旋量理論為描述剛體在三維空間中的運動提供了強大而優雅的數學框架。與傳統的歐拉角或方向余弦矩陣相比,旋量理論通過螺旋運動的概念統一了旋轉和平移,在機器人學、計算機圖形學和多體動力學領域具有顯著優勢。這種描述不僅幾何直觀,而且計算高效,特別適合現代機器人運動規劃和控制的需求。
旋量理論基礎與數學描述
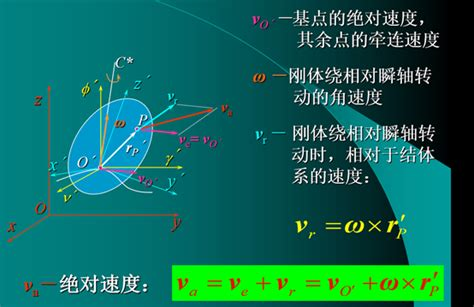
剛體在三維空間中的運動本質上是旋轉和平移的組合。旋量理論的核心思想是將這種運動描述為沿空間某軸的螺旋運動。運動旋量 ξ = [ v , ω ] T \xi = [v, \omega]^T ξ=[v,ω]T 作為基本數學工具,其中 ω \omega ω 表示角速度矢量, v v v 表示線速度矢量。當 ω ≠ 0 \omega \neq 0 ω=0 時, v v v 可分解為旋轉軸上某點的線速度和平移分量,滿足關系式 v = ? ω × q + h ω v = -\omega \times q + h\omega v=?ω×q+hω,這里 q q q 是旋轉軸上的任意點, h h h 是表征螺旋運動特性的節距。
齊次變換矩陣 T T T 提供了一種描述剛體位置和姿態的完整表示:
T = [ R p 0 1 ] T = \begin{bmatrix} R & p \\ 0 & 1 \end{bmatrix} T=[R0?p1?]
其中 R R R 是3×3旋轉矩陣, p p p 是位置矢量。這種矩陣屬于特殊歐幾里得群 S E ( 3 ) SE(3) SE(3),其關鍵優勢在于可通過指數映射 e ξ ^ θ e^{\hat{\xi}\theta} eξ^?θ 生成,其中 ξ ^ \hat{\xi} ξ^? 是運動旋量的4×4矩陣表示:
ξ ^ = [ ω ^ v 0 0 ] \hat{\xi} = \begin{bmatrix} \hat{\omega} & v \\ 0 & 0 \end{bmatrix} ξ^?=[ω^0?v0?]
旋轉矩陣 R R R 本身可通過指數映射表示為 R ( ω , θ ) = e ω ^ θ R(\omega, \theta) = e^{\hat{\omega}\theta} R(ω,θ)=eω^θ。這里 ω ^ \hat{\omega} ω^ 是角速度矢量 ω = [ ω x , ω y , ω z ] T \omega = [\omega_x, \omega_y, \omega_z]^T ω=[ωx?,ωy?,ωz?]T 的反對稱矩陣:
ω ^ = [ 0 ? ω z ω y ω z 0 ? ω x ? ω y ω x 0 ] \hat{\omega} = \begin{bmatrix} 0 & -\omega_z & \omega_y \\ \omega_z & 0 & -\omega_x \\ -\omega_y & \omega_x & 0 \end{bmatrix} ω^= ?0ωz??ωy???ωz?0ωx??ωy??ωx?0? ?
反對稱矩陣具有重要性質: ω ^ 2 = ω ω T ? ∥ ω ∥ 2 I \hat{\omega}^2 = \omega\omega^T - \|\omega\|^2I ω^2=ωωT?∥ω∥2I 和 ω ^ 3 = ? ∥ ω ∥ 2 ω ^ \hat{\omega}^3 = -\|\omega\|^2\hat{\omega} ω^3=?∥ω∥2ω^。這些性質使得旋轉矩陣的指數展開簡化為Rodrigues公式:
e ω ^ θ = I + ω ^ sin ? θ + ω ^ 2 ( 1 ? cos ? θ ) e^{\hat{\omega}\theta} = I + \hat{\omega}\sin\theta + \hat{\omega}^2(1 - \cos\theta) eω^θ=I+ω^sinθ+ω^2(1?cosθ)
運動旋量的分類與指數映射
根據運動特性,運動旋量可分為兩類基本形式:
-
轉動軸:描述純旋轉或螺旋運動
ξ = [ ? ω × q ω ] \xi = \begin{bmatrix} -\omega \times q \\ \omega \end{bmatrix} ξ=[?ω×qω?]
其指數映射為:
e ξ ^ θ = [ e ω ^ θ ( I ? e ω ^ θ ) q 0 1 ] e^{\hat{\xi}\theta} = \begin{bmatrix} e^{\hat{\omega}\theta} & (I - e^{\hat{\omega}\theta})q \\ 0 & 1 \end{bmatrix} eξ^?θ=[eω^θ0?(I?eω^θ)q1?] -
移動軸:描述純平移運動
ξ = [ v 0 ] \xi = \begin{bmatrix} v \\ 0 \end{bmatrix} ξ=[v0?]
其指數映射簡化為:
e ξ ^ θ = [ I v θ 0 1 ] e^{\hat{\xi}\theta} = \begin{bmatrix} I & v\theta \\ 0 & 1 \end{bmatrix} eξ^?θ=[I0?vθ1?]
對于一般旋量運動,齊次變換矩陣的指數形式具有統一表達式:
T = e ξ ^ θ = [ e ω ^ θ ( I ? e ω ^ θ ) ( ω × v ) + ω ω T v θ 0 1 ] T = e^{\hat{\xi}\theta} = \begin{bmatrix} e^{\hat{\omega}\theta} & (I - e^{\hat{\omega}\theta})(\omega \times v) + \omega\omega^T v\theta \\ 0 & 1 \end{bmatrix} T=eξ^?θ=[eω^θ0?(I?eω^θ)(ω×v)+ωωTvθ1?]
式中 ω ω T v θ \omega\omega^T v\theta ωωTvθ 項對應螺旋運動的平移分量,其系數 h = ω T v ∥ ω ∥ 2 h = \frac{\omega^T v}{\|\omega\|^2} h=∥ω∥2ωTv? 稱為節距,量化了平移與旋轉的比例關系。當 h = 0 h=0 h=0 時為純旋轉, h = ∞ h=\infty h=∞ ( ω = 0 \omega=0 ω=0) 時為純平移, h ≠ 0 h \neq 0 h=0 則為螺旋運動。
旋量理論在機器人學中的應用
旋量理論的核心優勢在于其統一性和幾何直觀性。通過李群 S E ( 3 ) SE(3) SE(3) 與李代數 s e ( 3 ) \mathfrak{se}(3) se(3) 的對應關系 T = e ξ ^ θ T = e^{\hat{\xi}\theta} T=eξ^?θ,我們可以建立剛體運動的完整數學描述。
在機器人運動學建模中,旋量理論提供了比傳統DH參數更優越的指數積公式:
T ( θ ) = e ξ ^ 1 θ 1 e ξ ^ 2 θ 2 ? e ξ ^ n θ n T ( 0 ) T(\theta) = e^{\hat{\xi}_1\theta_1} e^{\hat{\xi}_2\theta_2} \cdots e^{\hat{\xi}_n\theta_n} T(0) T(θ)=eξ^?1?θ1?eξ^?2?θ2??eξ^?n?θn?T(0)
這種方法不依賴特定坐標系選擇,幾何意義清晰,且具有更好的數值穩定性。
剛體速度計算同樣受益于旋量表示。本體坐標系中的運動旋量可直接由 ξ ^ = T ? 1 T ˙ \hat{\xi} = T^{-1}\dot{T} ξ^?=T?1T˙ 計算得到,這為動力學分析和控制律設計提供了便利。
Python實現示例
以下Python代碼實現了旋量理論的核心計算,包括反對稱矩陣生成、旋轉矩陣指數映射和齊次變換矩陣生成:
import numpy as np
from scipy.linalg import expm, normdef skew_symmetric(v):"""生成反對稱矩陣"""return np.array([[0, -v[2], v[1]],[v[2], 0, -v[0]],[-v[1], v[0], 0]])def exp_rot(omega, theta):"""旋轉矩陣的指數映射 (Rodrigues公式)"""if norm(omega) < 1e-10:return np.eye(3)omega = omega / norm(omega) # 單位化omega_hat = skew_symmetric(omega)return np.eye(3) + omega_hat * np.sin(theta) + omega_hat @ omega_hat * (1 - np.cos(theta))def exp_screw(xi, theta):"""齊次變換矩陣的指數映射"""v = np.array(xi[0:3])w = np.array(xi[3:6])if norm(w) < 1e-10: # 純平移return np.block([[np.eye(3), v.reshape(3,1)*theta],[np.zeros((1,3)), 1]])# 螺旋運動w_hat = skew_symmetric(w)R = exp_rot(w, theta)# 計算平移分量w_norm = norm(w)w_unit = w / w_normpitch = np.dot(w_unit, v) / w_normq = np.cross(w, v) / (w_norm**2)# 使用閉式表達式計算平移p = (np.eye(3) - R) @ q + pitch * theta * w_unitreturn np.block([[R, p.reshape(3,1)],[np.zeros((1,3)), 1]])def log_screw(T):"""從變換矩陣提取旋量參數"""R = T[0:3, 0:3]p = T[0:3, 3]# 提取旋轉軸和角度cos_theta = (np.trace(R) - 1) / 2cos_theta = np.clip(cos_theta, -1, 1)theta = np.arccos(cos_theta)if abs(theta) < 1e-10: # 純平移return np.array([*p, 0, 0, 0]), theta# 提取旋轉軸w_hat = (R - R.T) / (2 * np.sin(theta))w = np.array([w_hat[2,1], w_hat[0,2], w_hat[1,0]])# 計算線速度部分G_inv = (1/theta)*np.eye(3) - 0.5*w_hat + (1/theta - 0.5/np.tan(theta/2))*w_hat@w_hatv = G_inv @ preturn np.array([*v, *w]), theta# 示例:繞z軸旋轉90度
omega = np.array([0, 0, 1])
theta = np.pi/2
xi = np.array([0, 0, 0, *omega]) # 純旋轉旋量T = exp_screw(xi, theta)
print("繞z軸旋轉90度的變換矩陣:")
print(np.round(T, 3))# 示例:沿x軸平移2單位
xi_trans = np.array([1, 0, 0, 0, 0, 0])
T_trans = exp_screw(xi_trans, 2)
print("\n沿x軸平移2單位的變換矩陣:")
print(T_trans)# 示例:螺旋運動(繞z軸旋轉+沿z軸平移)
xi_helical = np.array([0, 0, 0.5, 0, 0, 1])
T_helical = exp_screw(xi_helical, np.pi/2)
print("\n螺旋運動(旋轉90度+平移0.785):")
print(np.round(T_helical, 3))# 驗證反解
xi_recovered, theta_recovered = log_screw(T_helical)
print("\n從變換矩陣恢復旋量參數:")
print(f"旋量: {np.round(xi_recovered, 3)}, 角度: {np.round(theta_recovered, 3)}")
旋量理論的優勢與展望
旋量理論通過幾何直觀的螺旋運動概念,統一了剛體的旋轉和平移運動。相比傳統方法,它具有三大顯著優勢:
- 坐標系無關性:旋量描述不依賴特定坐標系選擇,簡化了多坐標系變換
- 計算高效性:指數映射的閉式解避免了數值積分和迭代計算
- 幾何直觀性:螺旋軸概念使運動規劃更符合工程直覺
在現代機器人學中,旋量理論已成為高級運動規劃算法的基礎。特別是對于并聯機構、連續體機器人和柔性機器人等復雜系統,旋量描述提供了比傳統方法更簡潔的建模框架。隨著幾何控制理論和李群優化方法的發展,旋量理論在實時軌跡優化、柔順控制和多機器人協作等領域展現出廣闊前景。
旋量理論不僅是一種數學工具,更是一種理解空間運動的思維方式。它揭示了剛體運動的深層幾何結構,為我們設計、控制和優化機器人系統提供了本質洞察。隨著機器人應用場景的日益復雜,這種基于幾何的建模方法將發揮越來越重要的作用。


)















