視頻分類模型簡介
?X3D 系列模型
官方網站
https://github.com/facebookresearch/SlowFast
?提出論文?
Facebook Research 的《X3D: Expanding Architectures for Efficient Video Recognition》
https://arxiv.org/pdf/2004.04730
原理
????????X3D 的設計思路受到機器學習中特征選擇方法的啟發,它基于 X2D 圖像分類模型,通過一種逐步擴展的方式,將 2D 空間建模拓展為 3D 時空建模。具體來說,X3D 在網絡的寬度、深度、幀率、幀數和分辨率等維度上,依次只對單一維度進行擴展,并在每一步中綜合考慮計算量與精度表現,從而選擇最優的擴展策略。
X3D通過6個軸來對X2D進行拓展,X2D在這6個軸上都為1。
拓張維度
| 維度? | ?物理意義 | 優化影響 |
| X-Temporal | 采樣幀數(視頻片段長度) | 增強長時序上下文感知能力(如手勢識別) |
| X-Fast | 幀率(采樣間隔縮短) | 提升時間分辨率,優化快速捕捉(如體育動作分解) |
| X-Spatial | 輸入空間分辨率(112→224) | 提升細節識別能力(需同步增加網絡深度以擴大感受野) |
| X-Depth | 網絡層數(ResNet階段數) | 增強特征抽象能力,匹配高分辨率輸入要求 |
| X-Width | 通道數 | 提升特征表達能力(計算量≈通道數2×分辨率2) |
| X-Bottleneck | Bottleneck層通道寬度 | 優化計算效率:擴展內部通道可平衡精度與計算量(優于全局加寬) |
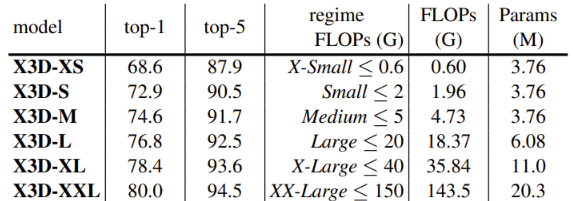
模型結果指標和參數量
數據準備
數據集根目錄/
├── train/ ? ? ? ? ? ? ? ? ?# 訓練集
│ ? ├── flow/ ? ? ? ? ? ? ?# 類別1(正常視頻流)
│ ? │ ? ├── video1.mp4
│ ? │ ? └── video2.avi
│ ? └── freeze/ ? ? ? ? ? ?# 類別2(視頻凍結)
│ ? ? ? ├── video3.mp4
│ ? ? ? └── video4.mov
└── val/ ? ? ? ? ? ? ? ? ? # 驗證集
? ? ├── flow/
? ? │ ? ├── video5.mp4
? ? │ ? └── video6.avi
? ? └── freeze/
? ? ? ? ├── video7.mp4
? ? ? ? └── video8.mkv
訓練代碼
import os
import sys
import time
import copy
import argparse
import random
import warnings
from pathlib import Path
from typing import List, Tupleimport numpy as np
import torch
import torch.nn as nn
from torch.utils.data import Dataset, DataLoader, WeightedRandomSamplerfrom torchvision.io import read_video
from torchvision.transforms import functional as TF# --------------------------- 工具 ---------------------------def set_seed(seed: int = 42):random.seed(seed)np.random.seed(seed)torch.manual_seed(seed)torch.cuda.manual_seed_all(seed)def list_videos(root: Path, exts=(".mp4", ".avi", ".mov", ".mkv")) -> List[Path]:files = []for ext in exts:files += list(root.rglob(f"*{ext}"))return sorted(files)def count_labels(samples: List[Tuple[Path, int]], num_classes: int = 2):counts = [0] * num_classesfor _, y in samples:counts[y] += 1return counts# --------------------------- 數據集 ---------------------------class VideoFolderDataset(Dataset):"""讀取 root/{split}/{class}/*.mp4- 均勻采樣 T 幀(不足補尾幀)- 訓練:隨機短邊縮放、隨機裁剪、概率翻轉驗證:短邊定值、中心裁剪- 輸出 (C,T,H,W) float32,[0,1] 標準化(Kinetics 統計)"""def __init__(self,root: str,split: str = "train",classes: Tuple[str, str] = ("flow", "freeze"),frames: int = 16,short_side: int = 256,crop_size: int = 224,mean: Tuple[float, float, float] = (0.45, 0.45, 0.45),std: Tuple[float, float, float] = (0.225, 0.225, 0.225),allow_corrupt_skip: bool = True,train_scale_jitter: Tuple[float, float] = (0.8, 1.2),hflip_prob: float = 0.5,):super().__init__()self.root = Path(root)self.split = splitself.frames = framesself.short_side = short_sideself.crop_size = crop_sizeself.mean = torch.tensor(mean).view(3, 1, 1, 1)self.std = torch.tensor(std).view(3, 1, 1, 1)self.classes = tuple(sorted(classes))self.class_to_idx = {c: i for i, c in enumerate(self.classes)}self.allow_corrupt_skip = allow_corrupt_skipself.train_scale_jitter = train_scale_jitterself.hflip_prob = hflip_prob if split == "train" else 0.0self.samples: List[Tuple[Path, int]] = []for c in self.classes:cdir = self.root / split / cvids = list_videos(cdir)for v in vids:self.samples.append((v, self.class_to_idx[c]))if len(self.samples) == 0:raise FileNotFoundError(f"No videos found in {self.root}/{split}/({self.classes}).")if self.allow_corrupt_skip:keep = []for p, y in self.samples:try:vframes, _, _ = read_video(str(p), pts_unit="sec", output_format="TCHW", start_pts=0, end_pts=0.1)if vframes.numel() == 0:continuekeep.append((p, y))except Exception:print(f"?? 跳過無法讀取的視頻: {p}")if keep:self.samples = keepself.label_counts = count_labels(self.samples, num_classes=len(self.classes))def __len__(self):return len(self.samples)@staticmethoddef _uniform_indices(total: int, num: int) -> np.ndarray:if total <= 0:return np.zeros((num,), dtype=np.int64)if total >= num:idx = np.linspace(0, total - 1, num=num)return np.round(idx).astype(np.int64)else:base = list(range(total))base += [total - 1] * (num - total)return np.array(base, dtype=np.int64)def _load_video_tensor(self, path: Path) -> torch.Tensor:vframes, _, _ = read_video(str(path), pts_unit="sec", output_format="TCHW")if vframes.numel() == 0:raise RuntimeError("Empty video tensor.")if vframes.shape[1] == 1:vframes = vframes.repeat(1, 3, 1, 1)return vframes # (T,C,H,W)def __getitem__(self, idx: int):path, label = self.samples[idx]try:v = self._load_video_tensor(path)except Exception:if self.allow_corrupt_skip:new_idx = random.randint(0, len(self.samples) - 1)path, label = self.samples[new_idx]v = self._load_video_tensor(path)else:raiseT, C, H, W = v.shape# 均勻采樣 frames 幀idxs = self._uniform_indices(T, self.frames)v = v[idxs]if self.split == "train":scale = random.uniform(self.train_scale_jitter[0], self.train_scale_jitter[1])target_ss = max(64, int(self.short_side * scale))v = TF.resize(v, target_ss, antialias=True)_, _, H2, W2 = v.shapeif H2 < self.crop_size or W2 < self.crop_size:min_ss = max(self.crop_size, min(H2, W2))v = TF.resize(v, min_ss, antialias=True)_, _, H2, W2 = v.shapetop = random.randint(0, H2 - self.crop_size)left = random.randint(0, W2 - self.crop_size)v = TF.crop(v, top, left, self.crop_size, self.crop_size)if random.random() < self.hflip_prob:v = torch.flip(v, dims=[-1])else:v = TF.resize(v, self.short_side, antialias=True)v = TF.center_crop(v, [self.crop_size, self.crop_size])v = v.permute(1, 0, 2, 3).contiguous() # (C,T,H,W)v = v.float() / 255.0v = (v - self.mean) / self.stdreturn v, torch.tensor(label, dtype=torch.long)# --------------------------- 模型構建(含預訓練) ---------------------------def build_model(arch: str, frames: int, crop_size: int, num_classes: int = 2, pretrained: bool = True) -> nn.Module:arch = arch.lower()if arch in {"x3d_s", "x3d_m"}:model = torch.hub.load('facebookresearch/pytorchvideo', arch, pretrained=pretrained)if hasattr(model.blocks[-1], "proj") and isinstance(model.blocks[-1].proj, nn.Linear):in_feats = model.blocks[-1].proj.in_featuresmodel.blocks[-1].proj = nn.Linear(in_feats, num_classes)else:head = model.blocks[-1]proj = Nonefor _, m in head.named_modules():if isinstance(m, nn.Linear):proj = m; breakif proj is None:raise RuntimeError("未找到X3D分類頭線性層,請升級 pytorchvideo 或改用 torchvision 模型。")in_feats = proj.in_featuresmodel.blocks[-1].proj = nn.Linear(in_feats, num_classes)return modelelif arch in {"r2plus1d_18", "r3d_18"}:from torchvision.models.video import r2plus1d_18, r3d_18from torchvision.models.video import R2Plus1D_18_Weights, R3D_18_Weightsif arch == "r2plus1d_18":weights = R2Plus1D_18_Weights.KINETICS400_V1 if pretrained else Nonemodel = r2plus1d_18(weights=weights)else:weights = R3D_18_Weights.KINETICS400_V1 if pretrained else Nonemodel = r3d_18(weights=weights)in_feats = model.fc.in_featuresmodel.fc = nn.Linear(in_feats, num_classes)return modelelse:raise ValueError(f"未知 arch: {arch}. 可選: x3d_s, x3d_m, r2plus1d_18, r3d_18")def set_backbone_trainable(model: nn.Module, trainable: bool, arch: str):for p in model.parameters():p.requires_grad = trainableif arch.startswith("x3d"):for p in model.blocks[-1].parameters():p.requires_grad = Trueelse:for p in model.fc.parameters():p.requires_grad = Truedef get_head_parameters(model: nn.Module, arch: str):return list(model.blocks[-1].parameters()) if arch.startswith("x3d") else list(model.fc.parameters())# --------------------------- EMA / TTA / Metrics ---------------------------class ModelEMA:"""Exponential Moving Average of model parameters."""def __init__(self, model: nn.Module, decay: float = 0.999):self.ema = copy.deepcopy(model).eval()for p in self.ema.parameters():p.requires_grad_(False)self.decay = decay@torch.no_grad()def update(self, model: nn.Module):d = self.decaymsd = model.state_dict()esd = self.ema.state_dict()for k in esd.keys():v = esd[k]mv = msd[k]if isinstance(v, torch.Tensor) and v.dtype.is_floating_point:esd[k].mul_(d).add_(mv.detach(), alpha=1 - d)else:esd[k].copy_(mv)@torch.no_grad()
def _forward_with_tta(model: nn.Module, x: torch.Tensor, tta_flip: bool):logits = model(x)if tta_flip:x_flip = torch.flip(x, dims=[-1])logits = logits + model(x_flip)logits = logits / 2.0return logits@torch.no_grad()
def evaluate(model: nn.Module, loader: DataLoader, device: str = "cuda", tta_flip: bool = False):model.eval()total, correct, loss_sum = 0, 0, 0.0criterion = nn.CrossEntropyLoss()amp_ctx = torch.amp.autocast(device_type='cuda', dtype=torch.float16, enabled=(device == "cuda"))for x, y in loader:x = x.to(device, non_blocking=True).float()y = y.to(device, non_blocking=True)with amp_ctx:logits = _forward_with_tta(model, x, tta_flip)loss = criterion(logits, y)loss_sum += loss.item() * y.size(0)pred = logits.argmax(dim=1)correct += (pred == y).sum().item()total += y.size(0)return correct / max(1, total), loss_sum / max(1, total)@torch.no_grad()
def evaluate_detailed(model: nn.Module, loader: DataLoader, device: str = "cuda", tta_flip: bool = False):"""返回詳細指標并打印:混淆矩陣/各類P/R/F1;掃描閾值優化freeze的F1與Balanced Acc。"""model.eval()all_probs1, all_labels = [], []amp_ctx = torch.amp.autocast(device_type='cuda', dtype=torch.float16, enabled=(device == "cuda"))for x, y in loader:x = x.to(device, non_blocking=True).float()with amp_ctx:logits = _forward_with_tta(model, x, tta_flip)probs = torch.softmax(logits.float(), dim=1)all_probs1.append(probs[:, 1].cpu())all_labels.append(y)p1 = torch.cat(all_probs1).numpy()y_true = torch.cat(all_labels).numpy().astype(int)def metrics_at(th):y_pred = (p1 >= th).astype(int)tp = int(((y_true == 1) & (y_pred == 1)).sum())tn = int(((y_true == 0) & (y_pred == 0)).sum())fp = int(((y_true == 0) & (y_pred == 1)).sum())fn = int(((y_true == 1) & (y_pred == 0)).sum())acc = (tp + tn) / max(1, len(y_true))prec1 = tp / max(1, tp + fp)rec1 = tp / max(1, tp + fn)f1_1 = 2 * prec1 * rec1 / max(1e-12, (prec1 + rec1))prec0 = tn / max(1, tn + fn)rec0 = tn / max(1, tn + fp)f1_0 = 2 * prec0 * rec0 / max(1e-12, (prec0 + rec0))bal_acc = 0.5 * (rec0 + rec1)cm = np.array([[tn, fp],[fn, tp]], dtype=int)return acc, bal_acc, (prec0, rec0, f1_0), (prec1, rec1, f1_1), cm# 0.5 默認與最佳閾值acc50, bal50, cls0_50, cls1_50, cm50 = metrics_at(0.5)best_f1_th, best_f1 = 0.5, -1best_bal_th, best_bal = 0.5, -1for th in np.linspace(0.05, 0.95, 91):acc, bal, _, cls1, _ = metrics_at(th)f1 = cls1[2]if f1 > best_f1:best_f1, best_f1_th = f1, thif bal > best_bal:best_bal, best_bal_th = bal, thprint("== Detailed Validation Metrics ==")print(f"Default th=0.50 | Acc={acc50:.4f} | BalancedAcc={bal50:.4f} | "f"Class0(P/R/F1)={cls0_50[0]:.3f}/{cls0_50[1]:.3f}/{cls0_50[2]:.3f} | "f"Class1(P/R/F1)={cls1_50[0]:.3f}/{cls1_50[1]:.3f}/{cls1_50[2]:.3f}")print(f"Confusion Matrix @0.50 (rows=true [0,1]; cols=pred [0,1]):\n{cm50}")print(f"Best F1(freeze=1) th={best_f1_th:.2f} | F1={best_f1:.4f}")print(f"Best Balanced Acc th={best_bal_th:.2f} | BalancedAcc={best_bal:.4f}")return {"acc@0.5": acc50,"balanced@0.5": bal50,"cm@0.5": cm50,"best_f1_th": best_f1_th,"best_bal_th": best_bal_th,}# --------------------------- 訓練主函數 ---------------------------def main():warnings.filterwarnings("once", category=UserWarning)parser = argparse.ArgumentParser()parser.add_argument("--root", type=str, required=True, help="數據根目錄,包含 train/ val/")parser.add_argument("--epochs", type=int, default=30)parser.add_argument("--freeze_epochs", type=int, default=3, help="線性探測epoch數,僅訓分類頭")parser.add_argument("--batch", type=int, default=8)parser.add_argument("--frames", type=int, default=16)parser.add_argument("--size", type=int, default=224)parser.add_argument("--short_side", type=int, default=256)parser.add_argument("--arch", type=str, default="x3d_m", choices=["x3d_s","x3d_m","r2plus1d_18","r3d_18"])parser.add_argument("--pretrained", type=int, default=1, help="是否使用預訓練權重(1/0)")parser.add_argument("--lr", type=float, default=3e-4)parser.add_argument("--lr_head_mul", type=float, default=10.0, help="分類頭學習率倍率")parser.add_argument("--wd", type=float, default=1e-4)parser.add_argument("--warmup", type=int, default=2, help="warmup的epoch數")parser.add_argument("--clip_grad", type=float, default=1.0, help="梯度裁剪閾值;<=0則關閉")parser.add_argument("--ls", type=float, default=0.05, help="Label smoothing")parser.add_argument("--balance", type=str, default="auto", choices=["off","sampler","class_weight","auto"],help="類別不均衡處理方式")parser.add_argument("--workers", type=int, default=4)parser.add_argument("--seed", type=int, default=42)parser.add_argument("--ckpt", type=str, default="freeze_x3d.pth")parser.add_argument("--device", type=str, default="cuda" if torch.cuda.is_available() else "cpu")# 新增parser.add_argument("--tta_flip", type=int, default=0, help="驗證時水平翻轉TTA")parser.add_argument("--ema", type=int, default=0, help="是否啟用EMA(1/0)")parser.add_argument("--ema_decay", type=float, default=0.999, help="EMA 衰減")args = parser.parse_args()set_seed(args.seed)device = args.deviceprint(f"Device: {device}")print("Enabling TF32 for speed (if Ampere+ GPU).")torch.backends.cuda.matmul.allow_tf32 = Truetorch.backends.cudnn.allow_tf32 = Truetorch.backends.cudnn.benchmark = True# 數據集classes = ("flow", "freeze")train_set = VideoFolderDataset(root=args.root, split="train", classes=classes,frames=args.frames, short_side=args.short_side, crop_size=args.size)val_set = VideoFolderDataset(root=args.root, split="val", classes=classes,frames=args.frames, short_side=args.short_side, crop_size=args.size)print(f"[Data] train={len(train_set)} val={len(val_set)} label_counts(train)={train_set.label_counts}")# 不均衡sampler = Noneclass_weight_tensor = Noneif args.balance in ("sampler", "auto"):counts = np.array(train_set.label_counts, dtype=np.float64) + 1e-6inv_freq = 1.0 / countssample_weights = [inv_freq[y] for _, y in train_set.samples]sampler = WeightedRandomSampler(sample_weights, num_samples=len(sample_weights), replacement=True)if args.balance in ("class_weight",):counts = np.array(train_set.label_counts, dtype=np.float64) + 1e-6class_weight_tensor = torch.tensor((counts.sum() / counts), dtype=torch.float32)train_loader = DataLoader(train_set, batch_size=args.batch, shuffle=(sampler is None), sampler=sampler,num_workers=args.workers, pin_memory=True, drop_last=True,persistent_workers=(args.workers > 0), prefetch_factor=2 if args.workers > 0 else None,)val_loader = DataLoader(val_set, batch_size=max(1, args.batch // 2), shuffle=False,num_workers=max(0, args.workers // 2), pin_memory=True, drop_last=False,persistent_workers=False,)# 模型model = build_model(args.arch, args.frames, args.size, num_classes=2, pretrained=bool(args.pretrained)).to(device)# 線性探測set_backbone_trainable(model, trainable=False, arch=args.arch)head_params = get_head_parameters(model, args.arch)head_ids = {id(p) for p in head_params}backbone_params = [p for p in model.parameters() if p.requires_grad and id(p) not in head_ids]param_groups = [{"params": head_params, "lr": args.lr * args.lr_head_mul}]if backbone_params:param_groups.append({"params": backbone_params, "lr": args.lr})optimizer = torch.optim.AdamW(param_groups, lr=args.lr, weight_decay=args.wd)# Schedulerfrom torch.optim.lr_scheduler import LinearLR, CosineAnnealingLR, SequentialLRwarmup_epochs = max(0, min(args.warmup, args.epochs - 1))sched_main = CosineAnnealingLR(optimizer, T_max=max(1, args.epochs - warmup_epochs))scheduler = SequentialLR(optimizer, [LinearLR(optimizer, start_factor=0.1, total_iters=warmup_epochs),sched_main], milestones=[warmup_epochs]) if warmup_epochs > 0 else sched_main# Losscriterion = nn.CrossEntropyLoss(label_smoothing=args.ls,weight=class_weight_tensor.to(device) if class_weight_tensor is not None else None)# AMP & EMAscaler = torch.amp.GradScaler('cuda', enabled=(device == "cuda"))amp_ctx = torch.amp.autocast(device_type='cuda', dtype=torch.float16, enabled=(device == "cuda"))ema = ModelEMA(model, decay=args.ema_decay) if args.ema else Nonebest_acc = 0.0os.makedirs(os.path.dirname(args.ckpt) if os.path.dirname(args.ckpt) else ".", exist_ok=True)# 訓練for epoch in range(1, args.epochs + 1):model.train()t0 = time.time()running_loss = running_acc = seen = 0if epoch == args.freeze_epochs + 1:print(f"===> Unfreezing backbone for finetuning from epoch {epoch}.")set_backbone_trainable(model, trainable=True, arch=args.arch)head_params = get_head_parameters(model, args.arch)head_ids = {id(p) for p in head_params}backbone_params = [p for p in model.parameters() if p.requires_grad and id(p) not in head_ids]optimizer = torch.optim.AdamW([{"params": head_params, "lr": args.lr * args.lr_head_mul},{"params": backbone_params, "lr": args.lr}],lr=args.lr, weight_decay=args.wd)from torch.optim.lr_scheduler import CosineAnnealingLRscheduler = CosineAnnealingLR(optimizer, T_max=max(1, args.epochs - epoch + 1))for step, (x, y) in enumerate(train_loader, 1):x = x.to(device, non_blocking=True).float()y = y.to(device, non_blocking=True)if step == 1 and epoch == 1:print(f"[Sanity] x.dtype={x.dtype}, param.dtype={next(model.parameters()).dtype}, x.shape={x.shape}")optimizer.zero_grad(set_to_none=True)with amp_ctx:logits = model(x)loss = criterion(logits, y)scaler.scale(loss).backward()if args.clip_grad and args.clip_grad > 0:scaler.unscale_(optimizer)nn.utils.clip_grad_norm_(model.parameters(), max_norm=args.clip_grad)scaler.step(optimizer)scaler.update()if ema:ema.update(model)bs = y.size(0)running_loss += loss.item() * bsrunning_acc += (logits.argmax(dim=1) == y).sum().item()seen += bsif step % 10 == 0 or step == len(train_loader):lr0 = optimizer.param_groups[0]["lr"]print(f"Epoch {epoch}/{args.epochs} | Step {step}/{len(train_loader)} | "f"LR {lr0:.2e} | Loss {(running_loss/seen):.4f} | Acc {(running_acc/seen):.4f}")scheduler.step()train_loss = running_loss / max(1, seen)train_acc = running_acc / max(1, seen)# 驗證(優先用EMA模型)eval_model = ema.ema if ema else modelval_acc, val_loss = evaluate(eval_model, val_loader, device=device, tta_flip=bool(args.tta_flip))dt = time.time() - t0print(f"[Epoch {epoch}] train_loss={train_loss:.4f} acc={train_acc:.4f} | "f"val_loss={val_loss:.4f} acc={val_acc:.4f} | time={dt:.1f}s {'(EMA+TTA)' if ema or args.tta_flip else ''}")if val_acc > best_acc:best_acc = val_accckpt = {"epoch": epoch,"state_dict": eval_model.state_dict(), # 保存 EMA 權重更利于部署"optimizer": optimizer.state_dict(),"scaler": scaler.state_dict(),"best_acc": best_acc,"args": vars(args),"classes": classes,"arch": args.arch,"is_ema": bool(ema)}torch.save(ckpt, args.ckpt)print(f"? Saved best checkpoint to {args.ckpt} (acc={best_acc:.4f})")print(f"Training done. Best val acc = {best_acc:.4f}")# 結束時輸出詳細指標(基于 EMA+TTA 的模型)eval_model = ema.ema if ema else modelevaluate_detailed(eval_model, val_loader, device=device, tta_flip=bool(args.tta_flip))if __name__ == "__main__":try:main()except KeyboardInterrupt:sys.exit(1)啟動命令:
python3 train_freeze.py --root /path/to/dataset --epochs 30 --freeze_epochs 3 \--arch x3d_m --pretrained 1 --batch 8 --frames 32 --size 224 --short_side 256 \--lr 3e-4 --lr_head_mul 10 --wd 1e-4 --warmup 2 \--balance auto --ls 0.05 --clip_grad 1.0 --workers 8 \--tta_flip 1 --ema 1 --ema_decay 0.999關鍵參數解釋
| 參數 | 典型值 | 作用 |
|---|---|---|
|
| 16/32 | 控制時間感受野大小 |
|
| 256 | 保持長寬比的縮放基準 |
|
| 10 | 分類頭學習率是主干的10倍 |
|
| 0.999 | 模型權重指數移動平均系數 |
推理代碼
import os
import sys
import argparse
from pathlib import Path
from typing import List, Tuple, Dict, Anyimport numpy as np
import torch
import torch.nn as nn
from torchvision.io import read_video
from torchvision.transforms import functional as TF# --------------------- 小工具 ---------------------def list_videos(root: Path, exts=(".mp4", ".avi", ".mov", ".mkv")) -> List[Path]:files = []for ext in exts:files += list(root.rglob(f"*{ext}"))return sorted(files)def uniform_indices(total: int, num: int) -> np.ndarray:if total <= 0:return np.zeros((num,), dtype=np.int64)if total >= num:idx = np.linspace(0, total - 1, num=num)return np.round(idx).astype(np.int64)else:base = list(range(total))base += [total - 1] * (num - total)return np.array(base, dtype=np.int64)def segment_indices(total: int, num_frames: int, clip_idx: int, num_clips: int) -> np.ndarray:if num_clips <= 1:return uniform_indices(total, num_frames)start = int(np.floor(clip_idx * total / num_clips))end = int(np.floor((clip_idx + 1) * total / num_clips)) - 1end = max(start, end)seg_len = end - start + 1if seg_len >= num_frames:idx = np.linspace(start, end, num=num_frames)return np.round(idx).astype(np.int64)else:idx = list(range(start, end + 1))idx += [end] * (num_frames - seg_len)return np.array(idx, dtype=np.int64)MEAN = torch.tensor((0.45, 0.45, 0.45)).view(3,1,1,1)
STD = torch.tensor((0.225, 0.225, 0.225)).view(3,1,1,1)# --------------------- 模型構建(離線優先) ---------------------def build_x3d_offline(variant: str, num_classes: int, pretrained: bool = False, repo_dir: str = "") -> nn.Module:"""優先走 pytorchvideo 本地 Python API(無需聯網);失敗則從本地 hub 緩存目錄加載(source='local'),也不會聯網。"""variant = variant.lower()assert variant in {"x3d_s", "x3d_m"}# 1) 直接用 pytorchvideo 的 Python API(無需 torch.hub、可離線)try:from pytorchvideo.models import hub as pv_hubbuilder = getattr(pv_hub, variant) # x3d_s / x3d_mmodel = builder(pretrained=pretrained)# 替換頭if hasattr(model.blocks[-1], "proj") and isinstance(model.blocks[-1].proj, nn.Linear):in_feats = model.blocks[-1].proj.in_featuresmodel.blocks[-1].proj = nn.Linear(in_feats, num_classes)else:# 兜底:遍歷最后一塊的線性層head = model.blocks[-1]proj = Nonefor _, m in head.named_modules():if isinstance(m, nn.Linear):proj = m; breakif proj is None:raise RuntimeError("未找到X3D分類頭線性層。")in_feats = proj.in_featuresmodel.blocks[-1].proj = nn.Linear(in_feats, num_classes)return modelexcept Exception as e_api:print(f"[Info] pytorchvideo.models.hub 離線構建失敗,嘗試本地 hub 緩存加載。原因: {e_api}")# 2) 使用 torch.hub 的本地緩存(不聯網)try:if not repo_dir:repo_dir = os.path.join(torch.hub.get_dir(), "facebookresearch_pytorchvideo_main")if not os.path.isdir(repo_dir):raise FileNotFoundError(f"本地 hub 緩存不存在:{repo_dir}")# 關鍵:source='local' 可確保不聯網;trust_repo=True 跳過校驗model = torch.hub.load(repo_dir, variant, pretrained=pretrained, source='local', trust_repo=True)# 替換頭if hasattr(model.blocks[-1], "proj") and isinstance(model.blocks[-1].proj, nn.Linear):in_feats = model.blocks[-1].proj.in_featuresmodel.blocks[-1].proj = nn.Linear(in_feats, num_classes)else:head = model.blocks[-1]proj = Nonefor _, m in head.named_modules():if isinstance(m, nn.Linear):proj = m; breakif proj is None:raise RuntimeError("未找到X3D分類頭線性層。")in_feats = proj.in_featuresmodel.blocks[-1].proj = nn.Linear(in_feats, num_classes)return modelexcept Exception as e_local:raise RuntimeError("無法離線構建 X3D 模型。請確保已安裝 pytorchvideo 或本地已有 hub 緩存。\n"f"- pip 安裝:pip install pytorchvideo\n"f"- 本地緩存目錄(示例):{os.path.join(torch.hub.get_dir(), 'facebookresearch_pytorchvideo_main')}\n"f"原始錯誤:{e_local}")def build_model(arch: str, num_classes: int, pretrained: bool = False, repo_dir: str = "") -> nn.Module:arch = arch.lower()if arch in {"x3d_s", "x3d_m"}:return build_x3d_offline(arch, num_classes=num_classes, pretrained=pretrained, repo_dir=repo_dir)elif arch in {"r2plus1d_18", "r3d_18"}:from torchvision.models.video import r2plus1d_18, r3d_18# 預訓練與否不重要,稍后會 load_state_dictm = r2plus1d_18(weights=None) if arch == "r2plus1d_18" else r3d_18(weights=None)in_feats = m.fc.in_featuresm.fc = nn.Linear(in_feats, num_classes)return melse:raise ValueError(f"未知 arch: {arch}")def load_ckpt_build_model(ckpt_path: str, device: str = "cuda", override: Dict[str, Any] = None, repo_dir: str = ""):# 顯式 weights_only=False,避免未來默認變更帶來的困惑ckpt = torch.load(ckpt_path, map_location="cpu", weights_only=False)args = ckpt.get("args", {}) or {}arch = (override or {}).get("arch", args.get("arch", "x3d_m"))classes = ckpt.get("classes", ("flow","freeze"))num_classes = len(classes)model = build_model(arch, num_classes=num_classes, pretrained=False, repo_dir=repo_dir)missing, unexpected = model.load_state_dict(ckpt["state_dict"], strict=False)if missing or unexpected:print(f"[load_state_dict] missing={missing} unexpected={unexpected}")model.to(device).eval()meta = {"arch": arch,"classes": classes,"frames": int((override or {}).get("frames", args.get("frames", 16))),"size": int((override or {}).get("size", args.get("size", 224))),"short_side": int((override or {}).get("short_side", args.get("short_side", 256))),}return model, meta# --------------------- 預處理 & 前向 ---------------------@torch.no_grad()
def preprocess_clip(vframes: torch.Tensor, frames: int, short_side: int, crop_size: int, idxs: np.ndarray) -> torch.Tensor:clip = vframes[idxs] # (frames,C,H,W)if clip.shape[1] == 1:clip = clip.repeat(1,3,1,1)clip = TF.resize(clip, short_side, antialias=True)clip = TF.center_crop(clip, [crop_size, crop_size])clip = clip.permute(1,0,2,3).contiguous().float() / 255.0 # (C,T,H,W)clip = (clip - MEAN) / STDreturn clip.unsqueeze(0) # (1,3,T,H,W)@torch.no_grad()
def _forward_with_tta(model: nn.Module, x: torch.Tensor, tta_flip: bool):logits = model(x)if tta_flip:logits = (logits + model(torch.flip(x, dims=[-1]))) / 2.0return logits@torch.no_grad()
def infer_one_video(model: nn.Module, path: Path, frames: int, short_side: int, crop_size: int,num_clips: int = 1, tta_flip: bool = False, device: str = "cuda") -> Tuple[int, np.ndarray]:vframes, _, _ = read_video(str(path), pts_unit="sec", output_format="TCHW")if vframes.numel() == 0:raise RuntimeError(f"Empty video: {path}")if vframes.shape[1] == 1:vframes = vframes.repeat(1, 3, 1, 1)T = vframes.shape[0]logits_sum = torch.zeros((1, 2), dtype=torch.float32, device=device)amp_ctx = torch.amp.autocast(device_type='cuda', dtype=torch.float16, enabled=(device == "cuda"))for ci in range(max(1, num_clips)):idxs = segment_indices(T, frames, ci, num_clips)x = preprocess_clip(vframes, frames, short_side, crop_size, idxs).to(device, non_blocking=True)with amp_ctx:logits = _forward_with_tta(model, x, tta_flip)logits_sum += logits.float()probs = torch.softmax(logits_sum / max(1, num_clips), dim=1).squeeze(0).cpu().numpy()pred = int(np.argmax(probs))return pred, probs# --------------------- 主流程 ---------------------def main():parser = argparse.ArgumentParser()parser.add_argument("--ckpt", type=str, required=True, help="訓練保存的 .pth")parser.add_argument("--input", type=str, required=True, help="視頻文件或目錄")parser.add_argument("--out", type=str, default="", help="可選:輸出 CSV 路徑")parser.add_argument("--threshold", type=float, default=0.5, help="freeze(=1) 閾值")parser.add_argument("--clips", type=int, default=1, help="多時間片數(Temporal TTA)")parser.add_argument("--tta_flip", type=int, default=0, help="水平翻轉 TTA (0/1)")parser.add_argument("--device", type=str, default="cuda" if torch.cuda.is_available() else "cpu")parser.add_argument("--frames", type=int, default=None, help="覆蓋 ckpt 的 frames(可選)")parser.add_argument("--size", type=int, default=None, help="覆蓋 ckpt 的 crop size(可選)")parser.add_argument("--short_side", type=int, default=None, help="覆蓋 ckpt 的 short_side(可選)")parser.add_argument("--arch", type=str, default=None, help="覆蓋 arch(可選)")parser.add_argument("--repo_dir", type=str, default="", help="pytorchvideo 本地 hub 緩存目錄(可選)")args = parser.parse_args()if args.device.startswith("cuda"):torch.backends.cuda.matmul.allow_tf32 = Truetorch.backends.cudnn.allow_tf32 = Truetorch.backends.cudnn.benchmark = Trueoverride = {}if args.arch: override["arch"] = args.archif args.frames is not None: override["frames"] = args.framesif args.size is not None: override["size"] = args.sizeif args.short_side is not None: override["short_side"] = args.short_sidemodel, meta = load_ckpt_build_model(args.ckpt, device=args.device, override=override, repo_dir=args.repo_dir)classes = list(meta["classes"])frames = int(meta["frames"])crop = int(meta["size"])short_side = int(meta["short_side"])print(f"[Model] arch={meta['arch']} classes={classes}")print(f"[Preprocess] frames={frames} size={crop} short_side={short_side}")print(f"[TTA] clips={args.clips} flip={bool(args.tta_flip)} threshold={args.threshold:.2f}")inp = Path(args.input)paths: List[Path]if inp.is_dir():paths = list_videos(inp)if not paths:print(f"No videos found in {inp}")sys.exit(1)else:if not inp.exists():print(f"File not found: {inp}")sys.exit(1)paths = [inp]rows = []for p in paths:try:pred, probs = infer_one_video(model, p, frames, short_side, crop,num_clips=args.clips, tta_flip=bool(args.tta_flip), device=args.device)label = classes[pred] if pred < len(classes) else str(pred)prob_freeze = float(probs[1]) if len(probs) > 1 else float('nan')is_freeze = int(prob_freeze >= args.threshold)print(f"{p.name:40s} -> pred={label:6s} probs(flow,freeze)={probs} freeze@{args.threshold:.2f}={is_freeze}")rows.append((str(p), label, probs[0], probs[1] if len(probs)>1 else float('nan'), is_freeze))except Exception as e:print(f"[Error] {p}: {e}")rows.append((str(p), "ERROR", float('nan'), float('nan'), -1))if args.out:import csvwith open(args.out, "w", newline="") as f:writer = csv.writer(f)writer.writerow(["path", "pred_label", "prob_flow", "prob_freeze", f"freeze@{args.threshold}"])writer.writerows(rows)print(f"Saved results to {args.out}")if __name__ == "__main__":main()啟動命令
python3 inference_freeze.py --ckpt ./freeze_x3d.pth --input /path/to/video_or_dir \--clips 3 --tta_flip 1關鍵參數解釋
python3 inference_freeze.py \--ckpt ./freeze_x3d.pth \ # 模型權重文件路徑--input /path/to/video_or_dir \ # 輸入視頻文件或目錄--clips 3 \ # 時間片段采樣數--tta_flip 1 # 水平翻轉增強開關?
?




![week3-[分支嵌套]方陣](http://pic.xiahunao.cn/week3-[分支嵌套]方陣)


)
、LSTM 與 GRU (一))






)

)

