文章目錄
- 一、/dev/videoX
- 1. 查詢設備能力
- 2. 獲取當前視頻格式
- 3. 設置視頻格式
- 4. 申請緩沖區
- 1) mmap 方式
- 2) user 分配
- 5. 查詢緩沖區信息
- 6. 將緩沖區放入隊
- 1) fill_vb2_buffer
- 2) buf_prepare
- 3) get_userptr
- 4) buf_init
- 5) attach_dmabuf 和 map_dmabuf
- 6) start_streaming
- 7) 總結
- 7. 啟動視頻流
- 1) buf_queue
- 2) vidioc_streamon
- 3. vb2_buffer_done
- 8. 從隊列中取出緩沖
- 9. mmap 映射內存
- 10. 停止視頻流
- 11. 總結
- 二、實現一個虛擬攝像頭
- 1. 最簡單的虛擬攝像頭
- 2. 支持查詢設備能力
- 3. 支持申請 buffer 的能力
- 4. 支持查詢緩沖區信息
- 5. 支持 mmap 功能
- 6. 支持將隊列放入緩沖區
- 7. 添加啟動視頻流功能
- 8. 從隊列中取出緩沖
- 三、/dev/subdevX
- 1. subdev 的接口
- 2. 實現簡單的 subdev 驅動
- 1) 注冊三個 subdev
- 2) 注冊 isp 對應的 video
- 四、media controller
- 1. media controller 的核心組件
- 1) media_device
- 2) entity 組件
- 3) pad 組件
- 4) media_link 組件
- 2. 添加 media controller
- 1) 給 isp 添加 media entity
- 2) 給 subdev 添加 media entity
- 3) 應用程序
- 4) 驗證結果
- 五、設備樹 ports 方法
- 1. 常見接口
- 1) fwnode_graph_get_port_parent
- 2) fwnode_graph_get_remote_endpoint
- 3) fwnode_graph_parse_endpoint
- 4) fwnode_graph_get_remote_port
- 5) fwnode_graph_get_port_parent
- 2. 編程驗證
- 1) 設備 A 的驗證程序
- 2) 設備 B 的驗證程序
- 3. 總結
作者: baron
博客: baron-z.cn
????V4L2(Video for Linux 2) 是 Linux 操作系統中的視頻驅動框架, 它為視頻設備提供了統一的處理接口. 本文基于內核版本 Linux 4.4.94+ 分析 linux 視頻驅動框架. 它包括以下內容.
- /dev/videoX 視頻流處理框架
- /dev/v4l-subdevX 的子設備框架
- Media Controller 框架
- 設備樹 ports 方法
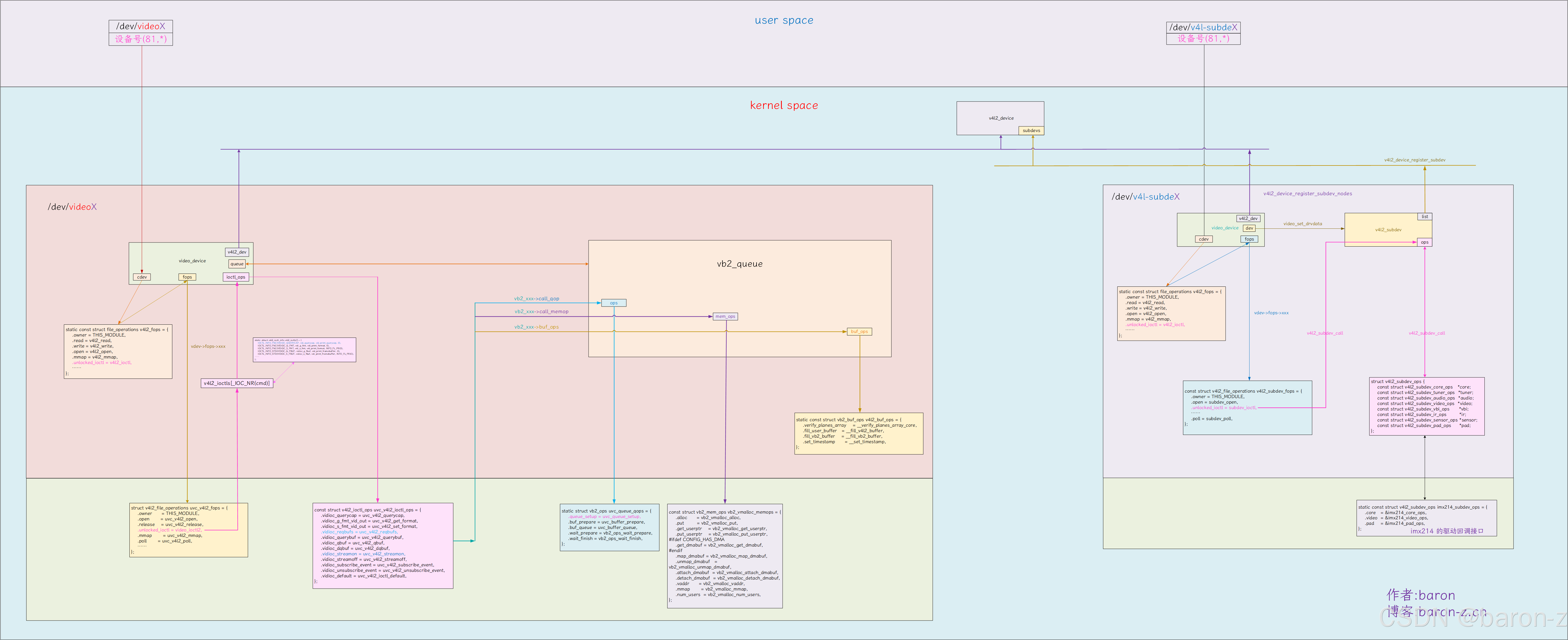
????/dev/videoX 節點對應的設備后續會稱為 video 設備和 video 框架. /dev/v4l-subdevX 節點對應的設備則稱為 subdev 設備和 subdev 框架. 無論是 video 設備還是 subdev 設備, 都是通過 v4l2_device 進行統一管理. video 設備和 subdev 設備 的整體框架如下所示.
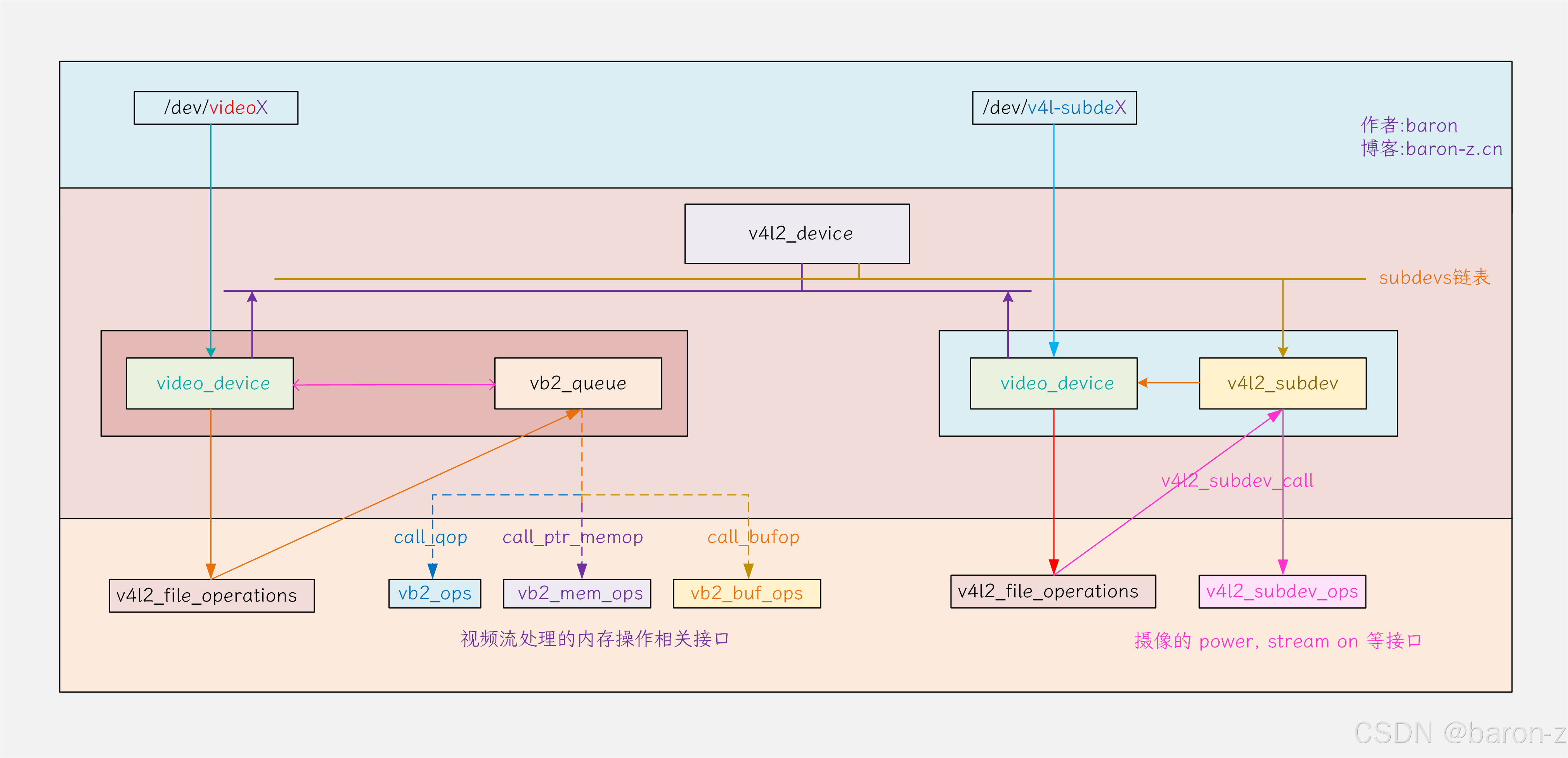
注意: video 指代的是 /dev/videoX 節點對應的設備, 而不是內核中的 video_deivce 數據結構. 這個數據結構無論是 video 設備還是 subdev 設備都用到了.
一、/dev/videoX
????/dev/videoX 設備節點用于攝像頭視頻流的管理, 視頻流數據傳輸, 攝像頭到內存的 dma 傳輸, 視頻流的控制, 啟動停止, 內存分配, 自定義操作等. 它的整體框架如圖所示.
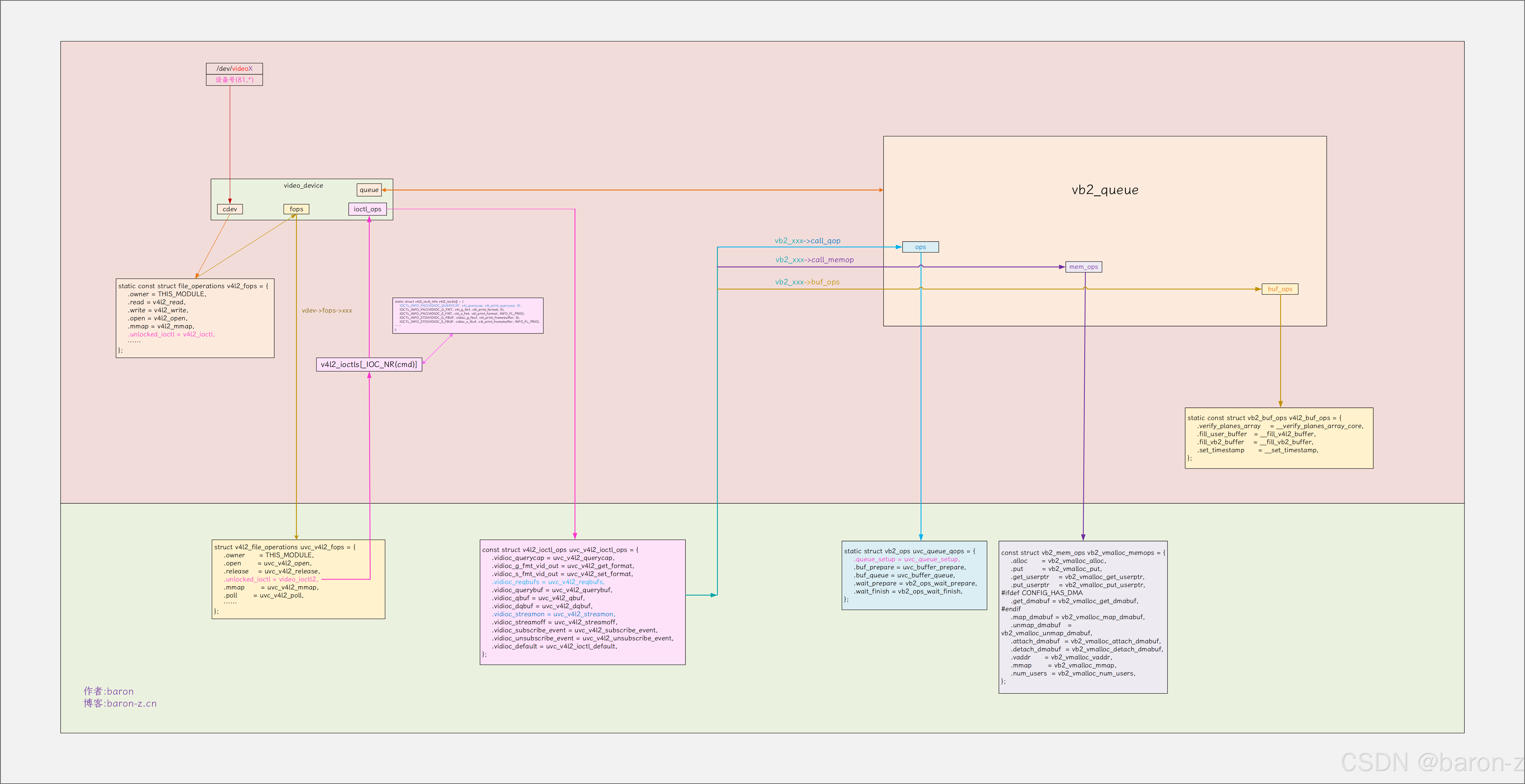
????可以看出 video 設備本質就是字符設備. 主要操作就是一堆 ioctl, 主要的宏如下.
ioctl 宏 | 功能含義 |
|---|---|
VIDIOC_QUERYCAP | 查詢設備能力(如是否支持視頻輸入/輸出、驅動信息等) |
VIDIOC_G_FMT | 獲取當前視頻格式(分辨率、像素格式等) |
VIDIOC_S_FMT | 設置視頻格式(分辨率、像素格式等) |
VIDIOC_REQBUFS | 申請緩沖區(用于流式 I/O 傳輸) |
VIDIOC_QUERYBUF | 查詢緩沖區信息(如內存地址、大小、狀態等) |
VIDIOC_QBUF | 將緩沖區放入隊列(用于數據采集) |
VIDIOC_DQBUF | 從隊列中取出緩沖區(獲取已采集的數據) |
VIDIOC_STREAMON | 啟動視頻流(開始采集數據) |
VIDIOC_STREAMOFF | 停止視頻流(停止采集數據) |
VIDIOC_DEFAULT | 處理未定義的 ioctl 請求(默認操作) |
????對于以上的操作, 對應驅動需要提供三個操作函數 v4l2_ioctl_ops , vb2_ops, 以及 vb2_mem_ops.
1. 查詢設備能力
應用需要返回的數據結構如下.
struct v4l2_capability {__u8 driver[16]; // 驅動模塊的名稱__u8 card[32]; // 視頻設備描述信息, 廠商型號等__u8 bus_info[32]; // 總線信息__u32 version; // 內核版本號, 通過 KERNEL_VERSION 宏獲取__u32 capabilities; // 設備的整體功能__u32 device_caps; // 設備節點的訪問能力__u32 reserved[3]; // 保留
};
對應的 ioctl 宏為 VIDIOC_QUERYCAP
#define VIDEO_DEVICE "/dev/video0"int main() {int fd = open(VIDEO_DEVICE, O_RDWR);// 1. 查詢設備能力struct v4l2_capability cap;ioctl(fd, VIDIOC_QUERYCAP, &cap)...... // 省略部分代碼close(fd);
};
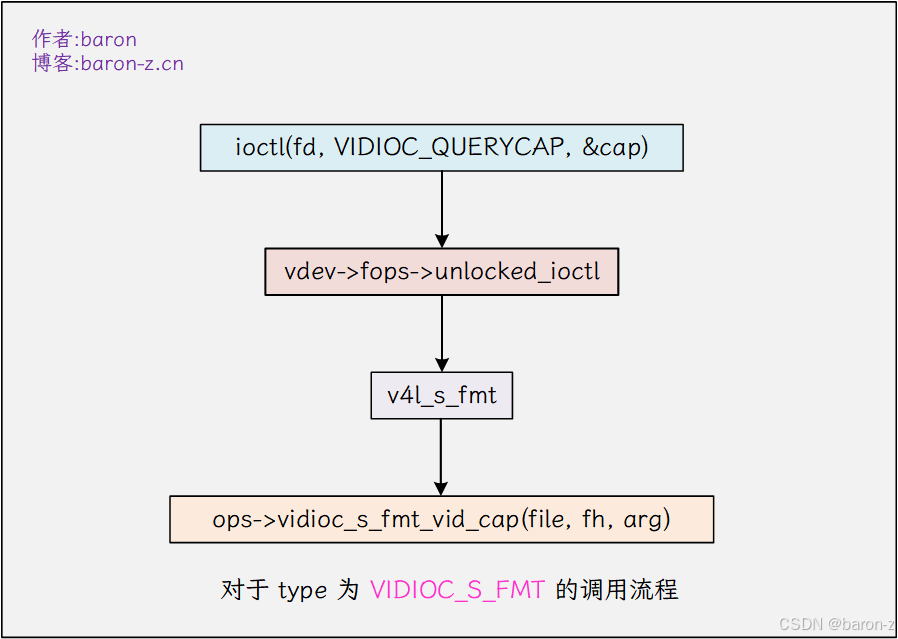
調用流程如下圖
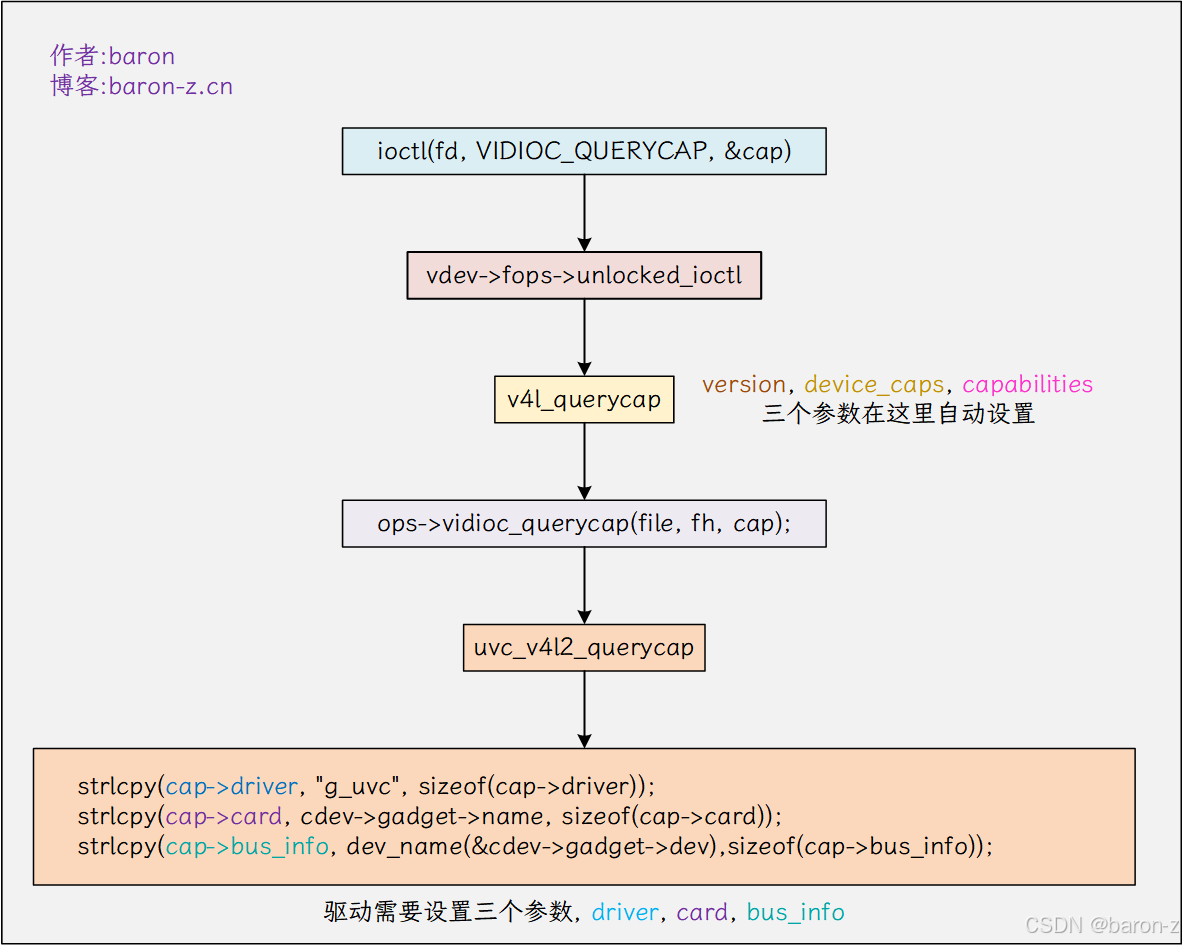
對于該接口, 驅動需要實現 vidioc_querycap 接口. 主要用于提供 cap->driver, cap->card, cap->bus_info
const struct v4l2_ioctl_ops xxx_ioctl_ops = {.vidioc_querycap = xxx_querycap,
};
2. 獲取當前視頻格式
應用需要返回的數據結構如下.
/** 使用時,根據 `type` 字段的值來選擇合適的 `fmt` 字段格式:* - 如果 `type` 是 `V4L2_BUF_TYPE_VIDEO_CAPTURE`,則使用 `pix`* - 如果 `type` 是 `V4L2_BUF_TYPE_VIDEO_CAPTURE_MPLANE`,則使用 `pix_mp`* - 如果 `type` 是 `V4L2_BUF_TYPE_VIDEO_OVERLAY`,則使用 `win`* - 如果 `type` 是 `V4L2_BUF_TYPE_VBI_CAPTURE`,則使用 `vbi`* - 如果 `type` 是 `V4L2_BUF_TYPE_SLICED_VBI_CAPTURE`,則使用 `sliced`* - 如果 `type` 是 `V4L2_BUF_TYPE_SDR_CAPTURE`,則使用 `sdr`* - 如果 `type` 是 `V4L2_BUF_TYPE_META_CAPTURE`,則使用 `meta`* - 如果需要自定義格式,可以使用 `raw_data`*/
struct v4l2_format {__u32 type;union {// 單平面視頻圖像格式(適用于大多數普通攝像頭)struct v4l2_pix_format pix;// 多平面視頻圖像格式(適用于 YUV420 等多平面格式,如現代攝像頭或視頻編解碼器)struct v4l2_pix_format_mplane pix_mp;// 視頻疊加層格式(定義視頻疊加窗口的位置、混合方式等)struct v4l2_window win;// 原始 VBI (Vertical Blanking Interval) 格式// 用于捕獲模擬視頻信號中的垂直消隱期數據(如圖文電視)struct v4l2_vbi_format vbi;// 分片 VBI 格式(結構化的 VBI 數據,按行分片)struct v4l2_sliced_vbi_format sliced;// 軟件定義無線電 (SDR) 格式// 用于定義 SDR 設備的采樣率、調制方式等參數 struct v4l2_sdr_format sdr;// 原始數據緩沖區(保留字段,用于未來擴展或自定義格式)struct v4l2_meta_format meta; __u8 raw_data[200];} fmt;
};
對于普通的攝像頭是會用到 v4l2_pix_format. 這里只以這個為例進行說明
// 描述單平面視頻幀的格式(適用于傳統攝像頭)
struct v4l2_pix_format {// 圖像寬度(像素),例如 1920__u32 width;// 圖像高度(像素),例如 1080__u32 height;// 像素格式(四字符編碼,如 V4L2_PIX_FMT_YUYV 表示 YUV422 格式)__u32 pixelformat;// 掃描模式(枚舉 v4l2_field)// V4L2_FIELD_NONE = 逐行掃描// V4L2_FIELD_INTERLACED = 隔行掃描__u32 field;// 每行像素數據的字節數(包含內存對齊填充)// 計算公式:width * 每像素字節數 + 填充字節// 若為 0 表示無填充(連續存儲)__u32 bytesperline;// 整個圖像數據的總大小(單位:字節)// 典型計算:bytesperline * height__u32 sizeimage;// 顏色空間(枚舉 v4l2_colorspace)// 例如:V4L2_COLORSPACE_SRGB(sRGB 顏色空間)__u32 colorspace;// 私有數據,含義取決于 pixelformat(通常保留使用)__u32 priv;// 格式標志位(V4L2_PIX_FMT_FLAG_* 的位掩碼組合)// 例如:V4L2_PIX_FMT_FLAG_PREMUL_ALPHA(預乘 Alpha 通道)__u32 flags;// 顏色編碼聯合體(根據場景選擇成員)union {// Y'CbCr 編碼標準(如 ITU-R BT.601/709/2020)__u32 ycbcr_enc;// HSV 編碼方式(極少使用場景)__u32 hsv_enc;};// 量化范圍(枚舉 v4l2_quantization)// V4L2_QUANTIZATION_FULL_RANGE = 0-255(PC 范圍)// V4L2_QUANTIZATION_LIM_RANGE = 16-235(TV 范圍,YUV 默認)__u32 quantization;// 傳輸函數(枚舉 v4l2_xfer_func)// 定義光信號到電信號的轉換曲線(如 sRGB 伽馬曲線)__u32 xfer_func;
};
同樣的應用調用如下.
...... // 省略無關代碼struct v4l2_format fmt;fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;ioctl(fd, VIDIOC_G_FMT, &fmt)
......
調用到驅動的調用鏈如下
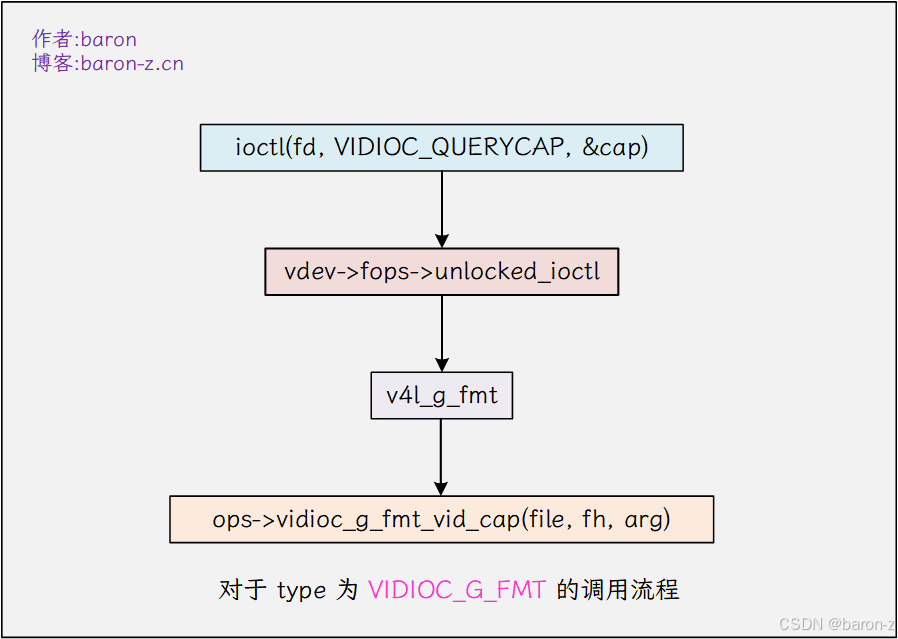
也就是驅動要實現一個 vidioc_g_fmt_vid_cap 用于填充 v4l2_pix_format 數據結構.
const struct v4l2_ioctl_ops xxx_ioctl_ops = {.vidioc_g_fmt_vid_cap = xxx_fmt_vid_cap,
};
3. 設置視頻格式
struct v4l2_format new_fmt;new_fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;new_fmt.fmt.pix.width = 640;new_fmt.fmt.pix.height = 480;new_fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV;new_fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;ioctl(fd, VIDIOC_S_FMT, &new_fmt)
調用流程如下
驅動需要實現 vidioc_s_fmt_vid_cap 函數, 用于設置攝像頭格式.
const struct v4l2_ioctl_ops xxx_ioctl_ops = {.vidioc_s_fmt_vid_cap = xxx_fmt_vid_cap,
};
4. 申請緩沖區
????v4l2 支持 4 種分配內存的方式 mmap, user, overlay, dma-buf. 本文只講前兩種常用的, 在內核中使用 vb2_queue 來管理 buffer. 在內核中如下圖所示
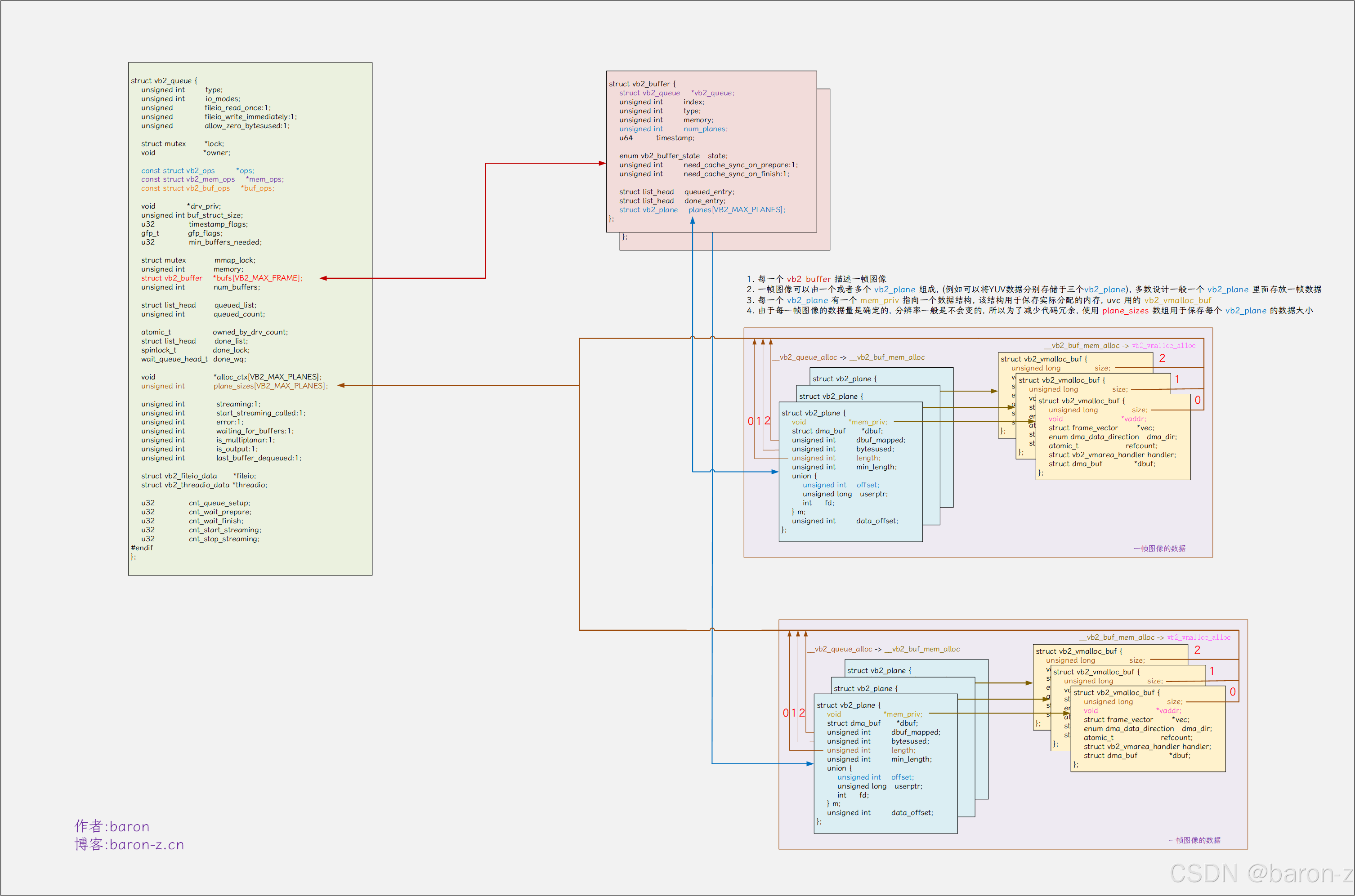
- 每一個 vb2_buffer 用于描述一幀圖像
- 一幀圖像可以由一個或者多個 vb2_plane 組成, (例如可以將 YUV 數據分別存儲于三個 vb2_plane), 大多數情況一個 vb2_plane 里面存放一幀數據
- 每一個 vb2_plane 有一個 mem_priv 指向一個數據結構, 該結構用于保存實際分配的內存, videobuf2 為我們提供了一個數據結構 vb2_vmalloc_buf.
- 由于每一幀圖像的數據量是確定的, 分辨率一般是不會變的, 所以為了減少代碼冗余, 使用 plane_sizes 數組用于保存每個 vb2_plane 的數據大小
1) mmap 方式
????用于空間需要用到 v4l2_requestbuffers 用來要分配的內存類型.
struct v4l2_requestbuffers {__u32 count; // 緩沖區的數量__u32 type; // 緩沖區的類型, 由 v4l2_buf_type 進行描述__u32 memory; // 內存分配的方式__u32 capabilities;__u32 reserved[1];
};// 可用的 type , 常用的就兩個
enum v4l2_buf_type {V4L2_BUF_TYPE_VIDEO_CAPTURE = 1, // 捕獲視頻流數據V4L2_BUF_TYPE_VIDEO_OUTPUT = 2, // 輸出視頻流數據.....// 省略/* Deprecated, do not use */V4L2_BUF_TYPE_PRIVATE = 0x80,
};// memory 的類型有四種
enum v4l2_memory {V4L2_MEMORY_MMAP = 1, // mmap 內核空間分配V4L2_MEMORY_USERPTR = 2, // user 用戶空間分配V4L2_MEMORY_OVERLAY = 3, // 覆蓋模式, 將數據直接映射到顯存V4L2_MEMORY_DMABUF = 4, // dma-buf
};
應用的調用方式如下所示
struct v4l2_requestbuffers req;req.count = 4;req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;req.memory = V4L2_MEMORY_MMAP;ioctl(fd, VIDIOC_REQBUFS, &req);
驅動的調用流程如下.
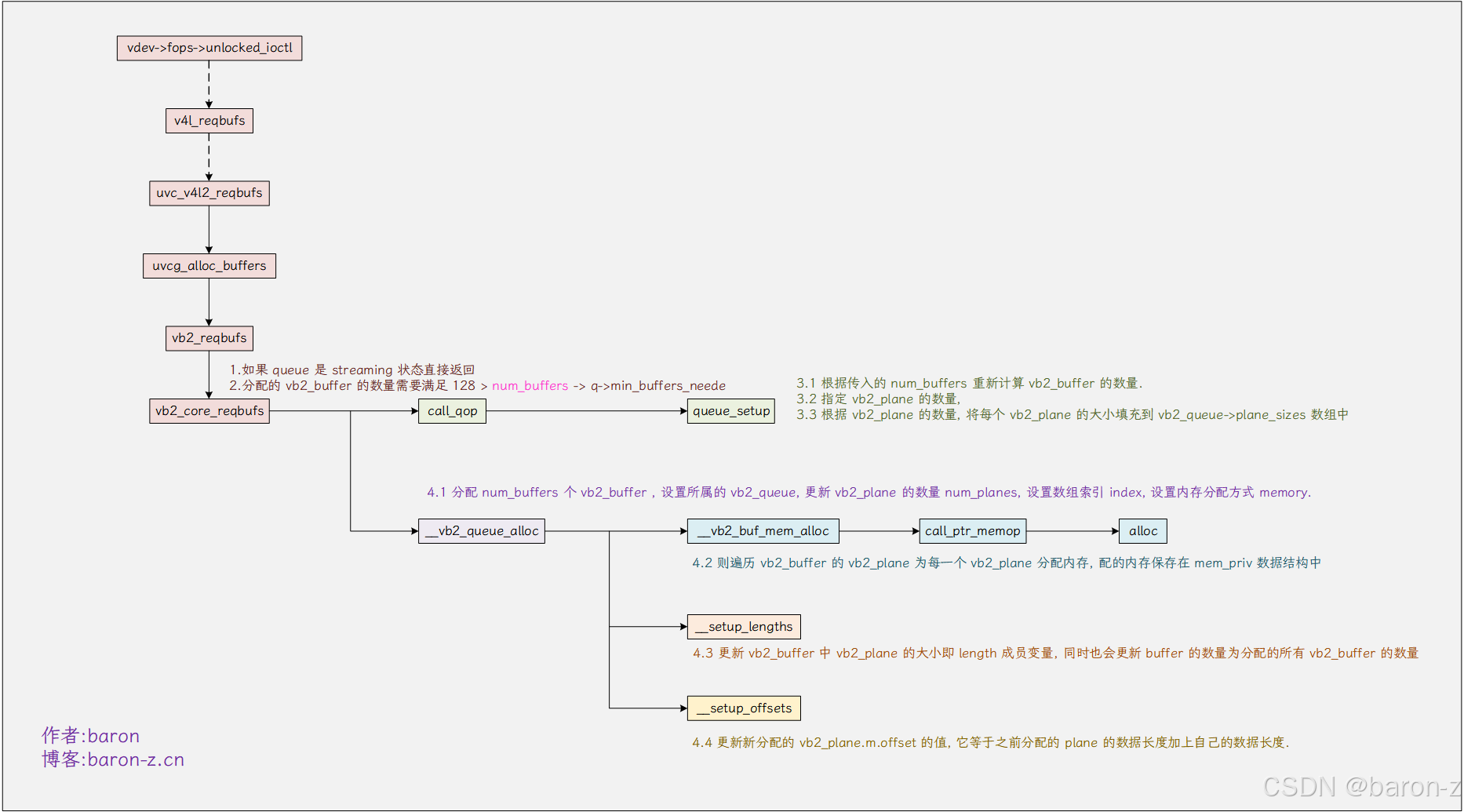
????從調用流程可以知道驅動要實現的接口有 queue_setup
static const struct vb2_ops uvc_queue_qops = {.queue_setup = uvc_queue_setup,......
};
????傳入的 count 被轉換為 num_buffers, 但具體的數量由驅動決定, 以及每一個 vb2_buffer 的數量也是由驅動決定的. 因此 uvc_queue_setup 包含以下內容.
- 根據傳入的 num_buffers 重新計算 vb2_buffer 的數量.
- 指定 vb2_plane 的數量, 大部分情況為 1
- 根據 vb2_plane 的數量, 將每個 vb2_plane 的大小填充到 vb2_queue->plane_sizes 數組中
????可以參考 uvc 驅動的實現 drivers/usb/gadget/function/uvc_queue.c, 這里就不搬代碼了.從上面的圖可以看出 __vb2_queue_alloc 函數也是非常重要的函數我這里就直接附上源碼.
static int __vb2_queue_alloc(struct vb2_queue *q, enum vb2_memory memory,unsigned int num_buffers, unsigned int num_planes)
{unsigned int buffer;struct vb2_buffer *vb;int ret;// 分配 num_buffers 個 vb2_bufferfor (buffer = 0; buffer < num_buffers; ++buffer) {vb = kzalloc(q->buf_struct_size, GFP_KERNEL); // 分配 vb2_bufferif (!vb) {dprintk(1, "memory alloc for buffer struct failed\n");break;}// 設置 buffer 的 state 為已出隊狀態// VB2_BUF_STATE_DEQUEUED: 已出隊, 代表緩沖區已被用戶空間取出,當前由用戶應用程序控制// VB2_BUF_STATE_PREPARING: 準備中, 緩沖還未完全初始化// VB2_BUF_STATE_PREPARED: videobuf 和驅動程序已完成緩沖區的準備,緩沖區可用于硬件操作// VB2_BUF_STATE_QUEUED: 緩沖區已加入 videobuf 隊列,但尚未送至驅動程序處理// VB2_BUF_STATE_REQUEUEING: 緩沖區正在重新提交給驅動程序進行處理// VB2_BUF_STATE_ACTIVE: 緩沖區已經被驅動程序接收,并可能正在用于硬件操作(如視頻采集、編碼等)// VB2_BUF_STATE_DONE: 硬件或驅動已處理完緩沖區,并返回到 videobuf,但尚未被用戶空間取出, 操作完成,等待用戶獲取// VB2_BUF_STATE_ERROR: 緩沖區處理過程中發生錯誤vb->state = VB2_BUF_STATE_DEQUEUED;vb->vb2_queue = q; // 設置所屬的 vb2_queuevb->num_planes = num_planes; // 設置 vb2_plane 的數量vb->index = q->num_buffers + buffer; // 設置 index , 該 index 也是數組標vb->type = q->type; // 設置 typevb->memory = memory; // 設置內存分配方式if (memory == VB2_MEMORY_MMAP) {// 遍歷 vb2_buffer 的 vb2_plane 為每一個 vb2_plane 分配內存// 分配的內存保存在 mem_priv 數據結構中, 具體內存的分配方式由b->vb2_queue->mem_ops->alloc 提供, vb2_plane 的大小更新到 length 成員變量ret = __vb2_buf_mem_alloc(vb);if (ret) {dprintk(1, "failed allocating memory for ""buffer %d\n", buffer);kfree(vb);break;}// 如果 ops 設置了 buf_init 則調用該函數對 buffer 進一步初始化.ret = call_vb_qop(vb, buf_init, vb);if (ret) {dprintk(1, "buffer %d %p initialization"" failed\n", buffer, vb);__vb2_buf_mem_free(vb);kfree(vb);break;}}// 將 vb2_buffer 保存到 vb2_queue->bufs[]數組中 中q->bufs[q->num_buffers + buffer] = vb;}// 更新 vb2_buffer 中 vb2_plane 的大小__setup_lengths(q, buffer);// 更新新分配的 vb2_plane.m.offset 的值, 它等于之前分配的 plane 的數據長度加上自己的數據長度. if (memory == VB2_MEMORY_MMAP)__setup_offsets(q, buffer);dprintk(1, "allocated %d buffers, %d plane(s) each\n",buffer, num_planes);return buffer;
}
這個函數的功能如下
- 分配 num_buffers 個 vb2_buffer , 設置所屬的 vb2_queue, 更新 vb2_plane 的數量 num_planes, 設置數組索引 index, 設置內存分配方式 memory.
- 如果內存分配方式是 VB2_MEMORY_MMAP, 則遍歷 vb2_buffer 的 vb2_plane 為每一個 vb2_plane 分配內存, 配的內存保存在 mem_priv 數據結構中, 具體內存的分配方式由
b->vb2_queue->mem_ops->alloc提供 - 更新 vb2_buffer 中 vb2_plane 的大小即 length 成員變量.
- 如果內存分配的方式是 VB2_MEMORY_MMAP , 更新新分配的 vb2_plane.m.offset 的值, 它等于之前分配的 vb2_plane 的數據長度加上自己的數據長度. 我們只需要知道 vb2_plane.m.offset 每一個 vb2_plane 都是唯一的, 它也是作為 plane 的索引.
其中驅動需要提供 alloc 函數, 用于分配實現內存分配接口.
const struct vb2_mem_ops vb2_vmalloc_memops = {.alloc = vb2_vmalloc_alloc,......
}
對于 vb2_mem_ops 我們一般使用默認的 vb2_buffer 提供的默認接口, 這里 alloc 則對應 vb2_vmalloc_alloc.
static void *vb2_vmalloc_alloc(void *alloc_ctx, unsigned long size,enum dma_data_direction dma_dir, gfp_t gfp_flags)
{struct vb2_vmalloc_buf *buf;buf = kzalloc(sizeof(*buf), GFP_KERNEL | gfp_flags);if (!buf)return NULL;buf->size = size; // 設置 buffer 的大小buf->vaddr = vmalloc_user(buf->size); // 分配虛擬內存buf->dma_dir = dma_dir; // 設置 dma_dirbuf->handler.refcount = &buf->refcount;buf->handler.put = vb2_vmalloc_put;buf->handler.arg = buf;if (!buf->vaddr) {pr_debug("vmalloc of size %ld failed\n", buf->size);kfree(buf);return NULL;}atomic_inc(&buf->refcount);return buf;
}
????這個函數就是用于分配內存的, vb2 提供了一個默認的數據結構. 這個數據結構被保存到了 vb2_buffer->planes[plane].mem_priv.
struct vb2_vmalloc_buf {void *vaddr; // 用于保存分配的內存的虛擬地址.struct frame_vector *vec;enum dma_data_direction dma_dir;unsigned long size;refcount_t refcount;struct vb2_vmarea_handler handler;struct dma_buf *dbuf; // 如果是 dma_buf 則放到這里
};
總結
- 驅動需要實現
vb2_ops->queue_setup用于提供 vb2_buffer 的數量, vb2_plane 的數量和大小. - 驅動需要還需要實現另一個接口
vb2_mem_ops->alloc用于分配實際的內存空間, 大多數情況, 使用videobuf2-vmalloc.c中提供的vb2_vmalloc_alloc函數, 當然也可以根據需求自己實現.
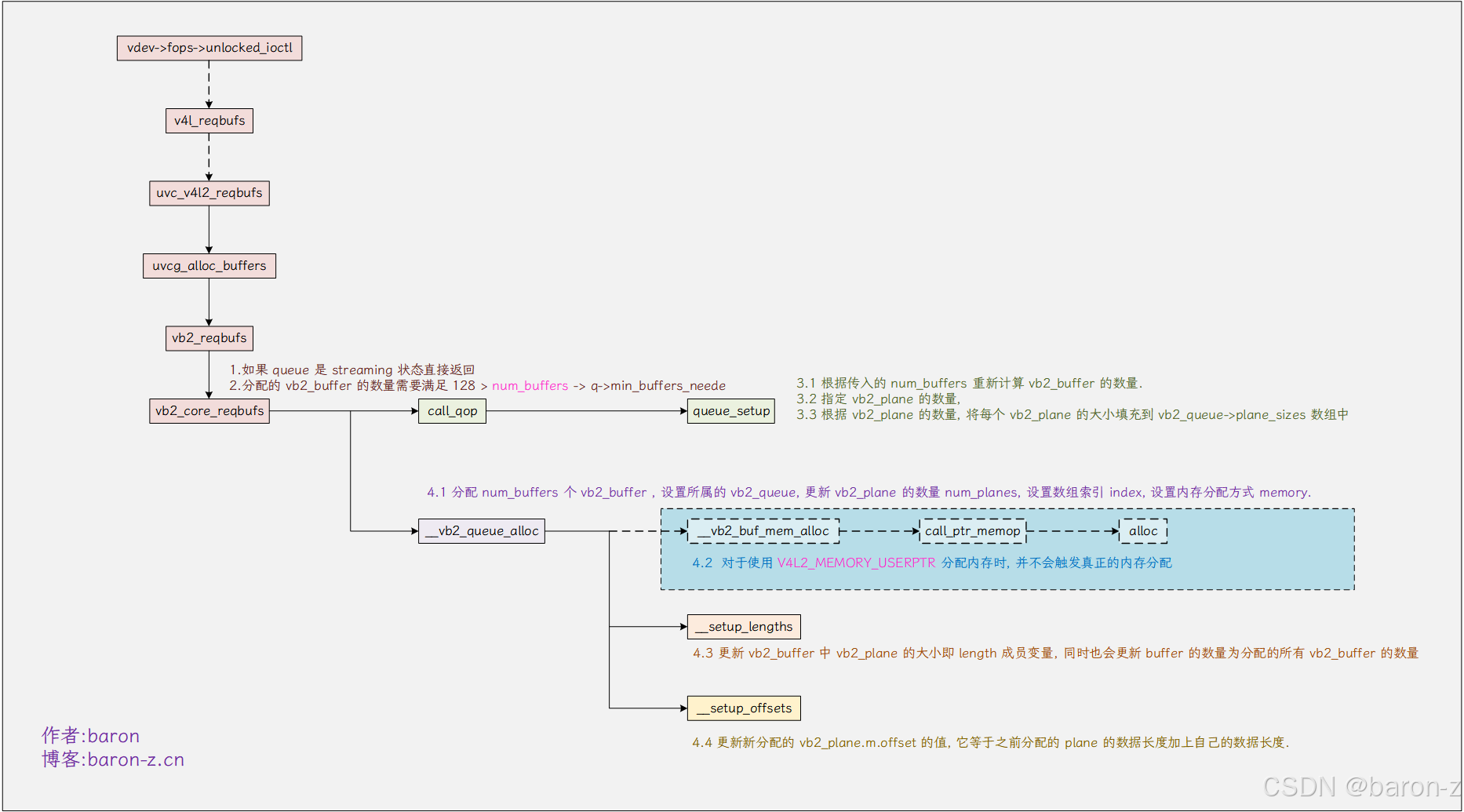
2) user 分配
????user 分配和 mmap 分配完全一樣只是不會調用 __vb2_buf_mem_alloc 分配觸發真正的內存分配而已. 因為真正的內存由用戶空間分配, 在 VIDIOC_QBUF 提交 buffer 到內核操作的時候會分配該 __vb2_buf_mem_alloc, 并將轉換后的虛擬地址填充到該結構.
5. 查詢緩沖區信息
????查詢緩沖區的作用就是返回前面分配的內存信息, 即返回內核里面的 v4l2_buffer.
......struct v4l2_buffer buf;buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;buf.memory = V4L2_MEMORY_MMAP;buf.index = 0;ioctl(fd, VIDIOC_QUERYBUF, &buf);
......
調用流程如下所示
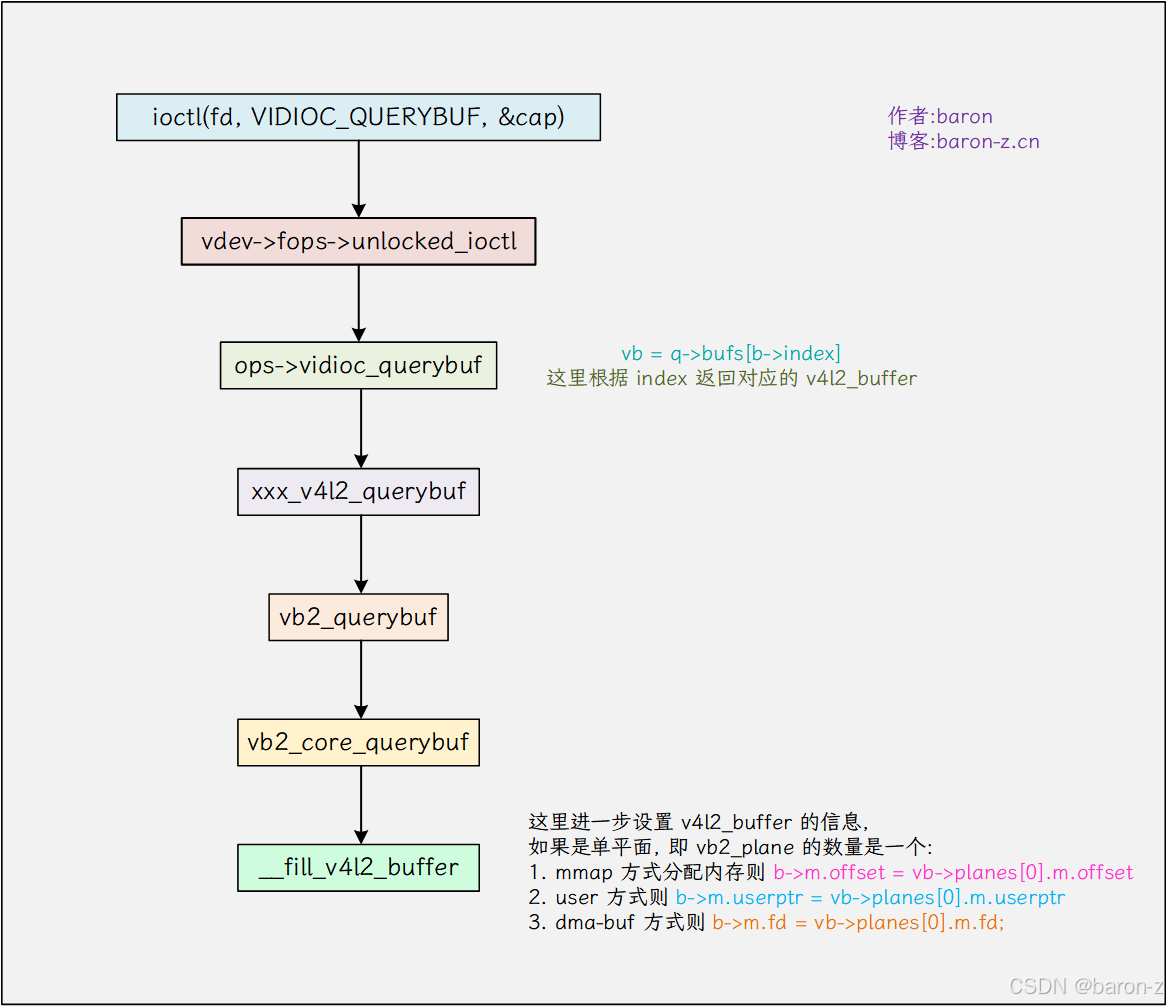
????根據 index 返回分配的對應的 v4l2_buffer , 不同內存分配的方式也會返回不同的信息.
- mmap 分配的內存則會返回 b->m.offset 這個則是 mmap 的索引
- user 方式則返回 b.m->userptr 指向用戶空間分配的內存
- dma-buf 方式則返回對應 b.m.fd
6. 將緩沖區放入隊
struct v4l2_buffer buf;buf.index = 0;buf.length = dev->mem[i].length;buf.m.userptr = (unsigned long)dev->mem[i].start;buf.type = V4L2_BUF_TYPE_VIDEO_OUTPUT;if (ioctl(fd, VIDIOC_QBUF, &buf) == -1) {perror("將緩沖區放入隊列失敗");close(fd);return 1;}
調用流程如下所示
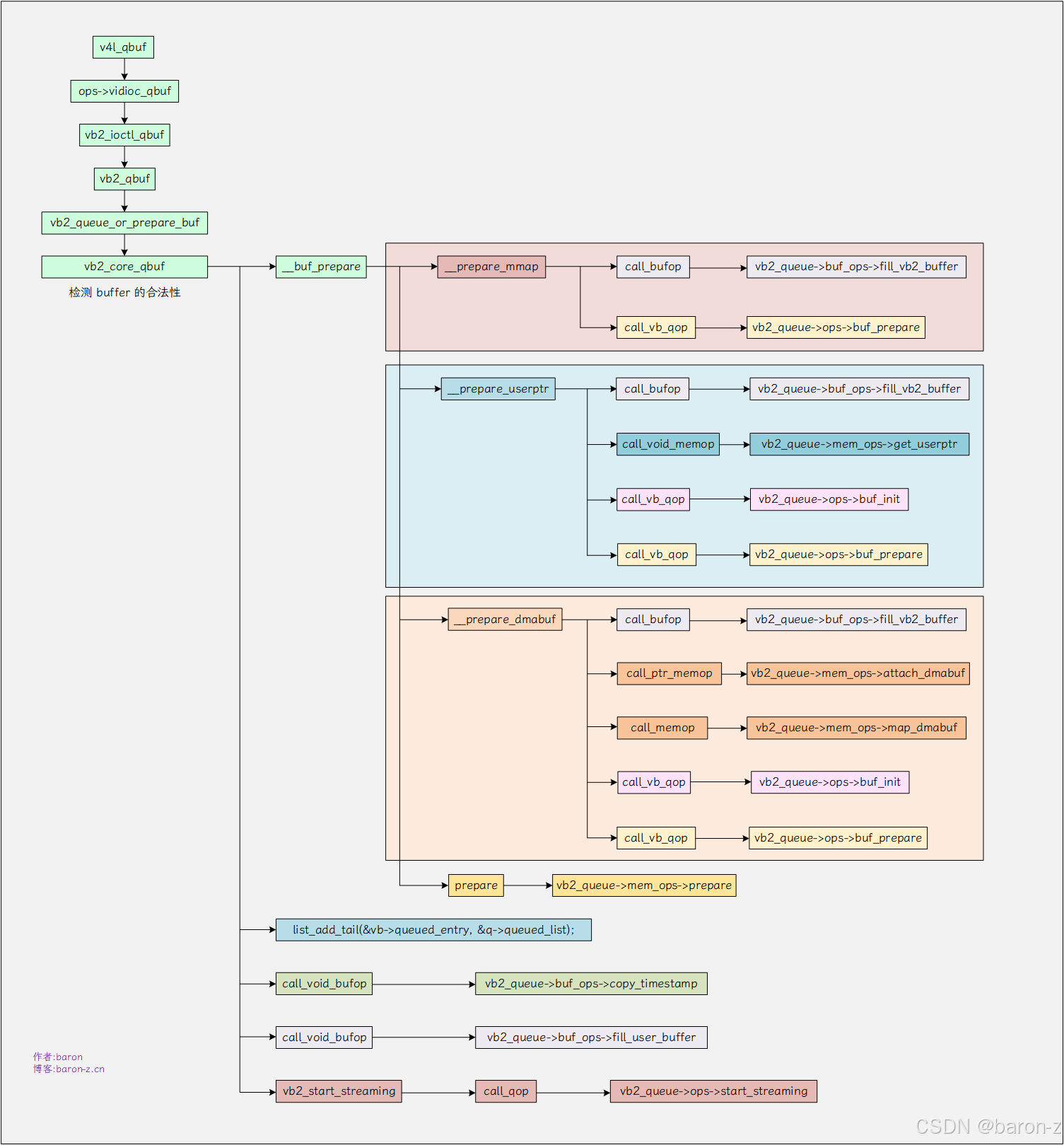
????從調用鏈可以看出, 對于 VIDIOC_QBUF 操作就是一些回調函數的實現, 主要需要實現的函數如下所示.
1) fill_vb2_buffer
非必須實現, 該接口用于更新用戶傳入的 vb2_buffer , 即用內核里面的 vb2_buffer 更新用戶空間傳入的 vb2_buffer. 內核為我們提供了一個默認的實現 __fill_vb2_buffer. 當調用內核的 vb2_queue_init 初始化 vb2_queue 時設置.
//drivers/media/common/videobuf2/videobuf2-v4l2.c
static const struct vb2_buf_ops v4l2_buf_ops = {.fill_vb2_buffer = __fill_vb2_buffer,
};int vb2_queue_init(struct vb2_queue *q)
{......q->buf_ops = &v4l2_buf_ops;......
};
2) buf_prepare
該接口用于驅動對 buffer 在放入鏈表 vb2_queue->queued_lis 前作處理.
static struct vb2_ops uvc_queue_qops = {...... .buf_prepare = uvc_buffer_prepare,......
};static int uvc_buffer_prepare(struct vb2_buffer *vb)
{struct uvc_video_queue *queue = vb2_get_drv_priv(vb->vb2_queue);struct vb2_v4l2_buffer *vbuf = to_vb2_v4l2_buffer(vb);struct uvc_buffer *buf = container_of(vbuf, struct uvc_buffer, buf);.... // 更新 buffer 狀態buf->state = UVC_BUF_STATE_QUEUED;buf->mem = vb2_plane_vaddr(vb, 0); // 獲取 buffer 的虛擬地址buf->length = vb2_plane_size(vb, 0); // 獲取 buffer 的大小if (vb->type == V4L2_BUF_TYPE_VIDEO_CAPTURE)buf->bytesused = 0;elsebuf->bytesused = vb2_get_plane_payload(vb, 0);return 0;
}
????對于 uvc 來說就是更新私有 uvc_buffer 的虛擬地址和 buffer 的大小 buf_prepare 會對 vb2_buffer 做預處理. 它和后面 buf_queue 是兩個相互配合的接口. uvc 和一些常規的驅動, 會在這里拿到 vb2_buffer 的虛擬地址. 還有一些例如 rk 的驅動會在 buf_queue 中拿走虛擬地址. 就是 camer 控制器的圖像傳輸用到的內存地址是從 buf_prepare或者 buf_queue 獲取的. 具體取決于驅動的選擇.
3) get_userptr
????如果需要支持用戶空間分配內存必須實現, 該接口用于將用戶空間的分配的內存地址, 轉換為內核空間的虛擬地址. 內核也提供了默認的實現 vb2_vmalloc_get_userptr, 一般情況初始化 vb2_queue 時設置, 參考 uvc
const struct vb2_mem_ops vb2_vmalloc_memops = {.......get_userptr = vb2_vmalloc_get_userptr,......
};int uvcg_queue_init(struct uvc_video_queue *queue, enum v4l2_buf_type type,struct mutex *lock)
{int ret;// ...... 省略部分代碼queue->queue.ops = &uvc_queue_qops; // 初始化 vb2_ops//......queue->queue.mem_ops = &vb2_vmalloc_memops; // 初始化 vb2_mem_ops//......ret = vb2_queue_init(&queue->queue);// ......return 0;
}
????vb2_vmalloc_get_userptr 會創建 vb2_vmalloc_buf 用來保存內存的內核虛擬地址, 如果是 mmap 則在申請內存操作 VIDIOC_REQBUFS 時分配, 用戶分配則挪到了這里.
static void *vb2_vmalloc_get_userptr(struct device *dev, unsigned long vaddr,unsigned long size,enum dma_data_direction dma_dir)
{struct vb2_vmalloc_buf *buf;struct frame_vector *vec;int n_pages, offset, i;int ret = -ENOMEM;buf = kzalloc(sizeof(*buf), GFP_KERNEL);if (!buf)return ERR_PTR(-ENOMEM);buf->dma_dir = dma_dir;offset = vaddr & ~PAGE_MASK;buf->size = size;// ...... 省略部分代碼if (frame_vector_to_pages(vec) < 0) {buf->vaddr = (__force void *)ioremap_nocache(__pfn_to_phys(nums[0]), size + offset);} else {buf->vaddr = vm_map_ram(frame_vector_pages(vec), n_pages, -1, PAGE_KERNEL);}buf->vaddr += offset;return buf;
}
4) buf_init
????如果一直沒有分配 mem_priv 則會嘗試調用 buf_init, 沒看到有啥驅動用到, 不做分析.
5) attach_dmabuf 和 map_dmabuf
????dma-buf 中用獲取 dma-buf 內存的回調接口. 這里也不詳細描述. 后面可能會補充.
6) start_streaming
????嘗試開始取流, 如果 q->streaming 設置了且檢測到 queued_count 小于 min_buffers_needed, 則嘗試觸發取流操作.
7) 總結
- VIDIOC_QBUF 參數用于將緩沖區放入隊列, 分三種情況 mmap、 user 和 dma-buf. 分別對應三種內存分配的方式. 不同的方式需要實現的回調不同.
- 用戶空間只需要提供內存的分配方式, 以及
buf.index. 緩沖區的分配要通過VIDIOC_REQBUFS來實現. 簡單的操作就是分配之后用VIDIOC_QUERYBUF拿到分配的 vb2_buffer. 用這個 buffer 來實現VIDIOC_QBUF操作 - 內核會更新用戶傳入的 vb2_buffer 信息, 同步為內核的 vb2_buffer.
- 將
vb->queued_entry鏈接到&q->queued_list, 同時增加q->queued_count的引用計數. 鏈表q->queued_list就是等待處理buffer的鏈表.
7. 啟動視頻流
if (ioctl(fd, VIDIOC_STREAMON, &buf.type) == -1) {perror("啟動視頻流失敗");close(fd);return 1;}
調用流程如下.
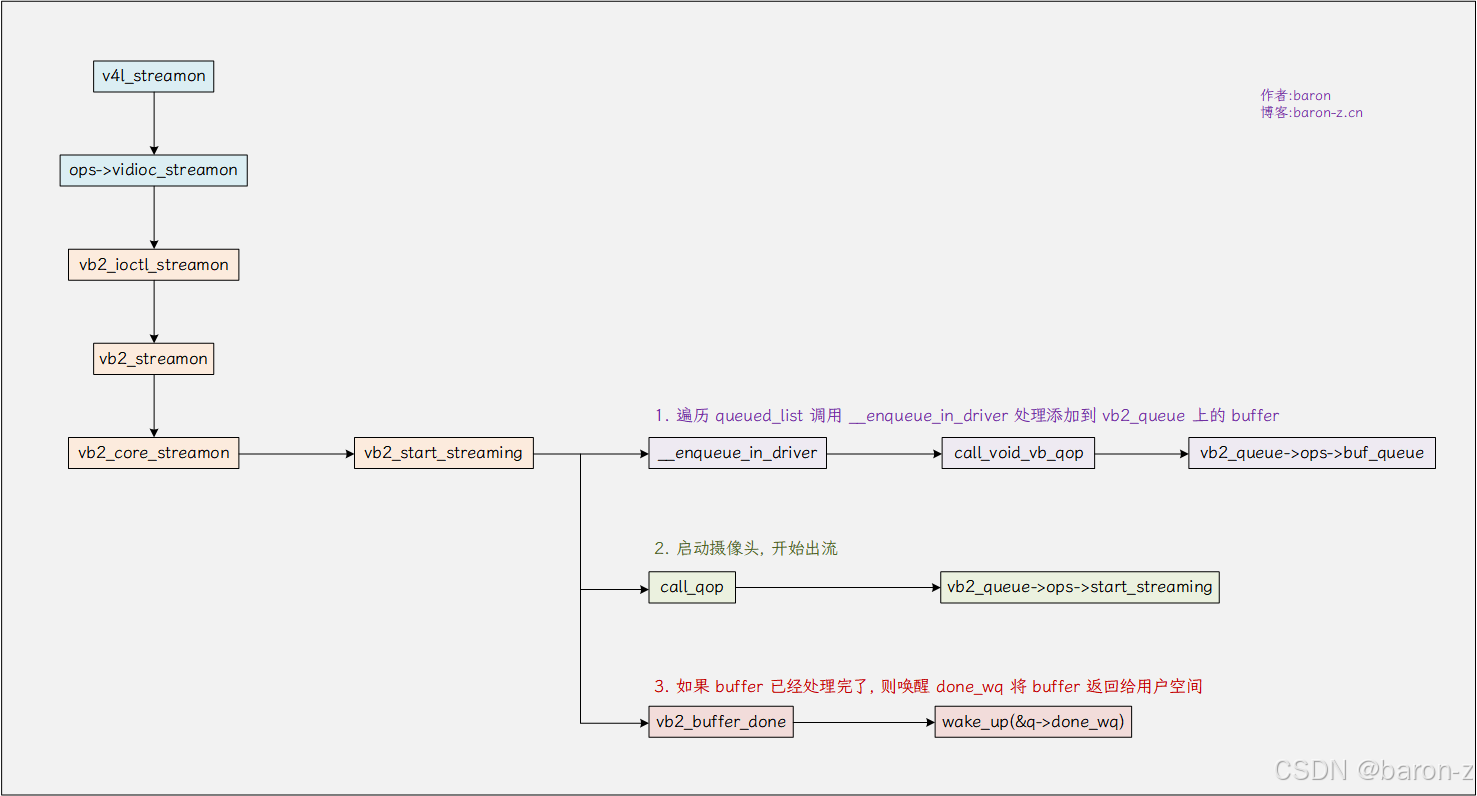
1) buf_queue
????在啟動視頻流前遍歷需要處理的 buffer, 做啟動前的預處理. 部分驅動在這里獲取 vb2_buffer 的地址給到 carme 控制器.
static struct vb2_ops rkcif_vb2_ops = {// .......wait_prepare = vb2_ops_wait_prepare,// ......
};static void rkcif_buf_queue(struct vb2_buffer *vb)
{// ......for (i = 0; i < fmt->mplanes; i++) {void *addr = vb2_plane_vaddr(vb, i); // 獲取 vb2_buffer 的虛擬地址if (hw_dev->iommu_en) {struct sg_table *sgt = vb2_dma_sg_plane_desc(vb, i);// 填充到 carmera 控制器的 buffercifbuf->buff_addr[i] = sg_dma_address(sgt->sgl);} else {cifbuf->buff_addr[i] = vb2_dma_contig_plane_dma_addr(vb, i);}}// ......
2) vidioc_streamon
????啟動視頻流的回調接口, 可以直接實現啟動功能, 參考 uvc 驅動的實現
const struct v4l2_ioctl_ops uvc_v4l2_ioctl_ops = {//....vidioc_streamon = uvc_v4l2_streamon,// ...
};
????或者這里使用內核的默認實現 vb2_ioctl_streamon, 然后在實現 start_streaming 作為驅動真正的流啟動接口. 以 vimc 為例, 如下所示.
static const struct v4l2_ioctl_ops vimc_cap_ioctl_ops = {.......vidioc_streamon = vb2_ioctl_streamon,......
};static const struct vb2_ops vimc_cap_qops = {// .......start_streaming = vimc_cap_start_streaming,// ......
};
????這里可以寫寄存器啟動 sensor 也可以通過 v4l2_subdev_call 接口調用 senor 的 subdev 對應的啟動接口啟動.
3. vb2_buffer_done
????如果 buffer 已經處理完了, 則喚醒 done_wq 將 buffer 返回給用戶空間.
8. 從隊列中取出緩沖
if (ioctl(fd, VIDIOC_DQBUF, &buf) == -1) {perror("從隊列中取出緩沖區失敗");close(fd);return 1;}
調用流程如下所示.
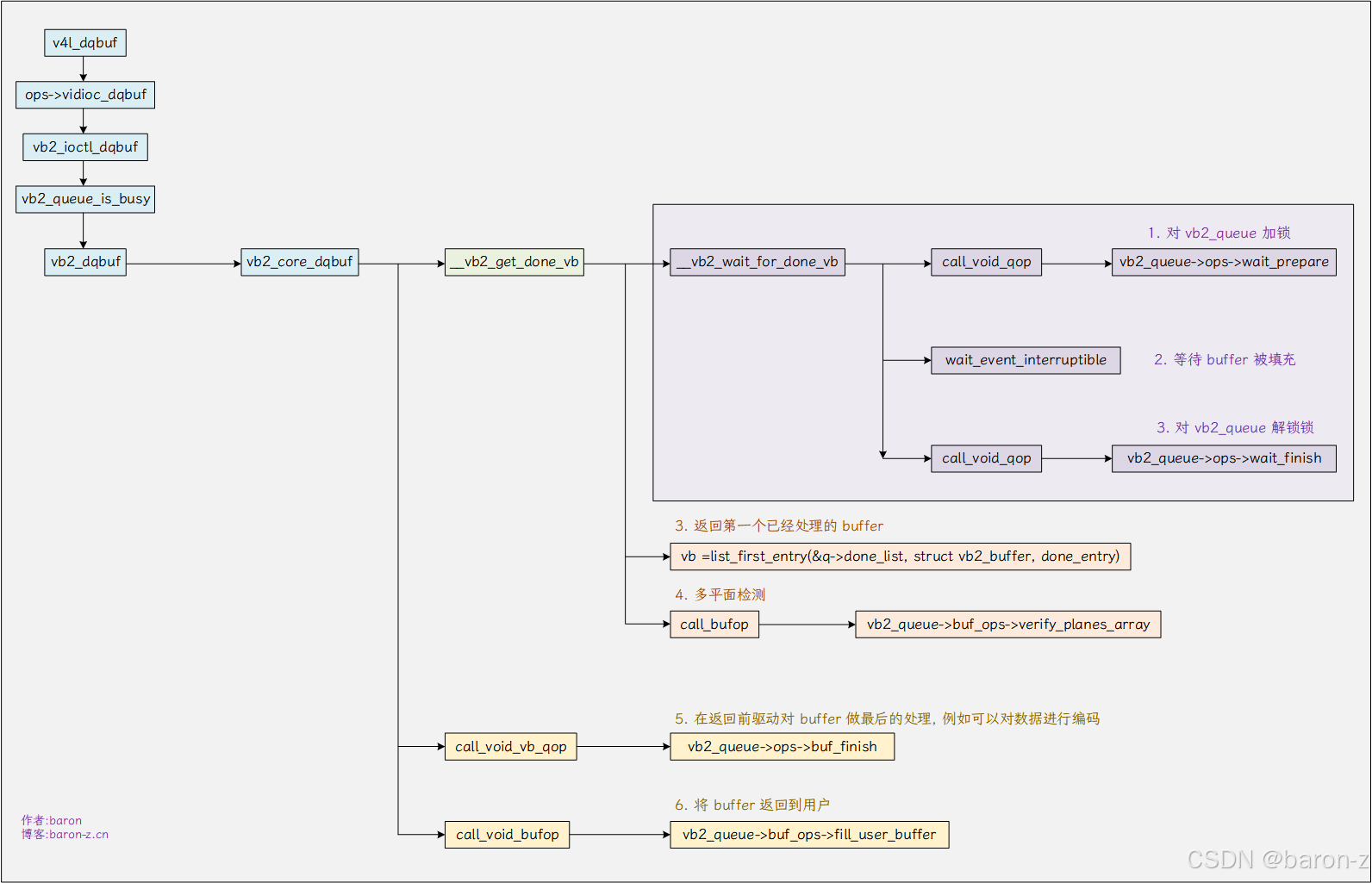
從緩沖區沖取出隊列的關鍵函數是 __vb2_wait_for_done_vb, 他的功能如下
static int __vb2_wait_for_done_vb(struct vb2_queue *q, int nonblocking)
{for (;;) {int ret;if (q->waiting_in_dqbuf) { // 當前有其他進程在等待緩沖區, 則直接返回return -EBUSY;}if (!q->streaming) { // 視頻流停止了也直接返回return -EINVAL;}if (q->error) { // 隊列中有錯誤也直接返回return -EIO;}if (q->last_buffer_dequeued) { // 最后一個緩沖區出隊返回return -EPIPE;}if (!list_empty(&q->done_list)) { // 如果已經有完成的緩沖區退出break;}if (nonblocking) { // 沒有緩沖區直接返回return -EAGAIN;}q->waiting_in_dqbuf = 1; // 設置占用該 vb2_queuecall_void_qop(q, wait_prepare, q); // 回調 vb2_queue->ops->wait_prepare 加鎖// 進入等待, 等待緩沖區準備好.dprintk(3, "will sleep waiting for buffers\n");ret = wait_event_interruptible(q->done_wq,!list_empty(&q->done_list) || !q->streaming ||q->error);call_void_qop(q, wait_finish, q); // 回調 vb2_queue->ops->wait_finish 解鎖q->waiting_in_dqbuf = 0; // 釋放占用}return 0;
}
- 當前有其他進程在等待緩沖區 q->waiting_in_dqbuf、視頻流停止了 !q->streaming、隊列中有錯誤q->error、最后一個緩沖區已經出隊 q->last_buffer_dequeued、都立即返回.
- 調用 wait_prepare 默認實現為 vb2_ops_wait_prepare 為 vb2_queue 加鎖. 設置 q->waiting_in_dqbuf 表示當前進程占用該 vb2_queue.
- wait_event_interruptible 進入等待, 當 buffer 準備好會觸發中斷, 在中斷中調用 vb2_buffer_done 喚醒 q->done_wq 隊列返回.
- 調用 wait_finish 默認實現為 vb2_ops_wait_finish 為 vb2_queue 解鎖. 清除 q->waiting_in_dqbuf 釋放前進程占用 vb2_queue.
9. mmap 映射內存
void *buffer_start;
buffer_start = mmap(NULL, buf.length, PROT_READ | PROT_WRITE, MAP_SHARED, fd, buf.m.offset);
????映射內存就是通過 buf.m.offset 找到對應的 vb2_plane , 然后映射其內存到用戶空間.內核為我們提供了默認實現, 調用流程如下所示.
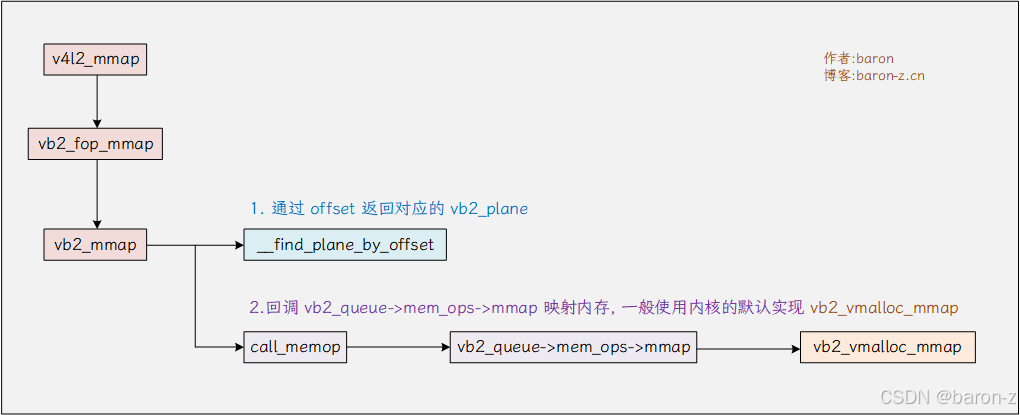
這里貼一下關鍵代碼, 這部分內存主要是內存映射想關, 不再這篇文章過多贅述.
vb2_vmalloc_mmap() -->remap_vmalloc_range() --> // 這里就把內核的虛擬內存映射到用戶空間了vma->vm_start = (unsigned long)(addr + (pgoff << PAGE_SHIFT));vma->vm_end = vma->vm_start + size;
10. 停止視頻流
if (ioctl(fd, VIDIOC_STREAMOFF, &buf.type) == -1) {perror("停止視頻流失敗");close(fd);return 1;
}
調用流程如下.
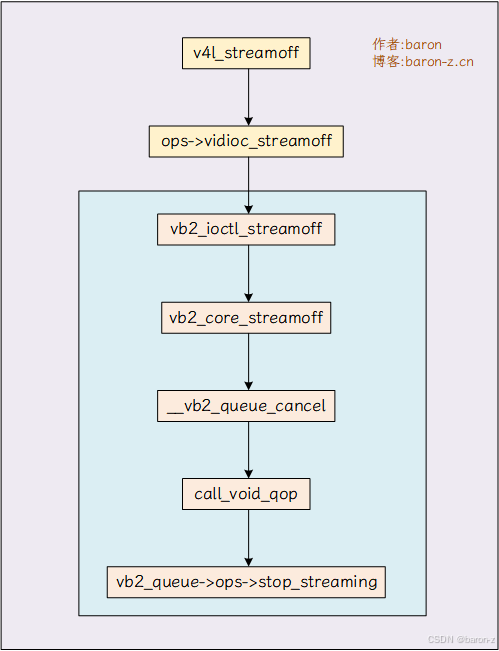
和啟動流相同, 可以在 ops->vidioc_streamoff 中就直接實現停止操作, 例如 uvc
const struct v4l2_ioctl_ops uvc_v4l2_ioctl_ops = {// .......vidioc_streamoff = uvc_v4l2_streamoff,// ......
};
也可以調用通用的接口 vb2_ioctl_streamoff, 然后在實現 vb2_queue->ops->stop_streaming 接口用于真正的停止操作. 如下所示
static const struct v4l2_ioctl_ops vpif_ioctl_ops = {// .......vidioc_streamoff = vb2_ioctl_streamoff, // 調通通用接口// ......
};static const struct vb2_ops video_qops = {// .......stop_streaming = vpif_stop_streaming, // 真正的停止接口// ......
};
11. 總結
????完整的整理整個 /dev/videox 的操作流程可以發現, 其實就是對 vb2_buffer 的操作. 它聚焦于視頻的流處理.下圖完整的展示了一幀圖像的處理流程(這圖對應 mmap). 的這些步驟已近是很精簡的步驟了.
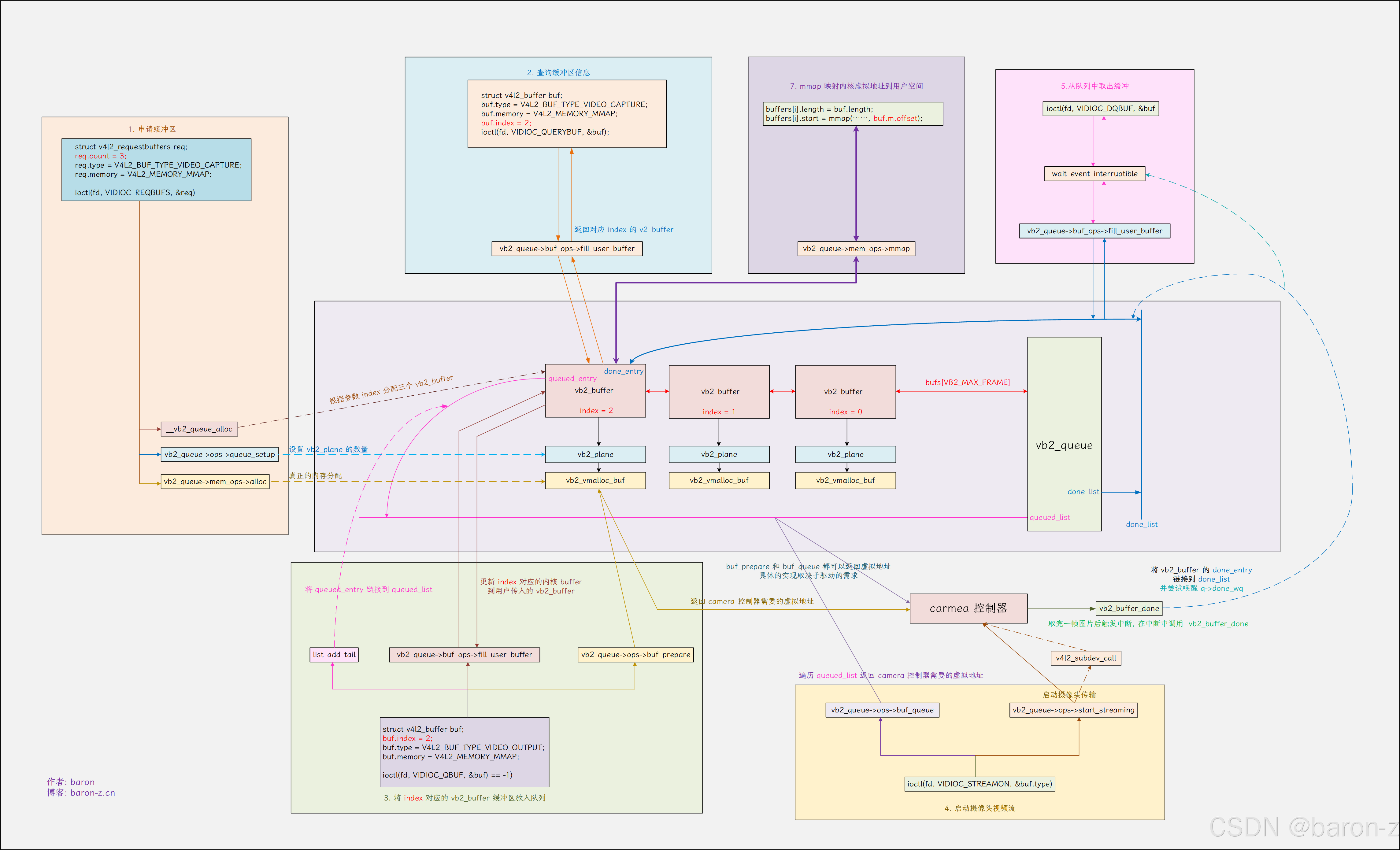
知識回顧: 每一幀圖像用一個 vb2_buffer 描述, 一幀圖像可以由一個或者多個 vb2_plane 組成, 每一個 vb2_plane 有一個 mem_priv 指向一個數據結構, 該結構用于保存實際分配的內存, videobuf2 為我們提供了一個數據結構 vb2_vmalloc_buf
驅動需要實現的接口如下:
| 接口 | 說明 |
|---|---|
| vb2_queue->ops->queue_setup | 用于確認 vb2_plane 的數量和大小。 |
| vb2_queue->mem_ops->alloc | 用于分配一幀圖像傳輸需要的內存。 |
| vb2_queue->buf_ops->fill_user_buffer | 用于將 vb2_buffer 返回給用戶空間。 |
| vb2_queue->ops->buf_prepare | 獲取前面分配的 vb2_buffer 的 vb2_plane 中虛擬地址, 把它傳給 camera 控制器,或者對 plane 做預處理。 它和 vb2_queue->ops->buf_queue 是二選其一, 如果在 buf_queue 中獲取,這里就不用獲取。 |
| vb2_queue->ops->buf_queue | 獲取前面分配的 vb2_buffer 的 vb2_plane 中虛擬地址, 把它傳給 camera 控制器。 它和 vb2_queue->ops->buf_prepare 是二選其一, 如果在 buf_prepare 中獲取,這里就不用獲取。 |
| vb2_queue->ops->start_streaming | 啟動攝像頭傳輸。如果這里使用 vb2_ioctl_streamon 系統接口則需要實現 vb2_queue->ops->start_streaming。 |
| vb2_queue->ops->start_streaming | 如果前面的 vb2_queue->ops->start_streaming 使用了 vb2_ioctl_streamon 接口則需要實現這個接口。 |
| vb2_queue->mem_ops->mmap | 用于映射內核虛擬地址到用戶空間 一般使用默認實現 vb2_vmalloc_mmap |
二、實現一個虛擬攝像頭
????有了前面的知識, 我們來逐步實現一個支持 mmap 的虛擬攝像頭.為了減少代碼的冗余, 除了第一個程序外, 后續的修改將以 patch 的形式給出. 這樣也方便觀察修改了哪些地方.
1. 最簡單的虛擬攝像頭
????首先是實現一個簡單的攝像頭驅動, 它只需要具備 /dev/videox 節點就行了.
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/uaccess.h>
#include <linux/videodev2.h>
#include <media/v4l2-device.h>static struct v4l2_device v4l2_dev;
static struct video_device vcam_vdev;static int vcam_open(struct file *file) {printk(KERN_INFO "simple_vcam: device opened\n");return 0;
}static int vcam_release(struct file *file) {printk(KERN_INFO "simple_vcam: device closed\n");return 0;
}static const struct v4l2_file_operations vcam_fops = {.owner = THIS_MODULE,.open = vcam_open,.release = vcam_release,
};static int __init vcam_init(void) {int ret;printk(KERN_INFO "simple_vcam: initializing\n");// 當第一個參數為 NULL 時必須設置 namesnprintf(v4l2_dev.name, sizeof(v4l2_dev.name), "%s", "vcam v4l2 dev");ret = v4l2_device_register(NULL, &v4l2_dev);if (ret) {printk(KERN_ERR "simple_vcam: v4l2_device_register failed\n");return ret;}// 初始化 vcam_vdevstrscpy(vcam_vdev.name, "Simple Virtual Camera", sizeof(vcam_vdev.name));vcam_vdev.v4l2_dev = &v4l2_dev; // 必須設置所屬 v4l2_devvcam_vdev.fops = &vcam_fops; // 設置 fopsvcam_vdev.release = video_device_release_empty; // 必須設置 relase 接口vcam_vdev.vfl_dir = VFL_DIR_RX;vcam_vdev.device_caps = V4L2_CAP_VIDEO_CAPTURE | V4L2_CAP_READWRITE;// 注冊 video device.ret = video_register_device(&vcam_vdev, VFL_TYPE_GRABBER, -1);if (ret) {printk(KERN_ERR "simple_vcam: video_register_device failed\n");v4l2_device_unregister(&v4l2_dev);return ret;}printk(KERN_INFO "simple_vcam: registered video device /dev/video%d\n", vcam_vdev.minor);return 0;
}static void __exit vcam_exit(void) {printk(KERN_INFO "simple_vcam: exiting\n");video_unregister_device(&vcam_vdev);v4l2_device_unregister(&v4l2_dev);
}module_init(vcam_init);
module_exit(vcam_exit);MODULE_LICENSE("GPL");
MODULE_AUTHOR("baron");
MODULE_DESCRIPTION("Simple virtual camera driver example");
驗證程序
#include <stdio.h>
#include <fcntl.h>
#include <unistd.h>int main() {int fd;// 打開設備 /dev/video9(根據實際情況可能是 /dev/videoX)fd = open("/dev/video9", O_RDWR);if (fd == -1) {perror("打開設備失敗");return -1;}printf("設備已打開成功!\n");// 關閉設備close(fd);printf("設備已關閉。\n");return 0;
}
驗證結果:
console:/cache # ./mytest
[ 1777.977139] simple_vcam: device opened
camera open
camera close
console:/cache # [ 1777.977359] simple_vcam: device closed
2. 支持查詢設備能力
驅動修改如下
Index: kernel/drivers/media/my_camera.c
===================================================================
--- kernel.orig/drivers/media/my_camera.c
+++ kernel/drivers/media/my_camera.c
@@ -6,6 +6,7 @@#include <linux/uaccess.h>#include <linux/videodev2.h>#include <media/v4l2-device.h>
+#include <media/v4l2-ioctl.h>static struct v4l2_device v4l2_dev;static struct video_device vcam_vdev;
@@ -20,8 +21,34 @@ static int vcam_release(struct file *filreturn 0;}+// 驅動需要實現 querycap 用于返回 video 信息
+// cap->driver: 設備的驅動信息
+// cap->card: 設備的名稱
+// cap->bus_info: 設備的總線信息
+static int vcam_v4l2_querycap(struct file *file, void *fh, struct v4l2_capability *cap)
+{
+ struct video_device *vdev = video_devdata(file);
+
+ strlcpy(cap->driver, "virtual_vcam", sizeof(cap->driver));
+ strlcpy(cap->card, "Virtual Camera", sizeof(cap->card));
+ strlcpy(cap->bus_info, vdev->name, sizeof(vdev->name));
+
+ cap->device_caps = V4L2_CAP_VIDEO_OUTPUT | V4L2_CAP_STREAMING;
+ cap->capabilities = cap->device_caps | V4L2_CAP_DEVICE_CAPS;
+
+ return 0;
+}
+
+const struct v4l2_ioctl_ops vcam_v4l2_ioctl_ops = {
+ .vidioc_querycap = vcam_v4l2_querycap, // 實現 vidioc_querycap 用于支持 VIDIOC_QUERYCAP
+};
+static const struct v4l2_file_operations vcam_fops = {.owner = THIS_MODULE,
+ .unlocked_ioctl = video_ioctl2, // 增加 ioctl 的支持
+#ifdef CONFIG_COMPAT
+ .compat_ioctl32 = video_ioctl2, // 增加 ioctl 的支持
+#endif.open = vcam_open,.release = vcam_release,};
@@ -43,6 +70,7 @@ static int __init vcam_init(void) {strscpy(vcam_vdev.name, "Simple Virtual Camera", sizeof(vcam_vdev.name));vcam_vdev.v4l2_dev = &v4l2_dev; // 必須設置所屬 v4l2_devvcam_vdev.fops = &vcam_fops; // 設置 fops
+ vcam_vdev.ioctl_ops = &vcam_v4l2_ioctl_ops;vcam_vdev.release = video_device_release_empty; // 必須設置 relase 接口vcam_vdev.vfl_dir = VFL_DIR_RX;vcam_vdev.device_caps = V4L2_CAP_VIDEO_CAPTURE | V4L2_CAP_READWRITE;
應用修改如下:
Index: test/test.c
===================================================================
--- test.orig/test.c
+++ test/test.c
@@ -18,6 +18,17 @@ int main() {printf("camera open\n");+ // 1. 查詢設備能力
+ struct v4l2_capability cap;
+ if (ioctl(fd, VIDIOC_QUERYCAP, &cap) == -1) {
+ perror("查詢設備能力失敗");
+ close(fd);
+ return 1;
+ }
+ printf("card: %s\n", cap.card);
+ printf("driver: %s\n", cap.driver);
+ printf("bus_info: %s\n", cap.bus_info);
+// 關閉設備close(fd);printf("camera close\n");
驗證結果:
console:/cache # ./mytest
[ 888.990438] simple_vcam: device opened
camera open
card: Virtual Camera // 打印card 信息
driver: virtual_vcam // 打印 drvier 信息
bus_info: Simple Virtual Camera // 打印總線信息
camera close
console:/cache # [ 888.996537] simple_vcam: device closed
3. 支持申請 buffer 的能力
????從前面的文章可以知道 camera 的 buffer 通過 vb2_queue 來管理, 因此我們需要添加對它的支持.
Index: kernel/drivers/media/my_camera.c
===================================================================
--- kernel.orig/drivers/media/my_camera.c
+++ kernel/drivers/media/my_camera.c
@@ -7,9 +7,15 @@#include <linux/videodev2.h>#include <media/v4l2-device.h>#include <media/v4l2-ioctl.h>
+#include <linux/spinlock.h>
+#include <media/videobuf2-core.h>
+#include <media/videobuf2-v4l2.h>
+#include <media/videobuf2-vmalloc.h>static struct v4l2_device v4l2_dev;static struct video_device vcam_vdev;
+static struct vb2_queue vcam_queue;
+static struct mutex vcam_mutex;static int vcam_open(struct file *file) {printk(KERN_INFO "simple_vcam: device opened\n");
@@ -21,7 +27,7 @@ static int vcam_release(struct file *filreturn 0;}-// 驅動需要實現 querycap 用于返回 video 信息
+// 用于支持查詢設備的能力// cap->driver: 設備的驅動信息// cap->card: 設備的名稱// cap->bus_info: 設備的總線信息
@@ -39,8 +45,41 @@ static int vcam_v4l2_querycap(struct filreturn 0;}+// 分配 buffer 時驅動的回調接口, 這里使用通用的 vb2_reqbufs 實現
+// 虛擬攝像頭這里就隨便填寫了.
+static int vcam_v4l2_reqbufs(struct file *file, void *fh, struct v4l2_requestbuffers *b)
+{
+ int ret;
+
+ if (b->type != vcam_queue.type)
+ return -EINVAL;
+
+ printk("%s\n", __func__);
+
+ ret = vb2_reqbufs(&vcam_queue, b);
+
+ return ret ? ret : b->count;
+}
+
+// V4L2_BUF_TYPE_VIDEO_CAPTURE 必須實現這個接口用于返回支持的視頻格式.
+static int vcam_v4l2_g_fmt_vid_cap(struct file *file, void *fh, struct v4l2_format *f)
+{
+ f->fmt.pix.width = 400;
+ f->fmt.pix.height = 800;
+ f->fmt.pix.pixelformat = V4L2_PIX_FMT_YUYV;
+ f->fmt.pix.field = V4L2_FIELD_NONE;
+ f->fmt.pix.bytesperline = f->fmt.pix.width * 2;
+ f->fmt.pix.sizeimage = f->fmt.pix.height * f->fmt.pix.bytesperline;
+ f->fmt.pix.colorspace = V4L2_COLORSPACE_SRGB;
+ f->fmt.pix.priv = 0;
+
+ return 0;
+}
+const struct v4l2_ioctl_ops vcam_v4l2_ioctl_ops = {
- .vidioc_querycap = vcam_v4l2_querycap, // 實現 vidioc_querycap 用于支持 VIDIOC_QUERYCAP
+ .vidioc_querycap = vcam_v4l2_querycap, // 用于返回設備信息
+ .vidioc_reqbufs = vcam_v4l2_reqbufs, // 用于支持分配 vb2_buffer
+ .vidioc_g_fmt_vid_cap = vcam_v4l2_g_fmt_vid_cap, // 用于支持返回驅動支持的視頻格式};static const struct v4l2_file_operations vcam_fops = {
@@ -53,6 +92,48 @@ static const struct v4l2_file_operations.release = vcam_release,};+// 用于設置 vb2_plane 的數量和大小
+static int vcam_queue_setup(struct vb2_queue *vq,
+ unsigned int *nbuffers, unsigned int *nplanes,
+ unsigned int sizes[], struct device *alloc_devs[])
+{
+ printk("%s\n", __func__);
+ *nplanes = 1; // 設置數量
+ sizes[0] = 800*400; // 設置大小
+ return 0;
+}
+
+static void vcam_buffer_queue(struct vb2_buffer *vb)
+{
+ printk("%s\n", __func__);
+}
+
+static struct vb2_ops vcam_queue_qops = {
+ .queue_setup = vcam_queue_setup, // 用于設置 vb2_plane 的數量和大小
+ .buf_queue = vcam_buffer_queue, // 必須實現
+};
+
+// 初始化 vb2_queue
+int vcam_queue_init(struct vb2_queue *queue, enum v4l2_buf_type type,
+ struct mutex *lock)
+{
+ int ret;
+
+ queue->type = type;
+ queue->io_modes = VB2_MMAP | VB2_USERPTR | VB2_DMABUF;
+ queue->ops = &vcam_queue_qops;
+ queue->lock = lock;
+ queue->mem_ops = &vb2_vmalloc_memops;
+ queue->timestamp_flags = V4L2_BUF_FLAG_TIMESTAMP_MONOTONIC
+ | V4L2_BUF_FLAG_TSTAMP_SRC_EOF;
+
+ ret = vb2_queue_init(queue);
+ if (ret)
+ return ret;
+
+ return 0;
+}
+static int __init vcam_init(void) {int ret;@@ -83,6 +164,9 @@ static int __init vcam_init(void) {return ret;}+ // 初始化 vb2_queue
+ vcam_queue_init(&vcam_queue, V4L2_BUF_TYPE_VIDEO_CAPTURE, &vcam_mutex);
+printk(KERN_INFO "simple_vcam: registered video device /dev/video%d\n", vcam_vdev.minor);return 0;}
應用程序修改.
Index: test/test.c
===================================================================
--- test.orig/test.c
+++ test/test.c
@@ -29,6 +29,19 @@ int main() {printf("driver: %s\n", cap.driver);printf("bus_info: %s\n", cap.bus_info);+ // 2. 申請緩沖區
+ struct v4l2_requestbuffers req;
+ req.count = 3;
+ req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
+ req.memory = V4L2_MEMORY_MMAP;
+ if (ioctl(fd, VIDIOC_REQBUFS, &req) == -1) {
+ perror("申請緩沖區失敗");
+ close(fd);
+ return 1;
+ }
+
+ printf("alloc 3 buffer\n");
+// 關閉設備close(fd);printf("camera close\n");
驗證結果:
console:/cache # ./mytest
[ 785.535608] simple_vcam: device opened
camera open
card: Virtual Camera
driver: virtual_vcam
bus_info: Simple Virtual Camera
alloc 3 buffer
camera close
[ 785.541709] vcam_v4l2_reqbufs
[ 785.541882] vcam_queue_setup
[ 785.543306] simple_vcam: device closed
4. 支持查詢緩沖區信息
????這個驅動需要添加對 vidioc_querybuf 的支持.
Index: kernel/drivers/media/my_camera.c
===================================================================
--- kernel.orig/drivers/media/my_camera.c
+++ kernel/drivers/media/my_camera.c
@@ -76,10 +76,17 @@ static int vcam_v4l2_g_fmt_vid_cap(strucreturn 0;}+// 添加驅動用于支持查詢緩沖區信息的功能
+static int vcam_v4l2_querybuf(struct file *file, void *fh, struct v4l2_buffer *b)
+{
+ return vb2_querybuf(&vcam_queue, b);
+}
+const struct v4l2_ioctl_ops vcam_v4l2_ioctl_ops = {.vidioc_querycap = vcam_v4l2_querycap, // 用于返回設備信息.vidioc_reqbufs = vcam_v4l2_reqbufs, // 用于支持分配 vb2_buffer.vidioc_g_fmt_vid_cap = vcam_v4l2_g_fmt_vid_cap, // 用于支持返回驅動支持的視頻格式
+ .vidioc_querybuf = vcam_v4l2_querybuf, // 添加驅動用于支持查詢緩沖區信息的功能};static const struct v4l2_file_operations vcam_fops = {
應用程序
Index: test/test.c
===================================================================
--- test.orig/test.c
+++ test/test.c
@@ -42,6 +42,18 @@ int main() {printf("alloc 3 buffer\n");+ // 3. 查詢緩沖區信息
+ struct v4l2_buffer buf;
+ buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
+ buf.memory = V4L2_MEMORY_MMAP;
+ buf.index = 0;
+ if (ioctl(fd, VIDIOC_QUERYBUF, &buf) == -1) {
+ perror("查詢緩沖區信息失敗");
+ close(fd);
+ return 1;
+ }
+ printf("緩沖區大小: %u bytes\n", buf.length);
+// 關閉設備close(fd);printf("camera close\n");
驗證結果
console:/cache # ./mytest
[ 182.823177] simple_vcam: device opened
camera open
card: Virtual Camera
driver: virtual_vcam
bus_info: Simple Virtual Camera
緩沖區大小: 320000 bytes // 計算一下 800x400 = 320000
alloc 3 buffer
camera close
[ 182.829223] vcam_v4l2_reqbufs
[ 182.829240] vcam_queue_setup
[ 182.833253] simple_vcam: device closed
5. 支持 mmap 功能
Index: kernel/drivers/media/my_camera.c
===================================================================
--- kernel.orig/drivers/media/my_camera.c
+++ kernel/drivers/media/my_camera.c
@@ -89,13 +89,20 @@ const struct v4l2_ioctl_ops vcam_v4l2_io.vidioc_querybuf = vcam_v4l2_querybuf, // 添加驅動用于支持查詢緩沖區信息的功能};+// 添加對 mmap 的支持
+static int vcam_v4l2_mmap(struct file *file, struct vm_area_struct *vma)
+{
+ return vb2_mmap(&vcam_queue, vma);
+}
+static const struct v4l2_file_operations vcam_fops = {.owner = THIS_MODULE,
+ .open = vcam_open,.unlocked_ioctl = video_ioctl2, // 增加 ioctl 的支持#ifdef CONFIG_COMPAT.compat_ioctl32 = video_ioctl2, // 增加 ioctl 的支持#endif
- .open = vcam_open,
+ .mmap = vcam_v4l2_mmap, // 添加對 mmap 的支持.release = vcam_release,};
應用程序:
Index: test/test.c
===================================================================
--- test.orig/test.c
+++ test/test.c
@@ -5,6 +5,7 @@#include <sys/ioctl.h>#include <linux/videodev2.h>#include <errno.h>
+#include <sys/mman.h>int main() {int fd;
@@ -54,6 +55,16 @@ int main() {}printf("緩沖區大小: %u bytes\n", buf.length);+ // 4. mmap 映射內存
+ void *buffer_start;
+ buffer_start = mmap(NULL, buf.length, PROT_READ | PROT_WRITE, MAP_SHARED, fd, buf.m.offset);
+ if (buffer_start == MAP_FAILED) {
+ perror("mmap");
+ exit(EXIT_FAILURE);
+ }
+
+ printf("mmap camera bufer %p\n", buffer_start);
+// 關閉設備close(fd);printf("camera close\n");
驗證結果:
console:/cache # ./mytest
[ 55.868859] simple_vcam: device opened
camera open
card: Virtual Camera
driver: virtual_vcam
bus_info: Simple Virtual Camera
alloc 3 buffer
緩沖區大小: 320000 bytes
mmap camera bufer 0x78780ac000 // 映射內存
camera close
[ 55.874932] vcam_v4l2_reqbufs
[ 55.874953] vcam_queue_setup
[ 55.884138] simple_vcam: device closed
6. 支持將隊列放入緩沖區
????我們在將 buffer 放入緩沖區前, 先給他寫入 “hello vcam this is user” 然后在內核中打印出我們的修改.
Index: kernel/drivers/media/my_camera.c
===================================================================
--- kernel.orig/drivers/media/my_camera.c
+++ kernel/drivers/media/my_camera.c
@@ -16,6 +16,8 @@ static struct v4l2_device v4l2_dev;static struct video_device vcam_vdev;static struct vb2_queue vcam_queue;static struct mutex vcam_mutex;
+static void *vcam_mem;
+static unsigned int length;static int vcam_open(struct file *file) {printk(KERN_INFO "simple_vcam: device opened\n");
@@ -87,6 +89,7 @@ const struct v4l2_ioctl_ops vcam_v4l2_io.vidioc_reqbufs = vcam_v4l2_reqbufs, // 用于支持分配 vb2_buffer.vidioc_g_fmt_vid_cap = vcam_v4l2_g_fmt_vid_cap, // 用于支持返回驅動支持的視頻格式.vidioc_querybuf = vcam_v4l2_querybuf, // 添加驅動用于支持查詢緩沖區信息的功能
+ .vidioc_qbuf = vb2_ioctl_qbuf, // 用于支持將緩沖區放入隊列};// 添加對 mmap 的支持
@@ -122,9 +125,23 @@ static void vcam_buffer_queue(struct vb2printk("%s\n", __func__);}+
+// 獲取前面分配的 buffer 的虛擬地址
+// 打印出用戶的修改, 這里應該能打印 "hello vcam this is user"
+static int vcam_buffer_prepare(struct vb2_buffer *vb)
+{
+ vcam_mem = vb2_plane_vaddr(vb, 0);
+ length = vb2_plane_size(vb, 0);
+
+ printk("vcam_mem: %s, length:%d\n", (char*)vcam_mem, length);
+
+ return 0;
+}
+static struct vb2_ops vcam_queue_qops = {.queue_setup = vcam_queue_setup, // 用于設置 vb2_plane 的數量和大小.buf_queue = vcam_buffer_queue, // 必須實現
+ .buf_prepare = vcam_buffer_prepare, // 用于獲取前面分配的 buffer 的虛擬地址};// 初始化 vb2_queue
@@ -179,6 +196,7 @@ static int __init vcam_init(void) {}// 初始化 vb2_queue
+ vcam_vdev.queue = &vcam_queue; // vb2_ioctl_qbuf 需要把 queue 綁定到 video_devicevcam_queue_init(&vcam_queue, V4L2_BUF_TYPE_VIDEO_CAPTURE, &vcam_mutex);printk(KERN_INFO "simple_vcam: registered video device /dev/video%d\n", vcam_vdev.minor);
應用程序修改
Index: test/test.c
===================================================================
--- test.orig/test.c
+++ test/test.c
@@ -6,6 +6,7 @@#include <linux/videodev2.h>#include <errno.h>#include <sys/mman.h>
+#include <string.h>int main() {int fd;
@@ -65,6 +66,18 @@ int main() {printf("mmap camera bufer %p\n", buffer_start);+ // 往映射內存中寫入數據
+ const char *msg = "hello vcam this is user";
+ memcpy(buffer_start, msg, strlen(msg) + 1);
+
+ printf("write %s to kernel\n", (char*)buffer_start);
+
+ if (ioctl(fd, VIDIOC_QBUF, &buf) == -1) {
+ perror("將緩沖區放入隊列失敗");
+ close(fd);
+ return 1;
+ }
+// 關閉設備close(fd);printf("camera close\n")
驗證結果:
console:/cache # ./mytest
[ 33.442391] simple_vcam: decvaimceer ao poepneendcard: Virtual Camera
driver: virtual_vcam
bus_info: Simple Virtual Camera
alloc 3 buffer
緩沖區大小: 320000 bytes
mmap camera bufer 0x7ef2c21000
write hello vcam this is user to kernel // 應用打印
camera close
[ 33.448609] vcam_queue_setup
[ 33.458952] vcam_mem: hello vcam this is user, length:320000 // 在內核中打印出應用寫入的數據.
[ 33.461500] simple_vcam: device closed
7. 添加啟動視頻流功能
????添加啟動視頻流的功能, 并且在啟動的時候, 模擬 sensor 處理完視頻并提交這幀. 模擬的方式很簡單就是往 mem 中寫入 “hello vcam this is kernel”
Index: kernel/drivers/media/my_camera.c
===================================================================
--- kernel.orig/drivers/media/my_camera.c
+++ kernel/drivers/media/my_camera.c
@@ -90,6 +90,7 @@ const struct v4l2_ioctl_ops vcam_v4l2_io.vidioc_g_fmt_vid_cap = vcam_v4l2_g_fmt_vid_cap, // 用于支持返回驅動支持的視頻格式.vidioc_querybuf = vcam_v4l2_querybuf, // 添加驅動用于支持查詢緩沖區信息的功能.vidioc_qbuf = vb2_ioctl_qbuf, // 用于支持將緩沖區放入隊列
+ .vidioc_streamon = vb2_ioctl_streamon, // 使用標準的 vb2_ioctl_streamon 接口};// 添加對 mmap 的支持
@@ -138,10 +139,36 @@ static int vcam_buffer_prepare(struct vbreturn 0;}+// 直接在 steram on 中 模擬數據采集完成
+static int vcam_start_streaming(struct vb2_queue *vq, unsigned int count)
+{
+ struct vb2_buffer *vb;
+ void *mem;
+
+ if (list_empty(&vq->queued_list)) {
+ printk("vcam: queued_list is empty, cannot start streaming\n");
+ return 0;
+ }
+
+ vb = list_first_entry(&vq->queued_list, struct vb2_buffer, queued_entry);
+
+ // 模擬采集過程, 這里直接修改 buffer 內容
+ mem = vb2_plane_vaddr(vb, 0);
+ memcpy(mem, "hello vcam this is kernel", strlen("hello vcam this is kernel") + 1);
+
+ // 采集完成將 buffer 放到 vb2_queue->done_list 鏈表
+ vb2_buffer_done(vb, VB2_BUF_STATE_DONE); // 將 buffer 放到完成鏈表
+
+ printk("%s change mem to %s\n", __func__, (char*)mem);
+
+ return 0;
+}
+static struct vb2_ops vcam_queue_qops = {.queue_setup = vcam_queue_setup, // 用于設置 vb2_plane 的數量和大小.buf_queue = vcam_buffer_queue, // 必須實現.buf_prepare = vcam_buffer_prepare, // 用于獲取前面分配的 buffer 的虛擬地址
+ .start_streaming = vcam_start_streaming, // vb2_ioctl_streamon 的后續接口, 這個是真正的 stream on 接口};
應用修改:
Index: test/test.c
===================================================================
--- test.orig/test.c
+++ test/test.c
@@ -72,12 +72,22 @@ int main() {printf("write %s to kernel\n", (char*)buffer_start);+ // 5. 將緩沖區放入隊列if (ioctl(fd, VIDIOC_QBUF, &buf) == -1) {perror("將緩沖區放入隊列失敗");close(fd);return 1;}+ // 6. 啟動視頻流
+ if (ioctl(fd, VIDIOC_STREAMON, &buf.type) == -1) {
+ perror("啟動視頻流失敗");
+ close(fd);
+ return 1;
+ }
+
+ printf("vcam stream on\n");
+// 關閉設備close(fd);printf("camera close\n");
驗證結果:
console:/cache # ./mytest
[ 51.017063] simple_vcam: device opened
camera open
card: Virtual Camera
driver: virtual_vcam
bus_info: Simple Virtual Camera
alloc 3 buffer
緩沖區大小: 320000 bytes
mmap camera bufer 0x7a81864000
write hello vcam this is user to kernel
vcam stream on // 啟動攝像頭
camera close
[ 51.023179] vcam_queue_setup
[ 51.033537] vcam_mem: hello vcam this is user, length:320000
[ 51.033591] vcam_start_streaming change mem to hello vcam this is kernel // 將 mem 的內容該成 hello vcam this is kernel
[ 51.037391] simple_vcam: device closed8. 從隊列中取出緩沖
Index: kernel/drivers/media/my_camera.c
===================================================================
--- kernel.orig/drivers/media/my_camera.c
+++ kernel/drivers/media/my_camera.c
@@ -91,6 +91,7 @@ const struct v4l2_ioctl_ops vcam_v4l2_io.vidioc_querybuf = vcam_v4l2_querybuf, // 添加驅動用于支持查詢緩沖區信息的功能.vidioc_qbuf = vb2_ioctl_qbuf, // 用于支持將緩沖區放入隊列.vidioc_streamon = vb2_ioctl_streamon, // 使用標準的 vb2_ioctl_streamon 接口
+ .vidioc_dqbuf = vb2_ioctl_dqbuf, // 使用標準的 vb2_ioctl_dqbuf 接口};// 添加對 mmap 的支持
@@ -169,6 +170,8 @@ static struct vb2_ops vcam_queue_qops =.buf_queue = vcam_buffer_queue, // 必須實現.buf_prepare = vcam_buffer_prepare, // 用于獲取前面分配的 buffer 的虛擬地址.start_streaming = vcam_start_streaming, // vb2_ioctl_streamon 的后續接口, 這個是真正的 stream on 接口
+ .wait_prepare = vb2_ops_wait_prepare, // 使用標準接口加鎖
+ .wait_finish = vb2_ops_wait_finish, // 使用標準接口解鎖};// 初始化 vb2_queue
應用修改
Index: test/test.c
===================================================================
--- test.orig/test.c
+++ test/test.c
@@ -88,6 +88,14 @@ int main() {printf("vcam stream on\n");+ if (ioctl(fd, VIDIOC_DQBUF, &buf) == -1) {
+ perror("從隊列中取出緩沖區失敗");
+ close(fd);
+ return 1;
+ }
+
+ printf("%s\n", (char*)buffer_start);
+// 關閉設備close(fd);printf("camera close\n");
驗證結果:
console:/cache # ./mytest
[ 99.390015] simple_vcam: device opened
camera open
card: Virtual Camera
driver: virtual_vcam
bus_info: Simple Virtual Camera
alloc 3 buffer
緩沖區大小: 320000 bytes
mmap camera bufer 0x741ca9f000
write hello vcam this is user to kernel
vcam stream on
hello vcam this is kernel // 內核讀出處理過后的 buffer
camera close
[ 99.396111] vcam_queue_setup
[ 99.406462] vcam_mem: hello vcam this is user, length:320000
[ 99.406512] vcam_start_streaming change mem to hello vcam this is kernel // 修改 buffer
[ 99.412631] simple_vcam: device closed
三、/dev/subdevX
????/dev/v4l-subd1evX 設備, 用于管理和配資子設備, sensor 的寄存器初始化等操作、 isp (Image Signal Processor)、視頻編碼器/解碼器、橋接芯片(bridge). 他和 video 設備配合使用.
// 可以是一對一的
攝像頭設備(/dev/videoX)│└── subdevX (sensor)// 也可以是一對多的
攝像頭設備(/dev/videoX)│├── subdev0 (Sensor傳感器)├── subdev1 (ISP處理芯片)└── subdev2 (鏡頭控制器,VCM模塊)
????/dev/v4l-subd1evX 設備本質上也是通過一個字符設備的一系列 ioctl 來控制的. 為什么要單獨抽取出來, 而不直接放到流處理部分中呢? 這是為了方便驅動的移植, 因為 /dev/video 流處理部分是通用的, 所有攝像頭都會用到. 為減少代碼冗余, 就將與攝像頭控制器強耦合的部分單獨抽取出來, 這部分由芯片廠家實現. 而 sensor 部分則通過 subdev 獨立實現, 這樣移植新 sensor 時, 只需更換對應的 subdev 即可. 整體框架如下圖所示:
從上圖中也可以看出 /dev/videox 和 /dev/subdevx 由 v4l2_device 統一管理.
注: 圖中只畫了一個 subdev 是因為圖片大小限制, 一個vdieo 右邊可以掛多個subdev.
1. subdev 的接口
????注冊的接口有兩個. 第一個接口 v4l2_device_register_subdev 接口很簡單, 用于將 subdev->list 鏈接到所屬的 v4l2_dev->subdevs. 第二個接口 v4l2_device_register_subdev_nodes 接口的功能如下.
- 遍歷 v4l2_dev->subdevs 上的 subdev 為每一個沒有注冊的設備創建一個 video_device 并注冊進內核.
- 設置對應的 video_device 的 fops 為 v4l2_subdev_fops, ioctl 的不同就是 /dev/subdev 設備 和 /dev/video 設備的核心差異點.
const struct v4l2_file_operations v4l2_subdev_fops = {.owner = THIS_MODULE,.open = subdev_open,.unlocked_ioctl = subdev_ioctl, // 對于 video 設備這里是 video_ioctl2
#ifdef CONFIG_COMPAT.compat_ioctl32 = subdev_compat_ioctl32,
#endif.release = subdev_close,.poll = subdev_poll,
};
EXPORT_SYMBOL_GPL(v4l2_subdev_fops);
????如下所示為 gc5035 攝像頭的驅動實現.
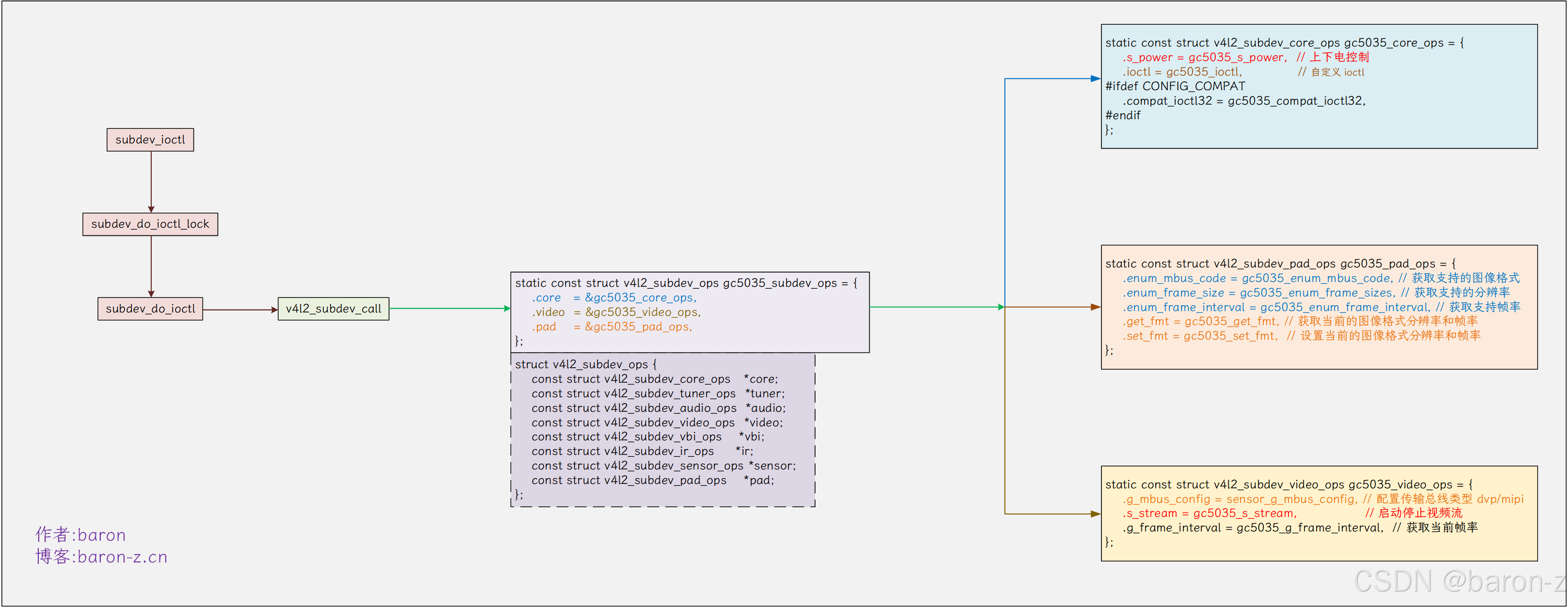
????到這里我們就可以發現, subdev 的核心就是一堆回調函數.
struct v4l2_subdev_ops {const struct v4l2_subdev_core_ops *core; // 核心接口上下電等const struct v4l2_subdev_tuner_ops *tuner;const struct v4l2_subdev_audio_ops *audio;const struct v4l2_subdev_video_ops *video; // 視頻相關的接口, 啟動停止視頻流等const struct v4l2_subdev_vbi_ops *vbi;const struct v4l2_subdev_ir_ops *ir;const struct v4l2_subdev_sensor_ops *sensor;const struct v4l2_subdev_pad_ops *pad; // pad 相關接口支持的分變率等.
};
????sensor 支持什么就添加什么接口, 然后通過 v4l2_subdev_call 調用該接口. 驅動可以直接通過 v4l2_subdev_call 調用 subdev 支持的接口.
#define v4l2_subdev_call(sd, o, f, args...) \({ \int __result; \if (!(sd)) \__result = -ENODEV; \else if (!((sd)->ops->o && (sd)->ops->o->f)) \__result = -ENOIOCTLCMD; \else \__result = (sd)->ops->o->f((sd), ##args); \__result; \})
例如我們想要調用上圖中的 gc5035_s_stream 啟動視頻流接口. 我們先看驅動的實現.
static const struct v4l2_subdev_video_ops gc5035_video_ops = {.s_stream = gc5035_s_stream, // 對應的 s_stream 接口
};static const struct v4l2_subdev_ops gc5035_subdev_ops = {.vido = &gc5035_core_ops, // 對應的 video 接口
};
于是我們就可以使用以下接口調用 gc5035_s_stream
v4l2_subdev_call(gc5035_subdev, video, s_stream, 1); // 傳入 1 啟動視頻流
subdev 總體上來說比較簡單
- 首先通過 v4l2_device_register_subdev 添加到所屬的 v4l2_dev
- 然后使用 v4l2_device_register_subdev_nodes 注冊 v4l2_dev 上的所有 subdev.
- 最后通過 v4l2_subdev_call 調用 subdev 提供的接口.
2. 實現簡單的 subdev 驅動
????假設我們有以下攝像頭硬件鏈路, 有兩個sensor, sensor_A 和 sensor_B. 數據通過 csi 控制器后輸入到 isp.
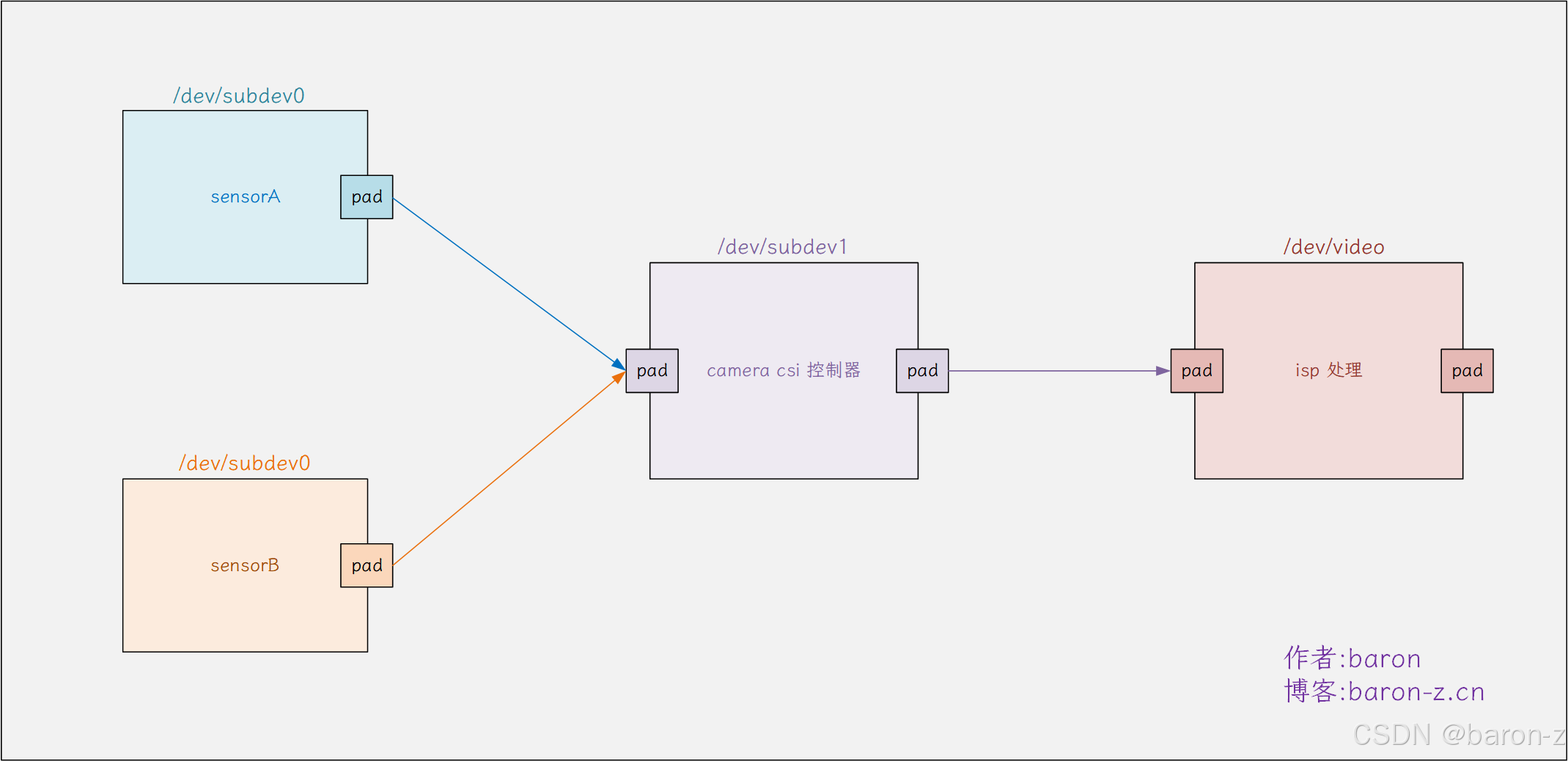
????如果我們就需要實現三個 subdev 驅動, 分別用于描述 sensor_A 、sensorB、csi 控制器.
1) 注冊三個 subdev
????注冊 sensor_A 、sensorB、csi 控制器. 對應的 subdev, 本文的目的只是為了展示原理, 代碼做錯誤處理, 以及只保留一個最簡單的功能. 正常情況下分別對應三個驅動程序, 這里我就放到一起了.
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/uaccess.h>
#include <linux/videodev2.h>
#include <media/v4l2-device.h>
#include <media/v4l2-ioctl.h>
#include <linux/spinlock.h>
#include <media/videobuf2-core.h>
#include <media/videobuf2-v4l2.h>
#include <media/videobuf2-vmalloc.h>
#include <media/media-entity.h>extern struct v4l2_device my_v4l2_dev;static int sensor_s_stream(struct v4l2_subdev *sd, int on)
{printk("%s: %s stream %s\n", __func__, sd->name, on ? "on" : "off");return 0;
}static const struct v4l2_subdev_video_ops sensor_video_ops = {.s_stream = sensor_s_stream,
};static struct v4l2_subdev_ops sensor_ops = {.video = &sensor_video_ops,
};struct v4l2_subdev* my_sensor_register(const char *name)
{struct v4l2_subdev *sd;int ret;sd = kzalloc(sizeof(*sd), GFP_KERNEL);v4l2_subdev_init(sd, &sensor_ops);sd->owner = THIS_MODULE;sd->flags = V4L2_SUBDEV_FL_HAS_DEVNODE;strscpy(sd->name, name, sizeof(sd->name));ret = v4l2_device_register_subdev(&my_v4l2_dev, sd);ret = v4l2_device_register_subdev_nodes(&my_v4l2_dev);return sd;
}static int __init sensor_module_init(void)
{struct v4l2_subdev *sensor_A;struct v4l2_subdev *sensor_B;struct v4l2_subdev *csi_control;sensor_A = my_sensor_register("sensor_A");sensor_B = my_sensor_register("sensor_B");csi_control = my_sensor_register("csi_control");return 0;
}module_init(sensor_module_init);MODULE_LICENSE("GPL");
MODULE_AUTHOR("baron");
MODULE_DESCRIPTION("V4L2 subdev example");
2) 注冊 isp 對應的 video
????同樣代碼只做展示, 這這里我只保留了 stream_on 的功能.
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/uaccess.h>
#include <linux/videodev2.h>
#include <media/v4l2-device.h>
#include <media/v4l2-ioctl.h>
#include <linux/spinlock.h>
#include <media/videobuf2-core.h>
#include <media/videobuf2-v4l2.h>
#include <media/videobuf2-vmalloc.h>struct v4l2_device my_v4l2_dev;
EXPORT_SYMBOL_GPL(my_v4l2_dev);static struct media_device media_dev;struct video_device isp_vdev;
EXPORT_SYMBOL_GPL(isp_vdev);struct v4l2_subdev *get_remote_sensor(struct media_pad *local)
{struct media_pad *remote;remote = media_entity_remote_pad(local);return media_entity_to_v4l2_subdev(remote->entity);
}
EXPORT_SYMBOL_GPL(get_remote_sensor);static int isp_open(struct file *file)
{printk("simple_isp: device opened\n");return 0;
}static int isp_release(struct file *file)
{printk("simple_isp: device closed\n");return 0;
}static int isp_v4l2_streamon(struct file *file, void *fh, enum v4l2_buf_type type)
{struct video_device *vdev = video_devdata(file);struct v4l2_subdev * remote_sub;printk("%s\n", __func__);remote_sub = get_remote_sensor(&vdev->entity.pads[0]);v4l2_subdev_call(remote_sub, video, s_stream, 1);return 0;
}const struct v4l2_ioctl_ops isp_v4l2_ioctl_ops = {.vidioc_streamon = isp_v4l2_streamon,
};static const struct v4l2_file_operations isp_fops = {.owner = THIS_MODULE,.open = isp_open,.unlocked_ioctl = video_ioctl2,
#ifdef CONFIG_COMPAT.compat_ioctl32 = video_ioctl2,
#endif.release = isp_release,
};static struct media_pad isp_pads[1] = {{.flags = MEDIA_PAD_FL_SINK,},
};static int __init isp_init(void) {int ret;printk("gsimple_isp: initializing\n");// 當第一個參數為 NULL 時必須設置 namesnprintf(my_v4l2_dev.name, sizeof(my_v4l2_dev.name), "%s", "isp v4l2 dev");ret = v4l2_device_register(NULL, &my_v4l2_dev);if (ret) {printk("simple_isp: v4l2_device_register failed\n");return ret;}// 初始化 isp_vdevstrscpy(isp_vdev.name, "Simple Virtual Camera", sizeof(isp_vdev.name));isp_vdev.v4l2_dev = &my_v4l2_dev; // 必須設置所屬 v4l2_devisp_vdev.fops = &isp_fops; // 設置 fopsisp_vdev.ioctl_ops = &isp_v4l2_ioctl_ops;isp_vdev.release = video_device_release_empty; // 必須設置 relase 接口isp_vdev.vfl_dir = VFL_DIR_RX;isp_vdev.device_caps = V4L2_CAP_VIDEO_CAPTURE | V4L2_CAP_READWRITE;isp_vdev.entity.function = MEDIA_ENT_F_CAM_SENSOR;ret = media_entity_pads_init(&isp_vdev.entity, 1, isp_pads);my_v4l2_dev.mdev = &media_dev;// 這個要在 video_register_device 前面snprintf(media_dev.model, sizeof(media_dev.model), "My Virtual Media Device");snprintf(media_dev.driver_name, sizeof(media_dev.driver_name), "My Virtual driver");snprintf(media_dev.serial, sizeof(media_dev.serial), "My Virtual serial");snprintf(media_dev.bus_info, sizeof(media_dev.bus_info), "My Virtual bus_info");media_device_init(&media_dev);ret = media_device_register(&media_dev);if (ret) {pr_err("media_device_register failed\n");return ret;}// 注冊 video device.ret = video_register_device(&isp_vdev, VFL_TYPE_GRABBER, -1);if (ret) {printk("simple_isp: video_register_device failed\n");return ret;}printk("gsimple_isp: registered video device /dev/video%d\n", isp_vdev.minor);return 0;
}module_init(isp_init);MODULE_LICENSE("GPL");
MODULE_AUTHOR("baron");
MODULE_DESCRIPTION("Simple virtual camera driver example");
注冊完之后可以在系統中找到這些設備.
console:/ # cat /sys/class/video4linux/v4l-subdev0/name
sensor_A // sensor_A 設備
console:/ # cat /sys/class/video4linux/v4l-subdev1/name
sensor_B // sensor_B 設備
console:/ # cat /sys/class/video4linux/v4l-subdev2/name
isp conrtol // sensor_C 設備
console:/ # cat /sys/class/video4linux/video9/name
Simple Virtual Camera
四、media controller
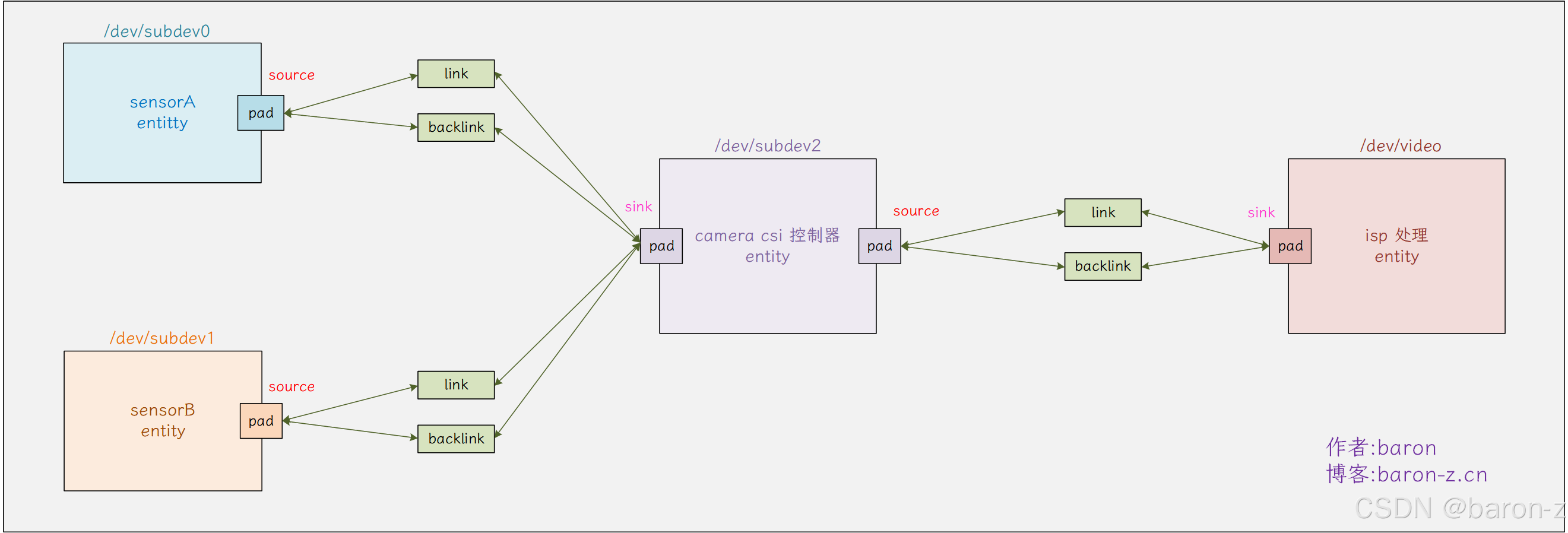
????前面我們模擬了一個簡單的攝像頭鏈路, 由sensor_A 、sensorB、csi 控制器 以及 isp video. 組成, 我們為他們創建了對應的設備. 現在引入一個問題: 只有一個 csi 控制器, 但是有兩個 sensor 輸入, 我們希望組成如下圖的鏈路狀態我們應該怎么實現.
????當然我們可以在驅動寫死, 如果我們一開始就知道硬件鏈接的話. 然而實際芯片的鏈路往往更加復雜, 可能存在多個csi控制器, isp 處理后有多個輸出. 有沒有一種方法可以動態的鏈接這些鏈路. 于是 v4l2 中的 media controller(MC) 框架閃亮登場. media controller(MC) 允許用戶空間獲取 v4l2_device 下的硬件設備信息, 以及對他們進行動態的管理.
1. media controller 的核心組件
????media controller(MC)的核心組件有三個 entity、pad 以及 link 組成.這些組件由 media_deivce 進行統一的管理, 如下圖所示.
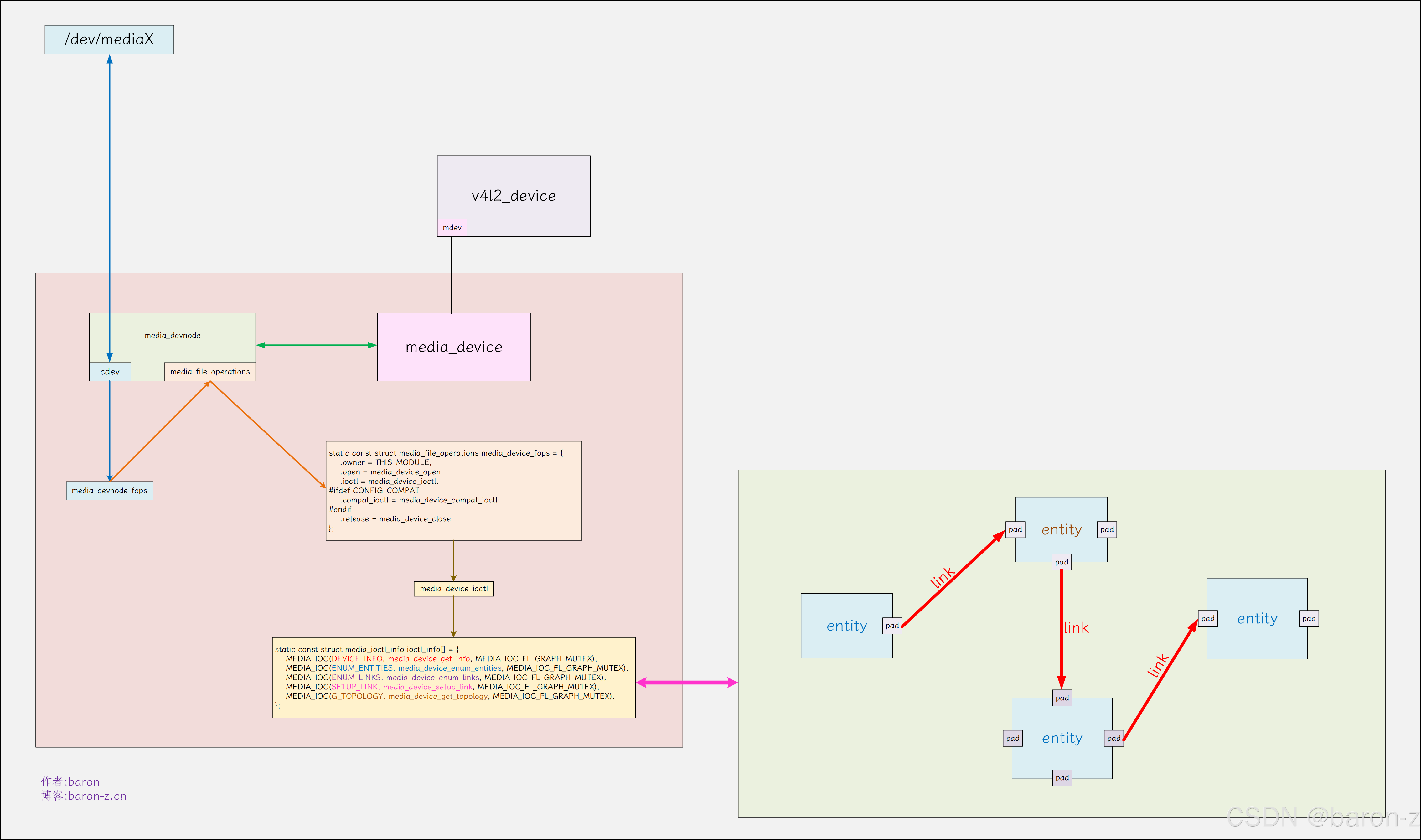
????media controller(MC) 的本質也是一個字符設備, 提供了一組 ioctl 對 entity 等組件進行管理.
1) media_device
????media_device 向提供一個 cdev 字符設備, 用于用戶空間與內核空間的 entity、pad、link 組件進行交互和管理. 它包括流媒體設備的整體描述, 以下描述字段是需要提供的.
| 字段 | 作用 |
|---|---|
| media_devce.model[32] | 標識設備的硬件型號名稱 (如"USB Camera Model X") |
| media_devce.driver_name[32] | 表示控制該設備的內核驅動名稱(如"uvcvideo") |
| media_devce.serial[40] | 存儲設備的唯一序列號,用于區分同型號的不同設備。 |
| media_devce.bus_info[32] | 描述設備的總線連接信息(如"usb-3-2.4"),指明設備的物理連接位置 |
????media_device 通過 media_device_init 接口初始化然后通過 media_device_register 接口進行注冊. 下面偽代碼展示了注冊流程, 注意 media_device 由 v4l2_dev 進行管理必須設置所屬的 v4l2_dev.
v4l2_dev.mdev = &media_dev; // media device 由 v4l2_dev 進行管理必須設置所屬的 v4l2_dev// 設置 media device 的基本信息snprintf(media_dev.model, sizeof(media_dev.model), "My Virtual Media Device");snprintf(media_dev.driver_name, sizeof(media_dev.driver_name), "My Virtual driver");snprintf(media_dev.serial, sizeof(media_dev.serial), "My Virtual serial");snprintf(media_dev.bus_info, sizeof(media_dev.bus_info), "My Virtual bus_info");media_device_init(&media_dev); // 初始化ret = media_device_register(&media_dev); // 注冊
2) entity 組件
????需要鏈接的對象,比如我們的sensor_A 、sensorB、csi 控制器以及 isp vido 模塊.當我們需要它作為鏈接對象時, 我們只需要內嵌 entity 就行了. subdev 和 video_device 已經幫我們嵌入了這個結構. 我們只需要在 kernel 中配置 CONFIG_MEDIA_CONTROLLER 這個宏就行了.
struct v4l2_subdev {
#if defined(CONFIG_MEDIA_CONTROLLER)struct media_entity entity; // 內嵌 entity 用于支持 media controller
#endif
// ......
}struct video_device {
#if defined(CONFIG_MEDIA_CONTROLLER)struct media_entity entity; // 內嵌 entity 用于支持 media controllerstruct media_intf_devnode *intf_devnode;struct media_pipeline pipe;
#endif
// ......
????通過接口 media_device_register_entity 進行注冊, 同樣的對于 subdev 和 video_device 內核已經提供了對它的支持.
// subdev 的支持
v4l2_device_register_subdev() -->#if defined(CONFIG_MEDIA_CONTROLLER) // 通過宏 CONFIG_MEDIA_CONTROLLER 控制media_device_register_entity()-->#endif// video device 的支持
__video_register_device() -->video_register_media_controller() -->#if defined(CONFIG_MEDIA_CONTROLLER) // 通過宏 CONFIG_MEDIA_CONTROLLER 控制ret = media_device_register_entity(vdev->v4l2_dev->mdev, &vdev->entity);#endif
entity 通過 function 用于描述不同的 entity 的功能, 對于攝像頭內核提供以下的 function
#define MEDIA_ENT_F_CAM_SENSOR (MEDIA_ENT_F_OLD_SUBDEV_BASE + 1)
#define MEDIA_ENT_F_FLASH (MEDIA_ENT_F_OLD_SUBDEV_BASE + 2)
#define MEDIA_ENT_F_LENS (MEDIA_ENT_F_OLD_SUBDEV_BASE + 3)
#define MEDIA_ENT_F_TUNER (MEDIA_ENT_F_OLD_SUBDEV_BASE + 5)
在注冊前我們需要設置 function, 如下面偽代碼
static struct v4l2_subdev sensorA_sd;
int xxx_init(void)
{// 設置 MEDIA_ENT_F_CAM_SENSOR 攝像頭常用的 functionsensorA_sd.entity.function = MEDIA_ENT_F_CAM_SENSOR;// 注冊 v4l2_subdev 的時候就幫我們注冊了 v4l2_devret = v4l2_device_register_subdev(&v4l2_dev, &sensorA_sd);
}
3) pad 組件
????entity 所描述的實體設備上面的端口. 每一個 entity 上面有一個到多個端口(pad), 端口的數量是固定好的存放與 entity->pads 數組中.數據結構如下所示
struct media_pad {struct media_gobj graph_obj; // 用于管理 padstruct media_entity *entity; // 所屬 entityu16 index; // entity->pads 中對應的數組下標unsigned long flags; // pad 狀態標志
};
????pad 中 index 表示所在的 entity->pads[index] 中的數組下標. pad 有三種標志 sink 接收端口、source 發送端口 和 must connect 必須連接.
#define MEDIA_PAD_FL_SINK (1 << 0) // sink 接收端口
#define MEDIA_PAD_FL_SOURCE (1 << 1) // source 發送端口
#define MEDIA_PAD_FL_MUST_CONNECT (1 << 2) // connect 端口必須是連接狀態
????通過 media_entity_pads_init 函數將 pads 添加到所屬的 entity. 下面偽代碼展示了添加過程.
static struct v4l2_subdev sensorA_sd;
// sensorA 只有 1 個 pad, 并且為發送端口.
static struct media_pad sensorA_pads[1] = {{.flags = MEDIA_PAD_FL_SOURCE,},
};int xxx_init(void)
{// ......ret = media_entity_pads_init(&sensorA_sd.entity, sizeof(sensorA_pads), sensorA_pads);// ......
}
4) media_link 組件
????media_link 用于連接 pad 和 pad. 如下圖所示, link 有兩個一個 link 一個 linkback, 設計兩個 link 是為了方便鏈表的遍歷.
????link 也是驅動提前注冊的, 有哪些可以 link 在一起, 驅動需要提前規劃好并且使用 media_create_pad_link 接口創建好這些 link. 用戶空間則對這些 link 進行連接還是斷開的控制.有了 link 之后就可以通過 pad 返回對面的設備. 下面代碼展示了獲取流程.
struct v4l2_subdev *get_remote_sensor(struct media_pad *local)
{struct media_pad *remote;remote = media_entity_remote_pad(local);return media_entity_to_v4l2_subdev(remote->entity);
}
EXPORT_SYMBOL_GPL(get_remote_sensor);
????有了這個技巧, 我們就能在當前設備的接口里面通過 v4l2_subdev_call 調用遠端設備的接口, 從而實現動態調用的功能.
static int isp_v4l2_streamon(struct file *file, void *fh, enum v4l2_buf_type type)
{struct video_device *vdev = video_devdata(file);struct v4l2_subdev * remote_sub;remote_sub = get_remote_sensor(&vdev->entity.pads[0]);v4l2_subdev_call(remote_sub, video, s_stream, 1);return 0;
}
????這樣我們只需要在應用切換 link 就能實現動態切換了.
2. 添加 media controller
????有了這些知識, 給我們的 sensor_A 、sensorB、csi 控制器以及 isp vido 模塊 添加 media controller 吧. 這里的修改也是基于前面的 subdev 驅動修改的, 這里也只給出 patch.
1) 給 isp 添加 media entity
????給我們的 /dev/video9 描述的 isp 添加 media entity, 按照前面的關系圖, 我們需要添加一個 pad(sink) 用于接收 csi 的數據.
Index: kernel/drivers/media/my_camera.c
===================================================================
--- kernel.orig/drivers/media/my_camera.c
+++ kernel/drivers/media/my_camera.c
@@ -16,9 +16,21 @@struct v4l2_device my_v4l2_dev;EXPORT_SYMBOL_GPL(my_v4l2_dev);+static struct media_device media_dev;
+struct video_device isp_vdev;EXPORT_SYMBOL_GPL(isp_vdev);+struct v4l2_subdev *get_remote_sensor(struct media_pad *local)
+{
+ struct media_pad *remote;
+
+ remote = media_entity_remote_pad(local);
+
+ return media_entity_to_v4l2_subdev(remote->entity);
+}
+EXPORT_SYMBOL_GPL(get_remote_sensor);
+static int isp_open(struct file *file){printk("simple_isp: device opened\n");
@@ -33,8 +45,15 @@ static int isp_release(struct file *filestatic int isp_v4l2_streamon(struct file *file, void *fh, enum v4l2_buf_type type){
+ struct video_device *vdev = video_devdata(file);
+ struct v4l2_subdev * remote_sub;
+printk("%s\n", __func__);+ remote_sub = get_remote_sensor(&vdev->entity.pads[0]);
+
+ v4l2_subdev_call(remote_sub, video, s_stream, 1);
+return 0;}@@ -52,6 +71,12 @@ static const struct v4l2_file_operations.release = isp_release,};+static struct media_pad isp_pads[1] = {
+ {
+ .flags = MEDIA_PAD_FL_SINK,
+ },
+};
+static int __init isp_init(void) {int ret;@@ -74,6 +99,22 @@ static int __init isp_init(void) {isp_vdev.vfl_dir = VFL_DIR_RX;isp_vdev.device_caps = V4L2_CAP_VIDEO_CAPTURE | V4L2_CAP_READWRITE;+ isp_vdev.entity.function = MEDIA_ENT_F_CAM_SENSOR;
+ ret = media_entity_pads_init(&isp_vdev.entity, 1, isp_pads);
+
+ my_v4l2_dev.mdev = &media_dev;// 這個要在 video_register_device 前面
+ snprintf(media_dev.model, sizeof(media_dev.model), "My Virtual Media Device");
+ snprintf(media_dev.driver_name, sizeof(media_dev.driver_name), "My Virtual driver");
+ snprintf(media_dev.serial, sizeof(media_dev.serial), "My Virtual serial");
+ snprintf(media_dev.bus_info, sizeof(media_dev.bus_info), "My Virtual bus_info");
+ media_device_init(&media_dev);
+
+ ret = media_device_register(&media_dev);
+ if (ret) {
+ pr_err("media_device_register failed\n");
+ return ret;
+ }
+// 注冊 video device.ret = video_register_device(&isp_vdev, VFL_TYPE_GRABBER, -1);if (ret) {
2) 給 subdev 添加 media entity
????給我們的 sensor_A 和 sensorB 分別添加一個 pad(source) 用于傳送數據到 csi. 給 csi 控制器 添加兩個 pad(source/link) 分別用于接收 sensor 的數據和發送數據給 isp. 最后給他們添加 link.
ndex: kernel/drivers/media/my_sensorB.c
===================================================================
--- kernel.orig/drivers/media/my_sensorB.c
+++ kernel/drivers/media/my_sensorB.c
@@ -15,11 +15,21 @@extern struct v4l2_device my_v4l2_dev;+extern struct v4l2_subdev *get_remote_sensor(struct media_pad *local);
+static int sensor_s_stream(struct v4l2_subdev *sd, int on){
+
+ struct v4l2_subdev * remote_sub;
+printk("%s: %s stream %s\n", __func__, sd->name, on ? "on" : "off");
-
- return 0;
+
+ if(strcmp(sd->name, "csi_control") == 0){
+ remote_sub = get_remote_sensor(&sd->entity.pads[0]);
+ v4l2_subdev_call(remote_sub, video, s_stream, 1);
+ }
+
+ return 0;}static const struct v4l2_subdev_video_ops sensor_video_ops = {
@@ -30,7 +40,28 @@ static struct v4l2_subdev_ops sensor_ops.video = &sensor_video_ops,};-struct v4l2_subdev* my_sensor_register(const char *name)
+static struct media_pad sensorA_pads[1] = {
+ {
+ .flags = MEDIA_PAD_FL_SOURCE,
+ },
+};
+
+static struct media_pad sensorB_pads[1] = {
+ {
+ .flags = MEDIA_PAD_FL_SOURCE,
+ },
+};
+
+static struct media_pad sensor_csi_pads[2] = {
+ {
+ .flags = MEDIA_PAD_FL_SINK,
+ },
+ {
+ .flags = MEDIA_PAD_FL_SOURCE,
+ },
+};
+
+struct v4l2_subdev* my_sensor_register(const char *name, unsigned int pad_num, struct media_pad *pads){struct v4l2_subdev *sd;int ret;
@@ -42,6 +73,9 @@ struct v4l2_subdev* my_sensor_register(csd->flags = V4L2_SUBDEV_FL_HAS_DEVNODE;strscpy(sd->name, name, sizeof(sd->name));+ sd->entity.function = MEDIA_ENT_F_CAM_SENSOR;
+ ret = media_entity_pads_init(&sd->entity, pad_num, pads);
+ret = v4l2_device_register_subdev(&my_v4l2_dev, sd);ret = v4l2_device_register_subdev_nodes(&my_v4l2_dev);
@@ -49,15 +83,22 @@ struct v4l2_subdev* my_sensor_register(creturn sd;}+extern struct video_device isp_vdev;
+static int __init sensor_module_init(void){
+ int ret;struct v4l2_subdev *sensor_A;struct v4l2_subdev *sensor_B;struct v4l2_subdev *csi_control;- sensor_A = my_sensor_register("sensor_A");
- sensor_B = my_sensor_register("sensor_B");
- csi_control = my_sensor_register("csi_control");
+ sensor_A = my_sensor_register("sensor_A", 1, sensorA_pads);
+ sensor_B = my_sensor_register("sensor_B", 1, sensorB_pads);
+ csi_control = my_sensor_register("csi_control", 2, sensor_csi_pads);
+
+ ret = media_create_pad_link(&sensor_A->entity, 0, &csi_control->entity, 0, MEDIA_LNK_FL_ENABLED);
+ ret = media_create_pad_link(&sensor_B->entity, 0, &csi_control->entity, 0, 0);
+ ret = media_create_pad_link(&csi_control->entity, 1, &isp_vdev.entity, 0, MEDIA_LNK_FL_ENABLED);return 0;}
3) 應用程序
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <linux/videodev2.h>
#include <errno.h>
#include <sys/mman.h>
#include <string.h>int main() {int fd;// 打開設備 /dev/video9fd = open("/dev/video9", O_RDWR);if (fd == -1) {perror("打開設備失敗");return -1;}printf("camera open\n");struct v4l2_buffer buf;buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;buf.memory = V4L2_MEMORY_MMAP;buf.index = 0;// 6. 啟動視頻流if (ioctl(fd, VIDIOC_STREAMON, &buf.type) == -1) {perror("啟動視頻流失敗");close(fd);return 1;}printf("vcam stream on\n");// 關閉設備close(fd);printf("camera close\n");return 0;
}
4) 驗證結果
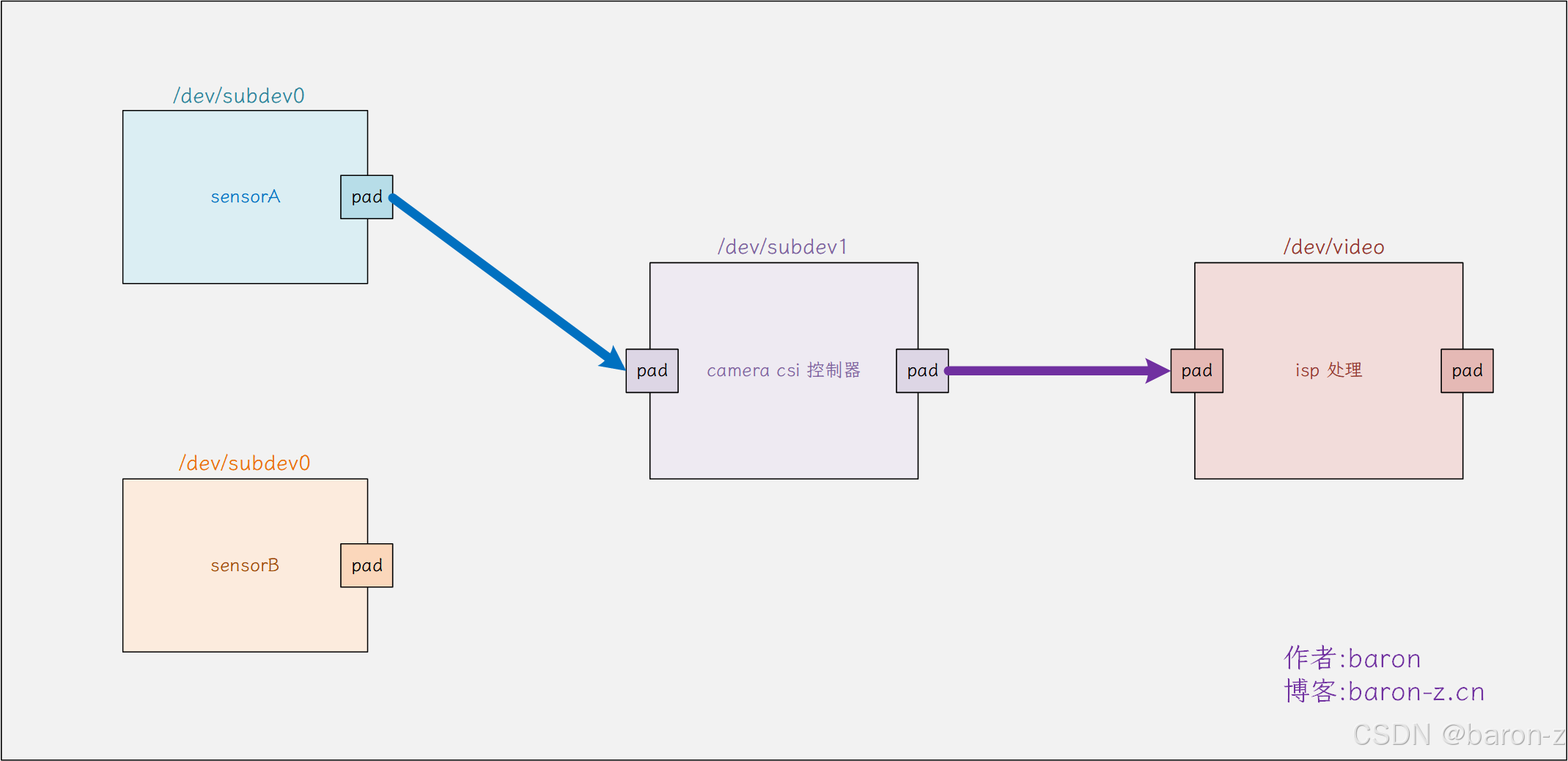
????驗證需要用 media-ctl 工具, 命令 media-ctl -d /dev/media1 -p 用于打印基本信息. 如圖所示默認
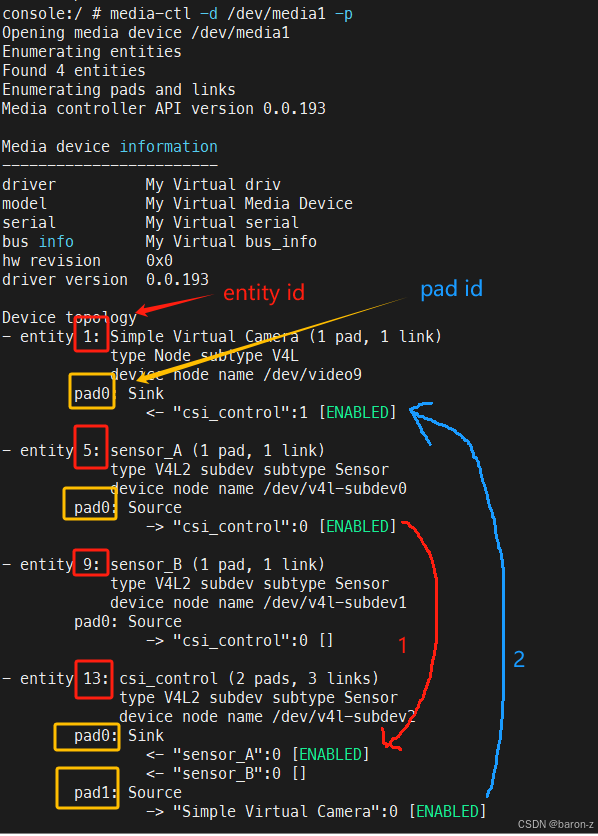
????有兩個關鍵的信息 entity id 和 pad id , 創建鏈接需要用到這兩個 id. 驅動在注冊的時候創建了一個默認的連接圖中也可以看出來 sensor_A -> csi 控制器 -> isp vido 模塊. 我們來驗證一下這個鏈接.
console:/cache # ./mytest
[ 1224.326341] simple_isp: device opened
camera open
vcam stream on
camera close
console:/cache # [ 1224.326580] isp_v4l2_streamon
[ 1224.326607] sensor_s_stream: csi_control stream on
[ 1224.326626] sensor_s_stream: sensor_A stream on // 通過 isp 的 open 調用到 sensor_A
[ 1224.327022] simple_isp: device closed????接下來我們用 media-ctl 修改連接為 sensorB -> csi 控制器 -> isp vido 模塊.
130|console:/cache # media-ctl -d /dev/media1 --reset // 先清除原來的鏈接
// 前面的 9:0 就是 sensorB 的 entity id 和 pad id
130|console:/cache # media-ctl -d /dev/media1 -l "9:0 -> 13:0 [1]" // 創建 sensorB --> csi 控制器的連接
130|console:/cache # media-ctl -d /dev/media1 -l "13:1 -> 1:0 [1]" // 創建 csi 控制器 --> isp vido 模塊的連接
????修改之后如圖
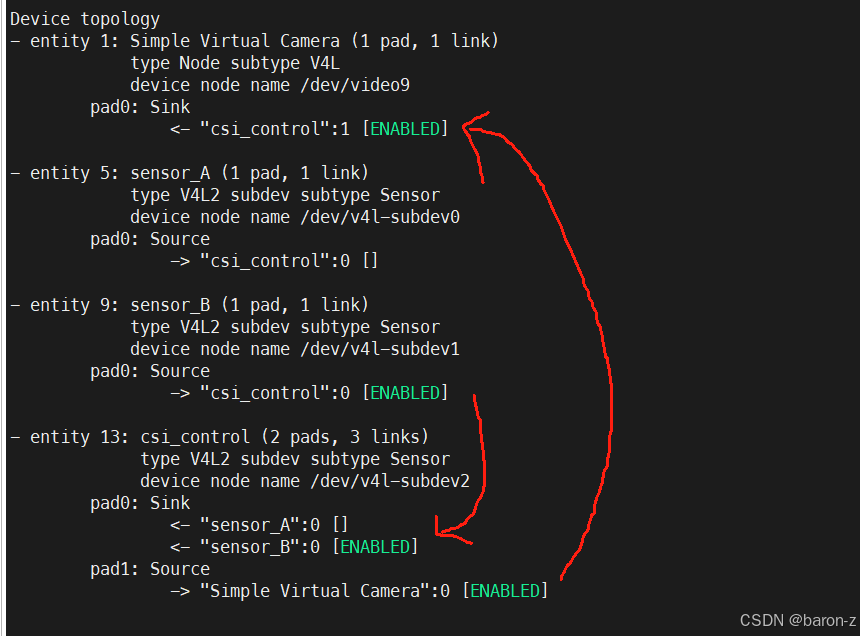
????再來編程驗證, 發現 sensor 已經動態切換成 sensor_B 了
console:/cache # ./mytest
[ 1728.598123] simple_isp: device opened
camera open
vcam stream on
camera close
console:/cache # [ 1728.598343] isp_v4l2_streamon
[ 1728.598368] sensor_s_stream: csi_control stream on
[ 1728.598387] sensor_s_stream: sensor_B stream on // 通過 isp 的 open 調用到 sensor_B
[ 1728.598794] simple_isp: device closed
五、設備樹 ports 方法
????linux 設備樹中使用 port(端口) 和 endpoint(端點) 用來描述設備之間的連接關系. 這種連接關系主要用于多媒體, 音頻, 視頻等場景. 其實就是通過 port 和 endpoint 來找到 dts 描述的對方設備.
????為了兼容 acpi linux 又整了一套 fwnode 接口封裝了設備樹相關的操作接口, 有兩個關鍵的數據結構 fwnode_handle 和 fwnode_endpoint, 前者用于描述設備節點, 后者則用于記錄端點信息.
struct fwnode_endpoint {unsigned int port; // 端口號 idunsigned int id; // 端點 id, 用于區分同一端口下的多個端點const struct fwnode_handle *local_fwnode;
};
????他們的接口實現在 drivers/base/property.c 和 drivers/of/property.c 中, 下面給出常見接口.
1. 常見接口
1) fwnode_graph_get_port_parent
????獲取設備節點寫的 fwnode 的 prev 指向的端點的下一個端點, 如果 prev 為空則表示找第一個端點.
- 注意這里的 fwnode 必現為設備節點 device_node
- 當 prev 為 NULL 時 device_node --> ports --> port --> endpiont
- 當 prev 不為空時 prev --> parent_node --> endpoint
struct fwnode_handle *fwnode_graph_get_next_endpoint(const struct fwnode_handle *fwnode, struct fwnode_handle *prev);
2) fwnode_graph_get_remote_endpoint
????獲取 fwnode 描述的端點的遠端端點, endpoint --> remote_endpoint --> endpoint.
struct fwnode_handle *fwnode_graph_get_remote_endpoint(const struct fwnode_handle *fwnode);
3) fwnode_graph_parse_endpoint
????讀取 fwnode 描述的 endpoint 的端點信息和端點信息.
endpoint->port設備樹 port 的 reg 屬性endpoint->id設備樹中的 endpoint 的 reg 屬性
int fwnode_graph_parse_endpoint(const struct fwnode_handle *fwnode, struct fwnode_endpoint *endpoint);
4) fwnode_graph_get_remote_port
????獲取 fwnode 描述的 endpoint 的遠程 endpoint 端點的 port 節點.
struct fwnode_handle *fwnode_graph_get_remote_port_parent(const struct fwnode_handle *fwnode);
5) fwnode_graph_get_port_parent
????獲取 fwnode 描述的 endpoint 的遠程 endpoint 端點的 device 設備節點.
struct fwnode_handle *fwnode_graph_get_endpoint_by_id(const struct fwnode_handle *fwnode, u32 port, u32 endpoint, unsigned long flags);
2. 編程驗證
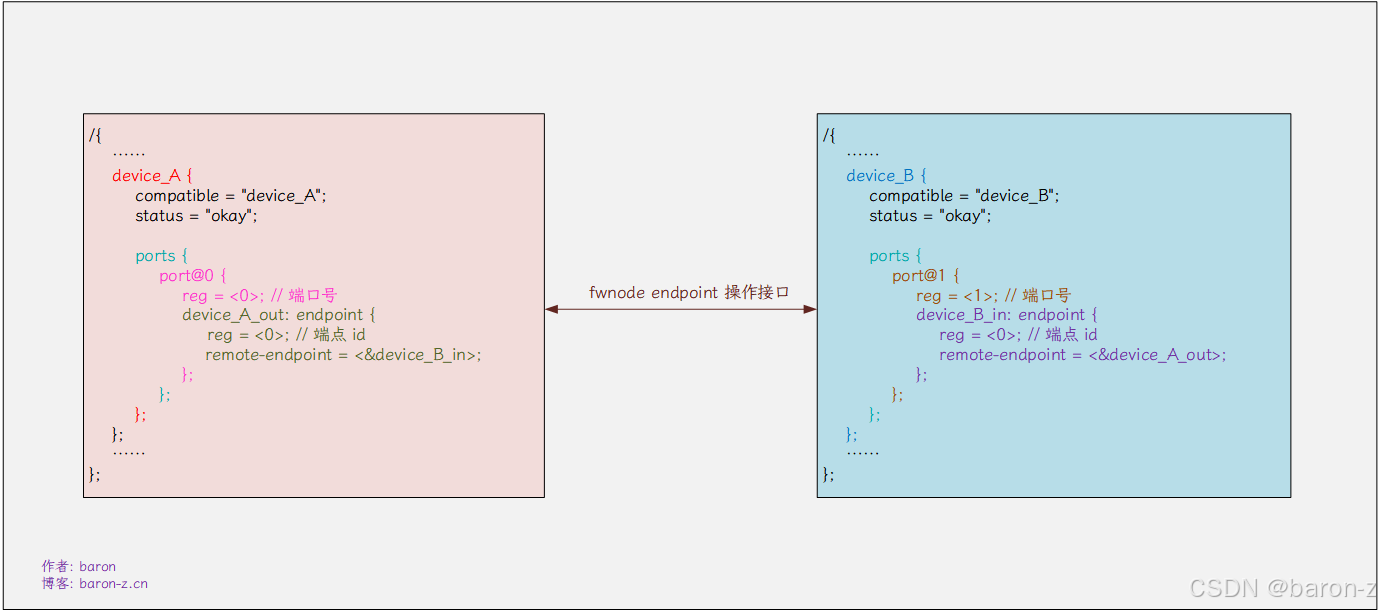
????設備樹的編寫如下, 設計了兩個設備, 然后通過上面的接口, 獲取對方設備的信息.
/{......device_A { // 設備 Acompatible = "device_A";status = "okay";ports {#address-cells = <1>;#size-cells = <0>;port@11 {#address-cells = <1>;#size-cells = <0>;reg = <11>; // 設備 A 的端口號device_A_out: endpoint@0 {reg = <0>; // 設備 A 的端點號remote-endpoint = <&device_B_in>;};};};};device_B { // 設備 Bcompatible = "device_B";status = "okay";ports {#address-cells = <1>;#size-cells = <0>;port@12 {#address-cells = <1>; #size-cells = <0>;reg = <12>; // 設備 B 的端口號device_B_in: endpoint@1 {reg = <1>; // 設備 B 的端點號remote-endpoint = <&device_A_out>;};};};};......
};
1) 設備 A 的驗證程序
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/device.h>
#include <linux/platform_device.h>
#include <linux/firmware.h>
#include <linux/fwnode.h>
#include <linux/property.h>
#include <linux/mod_devicetable.h>
#include <linux/of.h>static int device_A_probe(struct platform_device *pdev)
{struct fwnode_handle *fwnode = of_fwnode_handle(pdev->dev.of_node);struct fwnode_handle *endpoint;struct fwnode_handle *remote_endpoint;struct fwnode_endpoint ep;struct fwnode_handle *remote_port;struct fwnode_handle *remote_device;int ret;printk("Device A: probe begin\n");// 獲取當前設備的端點endpoint = fwnode_graph_get_next_endpoint(fwnode, NULL);if (endpoint){printk("endpiont name:%s\n", ((to_of_node(endpoint))->full_name));}// 解析端點信息ret = fwnode_graph_parse_endpoint(endpoint, &ep);if (!ret){// 打印端口號和端點 IDprintk("device A Port ID: %u\n", ep.port);printk("device A Endpoint ID: %u\n", ep.id);}// 獲取當前端點的遠程端點remote_endpoint = fwnode_graph_get_remote_endpoint(endpoint);if (remote_endpoint) {printk("remote_endpiont name:%s\n", ((to_of_node(remote_endpoint))->full_name));}// 解析端點信息ret = fwnode_graph_parse_endpoint(remote_endpoint, &ep);if (!ret){// 打印遠端端口和端點 IDprintk("device B Port ID: %u\n", ep.port);printk("device B Endpoint ID: %u\n", ep.id);}// 獲取遠端 device b 的 port 節點remote_port = fwnode_graph_get_remote_port(endpoint);if (remote_port) {printk("remote port name:%s\n", ((to_of_node(remote_port))->full_name));}// 獲取遠端 device b 的設備節點remote_device = fwnode_graph_get_port_parent(endpoint);if (remote_device){printk("remote device name:%s\n", ((to_of_node(remote_device))->full_name));}printk("Device A: probe end\n");return 0;
}static const struct of_device_id device_A_of_match[] = {{ .compatible = "device_A"},{},
};struct platform_driver device_A_driver = {.probe = device_A_probe,.driver = {.name = "device_A_driver",.of_match_table = device_A_of_match,},
};static int __init device_A_init(void)
{return platform_driver_register(&device_A_driver);
}static void __exit device_A_exit(void)
{platform_driver_unregister(&device_A_driver);
}module_init(device_A_init);
module_exit(device_A_exit);MODULE_LICENSE("GPL");
MODULE_AUTHOR("baron");
MODULE_DESCRIPTION("Device A Driver");
驗證結果:
[ 1.206735] Device A: probe begin
[ 1.206754] endpiont name:endpoint@0 // 打印設備 A 的端點名
[ 1.206767] device A Port ID: 11 // 打印設備 A 的端口號
[ 1.206777] device A Endpoint ID: 0 // 打印設備 A 的端點號
[ 1.206791] remote_endpiont name:endpoint@1 // 打印遠程設備 B 的端點名
[ 1.206804] device B Port ID: 12 // 打印遠程設備 B 的端口號
[ 1.206813] device B Endpoint ID: 1 // 打印遠程設備 B 的端點號
[ 1.206820] remote port name:port@12 // 打印遠程設備 B 的端口名
[ 1.206830] remote device name:device_A // 打印遠程設備名
[ 1.206840] Device A: probe end
2) 設備 B 的驗證程序
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/device.h>
#include <linux/platform_device.h>
#include <linux/firmware.h>
#include <linux/fwnode.h>
#include <linux/property.h>
#include <linux/mod_devicetable.h>
#include <linux/of.h>static int device_B_probe(struct platform_device *pdev)
{struct fwnode_handle *fwnode = of_fwnode_handle(pdev->dev.of_node);struct fwnode_handle *endpoint;struct fwnode_handle *remote_endpoint;struct fwnode_endpoint ep;struct fwnode_handle *remote_port;struct fwnode_handle *remote_device;int ret;printk("Device B: probe begin\n");// 獲取當前設備的端點endpoint = fwnode_graph_get_next_endpoint(fwnode, NULL);if (endpoint){printk("endpiont name:%s\n", ((to_of_node(endpoint))->full_name));}// 解析端點信息ret = fwnode_graph_parse_endpoint(endpoint, &ep);if (!ret){// 打印端口號和端點 IDprintk("device B Port ID: %u\n", ep.port);printk("device B Endpoint ID: %u\n", ep.id);}// 獲取當前端點的遠程端點remote_endpoint = fwnode_graph_get_remote_endpoint(endpoint);if (remote_endpoint) {printk("remote_endpiont name:%s\n", ((to_of_node(remote_endpoint))->full_name));}// 解析端點信息ret = fwnode_graph_parse_endpoint(remote_endpoint, &ep);if (!ret){// 打印遠端端口和端點 IDprintk("device A Port ID: %u\n", ep.port);printk("device A Endpoint ID: %u\n", ep.id);}// 獲取遠端 device a 的 port 節點remote_port = fwnode_graph_get_remote_port(endpoint);if (remote_port) {printk("remote port name:%s\n", ((to_of_node(remote_port))->full_name));}// 獲取遠端 device a 的設備節點remote_device = fwnode_graph_get_port_parent(endpoint);if (remote_device){printk("remote device name:%s\n", ((to_of_node(remote_device))->full_name));}printk("Device B: probe end\n");return 0;
}static const struct of_device_id device_B_of_match[] = {{ .compatible = "device_B"},{},
};static struct platform_driver device_B_driver = {.probe = device_B_probe,.driver = {.name = "device_B_driver",.of_match_table = device_B_of_match,},
};static int __init device_B_init(void)
{return platform_driver_register(&device_B_driver);
}static void __exit device_B_exit(void)
{platform_driver_unregister(&device_B_driver);
}module_init(device_B_init);
module_exit(device_B_exit);MODULE_LICENSE("GPL");
MODULE_AUTHOR("baron");
MODULE_DESCRIPTION("Device B Driver");
驗證結果:
[ 1.207246] Device B: probe begin
[ 1.207263] endpiont name:endpoint@1 // 打印設備 B 的端點名
[ 1.207278] device B Port ID: 12 // 打印設備 B 的端口號
[ 1.207287] device B Endpoint ID: 1 // 打印設備 B 的端點號
[ 1.207303] remote_endpiont name:endpoint@0 // 打印遠程設備 A 的端點名
[ 1.207314] device A Port ID: 11 // 打印遠程設備 A 的端號
[ 1.207323] device A Endpoint ID: 0 // 打印遠程設備 A 的端點號
[ 1.207336] remote port name:port@11 // 打印遠程設備 A 的端口名
[ 1.207346] remote device name:device_B // 打印遠程設備名
[ 1.207356] Device B: probe end
3. 總結
????通過這樣的方式, 我們就能夠通過設備樹找到對方設備, 從而形成數據流, 因此也約定俗成數據要發給誰對應的 remote-endpoint 就設置為 xxx_in. 例如有兩個攝像頭 camera0 和 camera1, 兩個攝像頭都接到了 csi2_dphy 這個攝像頭控制器, 然后通過 csi2_dphy 輸出到 isp 處理. 就可以通過 dts 來實現設備的級聯.
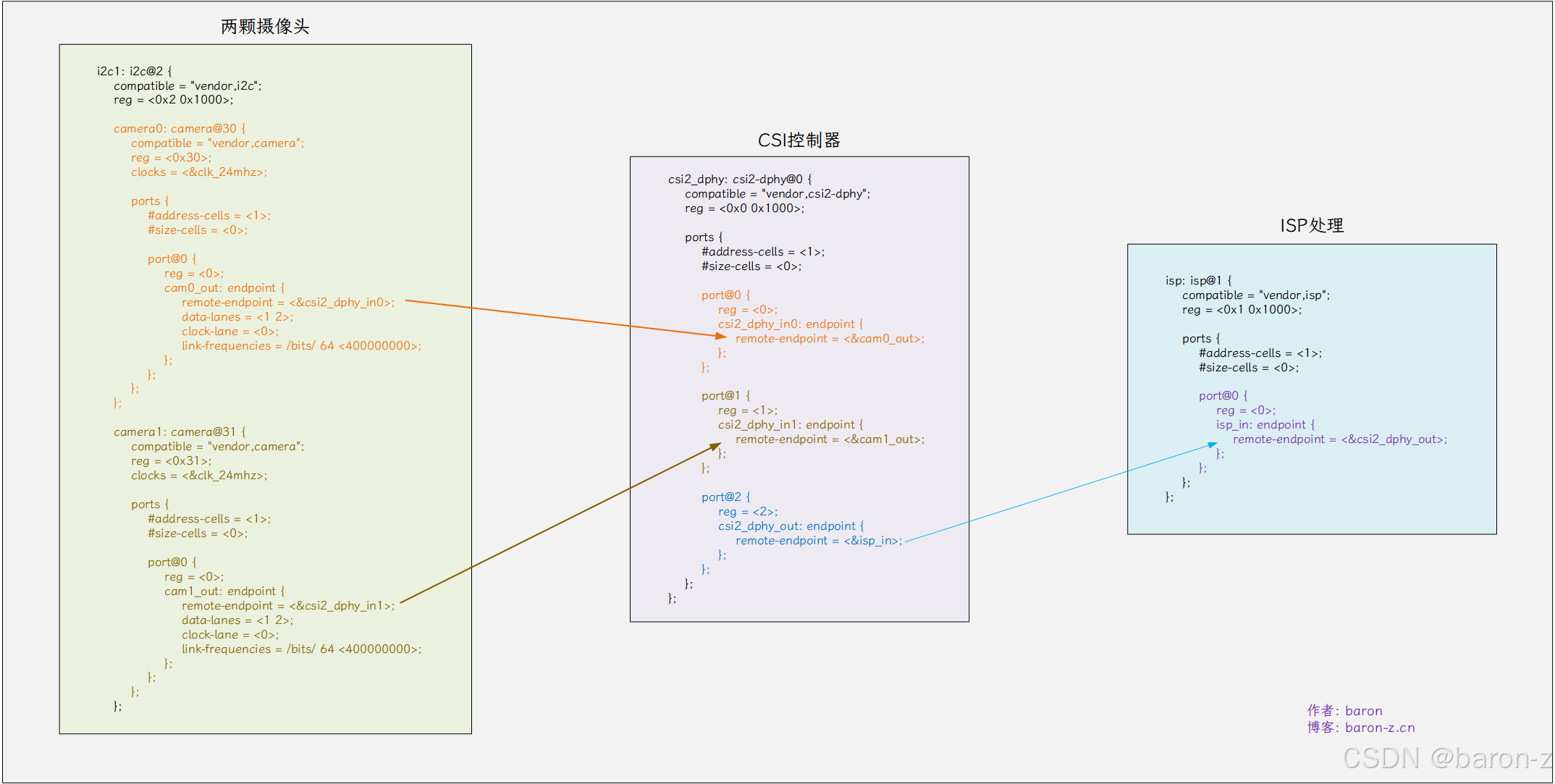
????這樣對于攝像頭驅動來說, 只需要在 dts 節點里面創建一個 ports 然后把 remote-endpoint 指向我們需要輸入的攝像頭控制器節點的 endpoint 就可以完成模塊的對接, 因為在攝像頭控制器加載的時候, 會遍歷設備樹中 ports 節點上的攝像頭設備, 這樣就知道了接的是哪個攝像頭了. 不需要的時候設置為 disable 或者直接注釋掉就行了. 十分方便.
)
入門指南)




)



)








