本教程展示如何在 Omniverse Isaac Sim 中導入 urdf
一. 使用內置插件導入urdf
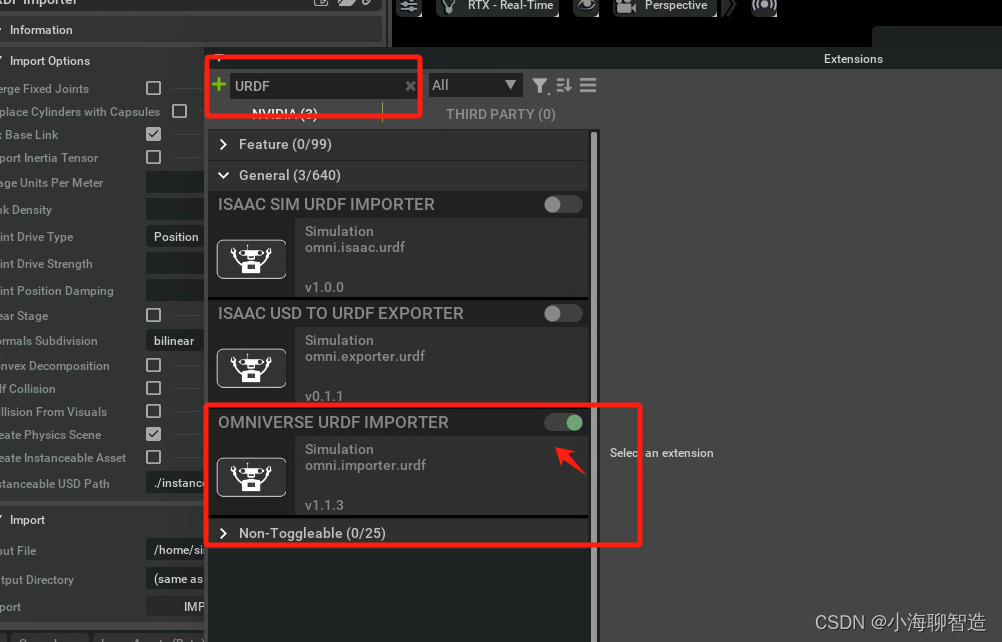
- 安裝urdf 插件
方法是轉到“window”->“Extensions”
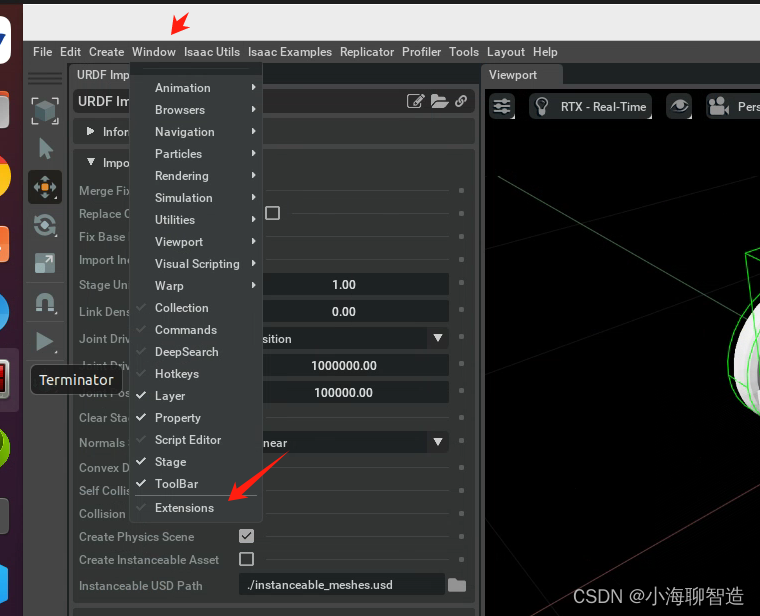
搜索框中輸入urdf, 并啟用
- 通過轉至Isaac Utils -> Workflows -> URDF Importer菜單來訪問 urdf 擴展。
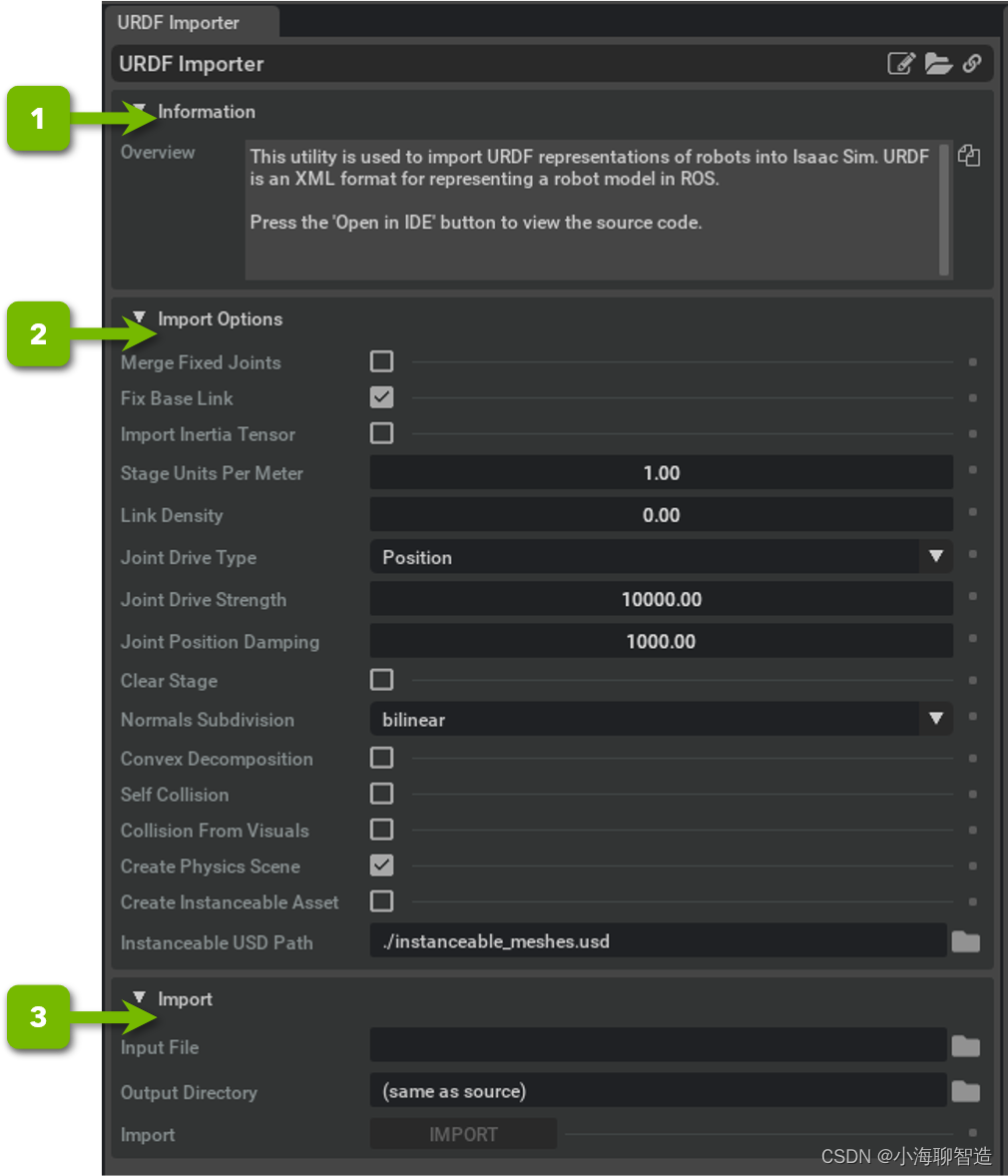
表格中的 1,2,3 對應著上圖中的1,2,3 位置說明

導入選項
-
Merge Fixed Joins-合并固定關節:合并由固定關節連接的鏈接,以便關節僅應用于移動的關節。合并的框架仍將顯示為它們合并到的父框架的子框架。
-
Replace Cylinders with Capsules-固定底座鏈接:選中后,機器人的底座將固定在世界坐標中的位置。
-
Fix base link-導入慣量張量:直接從 urdf 檢查負載慣量。如果 urdf 未指定慣性張量,則將使用恒等式并按比例因子進行縮放。如果未選中,Physx 將自動計算。非對角慣性矩陣分量將用于計算主軸表示以及對角線。
-
Stage Units Per Meter- 每米舞臺單位:Omniverse Kit 默認長度單位是厘米。您可以在此處設置比例因子以匹配 URDF 中使用的單位。目前,URDF 導入器僅支持統一的全局縮放。scale在未來的版本中將可以對不同的軸和特定的網格部分應用不同的縮放(即使用URDF 網格標簽下的參數)。如果您scale的 URDF 中有一個參數,您可能需要手動調整 URDF 中的其他值,以便所有參數都采用相同的單位。
-
Link Density 鏈接密度:如果鏈接沒有給定質量,則使用此密度(以 Kg/m^3 為單位)根據鏈接體積計算質量。值 0.0 也可用于告訴物理引擎自動計算密度。
-
Joint Drive Type-關節驅動類型:默認關節驅動類型,值可以是None、Position和Velocity。
-
Joint Drivre Strenght-關節驅動強度:驅動強度是位置驅動的關節剛度,或速度驅動關節的阻尼。
-
Joint Position Damping-關節位置驅動阻尼:如果驅動類型設置為位置,則這是使用的默認阻尼值。
-
Clear Stage-清除舞臺:選中后,在加載新的 URDF 之前清理舞臺,否則將其加載到位置(0,0,0)的當前打開舞臺上
-
Normals Subdivision-法線細分:網格法線細分方案。如果導入的網格包含創作的法線,請選擇“無”以避免覆蓋它們。
-
Convex Decomposition -凸面分解:如果選中,碰撞對象將成為一組凸面網格,以更好地匹配視覺資源。否則將使用凸包。
-
Self Collision -自碰撞:啟用相鄰鏈接之間的自碰撞。如果碰撞網格在接頭處相交,可能會導致不穩定。
-
Collision From Visuals-來自視覺的碰撞:如果碰撞沒有被創作為自己的網格,請選中此選項以使用視覺網格來定義碰撞器。
-
Create Physics Scene-創建物理場景:在舞臺上創建默認物理場景。由于該物理場景是在機器人資產外部創建的,因此不會將其加載到由機器人資產組成的其他場景中。
-
Create Instanceable Asset -創建可實例化資源:選擇此選項可創建具有可實例化網格的資源。這對于包含同一機器人的多個實例的場景非常有用(例如強化學習任務)。
-
Instanceable USD Path-輸出目錄:導入資產的目的地。它將創建一個文件夾結構,其中包含機器人資源和用于渲染的所有紋理。您必須具有對此目錄的寫入權限
讓我們指定要導入 Franka 的設置:
選中“修復基本鏈接”和“僅創建物理場景”旁邊的框。
將舞臺單位每米設置為1.0,這意味著資源將以米為單位導入
將關節??驅動類型設置為“位置”
將關節??驅動強度和關節位置驅動阻尼設置為10000000.0和100000.0
將輸出目錄設置為存儲資產的位置(核心或本地)
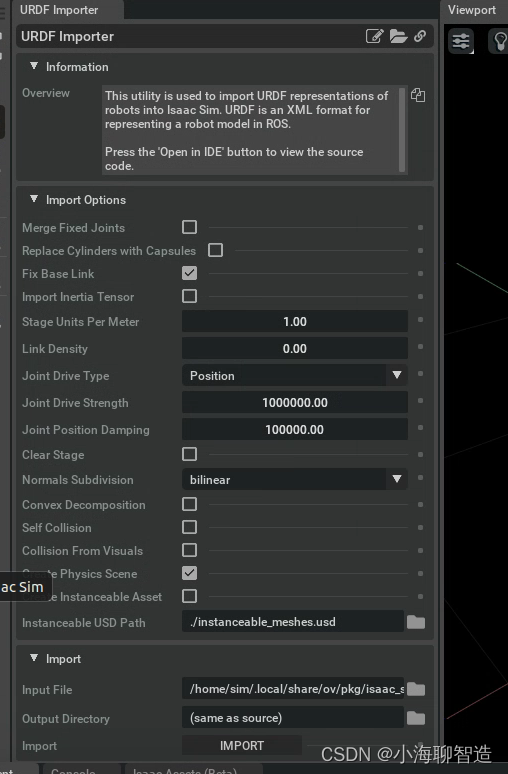
您必須對用于導入的輸出目錄具有寫入權限,它將默認為當前打開的階段,請根據需要更改此設置
導入urdf 文件
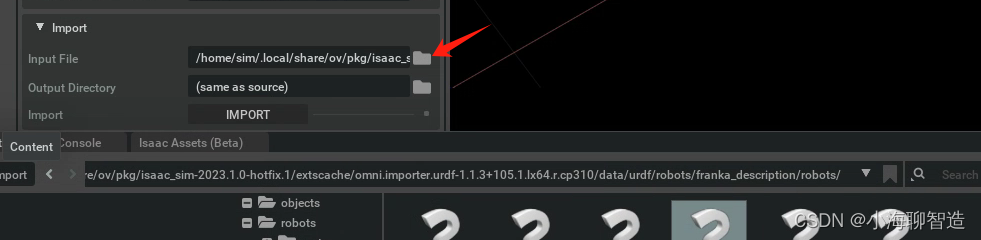
在導入選項卡下的文件輸入文件框中,導航到所需的文件夾,然后選擇所需的 URDF 文件。在此示例中,我們將使用 Franka panda_arm_hand.urdf文件,該文件包含在該擴展附帶的內置 URDF Files/robots/franka_description/robots文件夾中。
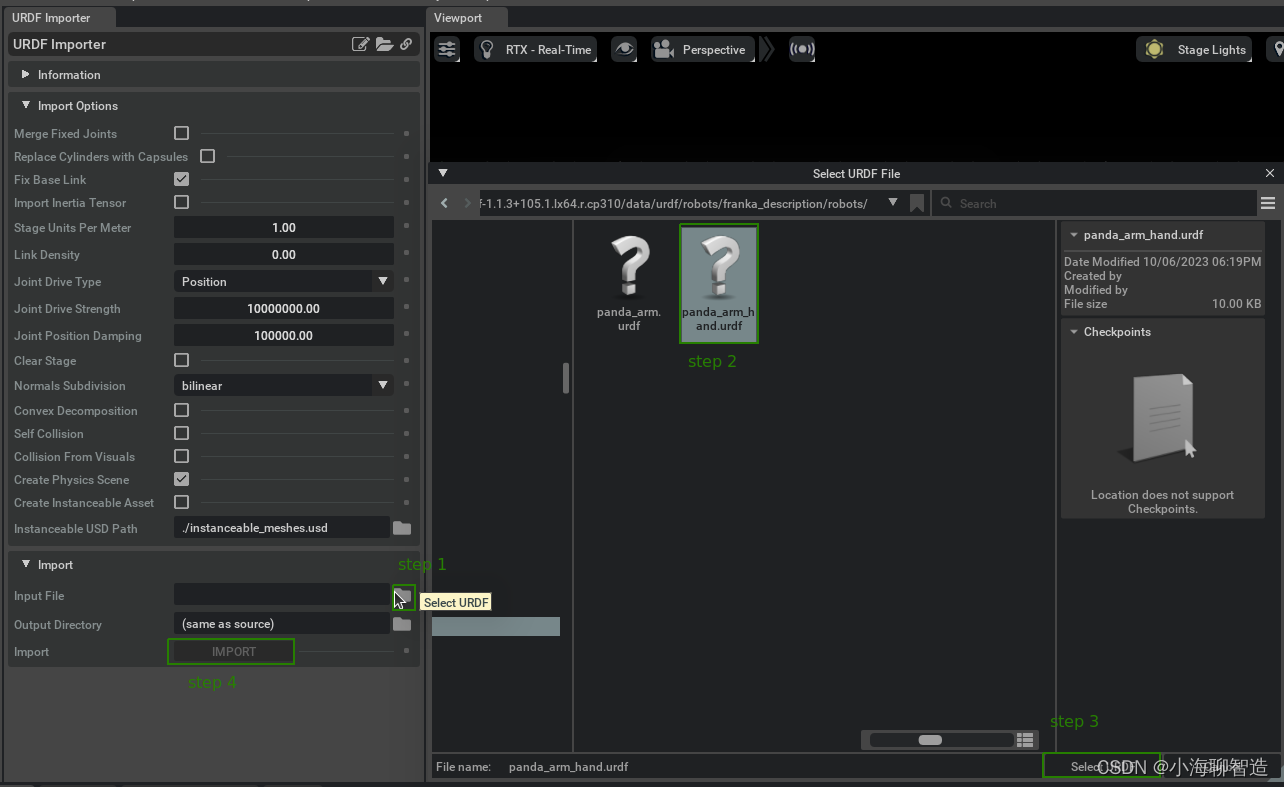
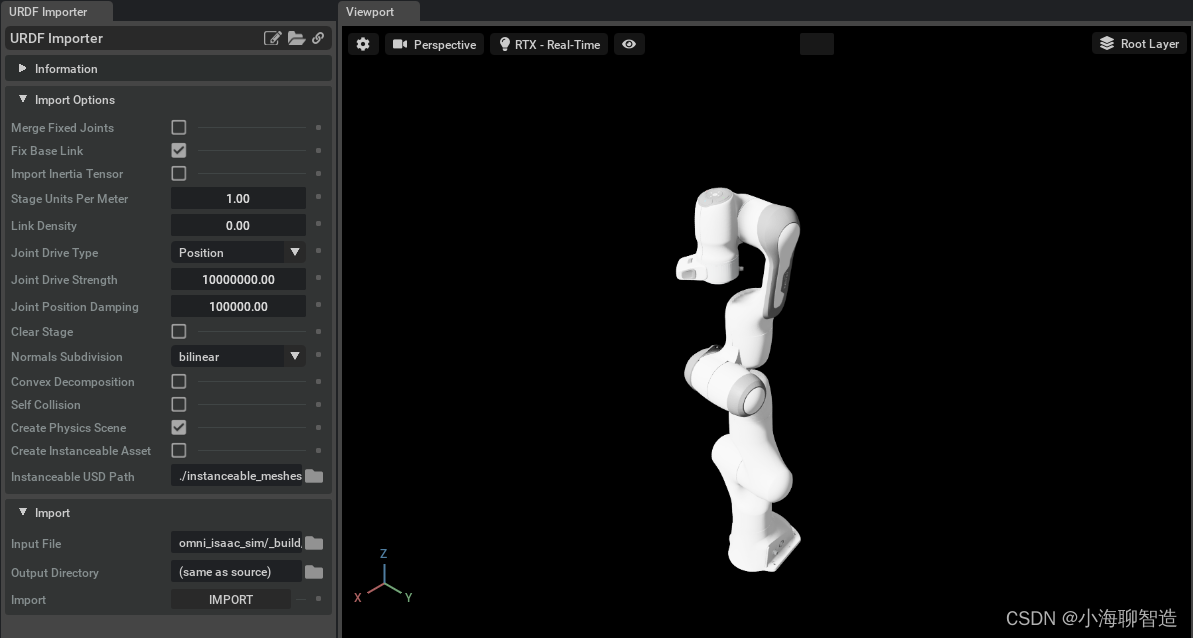
單擊“IMPORT ”按鈕 將機器人添加到舞臺。
可視化碰撞網格
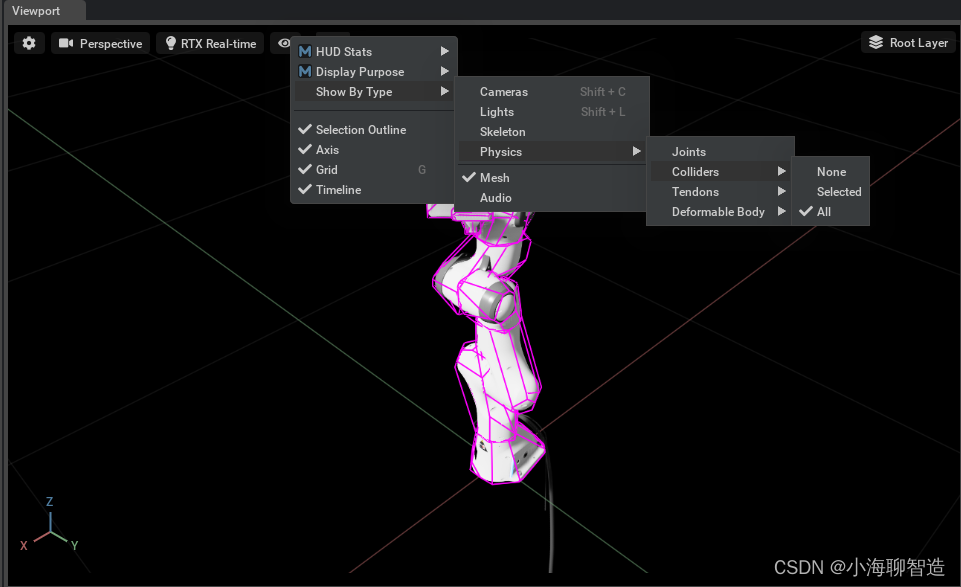
可視化碰撞網格,并非所有剛體都需要具有碰撞屬性,并且碰撞網格與視覺網格相比通常是簡化的網格。因此,您可能需要可視化碰撞網格以進行檢查。要在任何視口中可視化碰撞:
選擇:視口左上角的眼睛圖標。

選擇:Show By Type。
選擇:Physics。
選擇:Colliders。
選擇 All 。
如果您要導入移動機器人,您可能需要更改以下設置
取消選中修復基本鏈接
將關節??驅動類型設置為速度驅動
將關節??驅動強度設置為所需的水平。請注意,這將作為關節的阻尼參數導入。在速度驅動模式下,關節剛度始終設置為 0。
















-模塊化)


