網上教程真少!奮發圖強自力更生!2025.5.1
目前有用的鏈接:
unity如何添加自定義HID設備,自己開發的手柄如何支持unity。 - 嗶哩嗶哩
HID Support | Input System | 1.0.2?官方教程
https://zhuanlan.zhihu.com/p/503209742
分步詳解:鳳凰6000模擬器接入Unity Input System?
前提條件:
-
安裝 Unity Input System:?確保你的 Unity 項目已經通過 Package Manager 安裝了?Input System?包。如果沒有,請前往?Window -> Package Manager,選擇?Unity Registry,搜索?Input System?并安裝。
-
啟用 Input System:?在?Edit -> Project Settings -> Player -> Other Settings?中,找到?Active Input Handling?選項,將其設置為?Input System Package (New)?或者?Both。Unity 會提示重啟編輯器。
步驟一:找到鳳凰SM600手柄的 VID 和 PID
這是識別你設備的“身份證號”。
-
連接手柄:?將鳳凰SM600手柄通過 USB 連接到你的 Windows 電腦。
-
打開設備管理器:
-
在 Windows 搜索欄搜索“設備管理器”并打開。
-
或者右鍵點擊“此電腦” -> “管理” -> “設備管理器”。
-
-
找到你的手柄:?在設備列表中查找,它可能在“人體學輸入設備 (HID)”、"通用串行總線控制器" 下,或者顯示為設備名稱(如 "Phoenix SM600" 或類似名稱)。仔細查找,可能顯示為 "USB 輸入設備" 或 "HID-compliant game controller"。
-
提示:?如果不確定是哪個設備,可以嘗試拔掉手柄再插上,觀察設備列表的變化。
-
-
查看屬性:?找到設備后,右鍵點擊它,選擇“屬性”。
-
查找 VID 和 PID:
-
切換到“詳細信息”選項卡。
-
在“屬性”下拉菜單中,選擇“硬件 ID”。
-
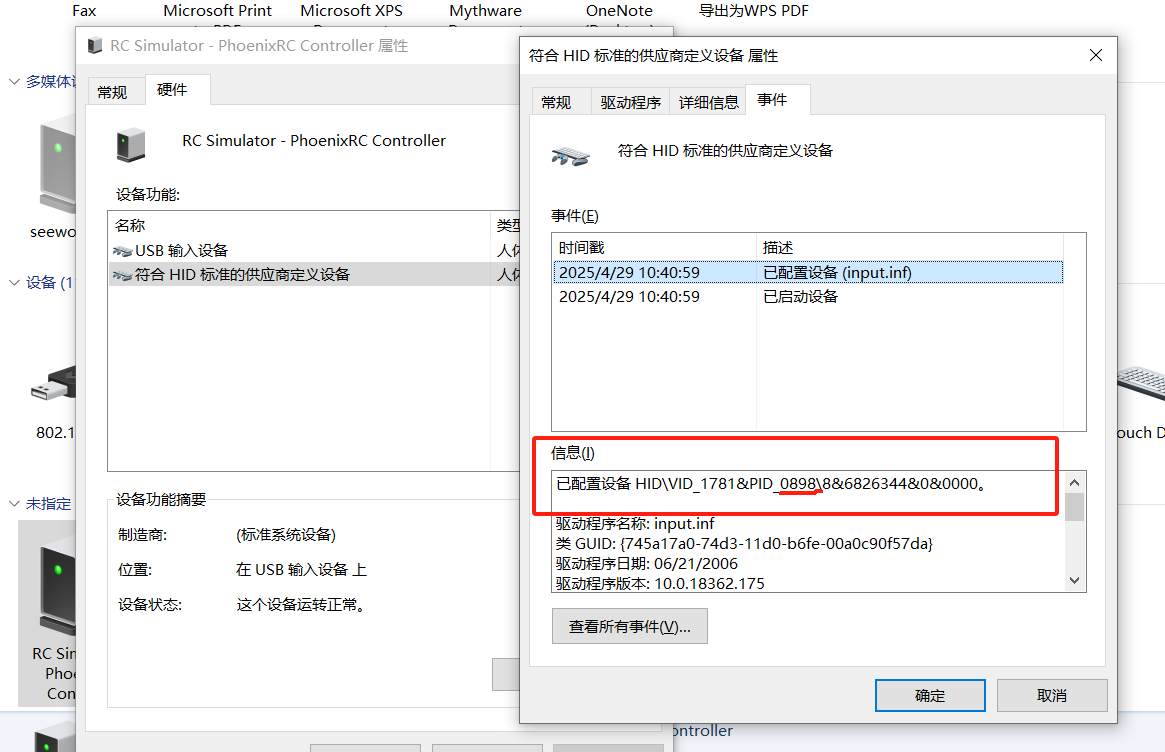
你會看到類似?HID\VID_xxxx&PID_xxxx?或?USB\VID_xxxx&PID_xxxx?的值。這里的?xxxx?就是你需要記下的?Vendor ID (VID)?和?Product ID (PID)。它們通常是 4 位的十六進制數(例如?054C?或?09CC)。?請記下你找到的實際 VID 和 PID 值。
-
?步驟1:獲取設備VID/PID.
 ?
?
?操作流程?
- 連接鳳凰6000模擬器到電腦
- 打開
設備管理器?→ 右鍵設備 → ?屬性 → 詳細信息 → 硬件ID? - 記錄
VID_XXXX和PID_XXXX(例如:VID_1234&PID_5678)
步驟2:?撰寫腳本讓Unity支持設備哦
下面的腳本是自己創建一個Unity 可識別的搖桿!實現檢測硬件,并且被Unity的新輸入系統支持!
using UnityEngine; // 使用Unity引擎的基本功能(比如畫圖、控制游戲)
using UnityEngine.InputSystem; // 使用Unity的輸入系統(控制鍵盤、鼠標、手柄)
using UnityEngine.InputSystem.Layouts; // 定義輸入設備的布局(比如手柄的按鈕和搖桿位置)
using UnityEngine.InputSystem.HID; // 處理USB設備(如飛行器遙控器)
using UnityEngine.InputSystem.Utilities; // 工具類幫助處理輸入
using UnityEngine.InputSystem.LowLevel; // 低級輸入處理(直接讀取設備數據)
using System.Runtime.InteropServices; // 處理不同系統的兼容性(比如Windows和Mac)
using System.Diagnostics; // 調試工具(查看程序運行信息)
#if UNITY_EDITOR // 如果在Unity編輯器中運行
using UnityEditor; // Unity編輯器的工具(如創建菜單)
#endif// 1. 定義設備布局結構體 (簡化版,只映射原始字節)
[StructLayout(LayoutKind.Explicit, Size = 9)] // 報告大小為 9 字節
public struct PhoenixSM600HIDInputReport : IInputStateTypeInfo
{// Report ID (偏移 0)[FieldOffset(0)] public byte reportId;// 將所有 8 個數據字節映射為原始 Byte 控件// 這樣可以在 Input Debugger 中看到每個字節的原始值[InputControl(name = "byte1Raw", layout = "Byte", offset = 1, displayName = "數據字節 1 (右搖桿左右?)")][FieldOffset(1)] public byte byte1_raw;[InputControl(name = "byte2Raw", layout = "Byte", offset = 2, displayName = "數據字節 2 (未知?)")][FieldOffset(2)] public byte byte2_raw;[InputControl(name = "byte3Raw", layout = "Byte", offset = 3, displayName = "數據字節 3 (右搖桿上下?)")][FieldOffset(3)] public byte byte3_raw;[InputControl(name = "byte4Raw", layout = "Byte", offset = 4, displayName = "數據字節 4 (左搖桿上下?)")][FieldOffset(4)] public byte byte4_raw;[InputControl(name = "byte5Raw", layout = "Byte", offset = 5, displayName = "數據字節 5 (左搖桿左右?)")][FieldOffset(5)] public byte byte5_raw;[InputControl(name = "byte6Raw", layout = "Byte", offset = 6, displayName = "數據字節 6 (右上角開關?)")][FieldOffset(6)] public byte byte6_raw;[InputControl(name = "byte7Raw", layout = "Byte", offset = 7, displayName = "數據字節 7 (左上角旋鈕?)")][FieldOffset(7)] public byte byte7_raw;[InputControl(name = "byte8Raw", layout = "Byte", offset = 8, displayName = "數據字節 8 (按鈕?)")][FieldOffset(8)] public byte byte8_raw;// 實現 IInputStateTypeInfo 接口public FourCC format => new FourCC('H', 'I', 'D');
}// 2. 注冊設備布局 (保持不變,確保 VID/PID 正確)
#if UNITY_EDITOR
[InitializeOnLoad]
#endif
// 注意這里可以繼續繼承 Gamepad,即使當前沒有映射所有 Gamepad 控件
[InputControlLayout(stateType = typeof(PhoenixSM600HIDInputReport), displayName = "Phoenix SM600 Drone Controller (Raw)")] // 修改顯示名稱以便區分
public class PhoenixSM600ControllerSupport : Gamepad
{static PhoenixSM600ControllerSupport(){// 使用 VID 和 PID 注冊設備// 確保這里的 VID/PID (0x1781, 0x0898) 是正確的InputSystem.RegisterLayout<PhoenixSM600ControllerSupport>(matches: new InputDeviceMatcher().WithInterface("HID").WithCapability("vendorId", 0x1781).WithCapability("productId", 0x0898));Debug.Log("Phoenix SM600 Controller (Raw) layout registered.");}[RuntimeInitializeOnLoadMethod(RuntimeInitializeLoadType.BeforeSceneLoad)]static void InitializeInPlayer(){// Triggers the static constructor}// 不需要在這里定義屬性或 FinishSetup(),因為只映射了原始字節
}這個腳本就像一個設備驅動程序!不需要掛載游戲物體上被運行!
這個腳本的作用:?想象一下,你買了一個新的、很特別的玩具遙控器(Phoenix SM600),但你的電腦(Unity)還不認識它。這個腳本就像是給電腦安裝一個“驅動程序”或者“說明書”。它告訴 Unity:“嘿,如果你看到一個 USB 設備,它的身份證號(VID)是?0x1781,型號(PID)是?0x0898,那它就是這個鳳凰遙控器,它發過來的信號(數據)是這樣排列的(就是我們定義的那個?struct?結構)。”
它是如何工作的:
代碼里的?[InitializeOnLoad]?(編輯器里用) 和?[RuntimeInitializeOnLoadMethod]?(游戲運行時用) 這兩個“魔法標記”,會確保 Unity 在啟動時或者游戲開始運行時,自動去執行這個腳本里的注冊代碼(InputSystem.RegisterLayout?那部分)。
這個注冊過程是全局性的,它直接修改了 Unity 輸入系統本身對設備的認知,而不是只針對某一個游戲物體。
它不是什么:?這個腳本不是用來?讀取?遙控器輸入的(比如檢查哪個按鈕被按下了)。它只是負責?讓 Unity 能夠理解?這個遙控器。
誰來讀取輸入:?你需要另外寫一個腳本(或者使用 Unity 的 Input Action Assets),那個腳本才需要掛載到游戲物體上。那個腳本會去問 Unity 的輸入系統:“嘿,鳳凰遙控器的左搖桿現在在哪里?”或者“按鈕 A 按下了嗎?” 因為有了我們這個“說明書”腳本的注冊,輸入系統才能正確地回答那個掛載在物體上的腳本的問題。
總結:
這個腳本是定義和注冊設備布局的,它在后臺自動工作,讓 Unity 認識新設備。
它不需要掛載到游戲物體上。你需要另外的腳本(掛載到物體上)來實際使用這個遙控器的輸入。
所以,你只需要把這個 C# 文件放到你的 Unity 項目的?Assets?文件夾(或者任何子文件夾)下,確保沒有編譯錯誤,它就會自動生效了。
不用擔心,沒有被掛載到場景就不被打包出去生效的問題!它不需要掛載也會在打包后生效:
?
這個腳本是用來“教”Unity認識你的手柄的,而不是直接讀取輸入的,所以它不需要掛載。
現在,關于打包成 APK 安裝到 VR 眼鏡(如 Meta Quest、Pico 等獨立 VR 設備)后,如何確保手柄能工作,你的思路是正確的,關鍵在于確保那個“教學”過程在 VR 眼鏡上也能順利進行。
以下是確保它工作的關鍵點和步驟:
-
[RuntimeInitializeOnLoadMethod]?是關鍵:
-
你的代碼里使用了?[RuntimeInitializeOnLoadMethod(RuntimeInitializeLoadType.BeforeSceneLoad)]?這個標記。這非常重要!
-
它的作用就是告訴 Unity:“當這個游戲(打包后的 APK)在任何設備上啟動時,在加載第一個場景之前,請自動運行?InitializeInPlayer()?這個函數。”
-
而?InitializeInPlayer()?函數雖然是空的,但它的存在會觸發?PhoenixSM600ControllerSupport?類的靜態構造函數(static PhoenixSM600ControllerSupport())運行。
-
靜態構造函數里的?InputSystem.RegisterLayout(...)?就是注冊手柄布局的核心代碼。
-
結論:?只要你的腳本包含在最終的 APK 包里,并且有?[RuntimeInitializeOnLoadMethod],那么每次游戲在 VR 眼鏡上啟動時,注冊過程理論上會自動執行。
-
-
VR 眼鏡的操作系統 (Android) 需要識別手柄:
-
大多數現代獨立 VR 眼鏡(如 Quest 2/3, Pico 4)運行的是定制版的 Android 系統。
-
它們通常支持?USB OTG (On-The-Go),這意味著它們的 USB-C 接口可以作為“主機”來識別和使用外部 USB 設備,比如鍵盤、鼠標、還有游戲手柄。
-
當你的 USB 手柄通過合適的轉接頭(如果需要的話,比如 USB-A 轉 USB-C)插入 VR 眼鏡的 USB 口時,VR 眼鏡的 Android 系統首先需要能夠識別它是一個標準的?HID (Human Interface Device)?游戲手柄。
-
對于絕大多數標準 USB 游戲手柄,這是自動的,Android 系統有內置的驅動來處理它們。你的 Phoenix SM600 很可能也屬于這一類。
-
-
Unity 輸入系統在 Android 上的工作:
-
Unity 的 Input System 包在 Android 平臺上會與 Android 底層的輸入管理系統交互。
-
當 Android 系統識別出你的手柄后,它會把這個設備信息告訴正在運行的 Unity 應用。
-
此時,因為你的腳本已經在游戲啟動時通過?RegisterLayout?注冊了你的手柄的特定 VID (Vendor ID - 廠家 ID) 和 PID (Product ID - 產品 ID),Unity 的 Input System 就會檢查新連接的設備列表。
-
如果它發現一個 HID 設備的 VID 和 PID?完全匹配你在代碼中設置的?0x1781?和?0x0898,它就會應用你定義的?PhoenixSM600ControllerSupport?布局來處理這個手柄的輸入信號。
-
-
需要檢查和確認的事項:
-
VR 眼鏡的 USB OTG 支持:?確認你的目標 VR 眼鏡型號確實支持通過 USB 連接外部游戲手柄。對于主流設備(Quest, Pico)通常是支持的,但最好查一下官方文檔或社區確認。
-
正確的 VID/PID:?再次確認你在代碼中使用的?0x1781?和?0x0898?絕對準確。差一個數字或字母,匹配就會失敗。你可以在 PC 的設備管理器里查找手柄的硬件 ID 來確認。
-
Input System 包已安裝:?確保你的 Unity 項目中,Input System 包已經通過 Package Manager 正確安裝,并且包含在最終的 Build 設置里。
-
腳本包含在 Build 中:?確保你的?PhoenixSM600ControllerSupport.cs?文件位于?Assets?文件夾下,并且沒有被設置排除在 Build 之外(通常默認是包含的)。
-
物理連接:?確保 USB 線纜和任何需要的轉接頭工作正常。
-
供電:?極少數情況下,如果手柄耗電量很大,VR 眼鏡的 USB 口可能供電不足,但這對于普通手柄不太常見。
-
-
如何測試和調試 (如果遇到問題):
-
先在 PC 上測試 Build:?打包一個 Windows/Mac 的可執行文件,確認手柄在這個獨立 Build 中能正常工作。這可以排除腳本本身邏輯或 VID/PID 錯誤的問題。
-
基礎 Android 測試:?嘗試將手柄連接到 VR 眼鏡后,看看 VR 眼鏡本身的系統菜單或者其他支持手柄的應用是否能識別到手柄(即使按鍵映射可能不對)。這能確認基礎的 OTG 和 HID 識別是否正常。
-
Android Logcat:?在 VR 眼鏡上啟用開發者模式和 USB 調試,連接到電腦,使用?adb logcat?命令。啟動你的游戲,并插拔手柄,觀察日志中是否有與 Input System、HID 或你的設備 VID/PID 相關的錯誤或信息。這是查找底層問題的強大工具。
-
Unity Profiler/Input Debugger (遠程連接):?如果可能,嘗試將 Unity 編輯器通過網絡連接到運行在 VR 眼鏡上的游戲 (Build and Run with Profiler Connection)。然后可以在編輯器中使用 Input Debugger 查看設備是否被識別,以及應用了哪個布局。
-
總結:
你的 C# 腳本設計是正確的,利用?[RuntimeInitializeOnLoadMethod]?可以在 APK 運行時自動注冊布局。只要 VR 眼鏡的 Android 系統能識別你的 USB 手柄作為標準 HID 設備,并且你的 VID/PID 完全正確,那么 Unity 的 Input System 就應該能夠匹配并使用你定義的布局,讓手柄在 VR 游戲中正常工作。關鍵在于確保硬件連接無誤、操作系統支持,以及代碼中的設備標識符準確無誤。
詳細注釋版本:
// -----------------------------------------------------------------------------
// 想象一下,我們在用積木搭一個可以和電腦溝通的玩具遙控器 (Phoenix SM600)
// 這些 'using' 語句就像是告訴電腦:“我們要用這些工具箱里的工具哦!”
// 每個工具箱里都有別人已經寫好的代碼,可以幫我們做一些事情。
// -----------------------------------------------------------------------------// 這個工具箱(UnityEngine)是 Unity 游戲引擎自帶的,有很多基礎功能。
using UnityEngine;
// 這個工具箱(UnityEngine.InputSystem)是專門用來處理玩家輸入(比如按按鈕、動搖桿)的。
using UnityEngine.InputSystem;
// 這個工具箱(UnityEngine.InputSystem.Layouts)幫助我們定義輸入設備(比如遙控器)的樣子和功能。
using UnityEngine.InputSystem.Layouts;
// 這個工具箱(UnityEngine.InputSystem.HID)是專門處理一種叫做 HID 的設備,很多鍵盤、鼠標、游戲手柄都用這種方式和電腦溝通。我們的遙控器也是。
using UnityEngine.InputSystem.HID;
// 這個工具箱(UnityEngine.InputSystem.Utilities)提供了一些方便的小工具。
using UnityEngine.InputSystem.Utilities;
// 這個工具箱(UnityEngine.InputSystem.LowLevel)處理更底層、更接近硬件的輸入信息。
using UnityEngine.InputSystem.LowLevel;
// 這個工具箱(System.Runtime.InteropServices)能幫助我們的 C# 代碼和電腦底層或者其他語言寫的代碼更好地“合作”。這里用它來精確控制數據在內存里的排列方式。
using System.Runtime.InteropServices;
// 這個工具箱(System.Diagnostics)里面有一些工具,比如可以用來在控制臺打印信息,幫助我們檢查代碼有沒有問題。
using System.Diagnostics;// -----------------------------------------------------------------------------
// 下面這幾行是特殊指令,只在 Unity 編輯器(我們制作游戲的地方)里才有用。
// 就好像說:“這段說明書只給正在搭積木的人看,玩積木的人不用看。”
// -----------------------------------------------------------------------------
#if UNITY_EDITOR // 如果我們正在使用 Unity 編輯器...
// 這個工具箱(UnityEditor)包含了很多只在 Unity 編輯器里才能使用的工具。
using UnityEditor;
#endif // ...那么就包含上面那個工具箱,否則就跳過。// -----------------------------------------------------------------------------
// 1. 定義設備布局結構體 (簡化版,只映射原始字節)
// 我們要告訴電腦,遙控器每次發過來的信息(數據包)長什么樣。
// 就像畫一張圖紙,標明這個數據包里每個位置放的是什么信息。
// 我們這里用一個叫做 "struct" 的東西來畫這張圖紙,它就像一個小盒子,專門存放遙控器發來的數據。
// -----------------------------------------------------------------------------// 這個 [StructLayout(...)] 就像是給小盒子(struct)定規矩。
// LayoutKind.Explicit 的意思是:“我們要非常明確地告訴電腦,盒子里每個東西放在哪個精確的位置(偏移量)。”
// Size = 9 的意思是:“這個小盒子總共能裝 9 個字節(byte)那么大的信息。” (一個字節就像一個小小的數字格子,可以放 0 到 255 之間的數字)
[StructLayout(LayoutKind.Explicit, Size = 9)]
// public struct PhoenixSM600HIDInputReport : IInputStateTypeInfo
// public: 表示這個圖紙(結構體)大家都可以看和用。
// struct: 告訴電腦,這是一個“結構體”,一個小數據容器的藍圖。
// PhoenixSM600HIDInputReport: 這是我們給這個小盒子圖紙起的名字,意思是“鳳凰SM600遙控器通過HID方式發送的輸入報告(數據)”。
// : IInputStateTypeInfo: 這表示我們的小盒子圖紙還遵守了一個“協議”(接口),保證它能告訴別人自己里面裝的數據是什么類型的。
public struct PhoenixSM600HIDInputReport : IInputStateTypeInfo
{// -------------------------------------------------------------------------// 在小盒子里(結構體內部)定義每個數據存放的位置和名字// -------------------------------------------------------------------------// Report ID (偏移 0)// [FieldOffset(0)] 告訴電腦:“這個數據要放在小盒子的第 0 個位置(也就是最開始的位置)。”[FieldOffset(0)]// public byte reportId; 定義了一個叫做 reportId 的小格子(byte類型),它是公開的(public)。// 這個 reportId 通常用來表示這份數據報告是關于什么的,但在這個簡單版本里我們可能不會直接用它。public byte reportId;// -------------------------------------------------------------------------// 將所有 8 個數據字節映射為原始 Byte 控件// 遙控器除了第一個字節的 reportId,后面還有 8 個字節是真正包含按鈕、搖桿信息的數據。// 我們現在先把這 8 個字節都當作“原始數字”來看,不做任何轉換。// 這樣可以在 Unity 的調試工具(Input Debugger)里直接看到遙控器發來的最原始的數字是什么。// -------------------------------------------------------------------------// [InputControl(...)] 這個標記很重要!它告訴 Unity 的輸入系統:// “嘿,這個小格子里的數據是一個‘輸入控件’!玩家可以通過它來控制游戲。”// name = "byte1Raw": 給這個控件起一個內部名字叫 "byte1Raw"。// layout = "Byte": 告訴 Unity 這個控件的數據類型就是一個原始的字節(數字 0-255)。// offset = 1: 告訴 Unity 這個數據在小盒子里的第 1 個位置(緊跟在 reportId 后面)。// displayName = "數據字節 1 (右搖桿左右?)": 這是在 Unity 調試工具里顯示給開發者看的名字,方便我們猜這個字節可能是干嘛的(比如控制右邊搖桿的左右移動?)。[InputControl(name = "byte1Raw", layout = "Byte", offset = 1, displayName = "數據字節 1 (右搖桿左右?)")]// [FieldOffset(1)] 再次確認這個數據放在小盒子的第 1 個位置。[FieldOffset(1)]// public byte byte1_raw; 定義一個公開的(public)小格子(byte類型),名字叫 byte1_raw,用來存放第 1 個數據字節的原始值。public byte byte1_raw;// 下面的定義和 byte1_raw 非常類似,只是位置(offset)和名字不一樣,對應遙控器發來的第 2 到第 8 個數據字節。// 告訴 Unity 這是第 2 個數據字節,也是一個原始字節控件。放在小盒子的第 2 個位置。[InputControl(name = "byte2Raw", layout = "Byte", offset = 2, displayName = "數據字節 2 (未知?)")]// 確認放在小盒子的第 2 個位置。[FieldOffset(2)]// 定義存放第 2 個數據字節原始值的小格子。public byte byte2_raw;// 告訴 Unity 這是第 3 個數據字節,也是一個原始字節控件。放在小盒子的第 3 個位置。(可能跟右搖桿上下有關?)[InputControl(name = "byte3Raw", layout = "Byte", offset = 3, displayName = "數據字節 3 (右搖桿上下?)")]// 確認放在小盒子的第 3 個位置。[FieldOffset(3)]// 定義存放第 3 個數據字節原始值的小格子。public byte byte3_raw;// 告訴 Unity 這是第 4 個數據字節,也是一個原始字節控件。放在小盒子的第 4 個位置。(可能跟左搖桿上下有關?)[InputControl(name = "byte4Raw", layout = "Byte", offset = 4, displayName = "數據字節 4 (左搖桿上下?)")]// 確認放在小盒子的第 4 個位置。[FieldOffset(4)]// 定義存放第 4 個數據字節原始值的小格子。public byte byte4_raw;// 告訴 Unity 這是第 5 個數據字節,也是一個原始字節控件。放在小盒子的第 5 個位置。(可能跟左搖桿左右有關?)[InputControl(name = "byte5Raw", layout = "Byte", offset = 5, displayName = "數據字節 5 (左搖桿左右?)")]// 確認放在小盒子的第 5 個位置。[FieldOffset(5)]// 定義存放第 5 個數據字節原始值的小格子。public byte byte5_raw;// 告訴 Unity 這是第 6 個數據字節,也是一個原始字節控件。放在小盒子的第 6 個位置。(可能跟右上角的某個開關有關?)[InputControl(name = "byte6Raw", layout = "Byte", offset = 6, displayName = "數據字節 6 (右上角開關?)")]// 確認放在小盒子的第 6 個位置。[FieldOffset(6)]// 定義存放第 6 個數據字節原始值的小格子。public byte byte6_raw;// 告訴 Unity 這是第 7 個數據字節,也是一個原始字節控件。放在小盒子的第 7 個位置。(可能跟左上角的某個旋鈕有關?)[InputControl(name = "byte7Raw", layout = "Byte", offset = 7, displayName = "數據字節 7 (左上角旋鈕?)")]// 確認放在小盒子的第 7 個位置。[FieldOffset(7)]// 定義存放第 7 個數據字節原始值的小格子。public byte byte7_raw;// 告訴 Unity 這是第 8 個數據字節,也是一個原始字節控件。放在小盒子的第 8 個位置。(可能跟某些按鈕有關?)[InputControl(name = "byte8Raw", layout = "Byte", offset = 8, displayName = "數據字節 8 (按鈕?)")]// 確認放在小盒子的第 8 個位置。[FieldOffset(8)]// 定義存放第 8 個數據字節原始值的小格子。public byte byte8_raw;// -------------------------------------------------------------------------// 實現 IInputStateTypeInfo 接口// 我們之前承諾了要遵守 IInputStateTypeInfo 這個協議,現在要兌現承諾。// 這個協議要求我們提供一個“格式代碼”,告訴別人我們這個小盒子里裝的是什么類型的數據。// -------------------------------------------------------------------------// public FourCC format => new FourCC('H', 'I', 'D');// public: 表示這個信息是公開的。// FourCC format: 定義了一個叫做 format 的屬性,它的類型是 FourCC(一種特殊的四個字母代碼)。// =>: 是一個簡寫方式,表示“這個屬性的值是...”// new FourCC('H', 'I', 'D'): 創建一個新的 FourCC 代碼,由字母 H, I, D 組成。這三個字母合起來就是 "HID",告訴 Unity 輸入系統:“我這個小盒子里裝的是 HID 類型的數據哦!”public FourCC format => new FourCC('H', 'I', 'D');
} // 小盒子(結構體)的定義到這里結束。// -----------------------------------------------------------------------------
// 2. 注冊設備布局 (保持不變,確保 VID/PID 正確)
// 光有數據圖紙(結構體)還不夠,我們還需要告訴 Unity:
// “當你看到一個長得像‘鳳凰SM600’遙控器的設備插到電腦上時,就用我們剛才畫的那個圖紙來理解它發來的數據。”
// 這個過程叫做“注冊布局”。
// -----------------------------------------------------------------------------#if UNITY_EDITOR // 這段代碼同樣只在 Unity 編輯器里運行
// [InitializeOnLoad] 這個標記告訴 Unity 編輯器:“當你啟動或者重新加載代碼的時候,請自動運行下面這個類(Class)里面一個特殊的靜態構造函數(后面會看到)。”
// 這樣可以確保我們的遙控器布局在編輯器一打開時就被注冊好。
[InitializeOnLoad]
#endif // 結束只在編輯器運行的部分// [InputControlLayout(...)] 這個標記是給下面定義的“類”(Class)貼標簽的。
// stateType = typeof(PhoenixSM600HIDInputReport): 告訴 Unity:“當處理這個設備時,請使用我們上面定義的 PhoenixSM600HIDInputReport 這個小盒子圖紙(結構體)來存放和理解它的狀態數據。”
// displayName = "Phoenix SM600 Drone Controller (Raw)": 這是在 Unity 編輯器的輸入設備列表里顯示的名字,方便我們找到它。(Raw 表示我們看的是原始數據)
[InputControlLayout(stateType = typeof(PhoenixSM600HIDInputReport), displayName = "Phoenix SM600 Drone Controller (Raw)")]
// public class PhoenixSM600ControllerSupport : Gamepad
// public: 表示這個“類”大家都可以用。
// class: 告訴電腦,這是一個“類”,是用來創建對象的藍圖。這個藍圖比“結構體”更復雜,可以包含數據和操作數據的方法。這里它代表了我們的遙控器在 Unity 里的“身份”。
// PhoenixSM600ControllerSupport: 我們給這個遙控器身份藍圖起的名字,意思是“對鳳凰SM600遙控器的支持”。
// : Gamepad: 這表示我們的遙控器“繼承”自 Unity 已知的 Gamepad(游戲手柄)類型。
// 意思是:“雖然我們的遙控器可能有點特殊,但你可以把它當作一種游戲手柄來對待。”
// 這樣做的好處是,即使我們現在只看了原始字節,以后想讓它表現得更像標準手柄(比如有左右搖桿、按鈕)會更容易些。
public class PhoenixSM600ControllerSupport : Gamepad
{// -------------------------------------------------------------------------// 靜態構造函數 (Static Constructor)// 這個函數很特別,它前面有 static 關鍵字,并且名字和類名完全一樣。// 它會在這個類第一次被“需要”的時候自動運行一次,而且只會運行一次。// 因為我們前面用了 [InitializeOnLoad] 標記,所以在編輯器啟動時,這個函數就會被自動運行。// 它的作用就是執行注冊布局的核心代碼。// -------------------------------------------------------------------------static PhoenixSM600ControllerSupport() // 注意這里沒有返回值,名字和類名一樣{// 使用 VID 和 PID 注冊設備// VID (Vendor ID) 就像是廠家的身份證號。// PID (Product ID) 就像是這個廠家生產的這款產品的型號。// 這兩個號碼組合起來,通常能唯一確定一個 USB 設備。// 確保這里的 VID/PID (0x1781, 0x0898) 是你的鳳凰SM600遙控器實際的號碼!如果號碼不對,Unity 就認不出你的遙控器了。// 0x 開頭表示這是一個十六進制數,是電腦喜歡用的一種數字表示方法。// InputSystem.RegisterLayout<PhoenixSM600ControllerSupport>(...)// InputSystem: 我們之前引入的輸入系統工具箱里的主要負責人。// RegisterLayout: 調用它的“注冊布局”功能。// <PhoenixSM600ControllerSupport>: 告訴它我們要注冊的是我們自己定義的這個 PhoenixSM600ControllerSupport 藍圖。InputSystem.RegisterLayout<PhoenixSM600ControllerSupport>(// matches: new InputDeviceMatcher() ...// matches: 參數告訴注冊功能:“只有滿足以下條件的設備,才使用我們這個藍圖。”// new InputDeviceMatcher(): 創建一個“設備匹配器”,用來設定匹配條件。matches: new InputDeviceMatcher()// .WithInterface("HID"): 第一個條件是,設備的接口類型必須是 "HID"。我們的遙控器是 HID 設備。.WithInterface("HID")// .WithCapability("vendorId", 0x1781): 第二個條件是,設備的“能力”(Capability)中,廠家ID(vendorId)必須是 0x1781。.WithCapability("vendorId", 0x1781)// .WithCapability("productId", 0x0898): 第三個條件是,設備的產品ID(productId)必須是 0x0898。.WithCapability("productId", 0x0898)// 只有同時滿足這三個條件的設備,才會被 Unity 識別為 PhoenixSM600ControllerSupport,并使用我們定義的布局來處理數據。); // RegisterLayout 函數調用結束// Debug.Log(...) 是向 Unity 的控制臺窗口打印一條消息。// 這就像是代碼在說:“報告!我已經成功注冊了鳳凰SM600遙控器(原始數據版)的布局!”// 這可以幫助我們確認注冊過程確實運行了。Debug.Log("Phoenix SM600 Controller (Raw) layout registered.");} // 靜態構造函數結束// -------------------------------------------------------------------------// 在游戲運行時初始化// 有時候,在編輯器里注冊好了還不夠,我們還需要確保在真正玩游戲的時候,這個注冊也能生效。// 下面這個方法就是用來做這個的。// -------------------------------------------------------------------------// [RuntimeInitializeOnLoadMethod(RuntimeInitializeLoadType.BeforeSceneLoad)]// 這個標記告訴 Unity:“當游戲開始運行后,在加載第一個游戲場景(畫面)之前,請自動運行下面這個叫做 InitializeInPlayer 的函數。”[RuntimeInitializeOnLoadMethod(RuntimeInitializeLoadType.BeforeSceneLoad)]// static void InitializeInPlayer()// static: 表示這個函數也屬于類本身,而不是某個具體的遙控器對象。// void: 表示這個函數運行完不返回任何結果。// InitializeInPlayer: 函數的名字,意思是“在玩家玩的時候進行初始化”。static void InitializeInPlayer(){// 這個函數里面是空的!但它有一個重要的作用。// // Triggers the static constructor (觸發靜態構造函數)// 僅僅是因為這個帶有 [RuntimeInitializeOnLoadMethod] 標記的函數存在,// Unity 在游戲開始運行時就會“注意到” PhoenixSM600ControllerSupport 這個類,// 如果這個時候靜態構造函數(就是上面那個注冊布局的函數)還沒運行過,// 它就會被自動觸發運行。// 這樣就保證了即使是在發布的游戲里,我們的遙控器布局也能被正確注冊。// 這是一個小技巧,確保靜態構造函數在需要時一定會被執行。}// -------------------------------------------------------------------------// 不需要在這里定義屬性或 FinishSetup(),因為只映射了原始字節// 一般來說,如果我們想讓遙控器表現得像一個標準游戲手柄,// 我們會在這里定義一些屬性,比如 leftStick (左搖桿), rightStick (右搖桿), buttonSouth (南方向按鈕,通常是 A 鍵) 等等。// 并且還會有一個叫做 FinishSetup() 的函數,在里面把從原始字節里解析出來的數據,賦值給這些標準屬性。// 但是,因為我們這個版本非常簡單,我們只關心看到原始的 8 個字節數據是什么,// 所以我們不需要定義這些額外的屬性,也不需要 FinishSetup() 函數來做轉換。// 我們在上面的結構體里用 [InputControl] 定義的 byte1Raw 到 byte8Raw 就是我們目前關心的所有輸入控件了。// -------------------------------------------------------------------------} // 遙控器身份藍圖(類)的定義到這里結束。步驟3:轉換輸入數據(從搖桿到軸數據)?
這是最關鍵也是最困難的一步,因為你需要知道手柄發送數據的確切格式。?上面代碼中的?PhoenixSM600HIDInputReport?結構體只是一個?完全假設?的例子,你必須用實際的數據結構替換它!
現在我們已經教會了 Unity 如何識別和理解我們的自定義 HID 設備(如 Phoenix SM600 手柄)發送的原始數據,接下來需要設置 Input Actions 并編寫一個腳本來實際讀取這些數據,并將其用于游戲邏輯。
-
創建 Input Actions Asset:
-
在 Unity 項目的?Assets?窗口中,右鍵點擊?Create > Input Actions。
-
給這個新資源文件命名,例如?CustomControllerActions。
-
雙擊打開該資源文件,進入 Input Actions 編輯器。
-
-
定義 Action Map 和 Actions:
-
Action Maps:?在左側面板點擊 "+" 號添加一個新的 Action Map,命名為例如?Gameplay。Action Map 用于組織一組相關的操作(比如所有玩家控制的動作)。
-
Actions:?在中間面板為?Gameplay?Action Map 添加 Actions。根據你的需求定義動作。基于你提供的腳本,我們可能需要讀取至少兩個軸的輸入。**重要:**由于我們在第 2 步中只映射了原始字節,我們需要創建 Actions 來讀取這些原始字節值。
-
點擊 "+" 添加一個 Action,命名為例如?LeftStickVerticalRaw。
-
設置?Action Type?為?Value。
-
設置?Control Type?為?Axis?(或者?Integer?如果你只想讀取原始 0-255 值,但?Axis?通常更靈活用于后續處理)。
-
-
添加另一個 Action,命名為例如?LeftStickHorizontalRaw。
-
同樣設置?Action Type?為?Value?和?Control Type?為?Axis。
-
-
(根據需要添加更多 Actions,例如對應右搖桿的原始字節?RightStickVerticalRaw,?RightStickHorizontalRaw?等)
-
-
-
綁定 Actions 到自定義設備控件:?這是將抽象動作連接到具體設備輸入的關鍵步驟。
-
選中?LeftStickVerticalRaw?Action。
-
在右側的?Properties?面板中,點擊?Path?屬性旁邊的 "+" 號,選擇?Add Binding。
-
在彈出的綁定窗口 (Listen / Path) 中,展開?HID?或你設備繼承的類型(如?Gamepad)。
-
找到你的自定義設備布局名稱(在第 3 步中?InputControlLayout?的?displayName?定義的,例如 "Custom USB HID Device (Raw)" 或 "Phoenix SM600 Drone Controller (Raw)")。
-
展開該設備,找到你在第 2 步中定義的對應搖桿垂直方向的原始字節控件(例如?Data Byte 4?或你在?displayName?里標記的 "左搖桿上下?" 對應的?byte4Raw)。選擇這個原始字節控件。
-
對?LeftStickHorizontalRaw?Action 重復此過程,將其綁定到代表左搖桿水平方向的原始字節控件(例如?Data Byte 5?或?byte5Raw)。
-
(為其他需要讀取的原始字節 Action(如右搖桿)重復綁定過程)
-
完成后,點擊 Input Actions 編輯器窗口頂部的?Save Asset?按鈕。
-
-
編寫或調整輸入讀取腳本:?現在我們使用一個腳本來引用并讀取這些配置好的 Actions。以下是你提供的腳本的一個修正和解釋版本,假設我們讀取上面定義的?LeftStickVerticalRaw?和?LeftStickHorizontalRaw。
using UnityEngine;
using UnityEngine.InputSystem; // 引入 Input System 命名空間public class LeftStickUpRightValueReader : MonoBehaviour // 腳本名稱
{// 使用 [SerializeField] 在 Inspector 中關聯 Action// 這些引用變量將關聯到 Input Actions Asset 中名為 "left" 和 "right" 的 Action[SerializeField]private InputActionReference leftActionForLeftStickUp; // 用于關聯 Input Actions Asset 中名為 "left" 的 Action[SerializeField]private InputActionReference leftActionForLeftStickRight; // 用于關聯 Input Actions Asset 中名為 "left" 的 Action[SerializeField]private InputActionReference rightActionForLeftStickUp; // 用于關聯 Input Actions Asset 中名為 "right" 的 Action[SerializeField]private InputActionReference rightActionForLeftStickRight; // 用于關聯 Input Actions Asset 中名為 "right" 的 Action// Awake 在腳本對象被加載時調用void Awake(){// 檢查引用是否設置if (leftActionForLeftStickUp == null || leftActionForLeftStickUp.action == null) Debug.LogError("Left Action Reference (for LeftStickUp) not set in LeftStickUpRightValueReader.");if (leftActionForLeftStickRight == null || leftActionForLeftStickRight.action == null) Debug.LogError("Left Action Reference (for LeftStickUp) not set in LeftStickUpRightValueReader.");if (rightActionForLeftStickUp == null || rightActionForLeftStickUp.action == null) Debug.LogError("Left Action Reference (for LeftStickUp) not set in LeftStickUpRightValueReader.");if (rightActionForLeftStickRight == null || rightActionForLeftStickRight.action == null) Debug.LogError("Right Action Reference (for LeftStickRight) not set in LeftStickUpRightValueReader.");}// OnEnable 在對象啟用時調用void OnEnable(){// 啟用關聯的 Actionif (leftActionForLeftStickUp != null && leftActionForLeftStickUp.action != null) leftActionForLeftStickUp.action.Enable();if (leftActionForLeftStickRight != null && leftActionForLeftStickRight.action != null) leftActionForLeftStickRight.action.Enable();if (rightActionForLeftStickUp != null && rightActionForLeftStickUp.action != null) rightActionForLeftStickUp.action.Enable();if (rightActionForLeftStickRight != null && rightActionForLeftStickRight.action != null) rightActionForLeftStickRight.action.Enable();}// OnDisable 在對象禁用時調用void OnDisable(){// 禁用關聯的 Actionif (leftActionForLeftStickUp != null && leftActionForLeftStickUp.action != null) leftActionForLeftStickUp.action.Disable();if (rightActionForLeftStickRight != null && rightActionForLeftStickRight.action != null) rightActionForLeftStickRight.action.Disable();}// Update 每幀調用一次void Update(){// 讀取 Action 的當前值 (Float 類型)// "left" Action 現在對應 leftStick/up 的值 (0 ~ ~1)float leftStickUpValue = 0f;if (leftActionForLeftStickUp != null && leftActionForLeftStickUp.action != null){leftStickUpValue = leftActionForLeftStickUp.action.ReadValue<float>();}float leftStickRightValue = 0f;if (leftActionForLeftStickRight != null && leftActionForLeftStickRight.action != null){leftStickRightValue = leftActionForLeftStickRight.action.ReadValue<float>();}float RightStickUpValue = 0f;if (rightActionForLeftStickUp != null && rightActionForLeftStickUp.action != null){RightStickUpValue = rightActionForLeftStickUp.action.ReadValue<float>();}// "right" Action 現在對應 leftStick/right 的值 (0 ~ ~1)float RightStickRightValue = 0f;if (rightActionForLeftStickRight != null && rightActionForLeftStickRight.action != null){RightStickRightValue = rightActionForLeftStickRight.action.ReadValue<float>();}Debug.Log($"Action \"left\" (左搖桿Up): {RightStickUpValue:F2} | Action \"right\" (左搖桿Right): {leftStickRightValue:F2}" );// --- 每幀輸出這兩個值到 Console ---Debug.Log($"Action \"left\" (左搖桿Up): {leftStickUpValue:F2} | Action \"right\" (左搖桿Right): {RightStickRightValue:F2}");// {值:F2} 用于格式化輸出,保留兩位小數// leftStickUpValue 的范圍是 0 到 ~1:// 0 代表沒有向上推,~1 代表完全向上推。s// leftStickRightValue 的范圍是 0 到 ~1:// 0 代表沒有向右推,~1 代表完全向右推。// 當左搖桿回中時,這兩個值都應該是 0。// 當你推向左上角時,leftStickUpValue 和 leftStickRightValue 都會大于 0。// 在這里你可以根據 leftStickUpValue 和 leftStickRightValue 的值來控制你的無人機行為。// 例如:你可以結合這兩個值來判斷左搖桿的推向方向和力度,用于無人機的水平移動等。}// 注意: 使用 InputActionReference 時,通常不需要手動 Dispose
}將腳本添加到場景并配置:
-
在 Unity 場景中創建一個空的游戲對象(GameObject),或者選擇一個你想用來處理輸入的現有對象。
-
將上面編寫的?CustomDeviceInputReader.cs?腳本拖拽到這個游戲對象的 Inspector 面板上。
-
你會看到腳本組件上有?Left Stick Vertical Raw Action?和?Left Stick Horizontal Raw Action?兩個字段(以及你可能添加的其他字段)。
-
點擊每個字段旁邊的圓形圖標,或者直接將你在?CustomControllerActions?資源文件中定義的相應 Action(例如?Gameplay/LeftStickVerticalRaw)拖拽到對應的字段上。
-
確保這個掛載了腳本的游戲對象在場景中是激活(Active)的。
運行與測試:
-
連接你的自定義 HID 設備。
-
運行 Unity 場景。
-
觀察 Console 窗口的輸出。當你移動手柄的左搖桿時,你應該能看到?Raw Left Stick?的字節值 (0-255) 和?Processed Left Stick?的標準化值 (-1 to +1) 相應地變化。
-
根據輸出調整?NormalizeByteAxis?函數中的邏輯(特別是中心值 128 和除數 127/128),以確保靜止時軸值接近 0,推到極限時接近 -1 或 +1。
下一步/優化:
-
直接映射標準控件:?如果你確定了哪些原始字節對應標準的游戲手柄控件(如左搖桿、右搖桿、按鈕),可以回到第 2 步和第 3 步,修改設備布局 (struct?和?class)。使用 Input System 提供的更高級的?InputControl?布局(如?StickControl,?ButtonControl),并在?FinishSetup()?方法中將原始字節數據處理后映射到這些標準控件上。這樣做的好處是,你的 Input Actions 可以直接綁定到標準的?leftStick,?rightStick,?buttonSouth?等路徑,使輸入配置更通用,讀取腳本也更簡單(可以直接?ReadValue<Vector2>()?獲取搖桿值)。但這需要對設備的數據格式有更深入的理解。
-
處理按鈕:?按鈕通常隱藏在某個字節的特定位(bit)中。需要使用位運算(如?&?按位與)來檢查特定位是否為 1,以判斷按鈕是否按下。同樣可以在設備布局中定義?ButtonControl?并進行映射。
現在,你應該擁有一個完整的流程:從識別未知 HID 設備、定義其數據布局、在 Unity Input System 中注冊它,到最后通過 Input Actions 讀取其(目前是原始的)輸入值并在游戲中使用。
?
題解)












)
實現指南)




