目錄
- 狀態空間建模與極點配置 —— 理論、案例與交互式 GUI 實現
- 一、引言
- 二、狀態空間建模的基本理論
- 2.1 狀態空間模型的優勢
- 2.2 狀態空間模型的物理意義
- 三、極點配置的理論與方法
- 3.1 閉環系統的狀態反饋
- 3.2 極點配置條件與方法
- 3.3 設計流程
- 四、狀態空間建模與極點配置的優缺點分析
- 4.1 優點
- 4.2 缺點
- 五、典型案例分析
- 5.1 案例一:二階機械系統的狀態反饋設計
- 5.1.1 案例描述
- 5.1.2 分析過程
- 5.2 案例二:多輸入系統中的極點配置
- 5.2.1 案例描述
- 5.2.2 分析過程
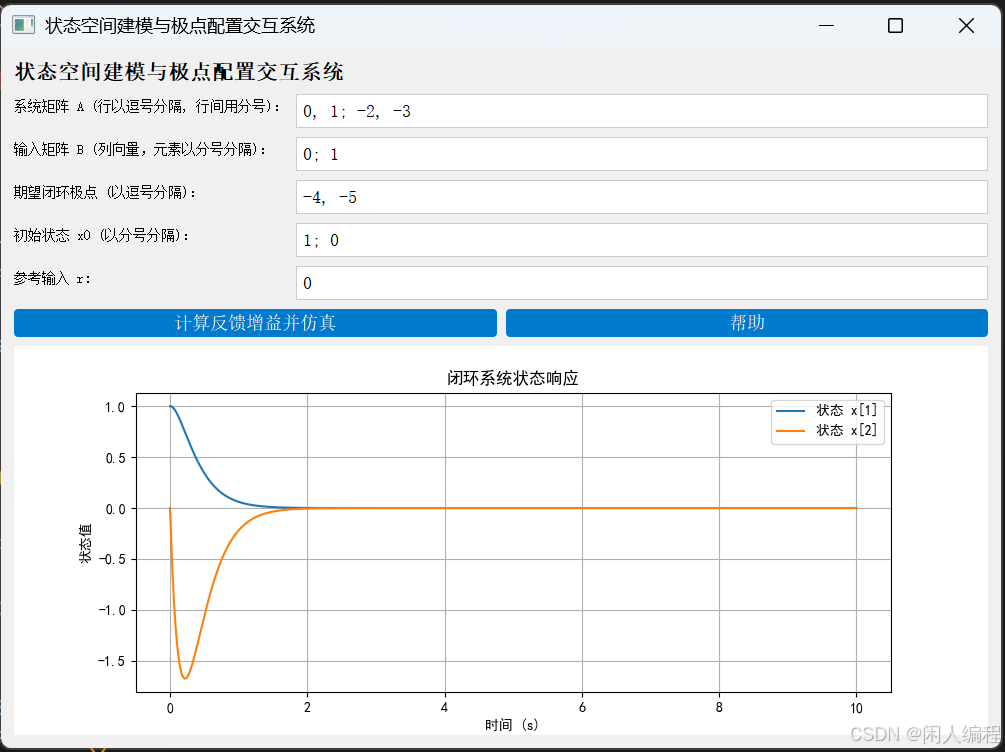
- 六、基于 PyQt6 的交互式 GUI 實現
- 七、Python 代碼實現
- 八、結語
狀態空間建模與極點配置 —— 理論、案例與交互式 GUI 實現
一、引言
在現代控制理論中,狀態空間建模已成為描述和分析動態系統的主要工具。與傳統的傳遞函數方法相比,狀態空間模型能夠全面描述系統的動態特性,不僅適用于多輸入多輸出(MIMO)系統,而且便于處理時變和非線性問題。利用狀態空間模型,我們可以將系統描述為一組一階微分方程,從而揭示系統內在的狀態信息及其隨時間的演變規律。
另一方面,極點配置是一種基于狀態反饋設計的控制方法,其核心思想是通過適當選擇反饋增益 K K K,使得閉環系統矩陣 A ? B K A-BK A?BK 的特征值(即極點)滿足預定的動態性能指標。極點配置不僅可以實現快速響應、低超調和良好的穩態誤差等性能要求,還為控制器設計提供了一種系統化的思路。
本文將從狀態空間建模與極點配置的基本原理入手,詳細介紹數學建模、極點配置的設計方法以及實現步驟;隨后,結合多個實際案例,展示該方法在實際工程中的應用;最后,提供一份基于 Python 與 PyQt6 的交互式 GUI 程序代碼示例,幫助工程師和研究者在仿真平臺上直觀體驗狀態空間建模與極點配置的實際效果。
二、狀態空間建模的基本理論
狀態空間模型是一種用狀態變量描述動態系統的方法,其基本形式為
x ˙ ( t ) = A x ( t ) + B u ( t ) , y ( t ) = C x ( t ) + D u ( t ) , \begin{aligned} \dot{x}(t) &= A x(t) + B u(t), \\\\ y(t) &= C x(t) + D u(t), \end{aligned} x˙(t)y(t)?=Ax(t)+Bu(t),=Cx(t)+Du(t),?
其中:
- x ( t ) ∈ R n x(t) \in \mathbb{R}^n x(t)∈Rn 為狀態向量,描述系統內部的能量、位置、速度等信息;
- u ( t ) ∈ R m u(t) \in \mathbb{R}^m u(t)∈Rm 為輸入向量;
- y ( t ) ∈ R p y(t) \in \mathbb{R}^p y(t)∈Rp 為輸出向量;
- A ∈ R n × n A \in \mathbb{R}^{n \times n} A∈Rn×n、 B ∈ R n × m B \in \mathbb{R}^{n \times m} B∈Rn×m、 C ∈ R p × n C \in \mathbb{R}^{p \times n} C∈Rp×n、 D ∈ R p × m D \in \mathbb{R}^{p \times m} D∈Rp×m 分別為系統的狀態矩陣、輸入矩陣、輸出矩陣和直接傳遞矩陣。
2.1 狀態空間模型的優勢
狀態空間模型具有以下顯著優勢:
- 適用范圍廣:適用于多輸入多輸出系統,能夠描述復雜的高維系統。
- 時域描述直觀:利用狀態變量可以直接描述系統動態行為,便于分析瞬態響應和穩定性問題。
- 擴展性好:易于擴展到時變和非線性系統,通過線性化方法仍可在局部區域應用。
- 現代控制設計基礎:為極點配置、最優控制、魯棒控制等現代控制方法提供理論基礎。
2.2 狀態空間模型的物理意義
在實際工程中,狀態變量通常代表系統中的物理量,如機械系統中的位置、速度和加速度;電路系統中的電壓、電流;化工過程中的濃度、溫度等。利用狀態空間模型,可以將系統內部各物理量之間的關系通過矩陣形式表達,從而為后續的控制器設計提供直觀的數學描述。
例如,一個簡單的二階機械系統的狀態空間模型可以寫為
x ˙ 1 ( t ) = x 2 ( t ) , x ˙ 2 ( t ) = ? k m x 1 ( t ) ? b m x 2 ( t ) + 1 m u ( t ) , \begin{aligned} \dot{x}_1(t) &= x_2(t), \\\\ \dot{x}_2(t) &= -\frac{k}{m} x_1(t) - \frac{b}{m} x_2(t) + \frac{1}{m} u(t), \end{aligned} x˙1?(t)x˙2?(t)?=x2?(t),=?mk?x1?(t)?mb?x2?(t)+m1?u(t),?
其中 x 1 ( t ) x_1(t) x1?(t)</





任務書)

解析一)









)

(詳解))