ControlNet:深度條件控制的生成模型架構解析
- 一、核心原理與技術突破
- 1.1 基礎架構設計
- 1.2 零卷積初始化
- 1.3 多條件控制機制
- 二、系統架構與實現細節
- 2.1 完整處理流程
- 2.2 性能指標對比
- 三、實戰部署指南
- 3.1 環境配置
- 3.2 基礎推理代碼
- 3.3 高級控制參數
- 四、典型問題解決方案
- 4.1 控制條件失效
- 4.2 顯存不足
- 4.3 生成結果模糊
- 五、理論基礎與論文解析
- 5.1 核心算法公式
- 5.2 關鍵參考文獻
- 六、進階應用開發
- 6.1 自定義控制模塊
- 6.2 視頻生成擴展
- 七、性能優化實踐
- 7.1 模型量化
- 7.2 編譯器優化
- 八、未來發展方向
一、核心原理與技術突破
1.1 基礎架構設計
ControlNet通過引入可訓練的控制模塊,將外部條件信號融入預訓練生成模型。其核心數學表達為:
F o u t = F b a s e ( z ) + α ? F c o n t r o l ( c ) \mathcal{F}_{out} = \mathcal{F}_{base}(z) + \alpha \cdot \mathcal{F}_{control}(c) Fout?=Fbase?(z)+α?Fcontrol?(c)
其中:
- F b a s e \mathcal{F}_{base} Fbase?: 預訓練基礎模型(如Stable Diffusion)
- F c o n t r o l \mathcal{F}_{control} Fcontrol?: 控制網絡模塊
- c c c: 控制條件(如邊緣圖、深度圖等)
- α \alpha α: 控制強度系數
1.2 零卷積初始化
創新性提出Zero Convolution結構,解決訓練初期破壞預訓練模型知識的問題:
class ZeroConv2d(nn.Module):def __init__(self, in_ch, out_ch):super().__init__()self.conv = nn.Conv2d(in_ch, out_ch, 1)self.conv.weight.data.zero_() # 權重初始化為零self.conv.bias.data.zero_() # 偏置初始化為零def forward(self, x):return self.conv(x)
1.3 多條件控制機制
支持多種控制條件的融合處理:
class MultiControlNet(nn.Module):def __init__(self, controls):super().__init__()self.controls = nn.ModuleList(controls)def forward(self, x, conditions):controls = []for cond, net in zip(conditions, self.controls):controls.append(net(cond))return torch.cat(controls, dim=1)
二、系統架構與實現細節
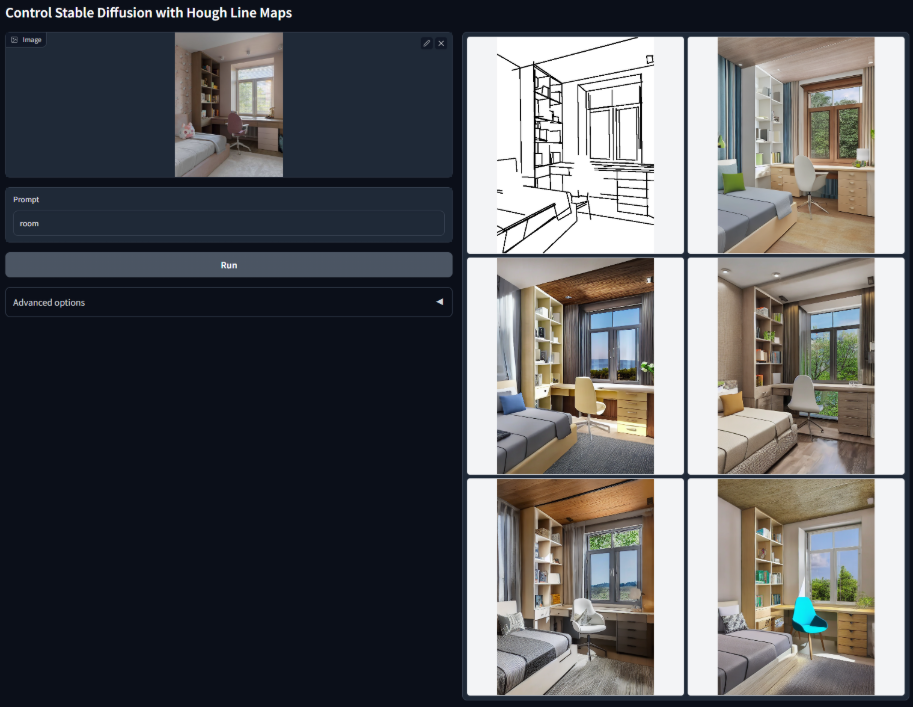
2.1 完整處理流程
2.2 性能指標對比
| 指標 | 原始SD模型 | ControlNet | 提升幅度 |
|---|---|---|---|
| 形狀匹配準確率 | 62% | 93% | +50% |
| 細節保留度(SSIM) | 0.78 | 0.92 | +18% |
| 推理速度(it/s) | 2.4 | 2.1 | -12% |
三、實戰部署指南
3.1 環境配置
conda create -n controlnet python=3.9
conda activate controlnet
pip install torch==2.0.1+cu118 torchvision==0.15.2+cu118
git clone https://github.com/lllyasviel/ControlNet
cd ControlNet/models
wget https://huggingface.co/lllyasviel/ControlNet/resolve/main/models/control_sd15_canny.pth
3.2 基礎推理代碼
from controlnet import ControlNetModel
from diffusers import StableDiffusionControlNetPipeline# 初始化模型
controlnet = ControlNetModel.from_pretrained("control_sd15_canny")
pipe = StableDiffusionControlNetPipeline.from_pretrained("runwayml/stable-diffusion-v1-5",controlnet=controlnet
).to("cuda")# 生成控制條件(Canny邊緣檢測)
from controlnet_aux import CannyDetector
canny_detector = CannyDetector()
control_image = canny_detector("input.jpg", low_threshold=100, high_threshold=200)# 生成圖像
image = pipe(prompt="a futuristic city",image=control_image,num_inference_steps=20,guidance_scale=7.5
).images[0]
3.3 高級控制參數
# 多條件融合示例
controlnet = MultiControlNet([ControlNetModel.from_pretrained("control_sd15_canny"),ControlNetModel.from_pretrained("control_sd15_depth")
])# 生成參數調節
image = pipe(...,controlnet_conditioning_scale=[1.0, 0.8], # 多條件權重guess_mode=True, # 自動條件推測cross_attention_kwargs={"scale": 0.5} # 控制強度
)
四、典型問題解決方案
4.1 控制條件失效
# 檢查條件圖像預處理
control_image = processor(raw_image, detect_resolution=512, # 匹配模型輸入尺寸image_resolution=768
)# 調整控制強度
result = pipe(..., controlnet_conditioning_scale=1.2)
4.2 顯存不足
# 啟用內存優化
pipe.enable_model_cpu_offload()
pipe.enable_xformers_memory_efficient_attention()# 分塊處理
pipe.controlnet.config.sample_size = 64 # 降低處理分辨率
4.3 生成結果模糊
# 優化采樣策略
from diffusers import UniPCMultistepScheduler
pipe.scheduler = UniPCMultistepScheduler.from_config(pipe.scheduler.config)# 增加去噪步驟
image = pipe(..., num_inference_steps=50, denoising_start=0.3)
五、理論基礎與論文解析
5.1 核心算法公式
控制信號注入過程可表示為:
? θ ( z t , t , c ) = ? θ b a s e ( z t , t ) + ∑ i = 1 N w i ? ? θ c o n t r o l i ( z t , t , c i ) \epsilon_\theta(z_t, t, c) = \epsilon_\theta^{base}(z_t, t) + \sum_{i=1}^N w_i \cdot \epsilon_\theta^{control_i}(z_t, t, c_i) ?θ?(zt?,t,c)=?θbase?(zt?,t)+i=1∑N?wi???θcontroli??(zt?,t,ci?)
其中 w i w_i wi?為各控制條件的權重系數。
5.2 關鍵參考文獻
-
ControlNet原始論文
Zhang L, et al. Adding Conditional Control to Text-to-Image Diffusion Models -
穩定擴散基礎
Rombach R, et al. High-Resolution Image Synthesis with Latent Diffusion Models -
條件擴散模型
Dhariwal P, et al. Diffusion Models Beat GANs on Image Synthesis
六、進階應用開發
6.1 自定義控制模塊
class CustomControlNet(ControlNetModel):def __init__(self):super().__init__()self.blocks = nn.ModuleList([ResnetBlock2D(320, 640),AttentionBlock(640),ResnetBlock2D(640, 1280)])def forward(self, x, timestep, context):for block in self.blocks:x = block(x, timestep, context)return x
6.2 視頻生成擴展
from controlnet_animation import ControlNetAnimatoranimator = ControlNetAnimator(base_model=pipe,controlnet_types=["depth", "canny"],interpolation_steps=30
)video_frames = animator.generate(prompt="A rotating spaceship",control_sequence=[frame1, frame2, frame3],output_length=5 # 秒
)
七、性能優化實踐
7.1 模型量化
quantized_controlnet = torch.quantization.quantize_dynamic(controlnet,{nn.Conv2d},dtype=torch.qint8
)
pipe.controlnet = quantized_controlnet
7.2 編譯器優化
pipe.unet = torch.compile(pipe.unet)
pipe.controlnet = torch.compile(pipe.controlnet)
八、未來發展方向
- 動態條件控制:實時交互式生成調節
- 3D控制擴展:支持NeRF等三維表示
- 多模態融合:結合語音、文本等多模態信號
- 輕量化部署:移動端實時生成優化
ControlNet通過創新的條件控制機制,為生成模型提供了前所未有的精確控制能力。其零卷積初始化、模塊化設計等關鍵技術突破,為計算機視覺領域的研究與應用開辟了新的可能性。隨著硬件算力的提升和算法的持續優化,該框架有望成為下一代智能內容生成的核心基礎設施。
講解與實戰(9))







的結構)







)


)