背景
BEV感知能夠聚合多個傳感器輸入得到統一的空間表征,在3D感知、下游應用以及跨模態融合中發揮重要作用。現有的BEV感知分為2D反投影(LSS)以及3D投影(BEVFormer),其中3D投影依賴于3D體素的投影,這導致BEV網格分辨率不能太大,否則計算代價高。本文提出了基于2D反向投影方法,在準確度與計算效率間取得平衡并滿足實時性要求。
相關工作
投影方法
對于3D投影來說,相比于2D反投影它是計算密集型的,對網格分辨率有較高要求,限制了在現實場景下的可擴展性。
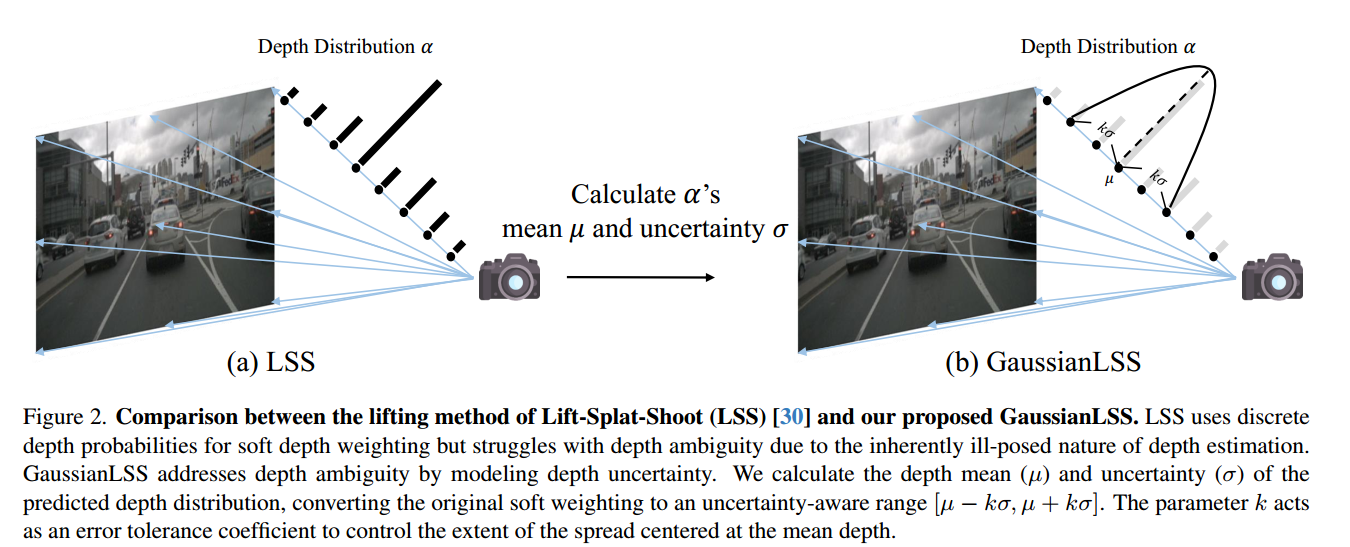
對于2D反投影來說,LSS提出將2D特征抬升到3D空間中,但他依賴于準確的深度估計,深度估計錯會傳播到BEV表征中,因此后續的BEVStereo、BEVDepth都引入了深度損失作為輔助損失。雖然它們使用了概率深度估計來soft的抬升特征,但是還是缺乏顯式的深度不確定性的表示,在復雜場景下很難處理深度模糊性的問題。GaussianLSS通過計算概率深度分布的方差來建模深度不確定性,從而降低了對于準確深度的依賴轉為捕獲圍繞均值深度的空間范圍。
不確定性建模
不確定性建模就是在建模或預測時不是給出一個準確的值,而是給出預測結果+結果的信心程度。評估不確定性的方法包含以下幾種:
- 預測分布的方差。計算概率分布的方差,從而在輸出中提供直接反映信心程度的信息。
- 基于MLP的不確定評估。它是通過多層的MLP網絡得到一個不確定性分數,又或者是輸出一個分布的參數u與σ,其中σ作為方差衡量不確定性。
- 貝葉斯網絡。使用分布的先驗建模不確定性。
在這篇論文中,則是通過分布的方差來建模不確定性從而提升BEV表征,尤其是在深度模糊的情況下。
主要工作
深度不確定性建模
LSS的主要問題:1、離散深度導致稀疏BEV,空間覆蓋率低。2、不穩定的深度分布,softmax得到的深度概率即使兩個bin靠近也可能大不相同,從而導致BEV特征不一致,這是由于softmax會是大的更大,小的更小,深度值輕微的不同可能導致不成比例的深度關注度。
本文是在預測的深度分布的基礎上計算它的均值與方差,使用錯誤容忍因子得到[u-kσ,u+kσ]的范圍,這個范圍考慮了深度不確定性,實現更靈活可靠的深度投影。
3D不確定性變換
對得到的深度范圍點,通過內外參轉換到自車坐標系下,計算出每個像素對應的均值與協方差,公式如下:
μ3d=∑i=0B?1Pi(p)?pi3d \mu _{3d} = \sum _{i=0}^{B-1} P_i(p) \, p^{3d}_i μ3d?=i=0∑B?1?Pi?(p)pi3d?
Σ=∑i=0B?1Pi(p)?(pi3d?μ3d)(pi3d?μ3d)T \Sigma = \sum_{i=0}^{B-1} P_i(p) \, (p^{3d}_i - \mu_{3d})(p^{3d}_i - \mu_{3d})^TΣ=i=0∑B?1?Pi?(p)(pi3d??μ3d?)(pi3d??μ3d?)T
使用馬氏距離定義置信范圍,利用了上面使用過的錯誤容忍系數,公式如下:
(x?μ3d)TΣ?1(x?μ3d)≤k2(x - \mu_{3d})^T \Sigma^{-1} (x - \mu_{3d}) \leq k^2(x?μ3d?)TΣ?1(x?μ3d?)≤k2
BEV Features Splatting
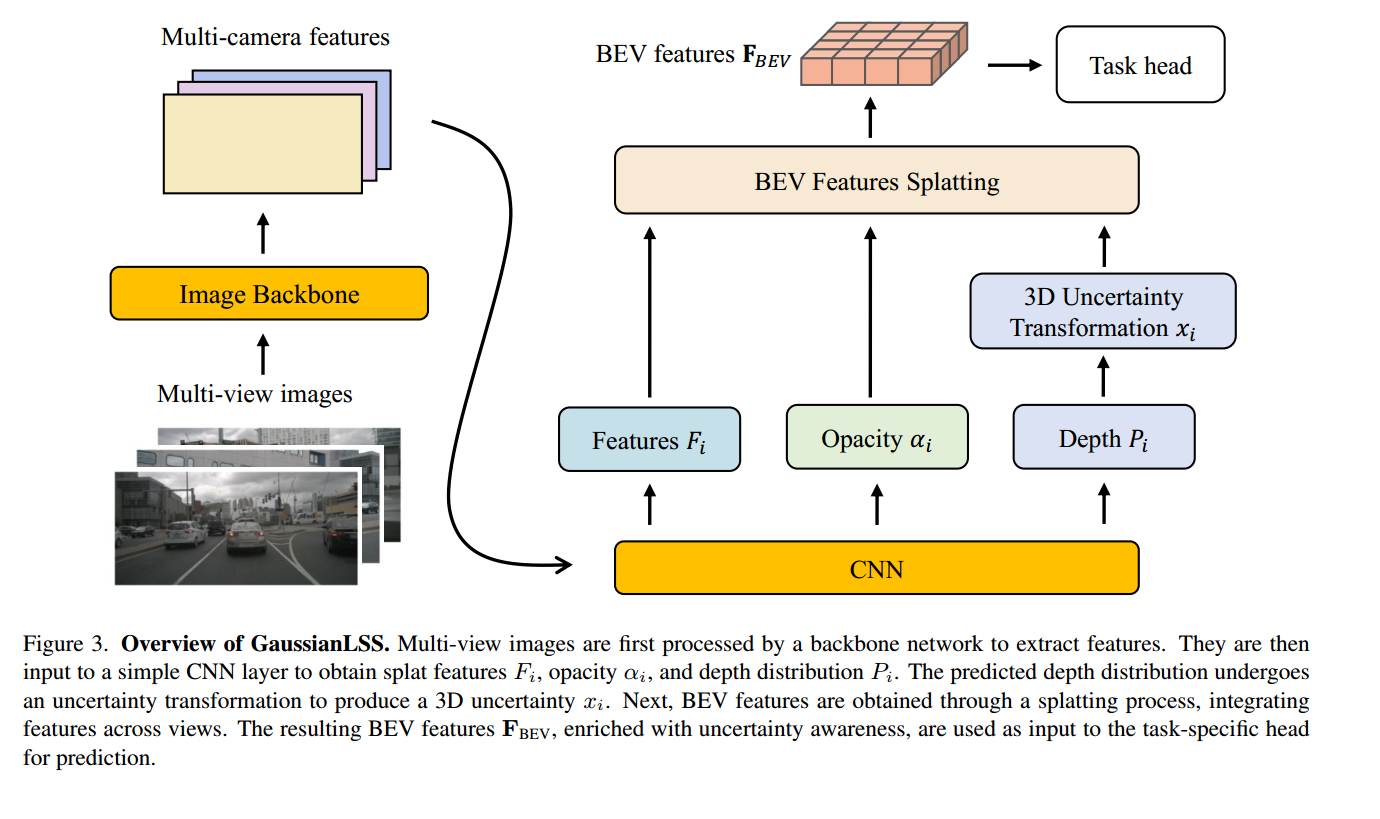
對于提取的特征分別輸出context,opacity與depth,其中depth通過3D不確定性變換得到兩個參數作為后續的輸入,利用Gaussian Splatting投射到BEV視角。
FBEV(x)=∑i∈GBEVFiαiexp?(?12(x?μi)?Σi?1(x?μi))F_{BEV}(x) = \sum_{i \in G_{BEV}} F_i \alpha_i \exp\left(-\frac{1}{2} (x - \mu_i)^\top \Sigma_i^{-1} (x - \mu_i)\right)FBEV?(x)=i∈GBEV?∑?Fi?αi?exp(?21?(x?μi?)?Σi?1?(x?μi?))
此外考慮到相鄰像素深度上的差異性,使用了多尺度BEV進行處理,最后進行上采樣。
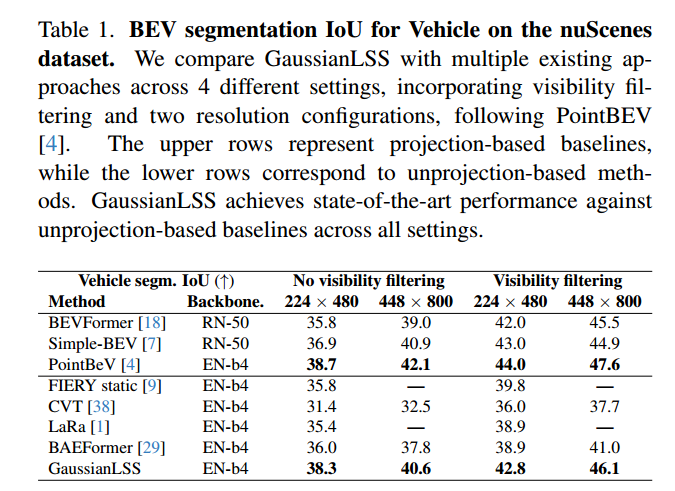
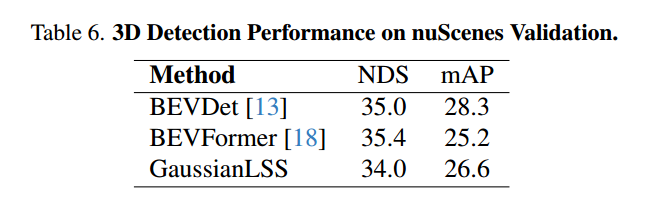
實驗結果
總結
GaussianLSS通過創新性地結合深度不確定性建模與高效的多尺度BEV特征渲染,成功解決了深度模糊性的固有挑戰。這種方法不僅在基于反投影的方法中實現了最先進的性能,還在降低計算資源需求方面表現出色,使其特別適合自動駕駛的實時應用場景。
GaussianLSS的成功證明了顯式不確定性建模在提升空間感知任務性能中的價值,為未來BEV感知系統的發展提供了新的研究方向。

)




)





上部署Oracle 11g、19C RAC詳細圖文教程)


)
![6-7 TIM編碼器接口 [江科協STM32]](http://pic.xiahunao.cn/6-7 TIM編碼器接口 [江科協STM32])


)