Remote Sensing,2023 | 基于SBL的分布式毫米波相干雷達成像的高效實現
注1:本文系“無線感知論文速遞”系列之一,致力于簡潔清晰完整地介紹、解讀無線感知領域最新的頂會/頂刊論文(包括但不限于 Nature/Science及其子刊; MobiCom, Sigcom, MobiSys, NSDI, SenSys, Ubicomp; JSAC, 雷達學報 等)。
本次介紹的論文是:2023,Remote Sensing | Ef?cient Implementation for SBL-Based Coherent Distributed mmWave Radar Imaging
文章DOI: https://doi.org/10.3390/rs15041054
文章動機
毫米波雷達因其小型化、高分辨率、長距離探測等優點,在汽車自動駕駛、交通監測、無人機避障等民用領域得到廣泛應用。但是,單雷達的角分辨率有限,難以滿足實際需求。本文提出在多個分布式小孔徑毫米波雷達之間實現相干合成,通過信號處理算法提高雷達系統的有效孔徑,從而改善角分辨率。
但是傳統的距離多普勒成像算法,在錯位數據情況下效果較差。而稀疏貝葉斯學習(SBL)算法由于魯棒性強、精度高,適合處理探測數據不連續的情況,可以用于分布式雷達成像。但是SBL算法計算復雜度高。
因此,本文針對FMCW雷達的數據結構特點,提出一種快速SBL算法,名稱為LC-SBL,可以大幅降低算法計算復雜度。該算法對增強分布式毫米波雷達的角分辨率具有重要意義。
文章思路
-
引言部分概述文章研究背景、問題和方法。
-
第二部分介紹分布式FMCW MIMO雷達系統模型,以及SBL算法原理。
-
第三部分是文章的核心貢獻部分。介紹針對雷達數據的特點,提出一種TBT矩陣求逆的新分解方法。并基于該分解提出LC-SBL快速算法,可以利用FFT快速計算。
-
第四部分是仿真驗證和實驗結果。分別用仿真數據和實際測量數據驗證LC-SBL算法在改進角分辨率和降低計算復雜度方面的優勢。
-
最后是結論部分,總結全文的貢獻。
好的,我繼續完成博客文章的撰寫:
LC-SBL算法的技術原理
LC-SBL算法的核心創新點是提出一種TBT矩陣逆矩陣的新分解方法。
在雷達成像問題中,采集到的回波信號r和成像結果u之間的關系可以表示為:
r = H u + η r=Hu+\eta r=Hu+η
其中 H H H是采樣矩陣,可以表示為傅立葉字典矩陣的形式。這樣 H H H對應的協方差矩陣是一個TBT矩陣:
F = H Λ H H F=H\Lambda H^H F=HΛHH
TBT矩陣具有Toeplitz塊圈矩陣的結構特點,如公式(15)所示。
為了快速求解u,需要對矩陣 Q = I + β F Q=I+\beta F Q=I+βF進行求逆運算。文章提出了一種新穎的TBT矩陣逆矩陣的分解方法:
將Q的逆矩陣表示為下三角Toeplitz塊矩陣 L ( x ) L(x) L(x)和圈矩陣 C ( J μ ) C(J\mu) C(Jμ)之積的和,具體如公式(40)所示。
Q ? 1 = L ( x ) C ( J μ  ̄ ) ? ( L ( μ ) ? I ) C ( J x  ̄ ) = L ( x ) C ( J μ  ̄ ) ? L ( μ ? E 0 ) C ( J x  ̄ ) \begin{aligned} \mathbf{Q}^{-1} & =\mathrm{L}(\mathbf{x}) C(\mathbf{J} \overline{\boldsymbol{\mu}})-(\mathrm{L}(\boldsymbol{\mu})-\mathbf{I}) \mathrm{C}(\mathbf{J} \overline{\mathbf{x}}) \\ & =\mathrm{L}(\mathbf{x}) \mathrm{C}(\mathbf{J} \overline{\boldsymbol{\mu}})-\mathrm{L}\left(\boldsymbol{\mu}-\mathbf{E}_0\right) \mathrm{C}(\mathbf{J} \overline{\mathbf{x}})\end{aligned} Q?1?=L(x)C(Jμ?)?(L(μ)?I)C(Jx)=L(x)C(Jμ?)?L(μ?E0?)C(Jx)?
這樣,原來需要大量計算的矩陣求逆運算,可以轉換為三角Toeplitz矩陣的線性卷積,和圈矩陣的圈卷積。這兩種運算可以通過FFT快速實現。
因此,文章提出的LC-SBL算法,可以將SBL中大部分時間耗費的運算,轉換為FFT運算,從而大幅降低算法復雜度。
仿真與實驗結果
為驗證LC-SBL算法的優勢,文章進行了仿真和實驗對比。
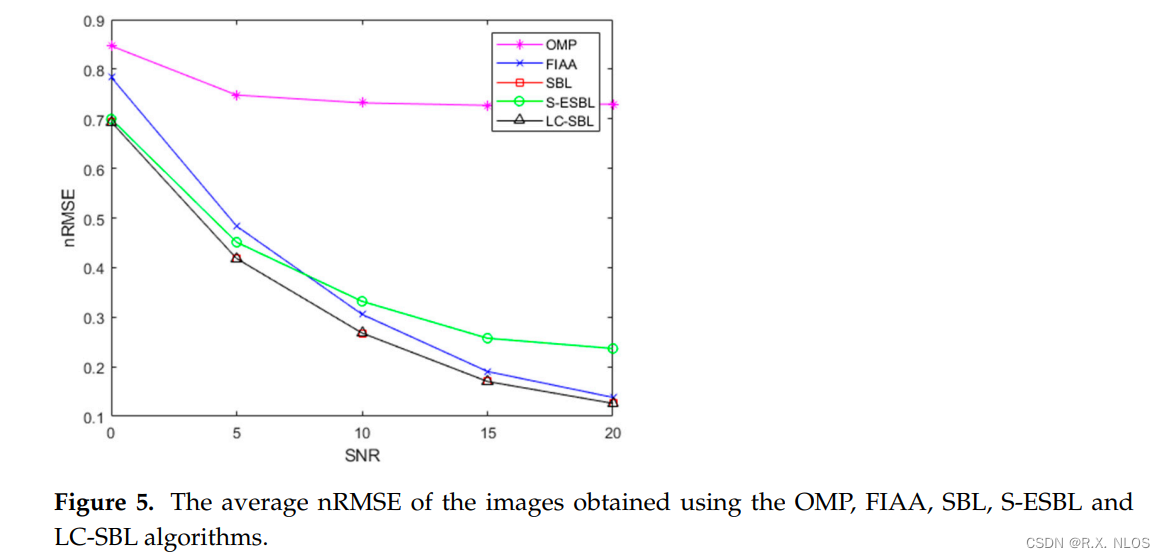
仿真方面,與FIAA、OMP、S-ESBL等算法進行比較,結果如圖5所示。LC-SBL的重構誤差最小,運行時間也是最短的。
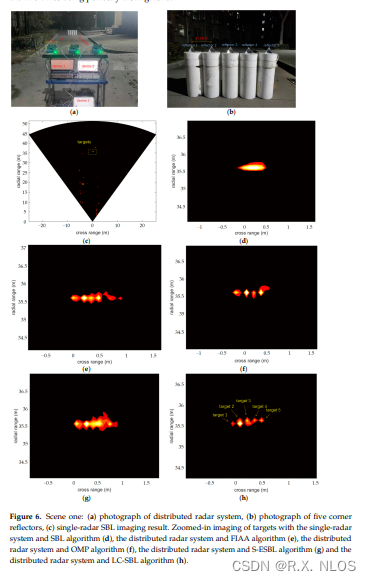
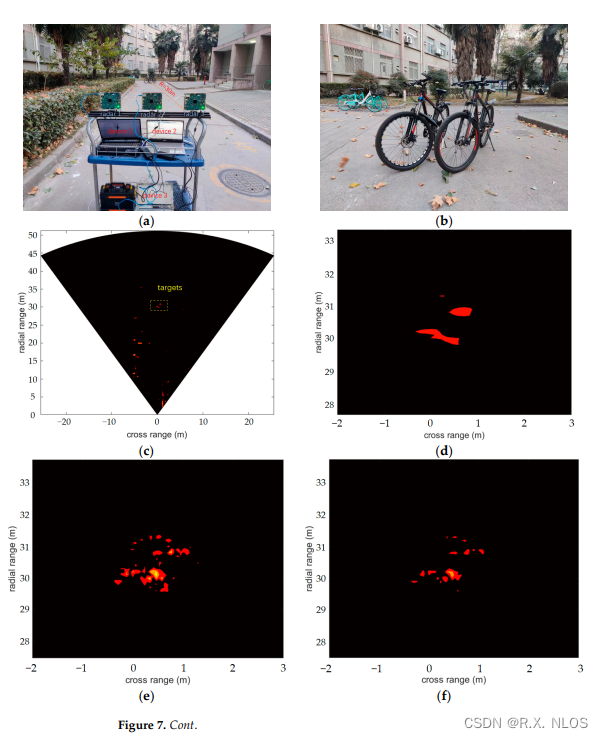
實驗部分,構建了一個三雷達的分布式毫米波雷達系統,對比單雷達系統和分布式雷達系統的成像效果。如圖6和圖7所示,在成像分辨率方面,LC-SBL優于FIAA、OMP、S-ESBL等算法。可以成功識別單雷達系統無法識別的多個目標。
總結與展望
- 本文針對分布式毫米波雷達成像問題,提出一種LC-SBL快速算法。其基于TBT矩陣的新分解思想,可以將大量計算轉化為FFT運算,從而大幅降低SBL算法的計算復雜度。
- 仿真和實驗結果表明,LC-SBL算法不僅計算效率高,也使分布式雷達系統獲得了與大孔徑雷達相當的高角分辨率。
- 未來可考慮在LC-SBL算法框架下,引入更多針對雷達任務的先驗知識,如目標稀疏性、形狀特征等,可望獲得更好的成像效果。







,訓練預測自己的【英文文本多分類】)

)









