1.ROS機器人實例介紹(PR2,Turtlebot,HRMRP,Kungfu Arm)
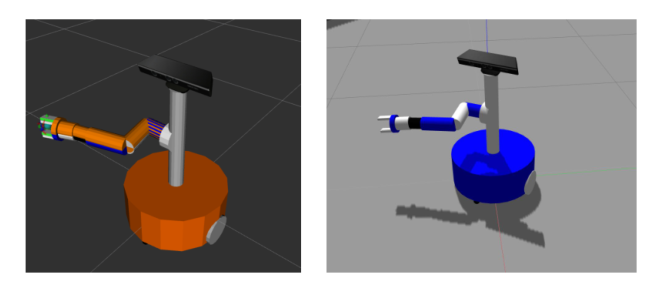
- 1).PR2:造就了ROS的機器人平臺,完全基于ROS開發,功能豐富、強大
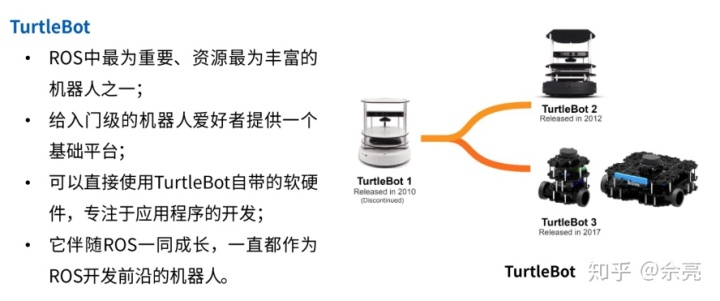
- 2).Turtlebot:ROS社區中最流行的高性價比機器人平臺,前后工發布三代
- 3).Universal Robot:工業領域的協作機器人定義者
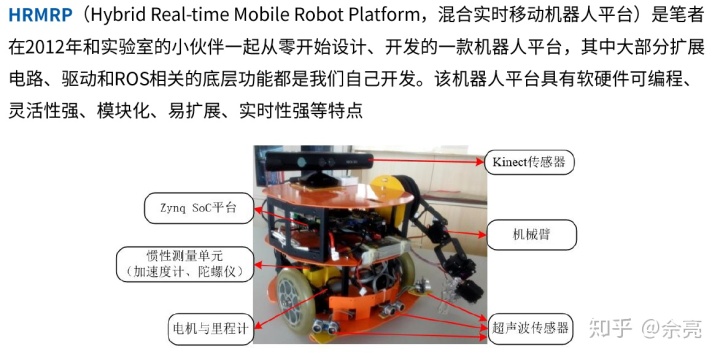
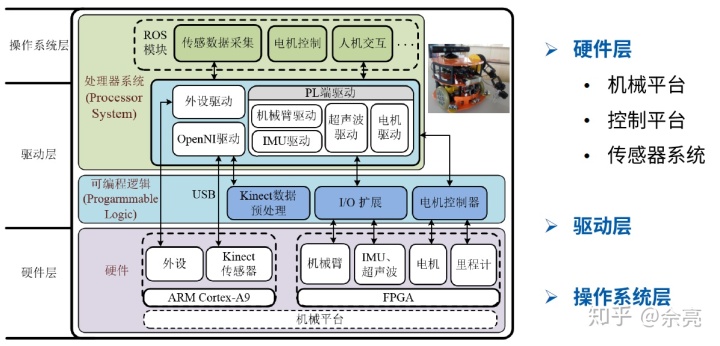
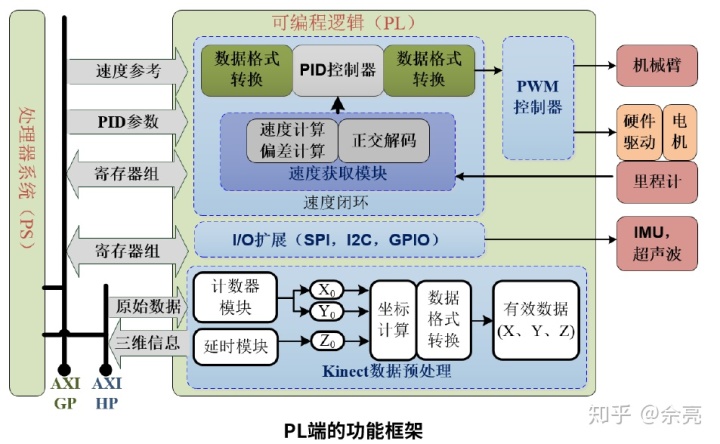
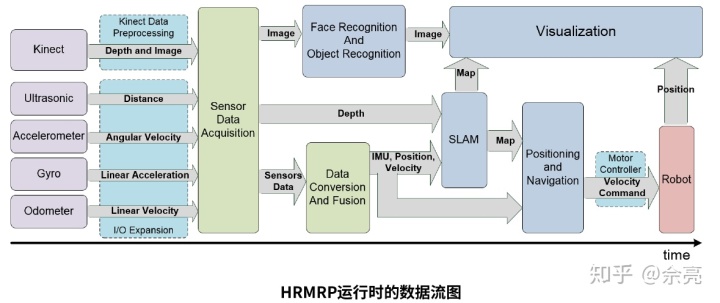
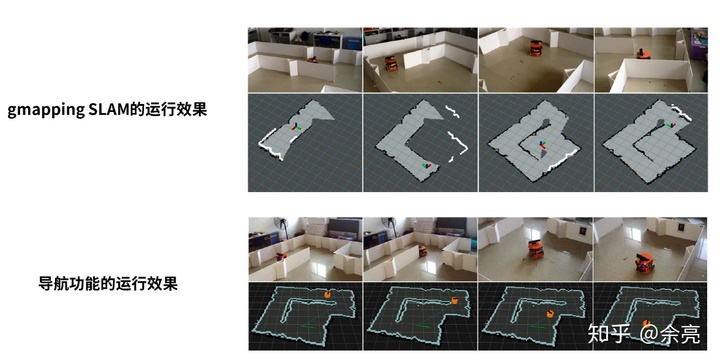
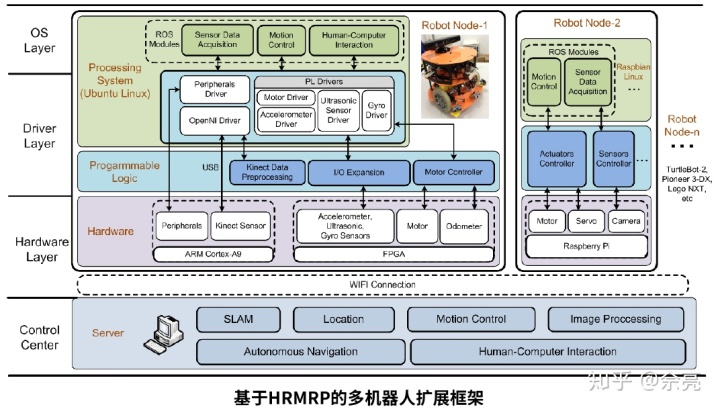
- 4).HRMRP:基于ARM+FPGA的異構實時移動機器人平臺,可實現SLAM、導航、圖像處理、多機器人協作等功能
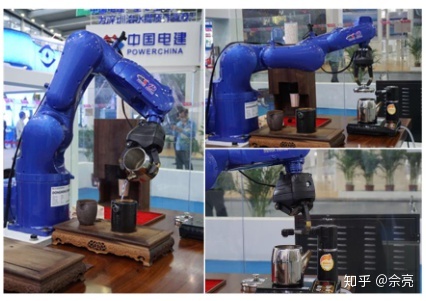
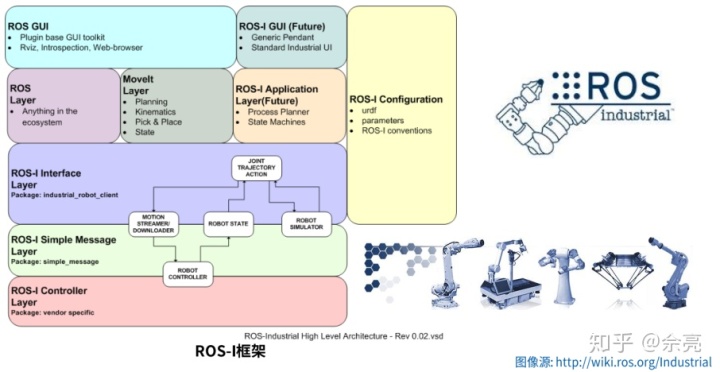
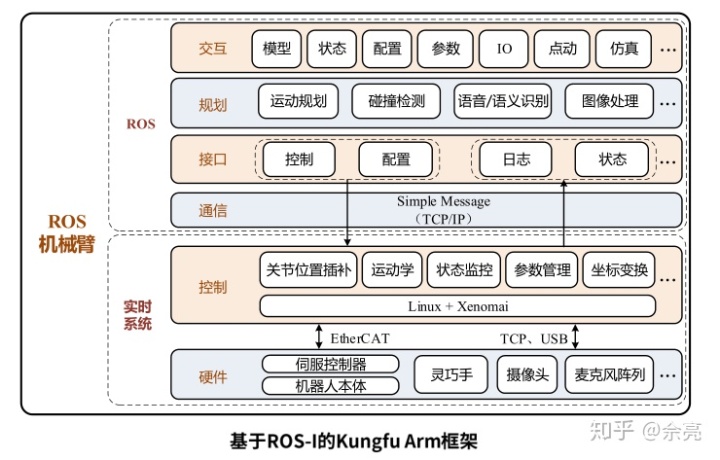
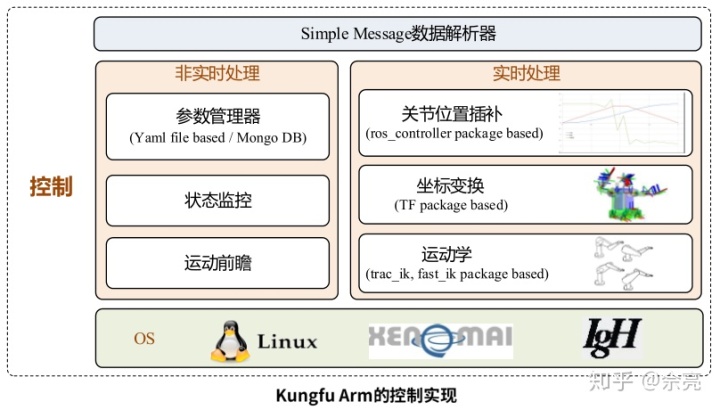
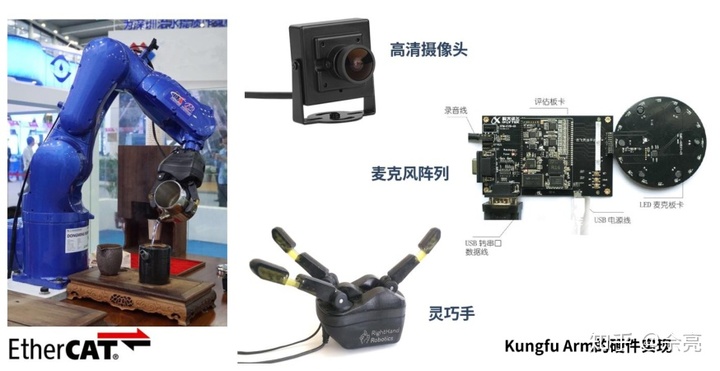
- 5).Kungfu Arm:基于ROS-I框架的機械臂控制系統,集成了機器視覺、語音、靈巧手等豐富的傳感器和執行器

安裝PR2功能包
sudo apt‐get install ros‐kinetic‐pr2‐*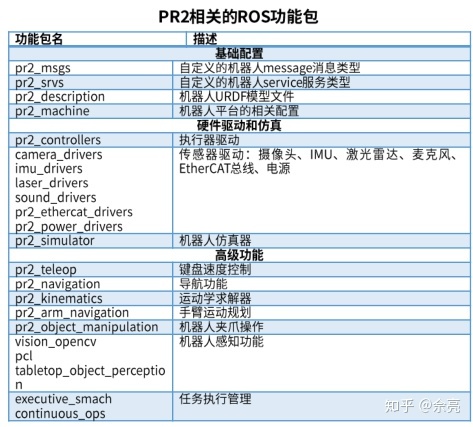
啟動Gazeboz仿真
roslaunch pr2_gazebo pr2_empty_world.launch 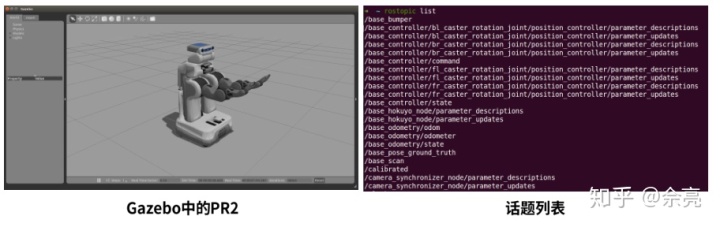
鍵盤控制
roslaunch pr2_teleop teleop_keyboard.launch 
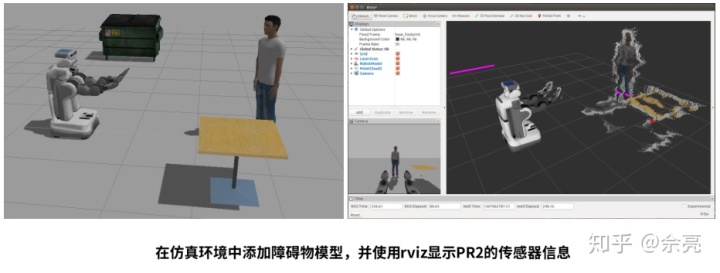
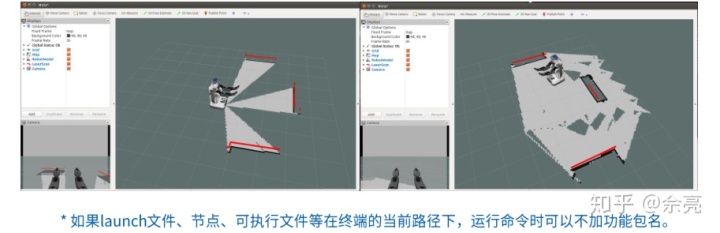
啟動SLAM
roslaunch pr2_build_map.launch
roslaunch pr2_teleop teleop_keyboard.launch 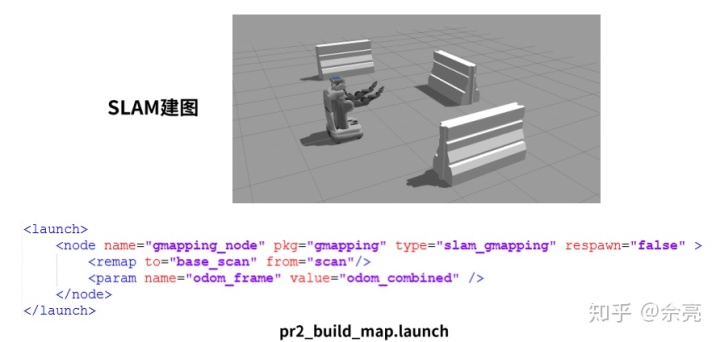
機械臂控制
roslaunch pr2_gazebo pr2_empty_world.launch
roslaunch pr2_teleop_general pr2_teleop_general_keyboard.launch 
機械臂MoveIt!控制
git clone https://github.com/davetcoleman/pr2_moveit_config.git
catkin_make
roslaunch pr2_moveit_config demo.launch 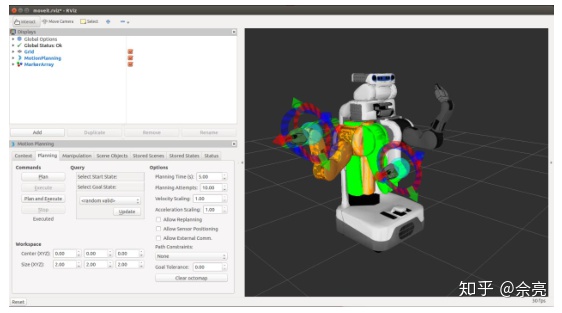
Gazebo+MoveIt!控制
roslaunch pr2_gazebo pr2_empty_world.launch
roslaunch pr2_moveit_config move_group.launch
roslaunch pr2_moveit_config move_rviz.launch 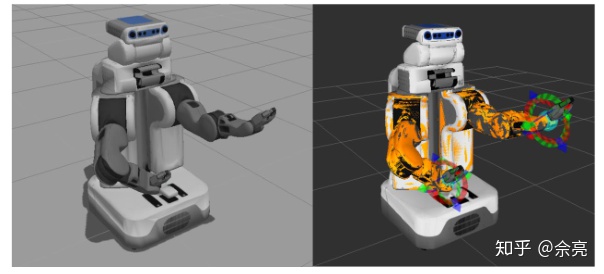
Turtlebot
安裝Turtlebot功能包
sudo apt-get install ros-kinetic-turtlebot-*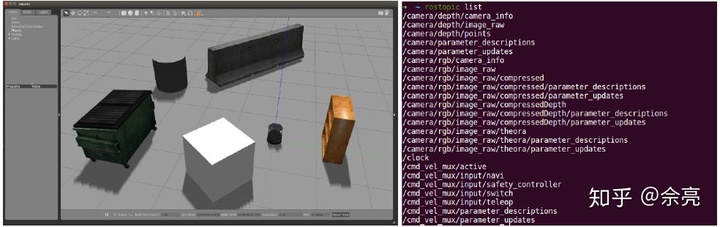
啟動仿真環境
export TURTLEBOT_GAZEBO_WORLD_FILE="/opt/ros/kinetic/share/turtlebot_gazebo/worlds/playgroud.world"
roslaunch turtlebot_gazebo turtlebot_world.launch 鍵盤控制
roslaunch turtlebot_teleop keyboard_teleop.launch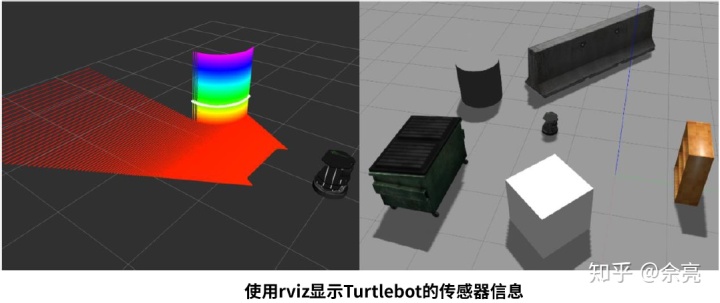
SLAM建圖
export TURTLEBOT_GAZEBO_WORLD_FILE="/opt/ros/kinetic/share/turtlebot_gazebo/worlds/playgroud.world"
roslaunch turtlebot_gazebo turtlebot_world.launch
roslaunch turtlebot_gazebo gmapping_demo.launch
roslaunch turtlebot_rviz_launchers view_navigation.launch
roslaunch turtlebot_teleop keyboard_teleop.launch 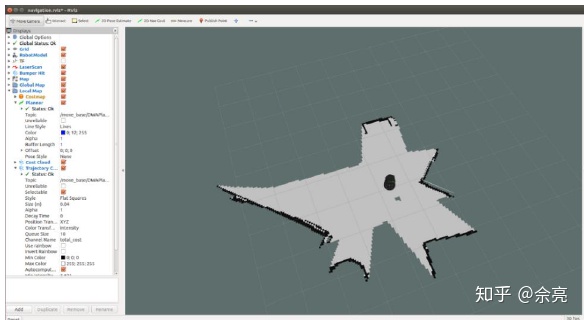
自主導航
roslaunch turtlebot_gazebo amcl_demo.launch
map_file:=/home/sl/turtlebot_test_map.yaml
roslaunch turtlebot_rviz_launchers view_navigation.launch 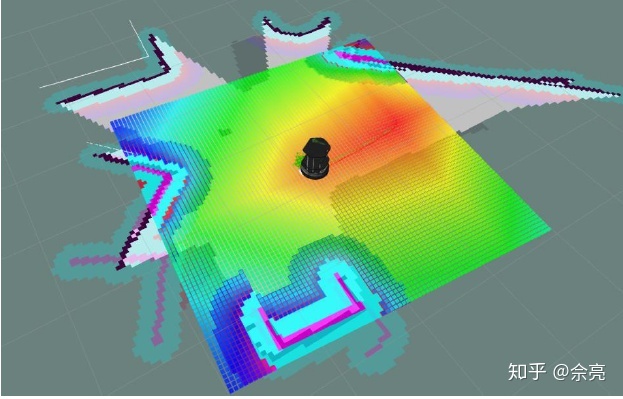
安裝Turtlebot3功能包
sudo apt-get install ros-kinetic-turtlebot3-* 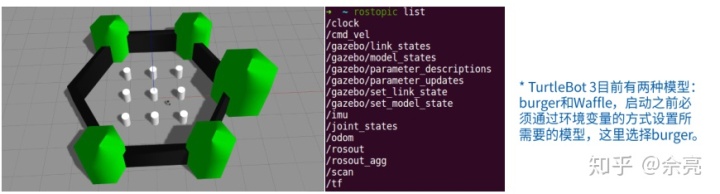
啟動仿真環境
export TURTLRBOT3_MODEL=burger
roslaunch turtlebot3_gazebo_ros turtlebot3_world.launch SLAM建圖
roslaunch turtlebot3_slam turtlebot3_slam.launch
rosrun turtlebot3_teleop turtlebot3_teleop_key 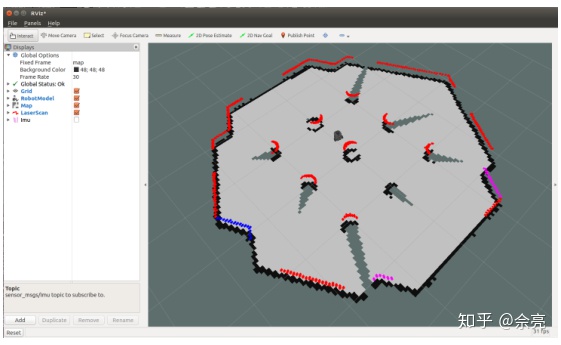
Universal Robot 優傲機器人
- 一家引領協作機器人全新細分市場的先驅企業
- 關注機器人的用戶可操作性和靈活度
- 安全度高、無需安全圍欄、編程簡單、靈活度高
- UR5,自重18公斤,負載高達5公斤、工作半徑85cm
- UR3,自重11公斤,有效負載3公斤,所有腕關節均可360度旋轉,末端關節可作無線旋轉
- UR10的有效負載為10公斤,工作半徑130cm
安裝UR功能包
sudo apt-get install ros-kinetic-universal-robot 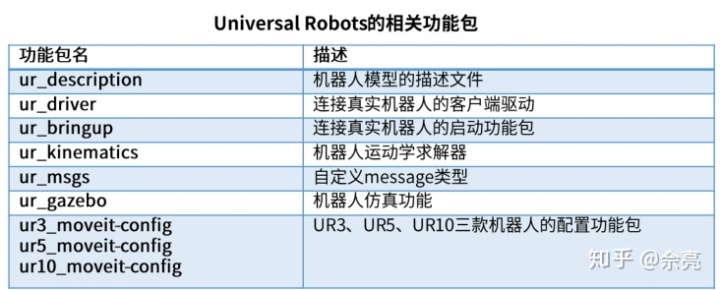
啟動仿真環境
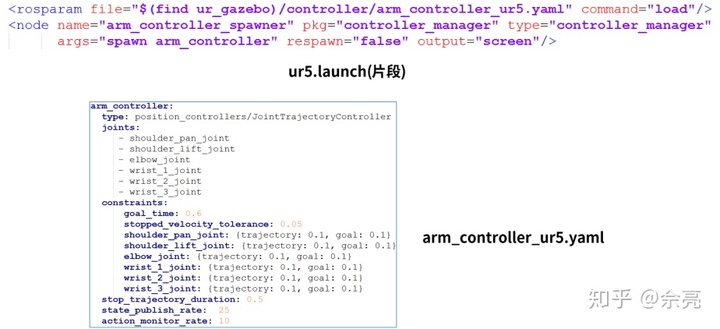
roslaunch ur_gazebo ur5.launch 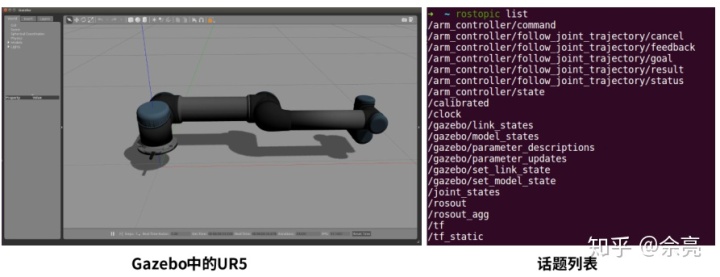
MoveIt!+gazebo
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
roslaunch ur5_moveit_config moveit_rviz.launch config:=true 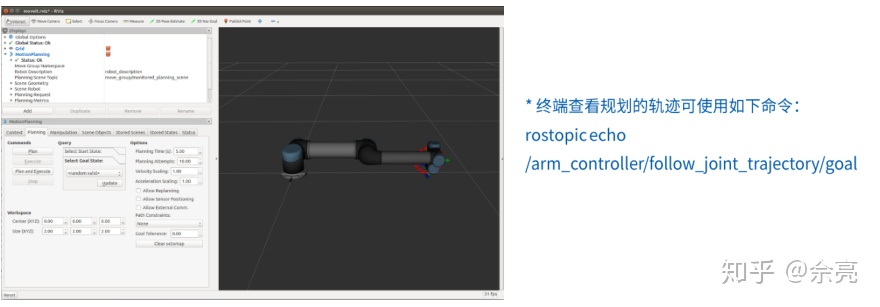
HRMRP
Kungfu Arm
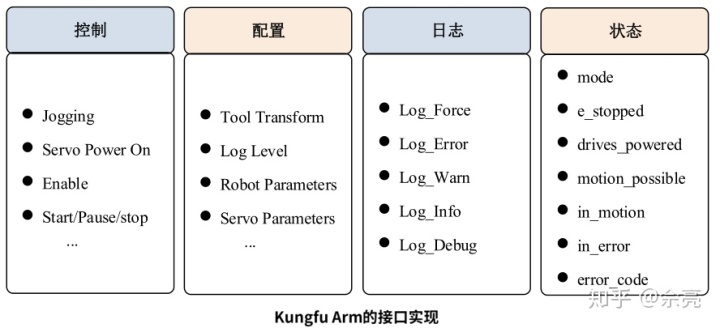
- 基于ROS/ROS-I實現
- 同時控制六軸機械臂和仿生手,實現靈巧的夾持姿勢
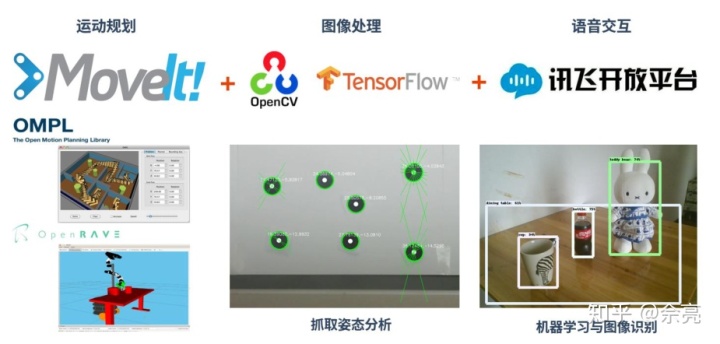
- 集成了多種運動規劃庫,可以實現運動學求解、路徑規劃、自主避障、速度和加速度的高階平滑
- 集成高速視覺識算法,可以識別、定位工作范圍內的杯子、茶球等物體,輔助機器人抓取
- 集成中文語音識別功能,可以實現語音控制、編程,豐富了機器人的輸入途徑
- 功能豐富的人機交互界面,不僅提供常用的機器人控制和監控,同時具備可熱切換的3D離線仿真功能
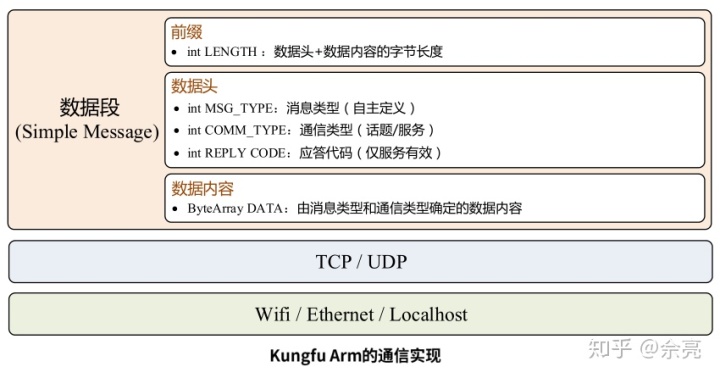
- 底層伺服通訊采用高速EtherCAT工業總線,可以適配多種機器人本體

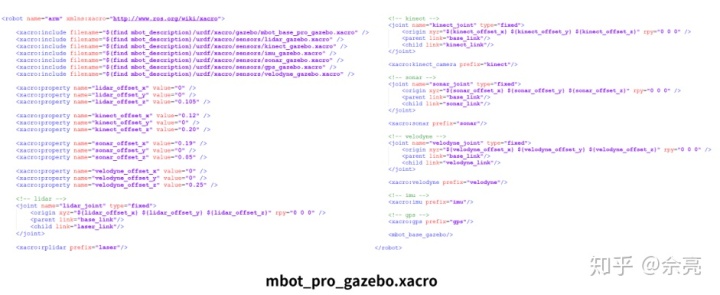
2.構建綜合機器人平臺
編譯源碼
sudo apt-get install ros-kinetic-velodyne-simulator
sudo apt-get install ros-kinetic-hector-gazebo-plugins
sudo apt-get install ros-kinetic-pcl-conversions ros-kinetic-pointcloud-to-laserscan
catkin_make mbot pro
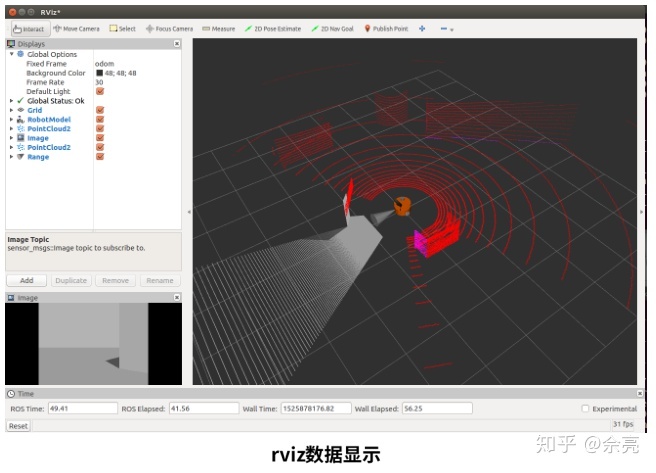
模型顯示
roslaunch mbot_description display_mbot_pro_xacro.laserscan 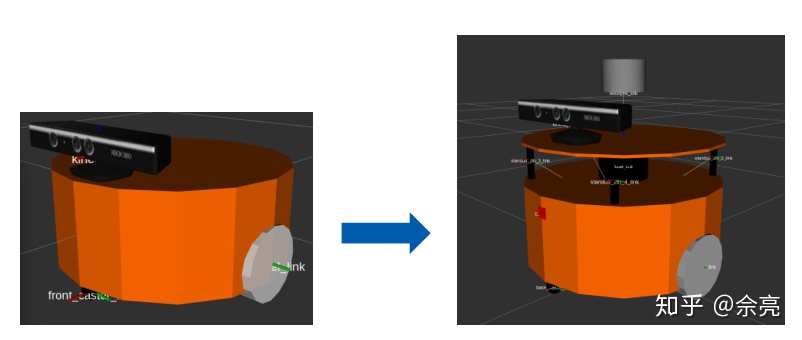
仿真環境
roslaunch mbot_gazebo view_mbot_pro_with_laser_kinetic_gazebo.launch 
物體跟蹤
roslaunch mbot_gazebo view_mbot_pro_with_laser_kinetic_gazebo.launch
roslaunch mbot_follower follower_bringup_nodelet.launch 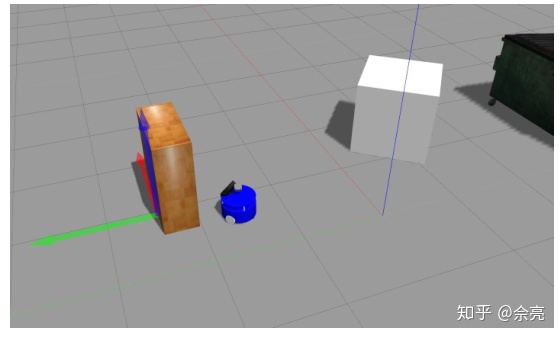
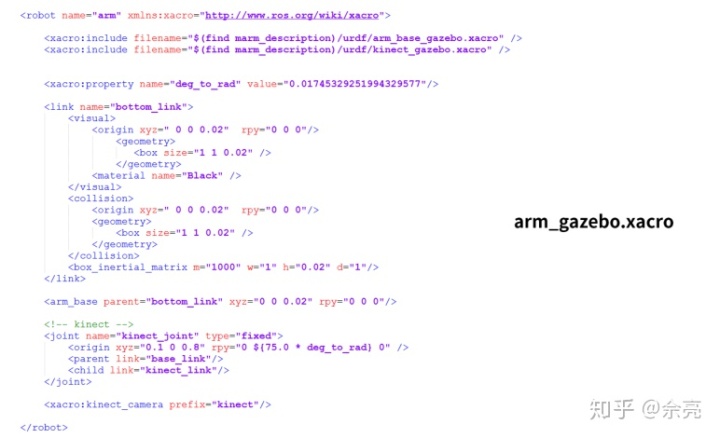
marm pro
模型顯示
roslaunch marm_desription view_arm.launch 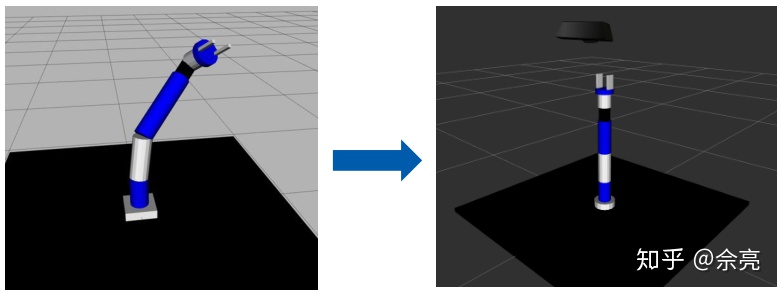
仿真環境
roslaunch marm_gazebo arm_world.launch 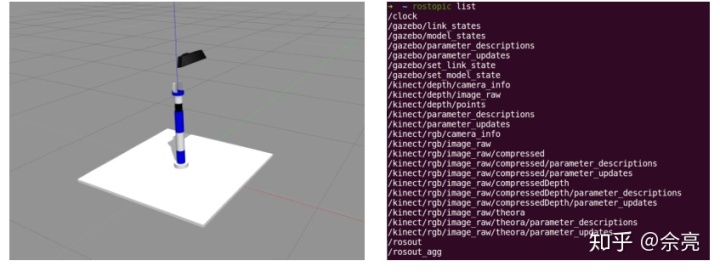
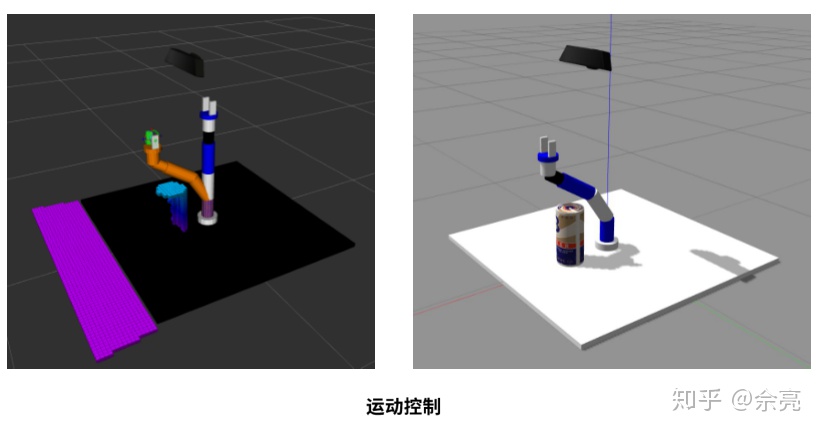
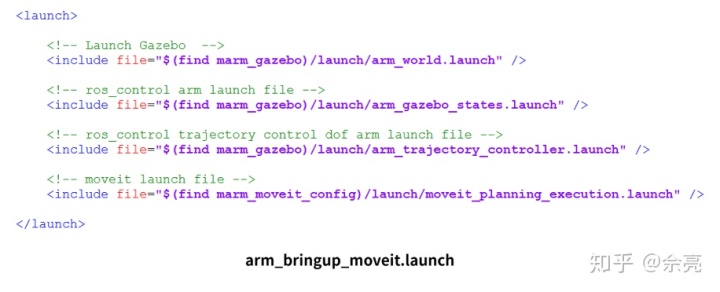
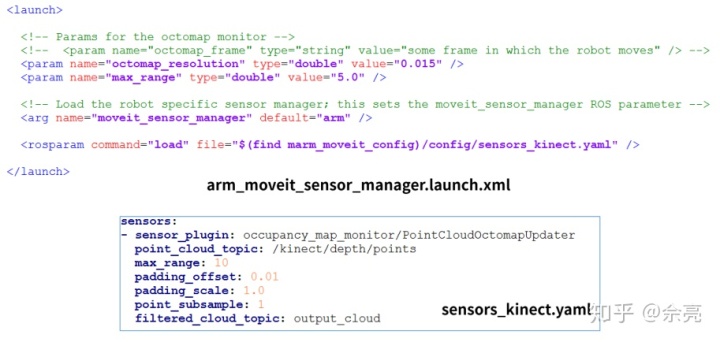
MoveIt!視覺集成
roslaunch marm_gazebo arm_bringup_moveit.launch 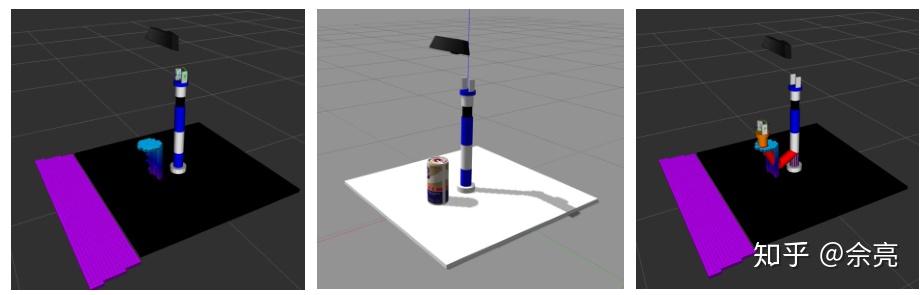
mbot+marm
模型顯示
roslaunch marm_desription view_mbot_with_arm.launch
roslaunch marm_desription view_mbot_with_arm_kinect.launch 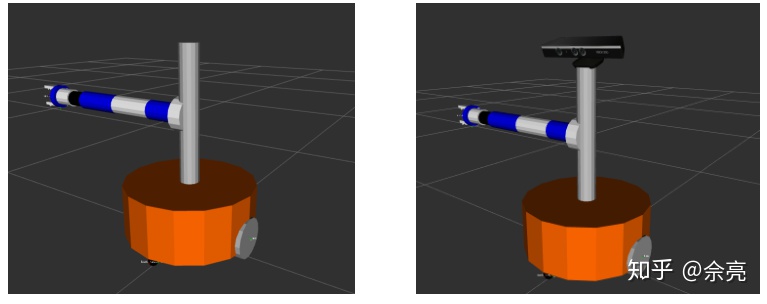
MoveIt!控制
roslaunch mbot_with_arm_moveit_config demo.launch 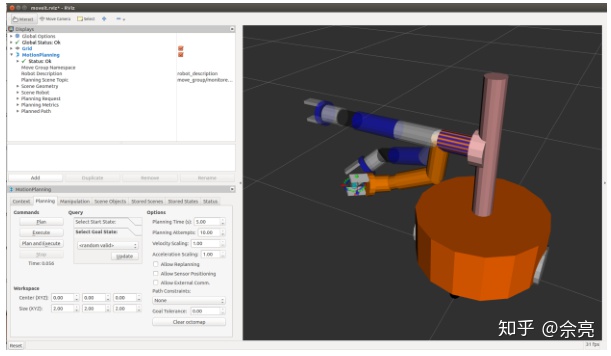
gazebo仿真環境
roslaunch marm_gazebo mbot_with_arm_world.launch 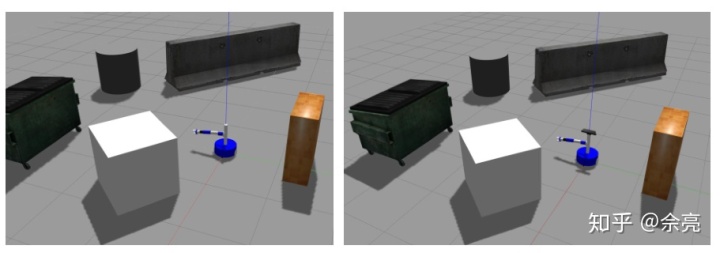
MoveIt!+gazebo控制
roslaunch marm_gazebo mbot_with_arm_bringup_moveit.launch 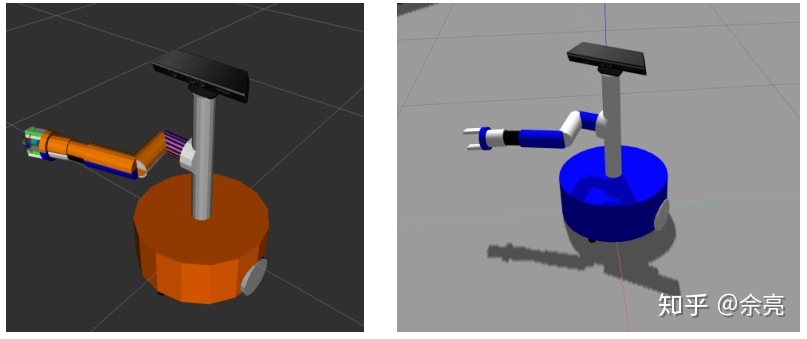




)







慢得多.為什么?)






