文章目錄
- 1. PX4飛控PID簡介
- 1.1 位置控制器
- 1.2 速度控制器
- 1.3 加速度和yaw轉到姿態
- 1.4 姿態控制器
- 1.5 角速率控制器
- 2. 線性二次型優化(LQR)控制
- 3. 模型預測控制MPC/NMPC
- 3.1 MPC
- 3.2 NMPC
1. PX4飛控PID簡介
相關鏈接:PX4官方中文文檔、PID概念(不了解PID的可以看看這個或者翻自控書吧)
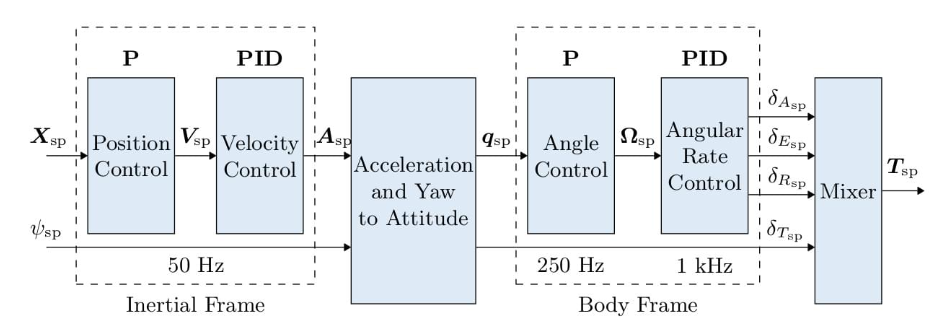
PX4使用了串級PID控制器,串級PID通過分而治之的策略,將復雜控制問題分解為多個簡單子問題,在響應速度、抗干擾性、穩定性和工程實現上均優于單級PID。比如姿態環處理的IMU噪聲不會影響到位置環,同時各環PID參數可獨立調諧,內環保證局部穩定(如機體角速率收斂),外環在此基礎上優化全局性能。避免單級PID因參數耦合導致的振蕩或發散。
1.1 位置控制器
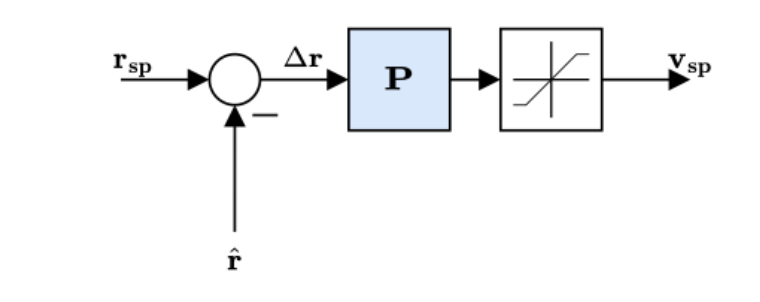
在位置外環中只使用了一個P控制器和一個限幅函數。使用當前的位置估計和期望位置相減得到誤差,然后經過P控制器和限幅得到期望速度,輸出到速度內環。
為什么外環只需要一個P控制環呢?
那是因為外環的核心任務是“設定目標”,而非快速跟蹤。核心任務是將位置誤差線性轉化為速度指令,無需積分或微分,速度內環的PID會補償外環的不足,避免振蕩和噪聲放大。若外環加入I或D控制,積分會導致超調或延遲,微分會放大噪聲,反而破壞系統穩定性,因此簡化外環、強化內環是最優策略。
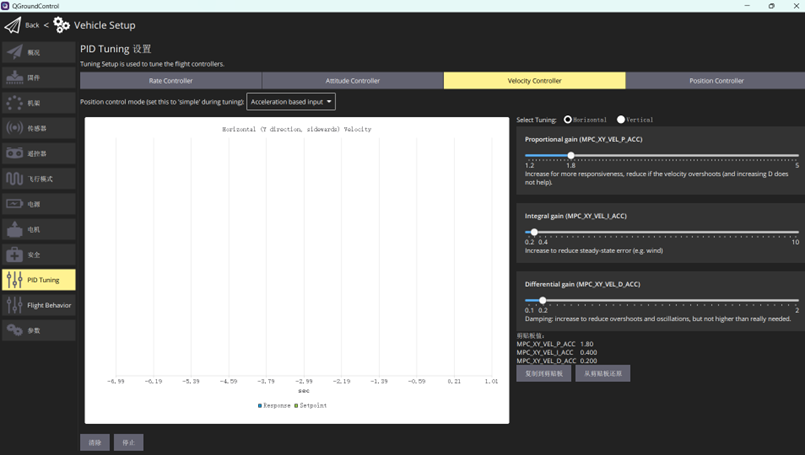
1.2 速度控制器
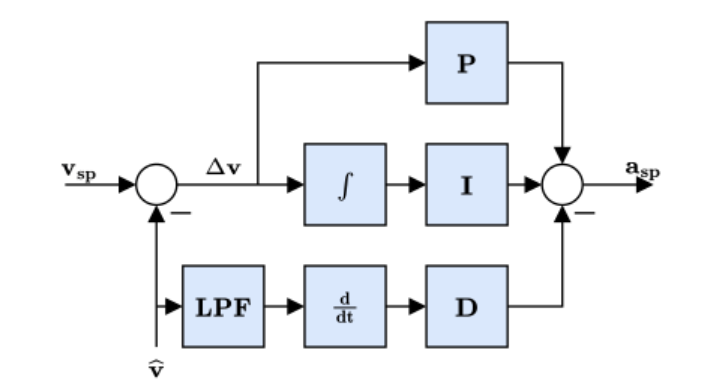
速度內環控制器就熟悉一點,PID大套餐上齊了。首先估計速度直接進入LPF(低通濾波器,防止高頻干擾微分結果)然后計算微分,進入D環節,這一部分是防止輸出突變以及提前控制防止震蕩,其實也不難理解,就是對當前的估計做了微分反映了數據的運動趨勢;然后估計速度與期望速度作差得到誤差進入積分環節,這部分是**消除穩態誤差(如抵抗恒定風阻導致的速度偏差),其實就是識別到誤差長時間沒有歸零就加大矯正力度;最后是誤差進入P環節快速響應速度誤差**。
為什么內環使用PID控制器?速度內環用PID控制,因為它需要快速精準地跟蹤速度指令,比例項響應誤差,積分項消除靜差,微分項抑制擾動,確保內環動態性能足夠支撐外環。
總結:外環P控制像“指揮官”設定宏觀目標,內環PID像“執行者”處理細節,二者分工明確,避免單級PID的復雜性和不穩定性。
1.3 加速度和yaw轉到姿態
由于無人機的yaw和速度加速度在動力學上天然解耦,yaw角在規劃器中是可以單獨規劃的,不過常見規劃器還是按照軌跡的切向方向來的。圖中的yaw角也是直接從規劃器來的,而不是像pitch、roll需要從加速度中提取。
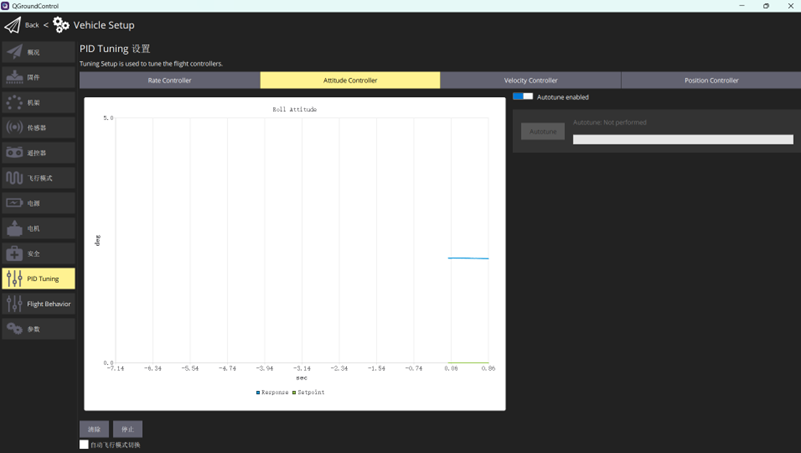
1.4 姿態控制器
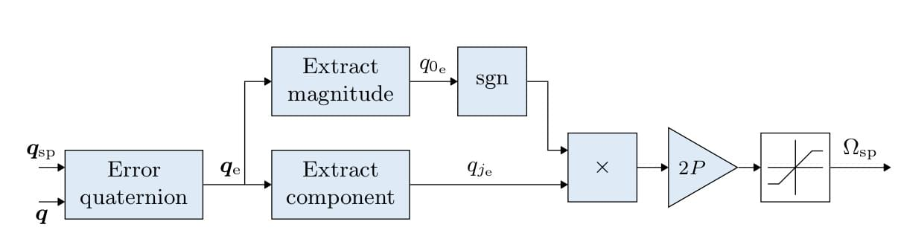
多旋翼姿態控制器基于四元數(quaternion)設計,通過誤差四元數計算期望角速率,最終輸出飽和的角速率命令。
1.誤差計算(通過四元數乘法實現):
四元數乘法如下(實部虛部分開):

這里分為兩路,提取了實部的符號乘以虛部保證最短旋轉路徑(具體可以參考四元數的幾何表示,q和-q表示一樣的終端狀態,但是旋轉方向有大小區別,q可以保證旋轉最短角度):
2.P控制器構造
角速度 Ω 的本質是旋轉偏差隨時間的變化率。在控制系統中,我們希望角速度命令與姿態誤差成比例關系,即**角速度的方向應對準旋轉軸,大小應與旋轉角度偏差成正比**。
觀察四元數的幾何表示:

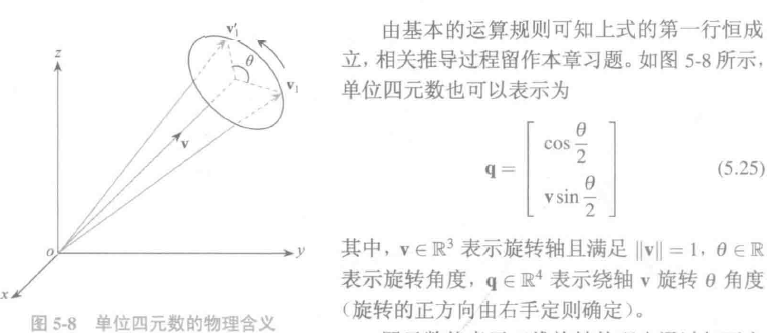
可以看到w是影響旋轉角度大小,虛部影響旋轉軸方向還有旋轉角度大小。當誤差特別小時,可以使用小角度假設,此時的虛部等于1/2θn,那么根據前面的構造,可以進一步構造一個有物理意義的P系數即2P。
這個時候P的物理意義是姿態誤差每增加一弧度,角速度增加P弧度每秒。最后再限幅保證安全。
這里為什么選擇四元數而不選擇歐拉角呢?
主要有下列幾點原因:1.歐拉角有萬向節死鎖問題。2.四元數是線性計算,歐拉角是三角函數計算,更加復雜。3.通過四元數插值(如SLERP)可平滑過渡姿態,且誤差四元數的實部符號能自動選擇最短旋轉路徑。
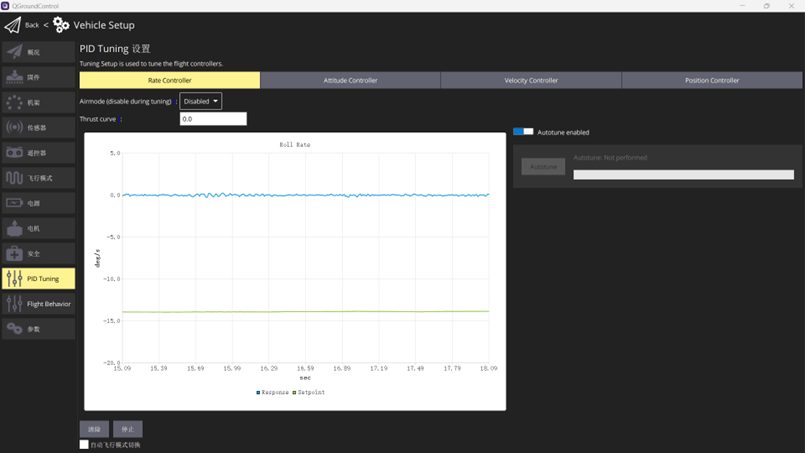
這一環可以自動調參:自動調參,但是感覺對大軸距的飛機效果不好。
1.5 角速率控制器
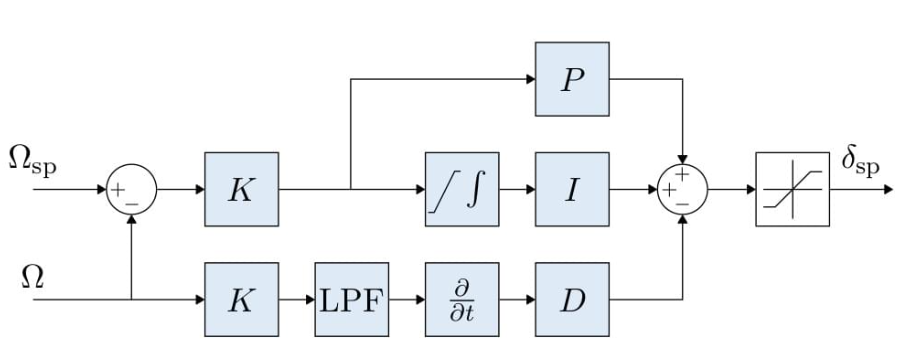
K-PID:比例項(K)獨立于積分(I)和微分(D)路徑,直接作用于誤差信號。無人機需要快速響應姿態誤差(比例項K直接作用),同時通過積分消除穩態誤差(如風力干擾),微分抑制振蕩。
這一環可以自動調參:自動調參,但是感覺對大軸距的飛機效果不好。
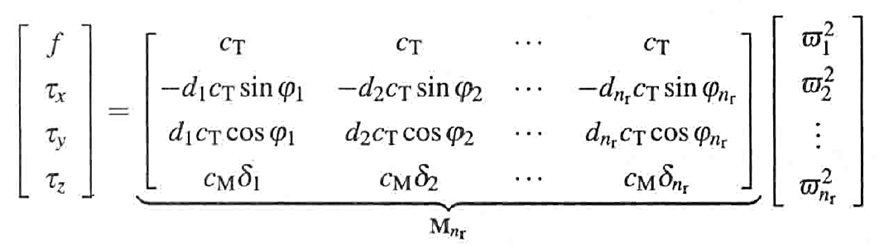
計算完期望的體速率和推力之后,使用旋翼的模型計算每個電機的轉速:
由電機轉速得到力矩和推力公式:
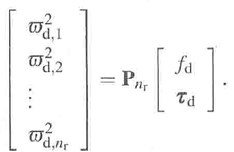
對上式求逆得到每個電機轉速:
2. 線性二次型優化(LQR)控制
無人機的底層控制算法中,LQR(Linear Quadratic Regulator,線性二次調節器)是一種基于狀態空間模型的優化控制方法,廣泛應用于姿態、位置等底層控制環節。LQR是一種最優控制算法,通過最小化一個“代價函數”來求解最優控制輸入。其核心思想是:
- 線性系統:無人機動力學模型在平衡點附近可線性化(如懸停狀態附近)。
- 二次代價函數:平衡狀態誤差和控制輸入的能耗,實現“高性能+低能耗”的折中。
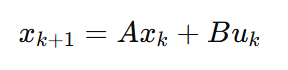
由于限制為一個線性系統,所以這個狀態方程就不會太復雜,以無人機懸停為例。
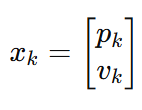
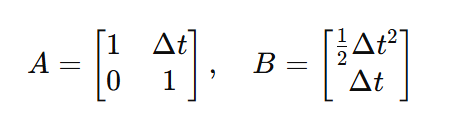
無人機的狀態方程(此時當做質點):
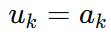
設x為無人機的位置、速度,A為無人機的狀態轉移矩陣,B為輸入矩陣(描述控制輸入對狀態的影響),u為無人機的輸入,這里應該是加速度。
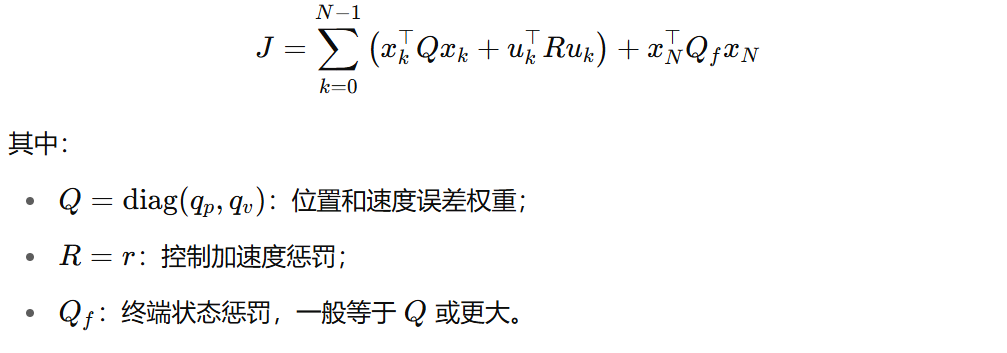
代價函數為:
最小化跟蹤誤差以及輸入加速度(節省能量)。Q:增大對角元素會強制對應狀態快速收斂。R:增大對角元素會限制控制輸入的幅值。
這個目標函數是一個標準的二次型優化問題(可以類比于二次函數),是有解析解的。下面是推導過程:
1.先構建一個關于狀態向量的值函數(其中P 是對稱正定矩陣,需要求解):
2.帶入HJB方程(哈密頓-雅各比-貝爾曼方程)
這個方程表達了 從當前狀態出發,若采取最優控制策略,所能達到的最小代價應滿足某種微分方程。

再把值函數帶入得到:

然后對這個HJB方程對輸入u求導:

得到
再構造一個反饋增益矩陣K:

再將結果帶入HJB方程得到:

最終求得


**總結:**LQR通過數學模型和優化理論,為無人機提供了一種高效、穩定的底層控制方案。其核心是狀態反饋和代價函數最小化,適合需要精確建模和性能優化的場景。
3. 模型預測控制MPC/NMPC
MPC(Model Predictive Control,模型預測控制)是現代控制中非常重要的一個方法,特別適用于多變量系統、有約束系統或需要提前規劃行為的場景,比如無人車路徑跟蹤、無人機避障、工業過程控制等。MPC 是一種滾動優化控制策略。它的基本思想是:
- 使用系統模型預測未來狀態變化(例如未來幾秒或幾個采樣周期);
- 基于預測結果最小化一個代價函數(類似 LQR 的目標函數);
- 求解一個有限時域的優化問題,得到一組未來控制序列;
- 只執行第一個控制輸入,然后重新預測、重新優化,循環進行。
這就是 MPC 的“預測-優化-執行-滾動”機制。
如果系統方程是線性的就是MPC,如果非線性就是NMPC。
3.1 MPC
還是以無人機懸停為例,且暫時考慮一維模型,狀態變量:
控制輸入為加速度:
系統模型(離散)為:
代價函數為:
求解過程:
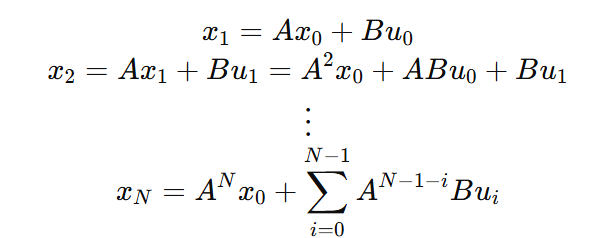
1.預測:
給定當前狀態𝑥0,可以展開出整個時域的狀態預測:
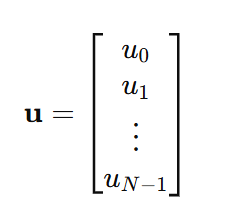
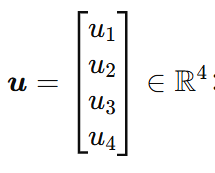
定義控制向量:
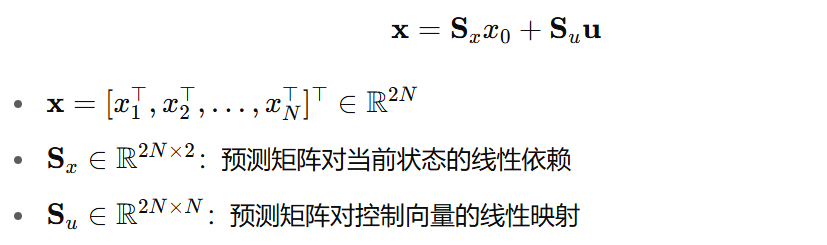
將整個狀態預測寫成矩陣形式:
2.優化求解
將預測狀態代入代價函數:

代入狀態展開:

展開為標準形式:
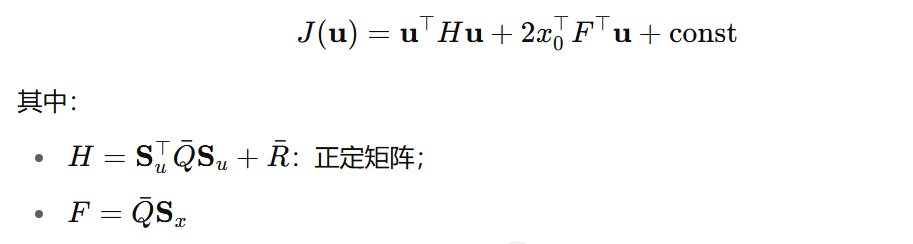
同時考慮一些必要的硬件約束,調用優化庫進行求解得到數值解。
3.執行
執行求解后的u_0,即控制向量的第一個元素。
總流程
每個控制周期:
- 讀取當前狀態𝑥0建預測矩陣 𝑆𝑥,𝑆𝑢 構造代價函數和約束
- 解二次規劃問題,得到控制向量 𝑢?
- 僅執行第一個控制輸入 𝑢_0?
- 系統前進一步,滾動窗口,重復上述步驟
3.2 NMPC
仍然是無人機懸停為例,使用NMPC直接控制無人機的電機轉速。
狀態變量(12維):

控制變量(4維):
系統模型:
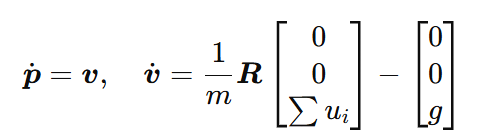

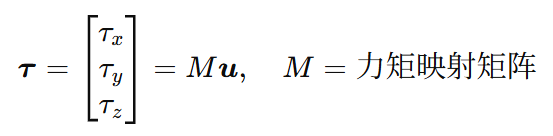
這個M就是1.5節的M矩陣。
代價函數:
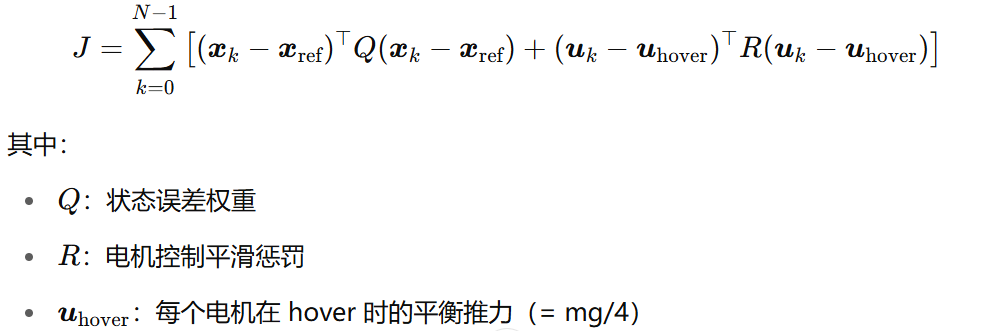
然后再寫出擴展過的系統模型,帶入代價函數進行優化求解。
**總結:**LQR就是MPC無約束、無時域限制的特殊形式,而且由于形式簡單,可以準確計算解析解,計算快、準。

)





詳解)




)



![[ java 基礎 ] 了解編程語言的第一步](http://pic.xiahunao.cn/[ java 基礎 ] 了解編程語言的第一步)


