- 操作系統:ubuntu22.04
- OpenCV版本:OpenCV4.9
- IDE:Visual Studio Code
- 編程語言:C++11
算法描述
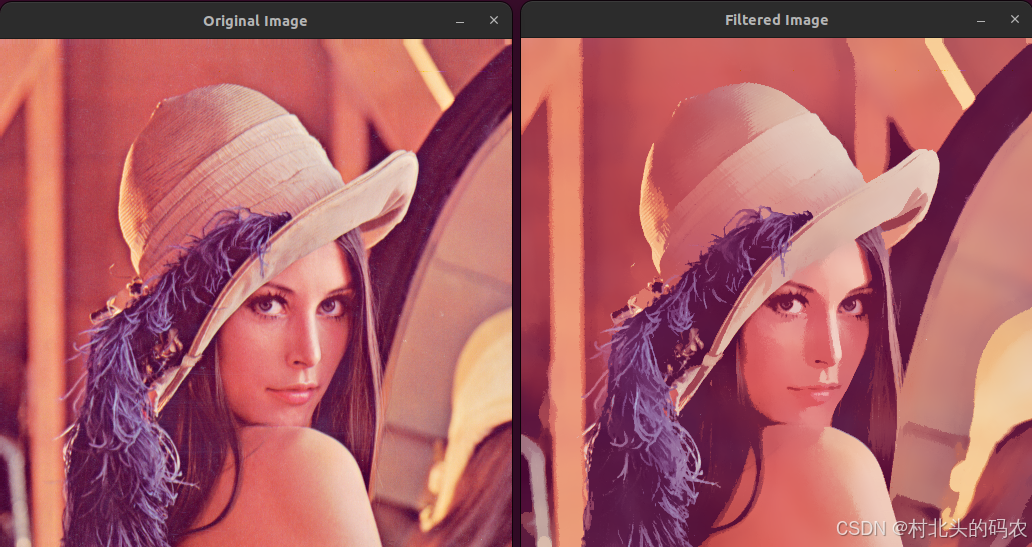
在 GPU 上對圖像執行 均值漂移濾波(Mean Shift Filtering),用于圖像分割或平滑處理。
該函數將輸入圖像中的每個像素用其鄰域內顏色分布的“模式”代替,從而實現:
- 顏色平滑(去除噪聲)
- 邊界保持
- 圖像分割的預處理
函數原型
void cv::cuda::meanShiftFiltering
(InputArray src,OutputArray dst,int sp,int sr,TermCriteria criteria = TermCriteria(TermCriteria::MAX_ITER+TermCriteria::EPS, 5, 1),Stream & stream = Stream::Null()
)
參數
- src 源圖像。目前僅支持 CV_8UC4 類型的圖像(即:8位無符號整型、4通道圖像)。
- dst 目標圖像,包含映射后的點的顏色。它與源圖像具有相同的尺寸和類型。
- sp 空間窗口半徑(以像素為單位)。
- sr 顏色窗口半徑(以顏色差異為單位)。
- criteria 終止條件。參見 TermCriteria 結構體,用于控制算法迭代的最大次數或收斂精度。
- stream 用于異步執行的 CUDA 流(Stream)。
代碼示例
#include <opencv2/cudaimgproc.hpp>
#include <opencv2/opencv.hpp>int main()
{// Step 1: 讀取圖像cv::Mat h_src = cv::imread( "/media/dingxin/data/study/OpenCV/sources/images/Lenna.png" );if ( h_src.empty() ){std::cerr << "Failed to load image!" << std::endl;return -1;}// Step 2: 轉換為 4 通道圖像(BGRA)cv::cuda::GpuMat d_src, d_src_rgba;d_src.upload( h_src );cv::cuda::cvtColor( d_src, d_src_rgba, cv::COLOR_BGR2BGRA ); // 轉為 CV_8UC4// Step 3: 創建輸出圖像cv::cuda::GpuMat d_dst;// Step 4: 設置參數并執行均值漂移濾波int sp = 10; // 空間窗口大小int sr = 30; // 顏色窗口大小cv::cuda::meanShiftFiltering( d_src_rgba, d_dst, sp, sr );// Step 5: 下載結果并顯示cv::Mat h_dst;d_dst.download( h_dst );// Step 6: 如果需要恢復為 3 通道圖像cv::cuda::GpuMat d_dst_bgr;cv::cuda::cvtColor( d_dst, d_dst_bgr, cv::COLOR_BGRA2BGR );cv::Mat h_final;d_dst_bgr.download( h_final );cv::imshow( "Original Image", h_src );cv::imshow( "Filtered Image", h_final );cv::waitKey( 0 );return 0;
}
運行結果
)







)
)


)





)