文章目錄
- 1 想法概述
- 2 實際過程
- 階段1 Add Noise
- 階段2 Denoise
- 3 數學原理
- 4 為什么推理時要額外加入noise
- 5 一些不知道對不對的Summary
1 想法概述
從一張充滿噪聲的圖中不斷denoise,最終得到一張clear的圖片。為了確定當前圖片中噪聲占比的大小,同時輸入原圖片和參數 t t t,參數 t t t用于標識一張圖片中的噪聲占比含量。
顯然迭代第1次時圖片的噪聲含量和迭代第999次是不同的,因此需要輸入這種信息t來進行標識。
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-7CjpzYoX-1692290104065)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230814190229199.png)]](https://img-blog.csdnimg.cn/4f4e17d3e69340118b4f01c429735850.png)
2 實際過程
階段1 Add Noise
首先,準備好一組確定的參數 α 1 ˉ , α 2 ˉ , … , α T ˉ \bar{\alpha_1},\bar{\alpha_2},\dots,\bar{\alpha_T} α1?ˉ?,α2?ˉ?,…,αT?ˉ?,用以表示時間步 t t t下樣本和噪聲的混合情況, t t t越大,噪聲占比越高。然后重復以下過程直至收斂:
-
采樣
-
從真實樣本集中取出一個樣本 x 0 x_0 x0?
-
從 [ 1 , T ] [1,T] [1,T]的整數中采樣出 t t t來表示時間步
-
從標準正態分布中采樣出噪聲 ? \epsilon ?
-
-
構造帶噪聲樣本 x = α t ˉ x 0 + 1 ? α t ˉ ? x=\sqrt{\bar{\alpha_t}}x_0+ \sqrt{1-\bar{\alpha_t}} \epsilon x=αt?ˉ??x0?+1?αt?ˉ???
-
將構造樣本 x x x和時間步 t t t一同輸入噪聲預測器 ? θ ( ) \epsilon_\theta() ?θ?(),得到預測噪聲 ? θ ( x , t ) \epsilon_\theta(x,t) ?θ?(x,t)。
-
目標函數為 ? θ ( x , t ) \epsilon_\theta(x,t) ?θ?(x,t)和采樣出的真實噪聲 ? \epsilon ?的 M S E MSE MSE
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-D7mqKw6q-1692290104066)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230814194524251.png)]](https://img-blog.csdnimg.cn/c04335120773405a8bdf66cd3009269b.png)
階段2 Denoise
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-21zUXHgj-1692290104066)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230814201251917.png)]](https://img-blog.csdnimg.cn/31eb1bfa22734d9ba5246a0c317d3e00.png)
3 數學原理
- 極大似然估計近似等價于最小化KL散度(表示兩個分布的相似性):
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-S3lKC0VE-1692290104066)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230817221857642.png)]](https://img-blog.csdnimg.cn/f71fb4de1faa4b4080fbadc62dba0b0a.png)
- 對任何分布 q ( z ∣ x ) q(z|x) q(z∣x),有:
log ? P θ ( x ) ≥ ∫ z q ( z ∣ x ) log ? P ( z , x ) q ( z ∣ x ) d z = E q ( z ∣ x ) [ log ? P ( z , x ) q ( z ∣ x ) ] \log P_\theta(x) \ge \int_{z}q(z|x)\log \frac{P(z,x)}{q(z|x)}dz = E_{q(z|x)}[\log \frac{P(z,x)}{q(z|x)}] logPθ?(x)≥∫z?q(z∣x)logq(z∣x)P(z,x)?dz=Eq(z∣x)?[logq(z∣x)P(z,x)?]
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-EMBIDtfT-1692290104067)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230817222057765.png)]](https://img-blog.csdnimg.cn/2383ae51d3b14fff84fbed64cb5fdd62.png)
- 所以對DDPM來說:
log ? P θ ( x ) ≥ E q ( x 1 : x T ∣ x 0 ) [ log ? P ( x 0 : x T ) q ( x 1 : x T ∣ x 0 ) ] \log P_\theta(x) \ge E_{q(x_1:x_T|x_0)}[\log \frac{P(x_0:x_T)}{q(x_1:x_T|x_0)}] logPθ?(x)≥Eq(x1?:xT?∣x0?)?[logq(x1?:xT?∣x0?)P(x0?:xT?)?]
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-FqgMWPQQ-1692290104067)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230817222642961.png)]](https://img-blog.csdnimg.cn/d91ef7dc43b54294850f028358d3f1a3.png)
- 結合正態分布的可加性:做N次獨立的正態sampling,可能通過一次的sampling就能解決。
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-oyzChf3t-1692290104067)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230817225900399.png)]](https://img-blog.csdnimg.cn/767e444ef5204f839cc0b930f56e1349.png)
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-w4gtTsG6-1692290104067)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230817231727538.png)]](https://img-blog.csdnimg.cn/bf47251d15fa41589595d129dc70d2a8.png)
- 對式3不斷變換,最后可得(這個式子的過程可以不用看,也并不復雜,但是麻煩,理解結論就好):
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-SY9fKeIh-1692290104068)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230817232929967.png)]](https://img-blog.csdnimg.cn/f4cea90358114568a48d9426017d81b9.png)
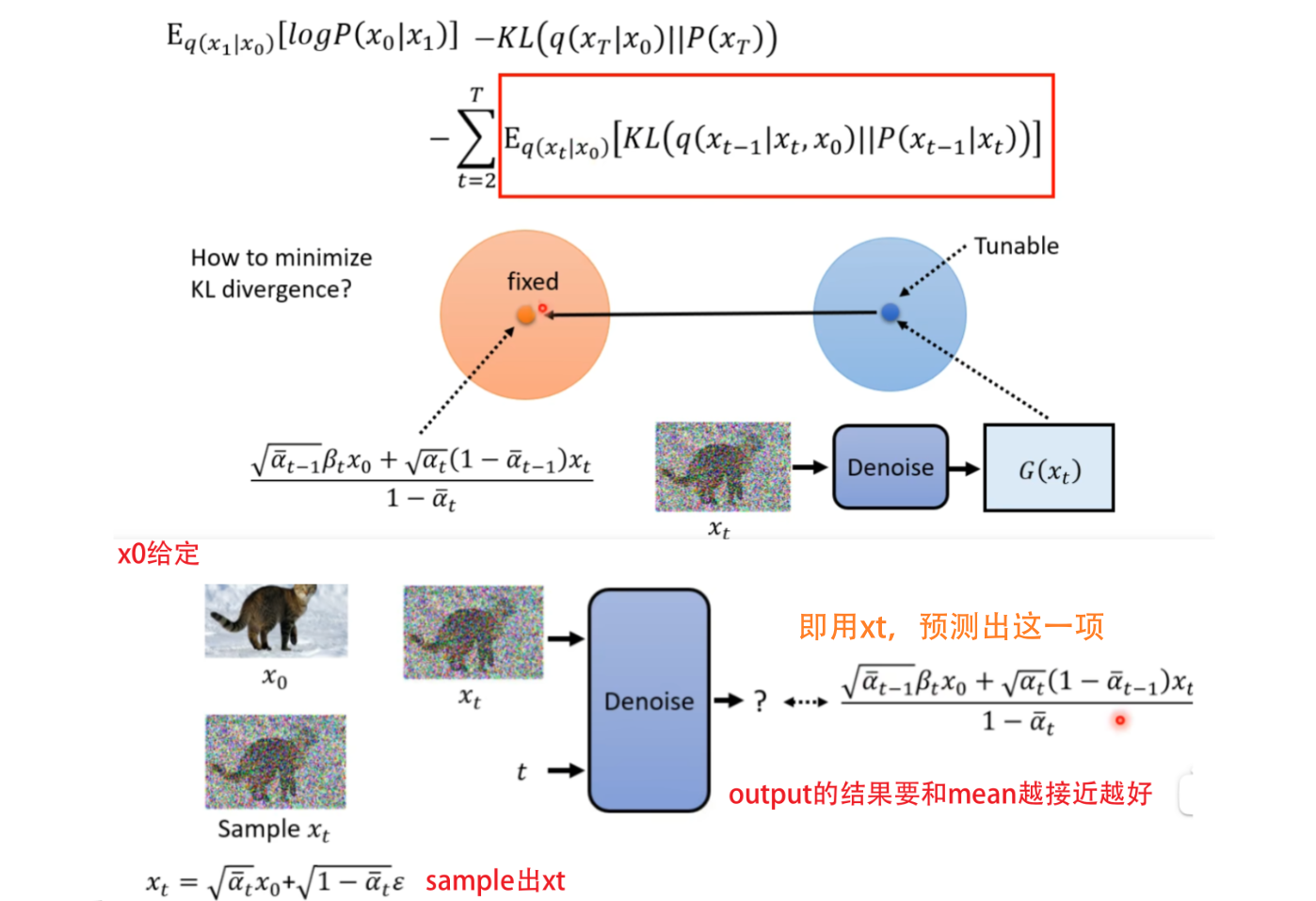
然后再經過一系列的運算求出來 q ( x t ? 1 ∣ x t , x 0 ) q(x_{t-1|x_t,x_0}) q(xt?1∣xt?,x0??)依然是高斯分布,表示首尾 x 0 , x T x_0,x_T x0?,xT?固定住,產生 x t ? 1 x_{t-1} xt?1?的概率,是一個和network無關的分布。而 P ( x t ? 1 ∣ x t ) P(x_{t-1}|x_t) P(xt?1?∣xt?)是由網絡決定的,我們不考慮它的variance,只考慮mean。如果我們希望這兩個分布越接近越好,那就想辦法讓兩個分布的mean越接近越好。
化簡:
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-B0OFKfc5-1692290104068)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230817233152037.png)]](https://img-blog.csdnimg.cn/94875687bc15457f8d78d4a50400a5d5.png)
實際需要預測出的部分:
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-OpE6Y02O-1692290104069)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230817234731710.png)]](https://img-blog.csdnimg.cn/058ce2f63eaa42ef97aa502ab8d92950.png)
4 為什么推理時要額外加入noise
李宏毅老師的一點Guess,生成式任務,概率最大的結果,未必就是最好的結果。人寫的文章用詞可能更suprising。
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-BxAIdBaQ-1692290104069)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230817235534101.png)]](https://img-blog.csdnimg.cn/2b08a21cf6bb432e806ba75c8e148d30.png)
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-w8wYcaVO-1692290104069)(【Diffusion】李宏毅2023機器學習Diffusion筆記/image-20230817235706919.png)]](https://img-blog.csdnimg.cn/ced2475cfe794eeca024204e5f32ceaf.png)
![[外鏈圖片轉存失敗,源站可能有防盜鏈機制,建議將圖片保存下來直接上傳(img-vmK39t6D-1692290104069)(【Diffusion】李宏毅2023機器學習Diffusion筆記/ab7e3c6482dc90f4bfc5857991f4375.jpg)]](https://img-blog.csdnimg.cn/41fca1f566d14926833764da62bd92ec.png)
5 一些不知道對不對的Summary
-
希望近似 P d a t a ( x ) P_{data}(x) Pdata?(x)和 P θ ( x ) P_\theta(x) Pθ?(x)的分布,而對給定的 x x x,使 P θ ( x ) P_\theta(x) Pθ?(x)最大化可以轉換為使其下界最大化,從而轉換為使 E q ( x 1 : x T ∣ x 0 ) [ log ? P ( x 0 : x T ) q ( x 1 : x T ∣ x 0 ) ] E_{q(x_1:x_T|x_0)}[\log \frac{P(x_0:x_T)}{q(x_1:x_T|x_0)}] Eq(x1?:xT?∣x0?)?[logq(x1?:xT?∣x0?)P(x0?:xT?)?]最大化。
-
在假設 x t = β t x t ? 1 + 1 ? β t z t ? 1 x_t=\sqrt{\beta_t}x_{t-1}+\sqrt{1-\beta_t}z_{t-1} xt?=βt??xt?1?+1?βt??zt?1?的前提下,可以推出 x t = α t ˉ x 0 + 1 ? α t ˉ z x_t=\sqrt{\bar{\alpha_t}}x_{0}+\sqrt{1-\bar{\alpha_t}}z xt?=αt?ˉ??x0?+1?αt?ˉ??z
-
從而可以進一步化簡 E q ( x 1 : x T ∣ x 0 ) [ log ? P ( x 0 : x T ) q ( x 1 : x T ∣ x 0 ) ] E_{q(x_1:x_T|x_0)}[\log \frac{P(x_0:x_T)}{q(x_1:x_T|x_0)}] Eq(x1?:xT?∣x0?)?[logq(x1?:xT?∣x0?)P(x0?:xT?)?]為三項,其余兩項與Network無關,可只考慮中間一項,該項由 q ( x t ? 1 ∣ x t , x 0 ) q(x_{t-1|x_t,x_0}) q(xt?1∣xt?,x0??)和 P ( x t ? 1 ∣ x t ) P(x_{t-1}|x_t) P(xt?1?∣xt?)的KL散度之和組成,
-
q ( x t ? 1 ∣ x t , x 0 ) q(x_{t-1}|x_t,x_0) q(xt?1?∣xt?,x0?)表示首尾 x 0 , x T x_0,x_T x0?,xT?固定住產生 x t ? 1 x_{t-1} xt?1?的概率,可求得是一個和network無關的高斯分布,均值可以表示為:
-
而 P ( x t ? 1 ∣ x t ) P(x_{t-1}|x_t) P(xt?1?∣xt?)是由網絡決定的,我們不考慮它的variance,只考慮mean。
-
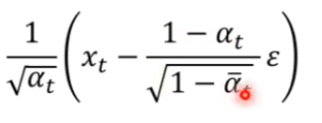
如果我們希望這兩個分布越接近越好,那就想辦法讓兩個分布的mean越接近越好。而上式中,僅有 ? \epsilon ?需要確定,因此我們希望網絡能夠預測這個值,從而完成推理。預測出這一項 ? \epsilon ?的過程,可以看作為從 x 0 x_0 x0?和 x t x_t xt?預測出 x t ? 1 x_{t-1} xt?1?的過程。
——切片傳參和解引用賦值)
)





:SpringBoot集成Gzip壓縮數據)
)

)



)
 condition_variable、wait、notify_one、notify_all)

![[Machine Learning] decision tree 決策樹](http://pic.xiahunao.cn/[Machine Learning] decision tree 決策樹)

