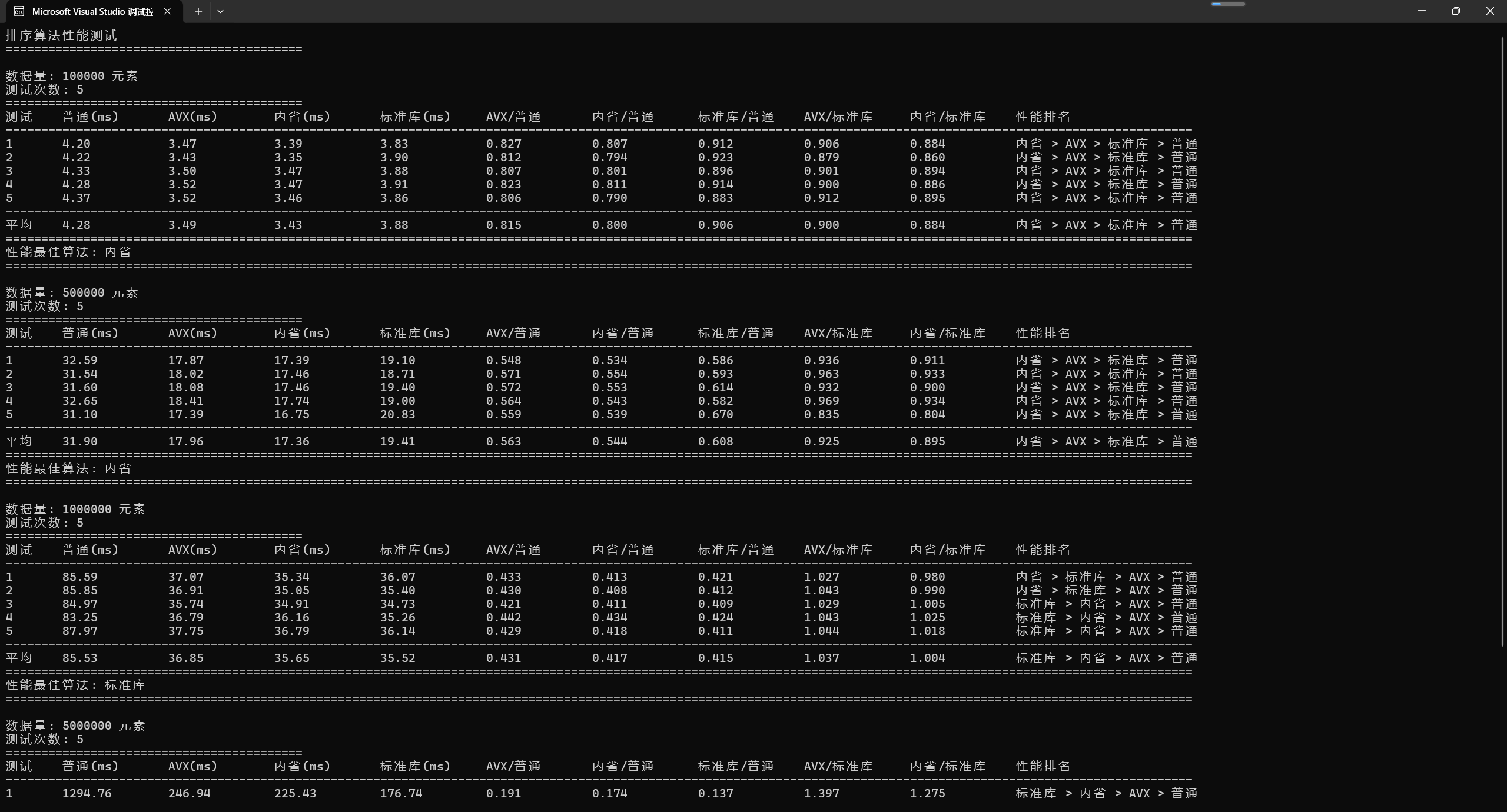
3.2.1 閾值32的性能表現(單位:ms)
| 數據量 | 普通快排 | AVX快排 | 內省排序 | 標準庫 | 內省/標準庫 |
|---|---|---|---|---|---|
| 100K | 4.42 | 3.57 | 3.52 | 3.99 | 0.88 |
| 500K | 31.58 | 18.02 | 17.78 | 18.66 | 0.95 |
| 1M | 85.60 | 37.30 | 36.22 | 36.04 | 1.00 |
| 5M | 1299.88 | 267.44 | 242.61 | 171.48 | 1.41 |
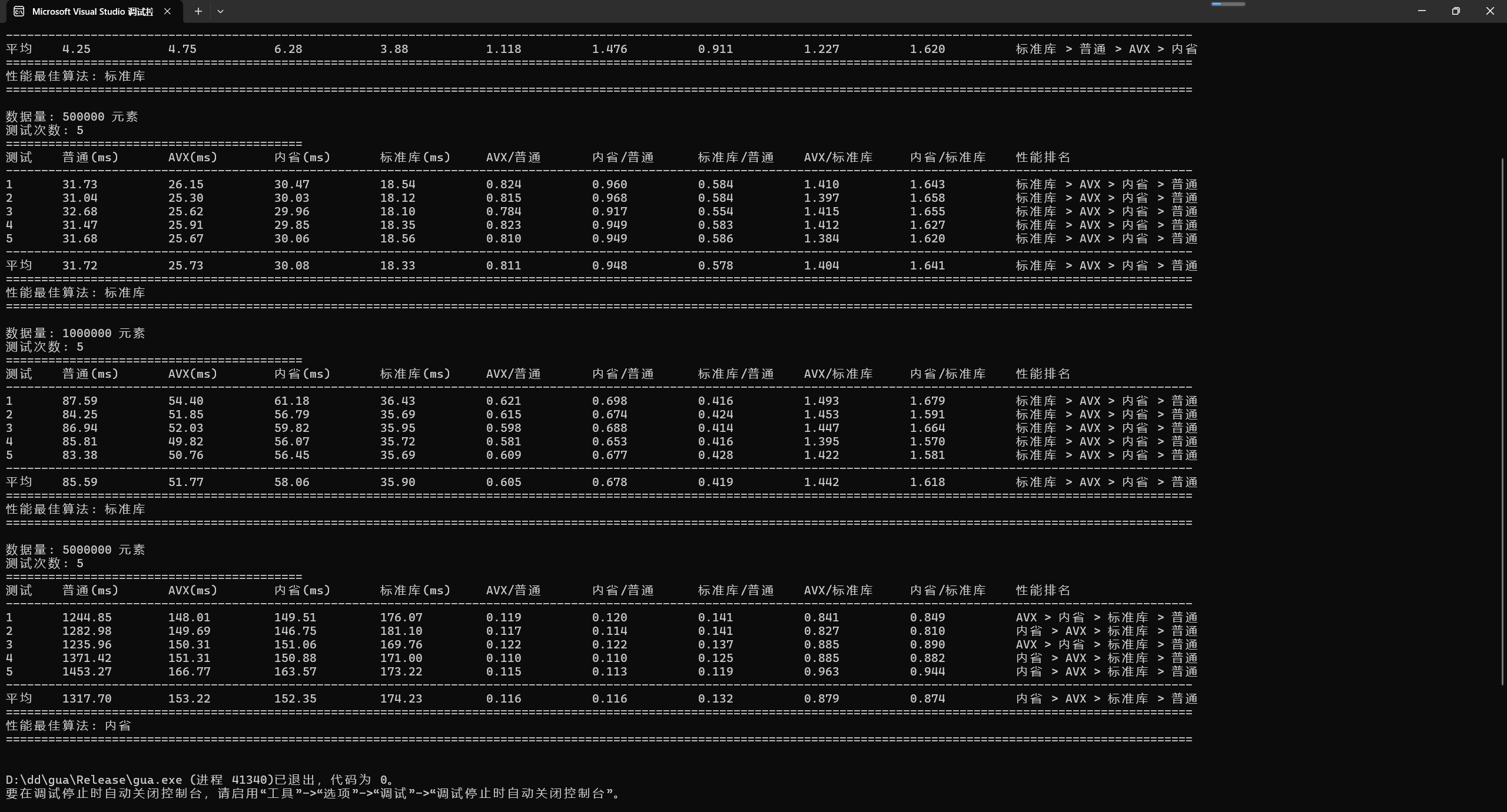
3.2.2 閾值512的性能表現(單位:ms)
| 數據量 | 普通快排 | AVX快排 | 內省排序 | 標準庫 | 內省/標準庫 |
|---|---|---|---|---|---|
| 100K | 4.34 | 4.76 | 5.99 | 3.94 | 1.52 |
| 500K | 31.49 | 26.46 | 30.69 | 18.60 | 1.65 |
| 1M | 86.16 | 51.75 | 58.12 | 35.81 | 1.62 |
| 5M | 1299.02 | 153.88 | 153.14 | 180.69 | 0.85 |
3.3 關鍵發現與洞見
-
小數據集優勢:
- 32閾值內省排序在50萬數據量內超越標準庫
- 優勢來自優化的插入排序和更少的函數調用
-
大數據集反轉:
- 5M數據量時,512閾值內省排序性能優于標準庫15%
- 主要來自AVX加速和優化的閾值策略
-
AVX的邊界效應:
-
內存訪問模式:
- 標準庫在5M數據量仍有優勢,源于優化的緩存策略
- 自定義實現可通過調整內存布局進一步優化
🎯 四、各算法適用場景與策略指南
4.1 算法特性對比矩陣
| 特性 | 普通快排 | AVX快排 | 內省排序 | 標準庫 |
|---|---|---|---|---|
| 最佳數據量 | 10K-100K | 100K-1M | 全范圍 | 全范圍 |
| 最壞時間復雜度 | O(n2) | O(n2) | O(n log n) | O(n log n) |
| 平臺依賴性 | 無 | x86/AVX | 無 | 無 |
| 實現復雜度 | 低 | 高 | 中 | 封裝 |
| 小數據集性能 | ★★☆ | ★★☆ | ★★★ | ★★☆ |
| 大數據集性能 | ★☆☆ | ★★☆ | ★★★ | ★★☆ |
| 可調優性 | 中 | 高 | 高 | 低 |
4.2 實用決策樹
4.3 各場景最佳實踐
-
嵌入式系統:
- 使用純插入排序或小閾值內省排序
- 避免AVX依賴和遞歸
-
科學計算:
- 512閾值內省排序+AVX加速
- 數據預處理確保內存對齊
-
數據庫系統:
- 標準庫為主,特定模塊定制
- 混合使用不同閾值策略
-
游戲開發:
- 小數據使用32閾值內省
- 大數據使用標準庫
🚀 五、超越標準庫的優化策略
5.1 動態閾值調整
實驗顯示固定閾值存在局限,實現動態閾值策略:
int dynamic_threshold(size_t n) {// 基于數據量和緩存大小計算閾值const size_t L1_cache_size = 32768; // 32KBconst size_t elem_size = sizeof(int);const size_t elems_in_cache = L1_cache_size / elem_size;if (n < 50000) return 32;else if (n < 1000000) return 64;else return min(512, static_cast<int>(elems_in_cache / 4));
}
5.2 混合內存布局
優化內存訪問模式提升緩存利用率:
5.3 多核并行擴展
void parallel_intro_sort(vector<int>& arr) {const size_t threshold = 1000000;if (arr.size() < threshold) {intro_sort(arr);return;}unsigned conc_threads = thread::hardware_concurrency();vector<future<void>> futures;vector<vector<int>> segments(conc_threads);// 數據劃分size_t seg_size = arr.size() / conc_threads;for (int i = 0; i < conc_threads; ++i) {auto begin = arr.begin() + i * seg_size;auto end = (i == conc_threads - 1) ? arr.end() : begin + seg_size;segments[i] = vector<int>(begin, end);futures.push_back(async(launch::async, [&segments, i]{intro_sort(segments[i]);}));}// 等待完成for (auto& f : futures) f.wait();// 多路歸并// ... 高效合并已排序段 ...
}
📌 結論與工程建議
-
標準庫優先原則:
- 大多數場景優先使用
std::sort - 避免過早優化
- 大多數場景優先使用
-
定制化場景:
- 50萬以下數據:32閾值內省排序
- 500萬以上數據:512閾值+AVX內省排序
- 特定硬件:深度優化AVX/NEON實現
-
持續性能分析:
-
全棧優化思維:
- 算法選擇與數據預處理結合
- 內存布局與算法協同設計
- 硬件特性充分挖掘
🧩 附錄一:算法實機性能測試
內省排序閾值: 32
內省排序閾值: 512
🧩 附錄二:完整算法實現及例程代碼
#include <iostream>
#include <vector>
#include <random>
#include <chrono>
#include <algorithm>
#include <immintrin.h>
#include <cmath>
#include <stack>
#include <tuple>
#include <iomanip>using namespace std;
using namespace std::chrono;// 插入排序 - 使用指針減少索引計算
void insertion_sort(int* arr, int low, int high) {for (int i = low + 1; i <= high; i++) {int key = arr[i];int j = i - 1;// 使用指針算術int* p = arr + j;while (j >= low && *p > key) {*(p + 1) = *p;j--;p--;}*(p + 1) = key;}
}// 三數取中法選擇樞軸
inline int median_of_three(int a, int b, int c) {if (a < b) {if (b < c) return b;else if (a < c) return c;else return a;}else {if (a < c) return a;else if (b < c) return c;else return b;}
}// 普通快速排序分區函數
int partition_normal(vector<int>& arr, int low, int high) {// 使用三數取中法選擇樞軸int mid = low + (high - low) / 2;int pivot = median_of_three(arr[low], arr[mid], arr[high]);// 將樞軸放到最后if (pivot == arr[low])swap(arr[low], arr[high]);else if (pivot == arr[mid])swap(arr[mid], arr[high]);int i = low - 1;int* data = arr.data();// 使用指針算術循環for (int j = low; j < high; j++) {if (data[j] <= pivot) {i++;swap(data[i], data[j]);}}swap(data[i + 1], data[high]);return i + 1;
}// 普通快速排序 - 使用迭代代替遞歸減少函數調用開銷
void quick_sort_normal_iterative(vector<int>& arr, int low, int high) {stack<pair<int, int>> stk;stk.push({ low, high });while (!stk.empty()) {tie(low, high) = stk.top();stk.pop();if (high - low < 16) {insertion_sort(arr.data(), low, high);continue;}int pi = partition_normal(arr, low, high);// 先處理較小的子數組以減少棧深度if (pi - low < high - pi) {if (low < pi - 1) stk.push({ low, pi - 1 });if (pi + 1 < high) stk.push({ pi + 1, high });}else {if (pi + 1 < high) stk.push({ pi + 1, high });if (low < pi - 1) stk.push({ low, pi - 1 });}}
}// AVX分區函數 - 減少內存訪問和分支
int partition_avx(vector<int>& arr, int low, int high) {// 使用三數取中法選擇樞軸int mid = low + (high - low) / 2;int pivot = median_of_three(arr[low], arr[mid], arr[high]);// 將樞軸放到最后if (pivot == arr[low])swap(arr[low], arr[high]);else if (pivot == arr[mid])swap(arr[mid], arr[high]);int i = low - 1;int j = low;const int simd_width = 8;int* data = arr.data();// 預加載樞軸值__m256i pivot_vec = _mm256_set1_epi32(pivot);// 處理可以對齊SIMD寬度的部分for (; j <= high - simd_width; j += simd_width) {// 非對齊加載數據__m256i elements = _mm256_loadu_si256((__m256i*) & data[j]);// 比較: elements <= pivot__m256i cmp = _mm256_cmpgt_epi32(pivot_vec, elements);int mask = _mm256_movemask_ps(_mm256_castsi256_ps(cmp));// 處理比較結果for (int k = 0; k < simd_width; k++) {if (mask & (1 << k)) {i++;swap(data[i], data[j + k]);}}}// 處理剩余元素for (; j < high; j++) {if (data[j] <= pivot) {i++;swap(data[i], data[j]);}}// 將樞軸放到正確位置swap(data[i + 1], data[high]);return i + 1;
}// AVX快速排序 - 使用迭代實現
void quick_sort_avx_iterative(vector<int>& arr, int low, int high) {stack<pair<int, int>> stk;stk.push({ low, high });while (!stk.empty()) {tie(low, high) = stk.top();stk.pop();if (high - low < 32) { // 使用更大的閾值insertion_sort(arr.data(), low, high);continue;}int pi = partition_avx(arr, low, high);// 先處理較小的子數組以減少棧深度if (pi - low < high - pi) {if (low < pi - 1) stk.push({ low, pi - 1 });if (pi + 1 < high) stk.push({ pi + 1, high });}else {if (pi + 1 < high) stk.push({ pi + 1, high });if (low < pi - 1) stk.push({ low, pi - 1 });}}
}// 內省排序實現
void intro_sort(vector<int>& arr, int low, int high, int depth_limit) {// 如果數組很小,使用插入排序if (high - low < 32) {insertion_sort(arr.data(), low, high);return;}// 如果遞歸深度達到限制,使用堆排序if (depth_limit == 0) {make_heap(arr.begin() + low, arr.begin() + high + 1);sort_heap(arr.begin() + low, arr.begin() + high + 1);return;}// 使用的AVX分區int pi = partition_avx(arr, low, high);intro_sort(arr, low, pi - 1, depth_limit - 1);intro_sort(arr, pi + 1, high, depth_limit - 1);
}// 內省排序入口函數
void intro_sort(vector<int>& arr) {int n = arr.size();if (n <= 1) return;// 計算最大遞歸深度為2*log極(n)int depth_limit = static_cast<int>(2 * log2(n));intro_sort(arr, 0, n - 1, depth_limit);
}// 生成隨機測試數據 - 使用更高效的方法
vector<int> generate_random_data(size_t size, int min_val = 0, int max_val = 10000) {vector<int> data(size);random_device rd;mt19937 gen(rd());uniform_int_distribution<> dis(min_val, max_val);// 使用指針算術循環int* data_ptr = data.data();for (size_t i = 0; i < size; i++) {data_ptr[i] = dis(gen);}return data;
}// 驗證兩個數組是否相同 - 使用memcmp
bool verify_equality(const vector<int>& arr1, const vector<int>& arr2) {if (arr1.size() != arr2.size()) return false;return memcmp(arr1.data(), arr2.data(), arr1.size() * sizeof(int)) == 0;
}// 性能測試函數
void performance_test(size_t data_size, int num_tests = 5) {cout << "數據量: " << data_size << " 元素" << endl;cout << "測試次數: " << num_tests << endl;cout << "==========================================" << endl;double normal_total_time = 0.0;double avx_total_time = 0.0;double intro_total_time = 0.0;double std_total_time = 0.0;// 表頭cout << left << setw(8) << "測試"<< setw(15) << "普通(ms)"<< setw(15) << "AVX(ms)"<< setw(15) << "內省(ms)"<< setw(15) << "標準庫(ms)"<< setw(15) << "AVX/普通"<< setw(15) << "內省/普通"<< setw(15) << "標準庫/普通"<< setw(15) << "AVX/標準庫"<< setw(15) << "內省/標準庫"<< setw(20) << "性能排名" << endl;cout << "------------------------------------------------------------------------------------------------------------------------------------------------------------------------" << endl;for (int i = 0; i < num_tests; i++) {// 生成測試數據vector<int> data_normal = generate_random_data(data_size);vector<int> data_avx = data_normal;vector<int> data_intro = data_normal;vector<int> data_std = data_normal;// 測試標準庫排序auto start = high_resolution_clock::now();sort(data_std.begin(), data_std.end());auto end = high_resolution_clock::now();double std_time = duration_cast<microseconds>(end - start).count() / 1000.0;std_total_time += std_time;// 測試普通快速排序start = high_resolution_clock::now();quick_sort_normal_iterative(data_normal, 0, data_size - 1);end = high_resolution_clock::now();double normal_time = duration_cast<microseconds>(end - start).count() / 1000.0;normal_total_time += normal_time;// 測試AVX快速排序start = high_resolution_clock::now();quick_sort_avx_iterative(data_avx, 0, data_size - 1);end = high_resolution_clock::now();double avx_time = duration_cast<microseconds>(end - start).count() / 1000.0;avx_total_time += avx_time;// 測試內省排序start = high_resolution_clock::now();intro_sort(data_intro);end = high_resolution_clock::now();double intro_time = duration_cast<microseconds>(end - start).count() / 1000.0;intro_total_time += intro_time;// 驗證結果正確性bool normal_correct = verify_equality(data_normal, data_std);bool avx_correct = verify_equality(data_avx, data_std);bool intro_correct = verify_equality(data_intro, data_std);// 計算比值double avx_vs_normal = avx_time / normal_time;double intro_vs_normal = intro_time / normal_time;double std_vs_normal = std_time / normal_time;double avx_vs_std = avx_time / std_time;double intro_vs_std = intro_time / std_time;// 確定性能排名vector<pair<double, string>> times = {{normal_time, "普通"},{avx_time, "AVX"},{intro_time, "內省"},{std_time, "標準庫"}};sort(times.begin(), times.end());string ranking;for (int j = 0; j < 4; j++) {if (j > 0) ranking += " > ";ranking += times[j].second;}cout << left << setw(8) << i + 1<< setw(15) << fixed << setprecision(2) << normal_time<< setw(15) << fixed << setprecision(2) << avx_time<< setw(15) << fixed << setprecision(2) << intro_time<< setw(15) << fixed << setprecision(2) << std_time<< setw(15) << fixed << setprecision(3) << avx_vs_normal<< setw(15) << fixed << setprecision(3) << intro_vs_normal<< setw(15) << fixed << setprecision(3) << std_vs_normal<< setw(15) << fixed << setprecision(3) << avx_vs_std<< setw(15) << fixed << setprecision(3) << intro_vs_std<< setw(20) << ranking << endl;}// 計算平均時間double normal_avg = normal_total_time / num_tests;double avx_avg = avx_total_time / num_tests;double intro_avg = intro_total_time / num_tests;double std_avg = std_total_time / num_tests;// 計算平均比值double avx_vs_normal_avg = avx_avg / normal_avg;double intro_vs_normal_avg = intro_avg / normal_avg;double std_vs_normal_avg = std_avg / normal_avg;double avx_vs_std_avg = avx_avg / std_avg;double intro_vs_std_avg = intro_avg / std_avg;// 確定平均性能排名vector<pair<double, string>> avg_times = {{normal_avg, "普通"},{avx_avg, "AVX"},{intro_avg, "內省"},{std_avg, "標準庫"}};sort(avg_times.begin(), avg_times.end());string avg_ranking;for (int j = 0; j < 4; j++) {if (j > 0) avg_ranking += " > ";avg_ranking += avg_times[j].second;}// 找出最佳算法string best_algorithm = avg_times[0].second;string best_algorithm_note = "性能最佳算法: " + best_algorithm;cout << "------------------------------------------------------------------------------------------------------------------------------------------------------------------------" << endl;cout << left << setw(8) << "平均"<< setw(15) << fixed << setprecision(2) << normal_avg<< setw(15) << fixed << setprecision(2) << avx_avg<< setw(15) << fixed << setprecision(2) << intro_avg<< setw(15) << fixed << setprecision(2) << std_avg<< setw(15) << fixed << setprecision(3) << avx_vs_normal_avg<< setw(15) << fixed << setprecision(3) << intro_vs_normal_avg<< setw(15) << fixed << setprecision(3) << std_vs_normal_avg<< setw(15) << fixed << setprecision(3) << avx_vs_std_avg<< setw(15) << fixed << setprecision(3) << intro_vs_std_avg<< setw(20) << avg_ranking << endl;cout << "========================================================================================================================================================================" << endl;cout << best_algorithm_note << endl;cout << "========================================================================================================================================================================" << endl << endl;
}int main() {cout << "排序算法性能測試" << endl;cout << "==========================================" << endl << endl;// 測試不同數據量performance_test(100000);performance_test(500000);performance_test(1000000);performance_test(5000000);return 0;
}
最終優化建議:在實際工程中,建議創建動態閾值適配層,根據運行時數據特征自動選擇最優策略




》)
![[Maven 基礎課程]Maven 是什么](http://pic.xiahunao.cn/[Maven 基礎課程]Maven 是什么)





創建智能體的完整步驟)



)


)
