
個人主頁~
進程信號的捕捉處理
- 一、信號捕捉處理的概述
- 1、信號捕捉處理全過程
- 2、用戶態和內核態的區別
- (一)用戶態
- (二)內核態
- (三)用戶態與內核態的切換
- (四)硬件條件
- 二、再談進程地址空間
- 操作系統本質
- 三、系統調用函數
- 四、其他補充內容
- 1、可重入函數
- 2、volatile關鍵字
一、信號捕捉處理的概述
1、信號捕捉處理全過程
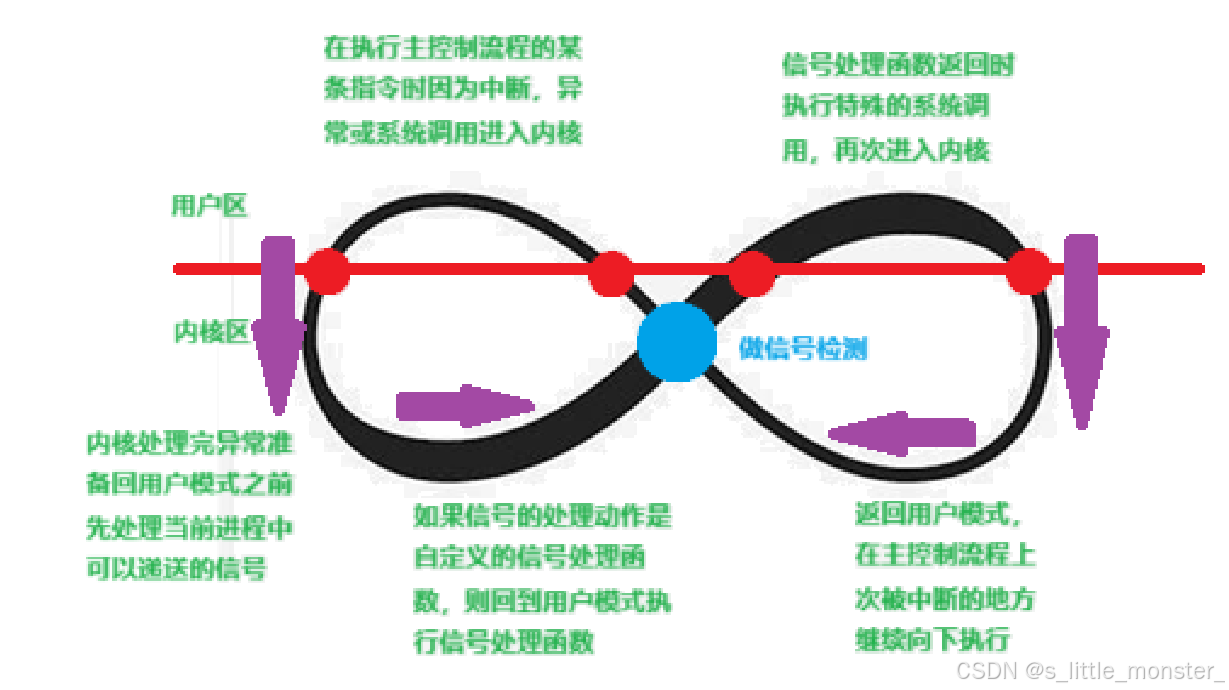
如果信號的處理動作是用戶自定義函數,在信號遞達時就調用這個函數,這稱為捕捉信號,這個我們前面說過,但是我們的過程是比較復雜的,首先我們在執行主控制流程的某條指令時因為系統調用等原因會進入內核,然后內核處理完成后發送信號,如果信號的處理動作是自定義的信號處理函數就回到用戶區執行信號處理函數,執行完之后因為信號處理函數的特殊性,它要再次進入內核區,然后回到用戶模式繼續執行
我們在用戶區和內核區來回切換的時候,操作系統負責做我們的身份(用戶身份和內核身份)切換工作,用戶態陷入內核態是通過匯編指令int 80完成的
在進程從內核態返回用戶態時進行信號的檢測和處理
并且main函數和自定義信號捕捉處理函數使用不同的堆棧空間,它們之間不存在調用和被調用的關系
2、用戶態和內核態的區別
用戶態和內核態是操作系統中CPU的兩種運行狀態,它們在訪問權限、資源使用等方面存在顯著差異,以下是對這兩種狀態的標準解釋:
(一)用戶態
用戶態是操作系統為普通用戶程序提供的一種運行模式,在用戶態下運行的程序擁有較低的特權級別,只能訪問受限的系統資源和執行特定的操作,大部分用戶編寫的應用程序(如文本編輯器、瀏覽器等)都是在用戶態下運行的
用戶態程序只能訪問自己的內存空間,不能直接訪問系統的核心資源,如硬件設備、操作系統內核的數據結構等,并且只能執行一部分指令,一些具有高風險或對系統影響較大的指令(如修改系統時鐘、控制硬件中斷等)是被禁止執行的
由于用戶態程序的權限受到限制,即使程序出現錯誤(如內存越界、死循環等),也不會對整個操作系統造成嚴重影響,只會影響到該程序自身
(二)內核態
內核態是操作系統內核運行的模式,具有最高的特權級別,操作系統內核負責管理系統的核心資源,如內存、進程、文件系統、設備驅動等,因此需要在高特權的內核態下運行
內核態程序可以訪問系統的所有資源,包括硬件設備、內核數據結構、所有進程的內存空間等,并且可以執行所有的 CPU 指令,包括那些在用戶態下被禁止執行的特權指令,這些特權指令可以用于實現系統的關鍵功能,如進程調度、內存管理、中斷處理等
由于內核態程序具有最高的權限,一旦內核態程序出現錯誤,可能會導致整個操作系統崩潰或出現嚴重的系統故障
(三)用戶態與內核態的切換
在操作系統的運行過程中,程序需要在用戶態和內核態之間進行切換,以完成不同的任務,常見的切換場景包括:
- 系統調用:當用戶態程序需要訪問系統資源或執行特權操作時,會通過系統調用(如
open、read、write等)請求操作系統內核的服務,在執行系統調用時,程序會從用戶態切換到內核態,由操作系統內核來處理請求,處理完成后再切換回用戶態 - 中斷處理:當系統發生硬件中斷(如時鐘中斷、鍵盤中斷等)或軟件中斷(如異常、陷阱等)時,CPU 會自動從用戶態切換到內核態,由操作系統內核來處理中斷事件,處理完成后,根據情況決定是否切換回用戶態
但是操作系統是不相信用戶的,所以用戶態和內核態進行切換的時候是操作系統完成的
(四)硬件條件
在 CPU 中有一個ecs寄存器,它的后兩個bit位就標記了當前是處于用戶態還是內核態,其中 00 表示處于內核態,11 表示處于用戶態,int 80 指令本質上就是將 11 修改成 00
二、再談進程地址空間
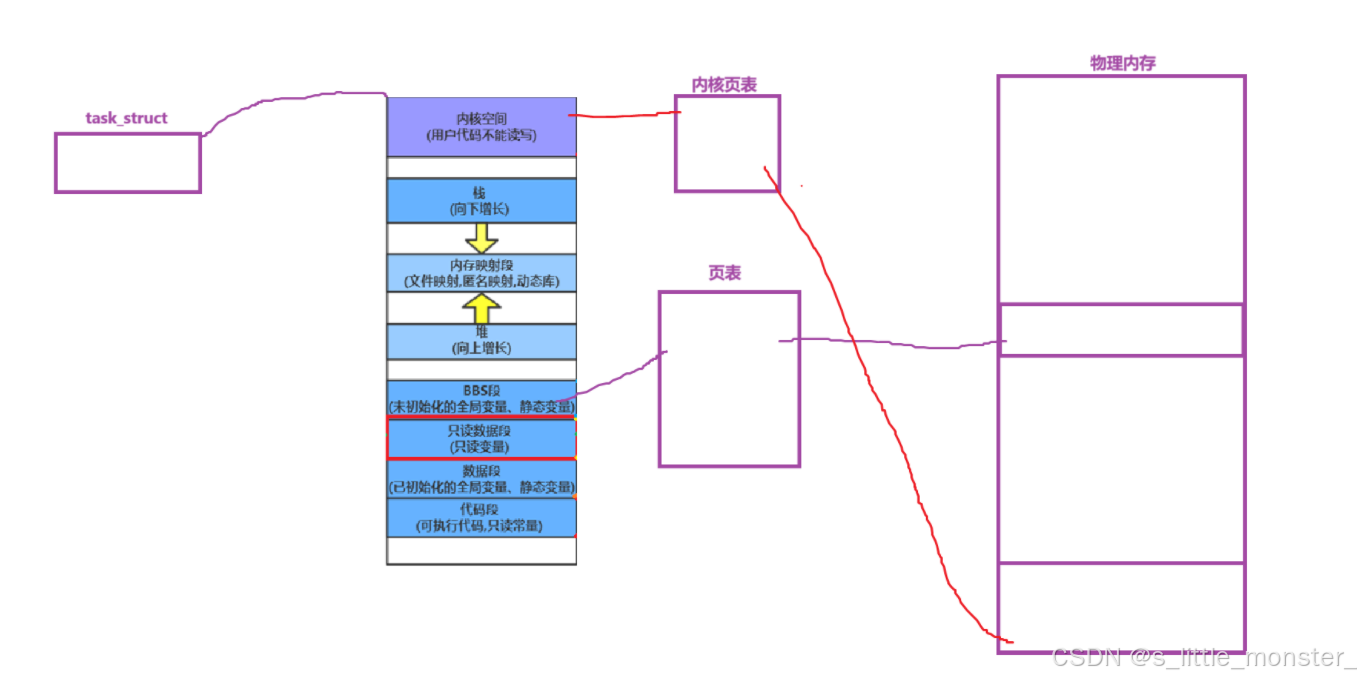
我們再來拿出我們的老圖,我們知道,每個進程都有一個PCB,然后PCB中有一個結構體叫做mm_struct,又被稱為進程地址空間,就是我們常說的虛擬地址,虛擬地址通過頁表和MMU映射到物理內存上,可以說頁表就是虛擬內存和物理內存之間的橋梁,每個進程都會有一個頁表,但是,這是對于用戶區空間來說的,我們的內核空間,實際上也是有一個內核頁表,這個內核頁表是唯一的,內核空間中的數據也是唯一的,我們不同的進程,它們用戶區空間的代碼和數據不同,但是內核空間的數據一定相同,所有進程共享一份內核空間以及一份內核頁表
對于進程來說,去調用系統調用接口,就是在我自己的地址空間中執行的,對于操作系統來說,任何一個時刻都有進程執行,我們想執行操作系統的代碼就可以隨時執行
操作系統本質
操作系統的本質就是一個基于時鐘中斷的一個死循環,這里的時鐘中斷與STM32中的《TIM定時器》(學習STM32的可以點開看一下,沒有學習就算了,不影響理解)類似,都是每隔很短的時間向計算機發送時鐘中斷,操作系統在收到時鐘中斷后,就去中斷向量表中執行相應的進程調度之類的方法
三、系統調用函數
sigaction用于設置或檢查信號處理行為的系統調用函數
#include <signal.h>
int sigaction(int signo, const struct sigaction *act, struct sigaction *oact);
返回值:成功返回0,失敗返回-1
signo:需要處理的信號編號
act:輸入型參數,指向struct sigaction結構體,用于指定新的信號處理動作
oact:輸出型參數,指向struct sigaction結構體,用于保存原來的信號處理動作
其中結構體sigaction是這樣的
struct sigaction {void (*sa_handler)(int); // 信號處理函數指針,或SIG_IGN(忽略信號)、SIG_DFL(使用默認處理)void (*sa_sigaction)(int, siginfo_t *, void *); //另一種信號處理函數指針,用于處理帶附加信息的信號sigset_t sa_mask; //在信號處理函數執行期間需要阻塞的信號集int sa_flags; //控制信號處理行為的標志位void (*sa_restorer)(void); //已棄用,通常設為 NULL
};
其中我們主要研究兩個成員:sa_handler,sa_mask
這里我們說一個結論,就是信號處理函數在處理信號時,是不再接受新的信號的,在該信號處理函數被調用時,在剛要調用的某個時間,內核會自動將當前信號加入到進程的信號屏蔽字中,這就可以實現在處理某個信號的過程中,不會被這個信號反復打擾,如果這個信號再次產生,它會被阻塞到當前函數處理結束,如果在當前信號被阻塞以外,還想要屏蔽其他的一些信號,則動用sa_mask說明要額外屏蔽的信號
#include <iostream>
#include <signal.h>
#include <cstring>
#include <unistd.h>using namespace std;void PrintPending()
{sigset_t set;//將當前被阻塞且處于未決狀態的信號集存儲到set信號集中(輸出型參數)sigpending(&set);//打印set位圖(即pending位圖)for (int signo = 31; signo >= 1; signo--){if (sigismember(&set, signo))cout << "1";elsecout << "0";}cout << endl;
}void handler(int signo)
{//收到2號信號打印一句收到了,然后循環調用PrintPendingcout << "catch a signal, signal number : " << signo << endl;while (true){PrintPending();sleep(1);}
}int main()
{//創建并初始化act和oactstruct sigaction act, oact;memset(&act, 0, sizeof(act));memset(&oact, 0, sizeof(oact));//設置sa_mask為全0sigemptyset(&act.sa_mask);//設置信號屏蔽sigaddset(&act.sa_mask, 1);sigaddset(&act.sa_mask, 3);sigaddset(&act.sa_mask, 4);//設置信號處理函數為handleract.sa_handler = handler; // SIG_IGN SIG_DFL//需要處理的就是2號信號sigaction(2, &act, &oact);while (true){cout << "I am a process: " << getpid() << endl;sleep(1);}return 0;
}

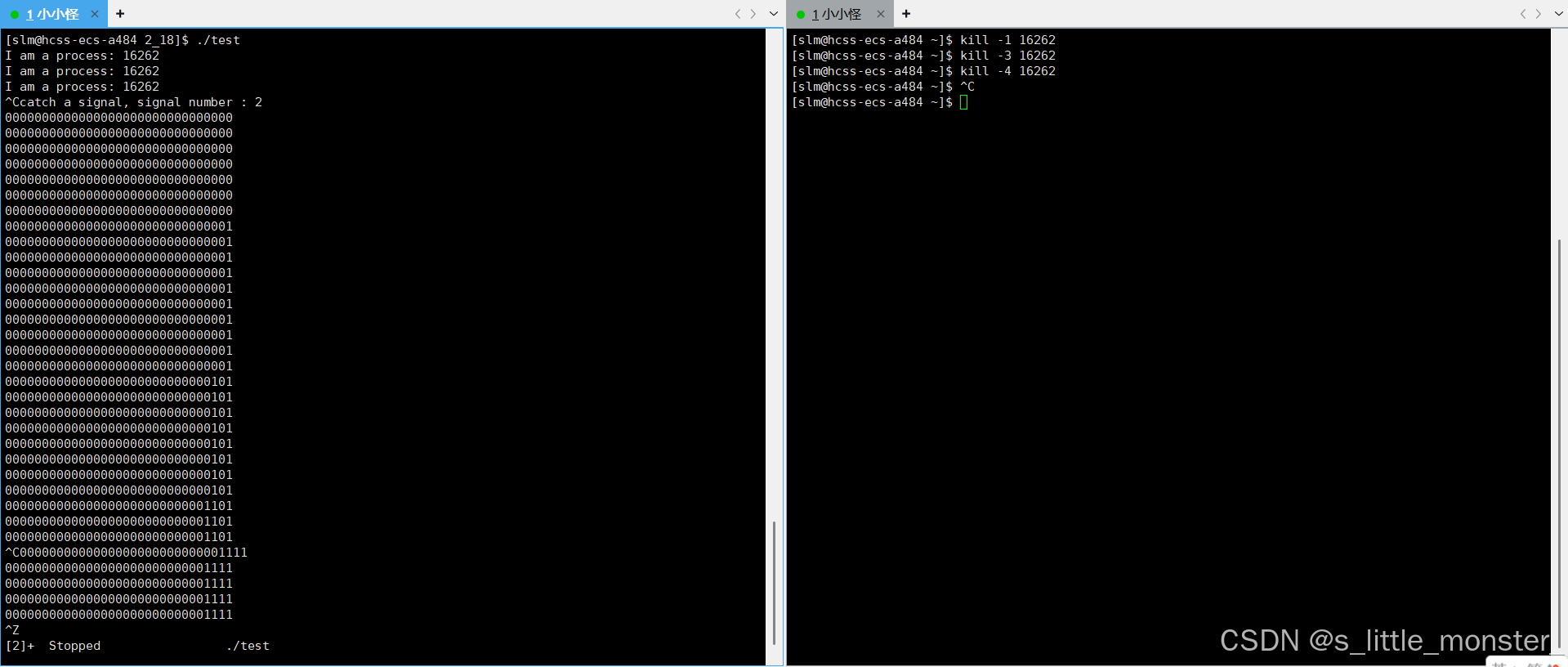
正常情況下,我們沒有發送任何信號,1號信號會將進程終止,當我們發送2號信號,sigaction函數將信號捕捉后,我們進入到handler函數,開始打印全0的pending位圖,此時屬于信號處理函數處理信號的過程,然后我們發送1234號信號,因為134號信號我們提前設置進sa_mask當中了,所以我們在發送信號的時候對應的比特位就會由0置1,表示阻塞通過
四、其他補充內容
1、可重入函數
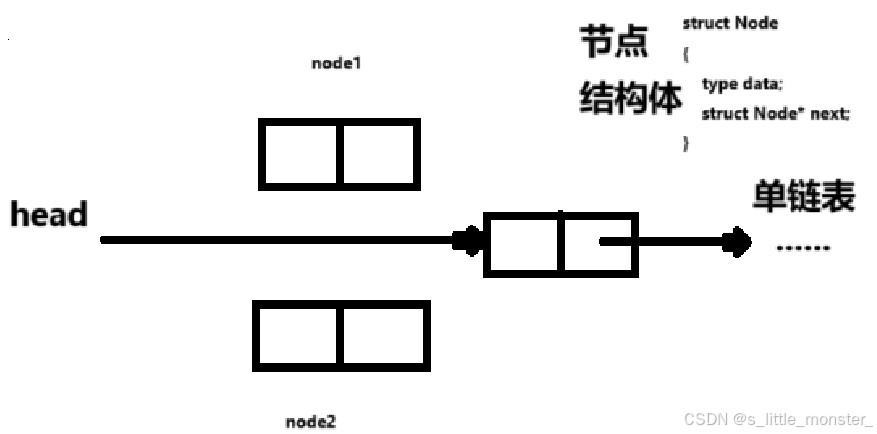
這是一個正常的單鏈表,node1和node2是兩個待插入節點,其中,我們要頭插node1,其方法就是將next指針指向現在的頭節點,再將自己賦值給頭節點
insert(struct Node* node)
{node->next = head;head = node;
}
但是在node1->next = head;執行完畢后,還沒來得及執行head = p;突然來了一個信號,這個信號剛好被捕捉了,執行自定義動作,剛好自定義動作是將node2頭插
void handler(int signo)
{insert(&node2);
}
insert(struct Node* node)
{node->next = head;head = node;
}
執行完這個信號處理函數后再返回執行main函數中的代碼
這樣一來我們實際上的代碼就變成了
node1->next = head;
node2->next = head;
head = &node2;
head = &node1;

這樣上面node1是頭插進去了,但是node2是不可能通過單鏈表的接口訪問到了,這個節點就丟失了,這樣就會導致內存泄漏
如果一個函數像上面一樣被重復進入的情況下,出錯或者可能出錯,就叫做不可重入函數,否則就叫做可重入函數,我們學習到的大部分函數都是不可重入函數,因為只要是涉及指針改指向的問題,基本上都是不可重入的
2、volatile關鍵字
volatile是一個類型修飾符,用于告知編譯器它修飾的內容拒絕優化
該程序在收到2號信號之前一直在while循環中啥也不干,收到2號信號執行handler打印,設置flag為1,然后繼續while判斷,從這里開始就變得不一樣了

我們可以看到我們編譯的方法加了-O1選項,這個叫做優化,一共有-O0 -O1 -O2 -O3四種種優化等級,其中O0是無優化
這是加了volatile的關鍵詞產生的結果,按下ctrl+c打印執行后,flag置1,while判斷繼續向后執行,打印,程序結束

這是不加volatile的關鍵詞產生的結果,按下ctrl+c打印執行后,flag置1,怎么不往下執行了呢,我再次按下ctrl+c打印再次執行

這里就是優化的問題,優化其實是CPU管理資源的一種方式,優化后,CPU在第一次讀取flag的時候,將其加載到CPU寄存器中,handler結束后進行while的判斷時,直接判斷CPU上的這個flag,不再去物理內存當中尋找,因為這樣的尋找是耗費資源的,加了volatile關鍵字后,不再產生優化,在判斷時判斷的就是物理內存中的flag值
所以,涉及到要隨時了解某些變量的狀態的時候,這些變量在優化的時候最好用volatile修飾一下
今日分享就到這了~














![Muduo網絡庫實現 [九] - EventLoopThread模塊](http://pic.xiahunao.cn/Muduo網絡庫實現 [九] - EventLoopThread模塊)

面向對象--封裝(6)C#中的拓展方法與運算符重載: 讓代碼更“聰明”的魔法)



