1、相機選型
在選擇機器視覺相機時,通常需要考慮以下幾個方面:
1、分辨率:相機的分辨率決定了其拍攝圖像的清晰度和細節程度。根據具體的應用需求,可以選擇適當的分辨率范圍。
2、幀率:幀率表示相機每秒鐘能夠拍攝的圖像幀數,對于一些快速運動的物體或需要實時處理的場景,高幀率的相機可能更為合適。
3、接口:相機的接口類型包括USB、GigE、Camera Link、CoaXPress等,需要根據實際情況選擇合適的接口以便與其他設備連接和數據傳輸。
4、光學參數:包括鏡頭類型、焦距、光圈等,根據具體應用需要選擇適當的光學參數。
5、高速成像能力:對于一些需要進行高速成像或快速檢測的應用,需要選擇具有高速成像能力的相機。
6、環境適應能力:一些特殊的工業環境可能對相機有特殊的要求,比如防塵防水、耐高溫等能力。
7、支持的軟件和平臺:相機所支持的軟件開發工具和平臺也是選擇的考量因素之一,這將影響到后續的圖像處理和數據分析工作。
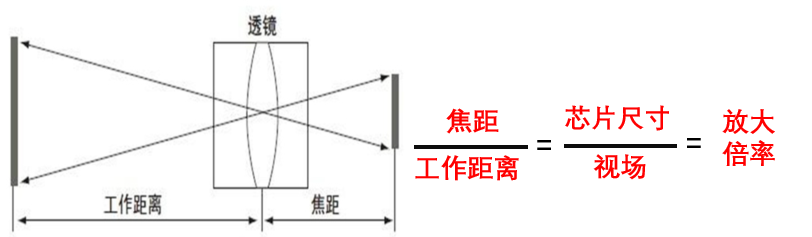

焦距: 指鏡頭光學后主點到焦點的距離。鏡頭焦距的長短決定著拍攝的工作距離、成像大小、視場角大小及景深大小。常用的FA鏡頭焦距為4mm、6mm、8mm、12mm、16mm、25mm、35mm、50mm、75mm等。
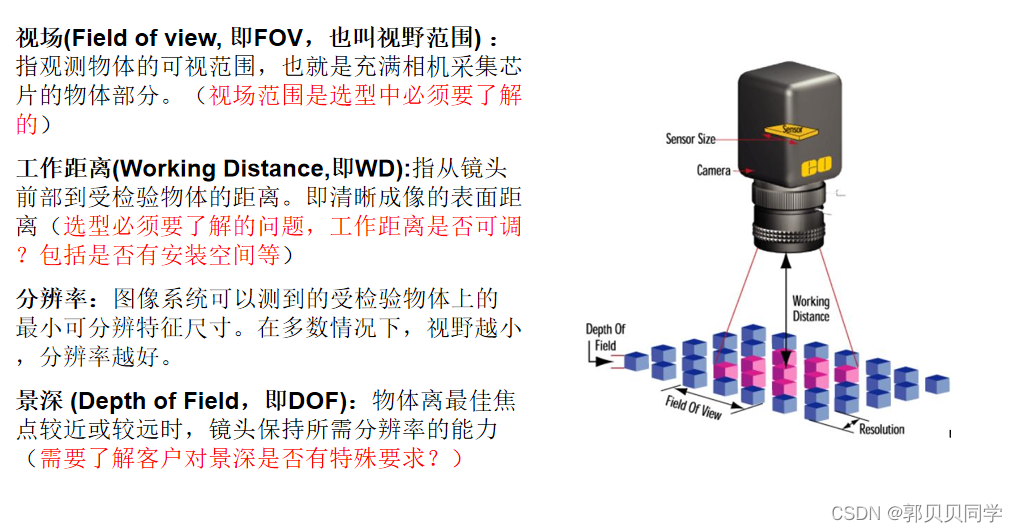
工作距離: 目標到鏡頭之間的距離
視場/視場角: 指鏡頭能觀測到的實際范圍的物理尺寸,可以用視場 “ 長x寬 ” 或者 ” 視場角 ”表示
放大倍率: 光學放大倍率用 ” β”表示
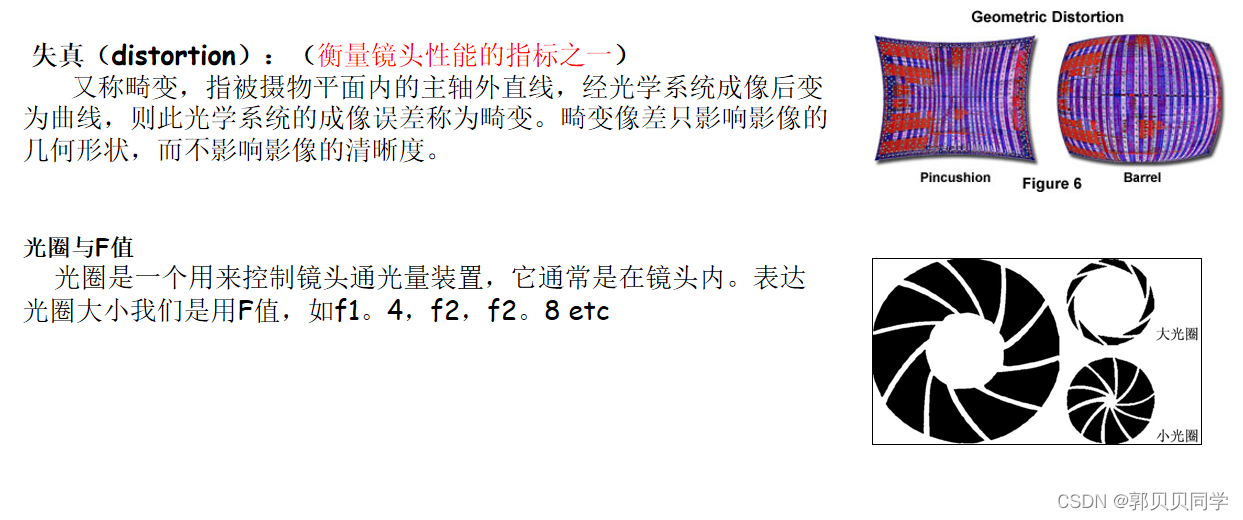
光圈: 控制鏡頭通光量的光學裝置,光圈數一般用F值表示,常用值為1.4、2、2.8、4、5.6、8、11
光圈數F=焦距f/通光孔徑d,F數越小,通光孔徑越大,光圈越大
靶面尺寸(靶面尺寸是指攝像機或相機傳感器的有效成像區域的物理尺寸。)
1英寸——靶面尺寸為寬 12.8mm高 9.6mm
1.1英寸——靶面尺寸為寬 12mm高 12mm
4/3 英寸——靶面尺寸為寬18.5mm高 13.5mm
1/4英寸——靶面尺寸為寬 2.4mm高 3.2mm
1/3.6英寸——靶面尺寸為寬4mm高 3mm
1/3.2 英寸——靶面尺寸為寬4.54mm高 3.42mm
1/3英寸——靶面尺寸為寬4.8mm高 3.6mm
1/2.5英寸——靶面尺寸為寬 5.76mm高4.29mm
1/2.3 英寸——靶面尺寸為寬 6.16mm高4.62mm
1/2 英寸——靶面尺寸為寬6.4mm高 4.8mm
1/1.8 英寸——靶面尺寸為寬 7.18mm高 5.32mm
1/1.7 英寸——靶面尺寸為寬 7.6mm高 5.7mm
2/3 英寸——靶面尺寸為寬 8.8mm*高 6.6mm
檢測精度
視野:
視覺系統視野要比實際產品稍大1/5
視覺精度:
理論視覺精度>實際精度 (一般實際精度對應3~5個像素)
計算公式:
單邊視野/視覺精度=單邊分辨率
相機芯片一般比例為3 : 4
相機選型案例
產品尺寸30mm * 20mm,公差大小±0.1mm,相機如何選擇?
視覺精度=產品尺寸大小/10
視覺精度=0.1mm/10=0.01mm
相機視野要比產品尺寸稍大:35mm * 25mm
單邊分辨率=35/0.01=3500 25/0.01=2500
3500 * 2500=875萬像素 選擇890萬(4096 * 2160)即可
運動拍攝
拍攝場景:
飛拍(運動拍照),精準的體現出了全局曝光 的優勢
**曝光方式:**全局曝光、考慮不產生拖影
計算公式:
曝光時間內,移動距離不超過一個像元尺寸
理論曝光時間Tmax=S像/V像
運動拍攝相機選型案例
產品運動速度為200mm/s,視覺精度為0.015mm,視野大小30mm * 20mm,6pc/s,相機該如何選擇?
相機分辨率 = (30/0.015)*(20/0.015)=266.6萬像素
每秒6pcs產品,相機幀率要大于6幀;
運動拍攝,理論曝光時間T<0.015/200=75us
綜上,可選擇320萬(2048*1536)全局相機
計算公式總結:
- 視覺精度 = 公差大小 / 10
- 單邊分辨率 = 視野的大小或產品尺寸(長或寬)/ 視覺精度(像素)/ 2(亞像素)
- 選擇的像素=單邊分辨率(長)* 單邊分辨率(寬)
- 焦距(f)=工作距離(鏡頭到目標的距離 WD)* 芯片尺寸( CCD靶面型號的尺寸)/ 視場大小或者物體高度(FOV)
- 光學放大倍數 = 芯片尺寸( CCD靶面型號的尺寸)/ 視場大小或者物體高度(FOV)
- 系統放大倍率 = 芯片短邊( CCD靶面型號的尺寸)/ 視野短邊
- 工作距離(WD)=焦距(f)* 芯片尺寸( CCD靶面型號的尺寸) / 視場大小或者物體高度(FOV)
- 工作距離(WD)=焦距(f)/ 倍率
- 視場大小或者物體高度(FOV)=工作距離(WD)* 芯片尺寸( CCD靶面型號的尺寸)/ 焦距(f)
- 芯片尺寸(CCD靶面型號的尺寸) = 像元尺寸(長或寬)* 單邊分辨率(長或寬)/ 1000(轉mm)
- 工作高度 = 焦距 / 倍率
2、工業鏡頭選型
鏡頭物理接口類型
鏡頭的接口尺寸是有國際標準的,共有三種接口型式,即F型、C型、CS型。F型接口是通用型接口,
一般適用于焦距大于25mm的鏡頭;而當鏡頭的焦距約小于25mm時,因鏡頭的尺寸不大,
便采用C型或CS型接口。
鏡頭參數
焦距(f) 焦距,是光學系統中衡量光的聚集或發散的度量方式,指從透鏡的光心到光聚集之焦點的距離。亦是照相機中,從鏡片中心到底片或CCD等成像平面的距離。
公式:
(焦距)f={工作距離/視野范圍長邊(或短邊)}X CCD長(或短)
焦距大小的影響情況:焦距越小,景深越大; 焦距越小,畸變越大; 焦距越小,漸暈現象越嚴重,使像差邊緣的照度降低。
工業鏡頭選型案例
案例分析:
已知條件:工業相機型號已經選擇好,具體參數:工業相機芯片尺寸為2/3",C接口,5百萬像素;
視野是100*100mm, 工作距離:500mm;
根據以上條件,我們來選擇合適的工業鏡頭;
鏡頭接口: 首先工業鏡頭要和工業相機接口一致,所以這里也選擇C接口;
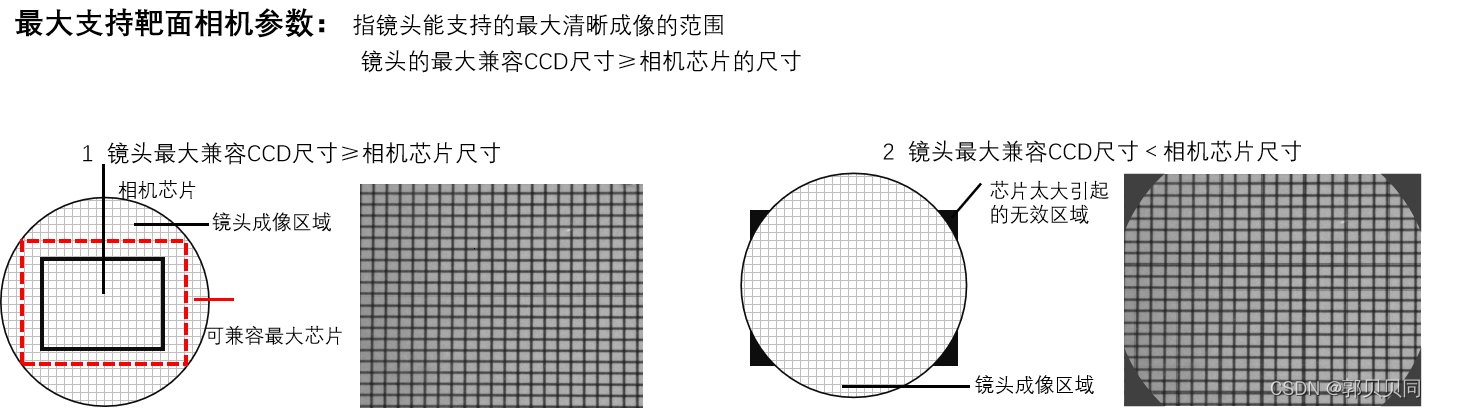
鏡頭大小: 遵循鏡頭大小要大于相機的芯片大小,所以這里鏡頭尺寸最少支持2/3";
鏡頭分辨率: 鏡頭的分辨率要高于相機的分辨率,所以選擇5百萬像素以上;
焦距: 500(工作距離)× 8.8(芯片水平長度)/ 100(視野)=44mm;
鏡頭放大倍率: 8.8(芯片水平長度)/ 100=0.088
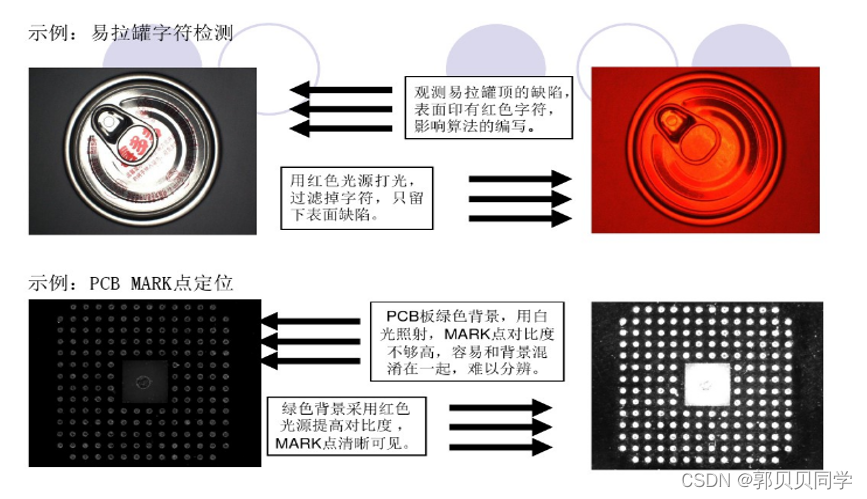
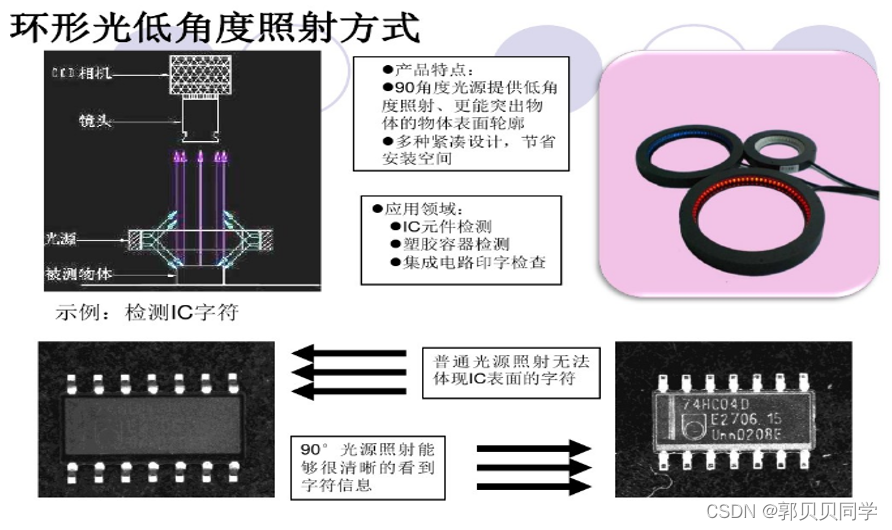
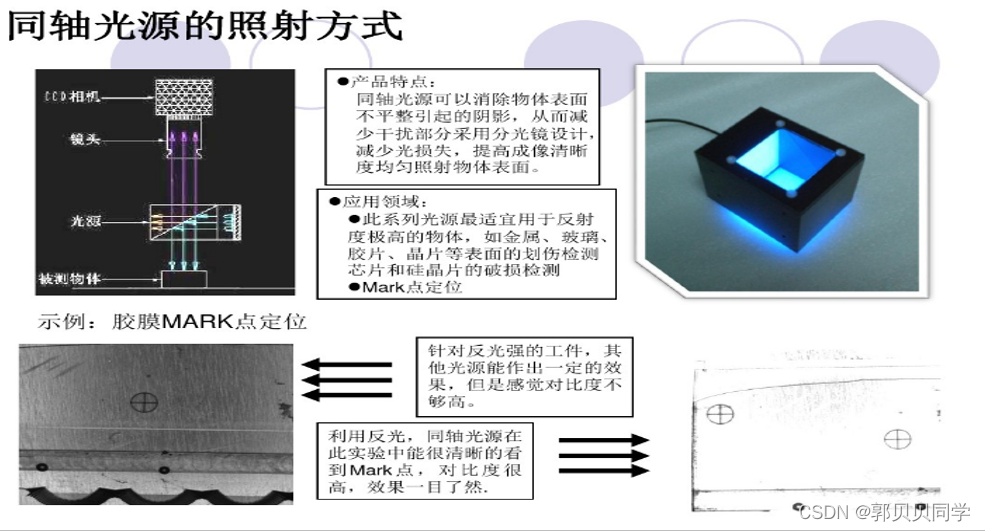
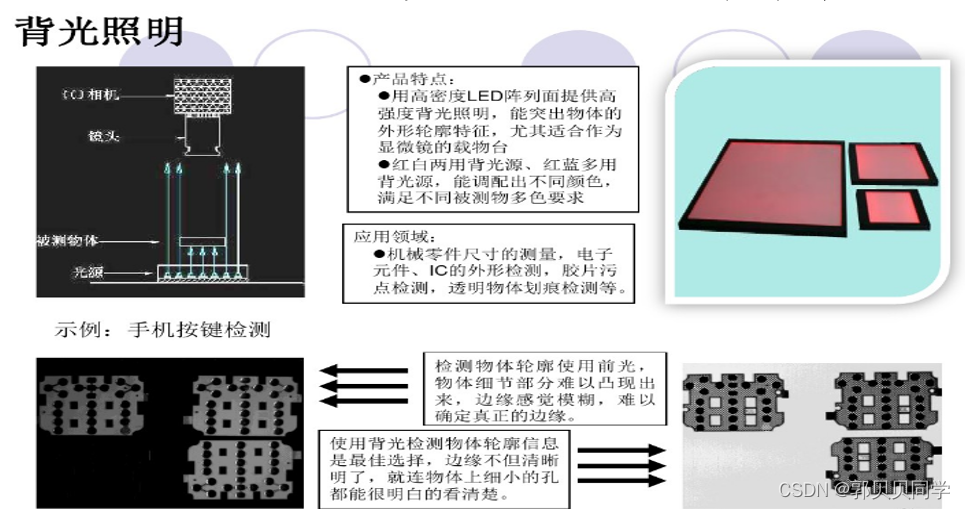
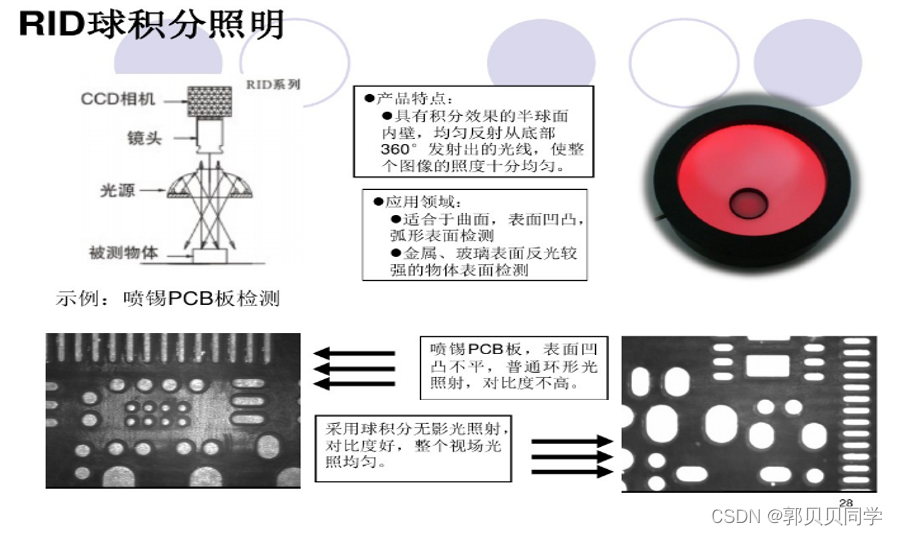
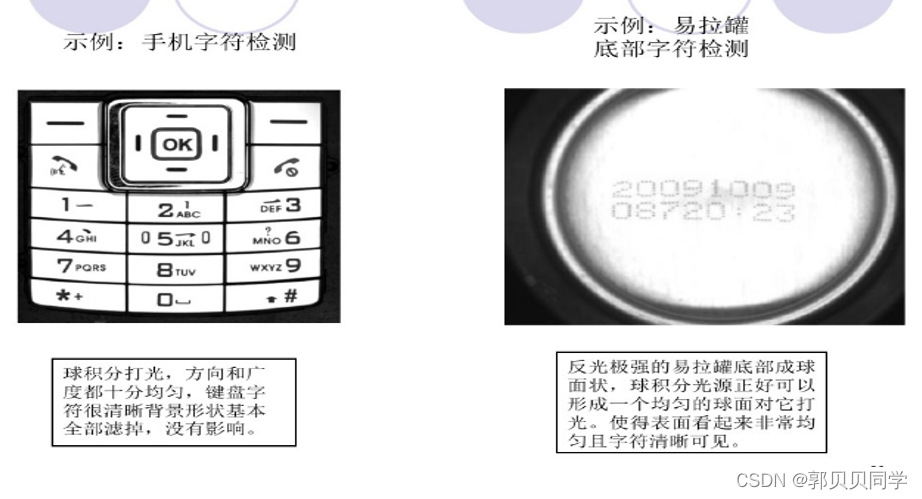
3、光源選型
光的反射定律:反射光線與入射光線、法線在同一平面上,反射光線和入射光線分居在法線的兩側;反射角等于入射角。背光源的原理:利用光源發光,并通過液晶屏幕的控制,使得圖像能夠顯示出來。同軸光原理:指在光學系統中,采用同一光軸傳輸的光線,以實現光學成像或光學效果的原理。在同軸光系統中,光線沿著同一軸線傳輸,減少了光線的散射和干擾,有利于提高成像質量和系統穩定性。非同軸漫射光原理:指在光學系統中,光線不沿著同一軸線傳輸,而是以散射的方式傳播的原理。這種光線傳輸方式通常用于照明系統或投影系統中,其特點是能夠實現均勻、柔和的光線分布。偏振光:是在振動方向上具有一定規律的光,其原理涉及到光波的振動方向和傳播方向。光是一種電磁波,它的電場和磁場垂直于光的傳播方向,并以橫波的形式傳播。當光波的電場振動方向被限制在特定方向上時,就產生了偏振光。紅外光原理:紅外光是一種波長介于可見光和微波之間的電磁輻射,波長范圍通常為0.75微米到1000微米。紅外光在光譜中處于可見光的下方,因此人眼無法直接看到紅外光。紅外光原理是基于物體的紅外輻射特性和紅外光與物質相互作用。紫外光原理:紫外光是指波長較短的紫外線輻射,波長范圍大致在10納米到400納米之間。紫外光在光譜中處于可見光的上方,人眼無法直接看到紫外光。紫外光原理是基于物質對紫外輻射的吸收特性和紫外光與物質相互作用的原理,通過紫外光源和光學系統實現了對紫外光的產生、利用和應用。彩色原理:指人類視覺系統是如何感知和識別不同顏色的。彩色的感知是通過人眼中的視錐細胞來實現的,這些細胞對不同波長的光有不同的反應,從而使我們能夠看到豐富多彩的世界。色環原理:指色彩空間中的一種表示方法,通常用于描述和組織顏色之間的關系。在色環中,顏色被排列在一個圓環或者圓柱狀的空間中,以便更直觀地展示不同顏色之間的相對位置和關聯。通過色相、飽和度和亮度這三個屬性,色環可以很好地描述和組織各種顏色之間的關系。
工業光源選型案例
)
![[pdf]《軟件方法》2024版部分公開-共196頁](http://pic.xiahunao.cn/[pdf]《軟件方法》2024版部分公開-共196頁)

)

)




)

、IsValidLowLevel()、IsValidLowLevelFast()的區別)
自動求導與概率)




)
