故事凌 今天
基本知識點
圖可說是所有數據結構里面知識點最豐富的一個, 自己笨的知識點如下:
- 階(oRDER), 度: 出度(out-Degree), 入度(in-Degree)
- 樹(Tree), 森林(Forest), 環(Loop)
- 有向圖(Directed Graph), 無向圖(Undirected Graph), 完全有向圖, 完全無向圖
- 連通圖(Connected Graph), 連通分量(Connnected Component)
- 存儲和表達式: 鄰接矩陣(Adjacency Matrix), 鄰接鏈表(Adjacency List)
圍繞圖的算法也是五花八門
- 圖的遍歷: 深度優先, 廣度優先
- 環的檢測: 有向圖, 無向圖
- 拓撲排序
- 最短路徑算法: Dijkstra, Bellman-Ford, Floyd Warshall
- 連通性相關算法: Kosaraju, Tarjan, 求解孤島的數量, 判斷是否為樹
- 圖的著色, 旅行商問題等
以上的知識點知識圖輪里的冰山一角, 對于算法面試而言, 完全不需要對每個知識點都一一掌握, 而應該有的放矢的準備
必會的知識點
以下的知識點必須充分掌握并反復練習
- 圖的存儲和表達式: 鄰接矩陣(Adjacency Matrix), 鄰接鏈表(Adjacency List)
- 圖的遍歷: 深度優先, 廣度優先
- 二部圖的檢測(Bipartite), 數的檢測, 環的檢測, 有向圖, 無向圖
- 拓撲排序
- 聯合-查找算法(Union-Find)
- 最短路徑Dijkstra, BellMan-Ford
其中, 環的檢測, 二部圖的檢測, 樹的檢測以及拓撲都是基于圖的遍歷, 尤其是深度優先方式的遍歷, 而遍歷可以在鄰接矩陣或者鄰接鏈表上進行, 所以掌握好圖的遍歷是重中之重, 因為它是所有其他圖論算法的基礎
至于對端路徑算法, 能區分它們的不同特點, 知道在什么情況下用哪種算法就很好了, 對于有充足時間準備的面試者, 能熟練掌握他們的寫法當然是很好的
我們來來看看數據結構中的圖到底是什么
1. 圖的定義
圖是由一些點(vertex)和這些點之間的連線(edge)所組成的, 其中, 點通常稱為頂點(vertex), 而點到點之間的連線通常稱之為邊或者弧(edge), 通常記為G = (V,E)
2. 圖的分類
圖通常分為有向圖和無向圖, 而其表示方式分為鄰接矩陣和鄰接鏈表, 具體表示如下圖.
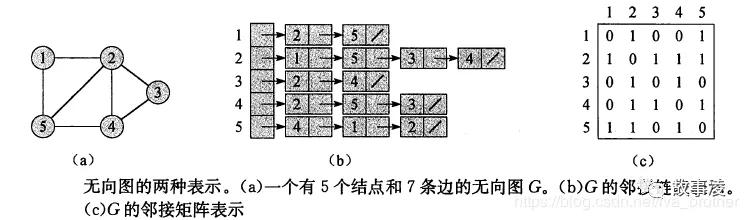
對于無向圖,其所有的邊都不區分方向。G=(V,E)。其中,
- V={1,2,3,4,5}。V表示有”1,2,3,4,5”幾個頂點組成的集合。
- E={(1,2),(1,5),(2,1),(2,5),(2,4),(2,3),(3,2),(3,4),(4,3),(4,2),(4,5),(5,1),(5,2),(5,4)}。E就是表示所有邊組成的集合,如(1,2)表示由頂點1到頂點2連接成的邊。
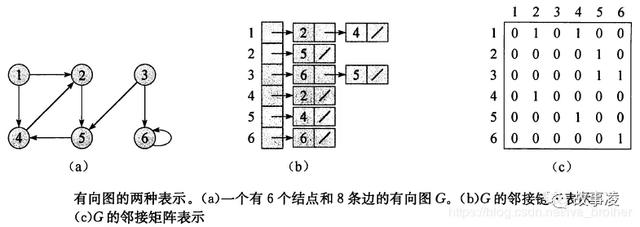
對于有向圖,其所有的邊都是有方向的。G=(V,E)。其中,
- V={1,2,3,4,5}。V表示有”1,2,3,4,5”幾個頂點組成的集合。
- E={<1,2>,<2,5><5,4>,<4,2><3,5>,<3,6>,<6,6>}。E就是表示所有邊組成的集合,如<1,2>表示由頂點1到頂點2連接成的邊。注意有向圖邊和無向圖邊表示方法的不同,有向圖的邊是矢量,而無向圖只是普通的括號。
針對鄰接矩陣和鄰接鏈表兩種不同的表示方式,有如下優缺點:
- 鄰接矩陣由于沒有相連的邊也占據空間,相對于鄰接鏈表,存在空間浪費的問題;
- 但是在查找的時候,鄰接鏈表會比較耗時,對于鄰接矩陣來說,它的查找復雜度就是O(1)。
用鄰接表表示圖的代碼
#define MAX 100typedef?struct?ENode???//鄰接表中表對應的鏈表的頂點{? ?int?ivex; ? ? ? ? ?//該邊所指向的頂點的位置? ?int?weight; ? ? ??//該邊的權值? ?struct?ENode?*next_edge; ??//指向下一條邊的指針}ENode,*PENode;typedef?struct?VNode???//鄰接表中表的頂點{? ?char?data; ? ? ??//頂點的數據? ?struct?VNode?*first_edge; ?//指向第一條依附該頂點的邊}VNode;typedef?struct?LGraph??//鄰接表{? ?int?vexnum; ? ?//圖的頂點數? ?int?edgenum; ??//圖的邊數? ?VNode?vexs[MAX];}LGraph;3. 度, 權, 連通圖等概念
對于無向圖來說,它的頂點的度就是指關聯于該頂點的邊的數目;而對于有向圖來說,分為入度和出度,所謂入度就是進入該頂點邊的數目,出度就是離開這個頂點邊的數目,有向圖的度就是入度加出度。
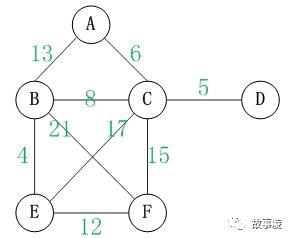
圖還被分為有權圖和無權圖,所謂有權圖就是每條邊都具有一定的權重,通常就是邊上的那個數字;而無權圖就是每條邊沒有權重,也可以理解為權重為。如下圖所示即為有權圖,(A,B)的權就是13。
如果一個無向圖中每個頂點到所有其他頂點都是可達的,則稱該圖是連通的;如果一個有向圖中任意兩個頂點互相可達,則該有向圖是強連通的。
如圖(b)中有3個連通分量:{1,2,5},{3,6},{4}。若一個無向圖只有一個連通分量,則該無向圖連通。
而圖(a)中有3個強連通分量:{1,2,4,5},{3},{6}。{1,2,4,5}中所有頂點對互相可達。而頂點2與6不能相互可達,所以不能構成一個強連通分量。
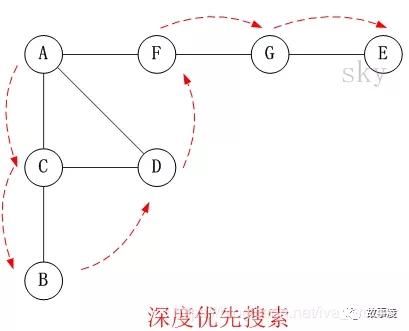
4. 深度優先搜索(Depth First Search DFS)
圖的深度優先算法有點類似于樹的前序遍歷,首先圖中的頂點均未被訪問,確定某一頂點,從該頂點出發,依次訪問未被訪問的鄰接點,直到某個鄰接點沒有未被訪問鄰接點時,則回溯父節點(此處我們將先被訪問的節點當做后被訪問節點的父節點,例如對于節點A、B,訪問順序是A ->B,則稱A為B的父節點),找到父節點未被訪問的子節點;如此類推,直到所有的頂點都被訪問到。
注意,深度優先的存儲方式一般是以棧的方式存儲。
- 無向圖的深度優先搜索
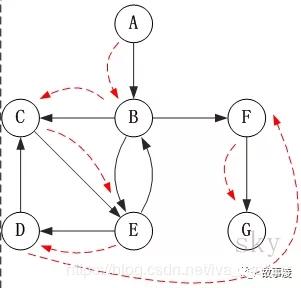
- 有向圖的深度優先搜索
- 深度優先搜索代碼
static?void?DFS(LGraph?G,?int?i,int?*visited){? ?Enode?*node;E? ?printf(“%c”,G.vexs[i].data);? ?node?=?G.vexs[i].first_edge;? ?while(node?!=?NULL)? {? ? ? ?if(!visited[node->ivex])? ? ? ? ? ?DFS(G,?node->ivex,?visited); ?//遞歸調用DFS? ? ? ?node?=?node->next_edge;? }}5. 廣度優先搜索
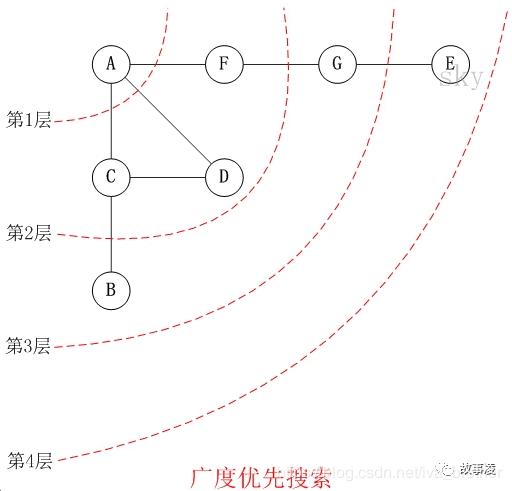
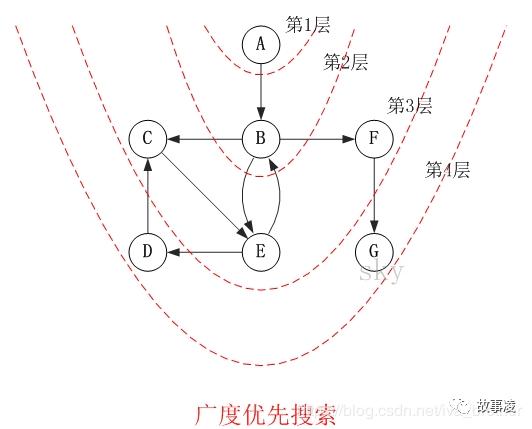
從圖中的某個頂點出發,訪問它所有的未被訪問鄰接點,然后分別從這些鄰接點出發訪問它的鄰接點。說白了就是一層一層的訪問,“淺嘗輒止”!
注意,廣度優先搜索的存儲方式一般是以隊列的方式存儲。
- 無向圖的廣度優先搜索
- 有向圖的廣度優先搜索
- 廣度優先所有代碼
void?BFS(LGraph?G){? ?int?head?=?0;? ?int?rear?=?0;? ?int?queue[MAX]; ??//輔助隊列? ?int?visited[MAX]; ??//頂點訪問標記? ?eNode?*node;? ?for(int?i?=?0;?i?ivex;? ? ? ? ? ? ? ?if(!visited[k])? ? ? ? ? ? ? {? ? ? ? ? ? ? ? ? ?visited[k]?=?1;? ? ? ? ? ? ? ? ? ?printf(“%c”,G.vesx[k].data);? ? ? ? ? ? ? ? ? ?queue[rear++]?=?k;? ? ? ? ? ? ? }? ? ? ? ? ? ? ?node?=?node->next_edge;? ? ? ? ? }? ? ? }? }? ?printf(“”);}6.拓撲排序
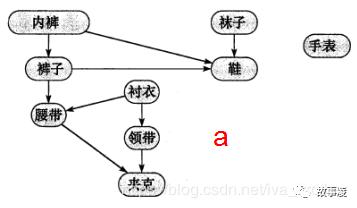
拓撲排序(Topological Order)是指講一個有向無環圖(Directed Acyclic Graph,DAG)進行排序而得到一個有序的線性序列。
舉個例子,例如我們早上起床的穿衣順序,如下圖所示。穿衣的順序也是有個優先級的,有些衣服就必須優先穿上,例如領帶依賴于襯衣,所以領帶最終排在襯衣之后;對圖a中的元素進行合理的排序,就得到了圖b的次序圖。注意,該次序圖不是唯一的。

int?topological_sort(LGraph?G){? ?int?num?=?G.vexnum;? ?ENode?*node;? ?int?head?=?0; ? ??//輔助隊列的頭? ?int?rear?=?0; ? ??// 輔助隊列的尾? ?int?*ins?=?(int?*)malloc(num?*?sizeof(int)); ? ? ??//入度數組? ?char?*tops?=?(char?*)malloc(num?*?sizeof(char)); ?//拓撲排序結果數組,記錄每個節點排序后的序號? ?int?*queue?=?(int?*)malloc(num?*?sizeof(int)); ? ??//輔助隊列? ?assert(ins?!=?NULL?&&?tops?!=?NULL?&&?queue?!=?NULL)? ?memset(ins,?0,?num?*?sizeof(int));? ?memset(tops,?0,?num?*?sizeof(char));? ?memset(queue,?0,?num?*?sizeof(int));? ?for(int?i?=?0;?i?ivex]++;? ? ? ? ? ?node?=?node->next_edge;? ? ? }? }? ?for(int?i?=?0;?i?ivex]--; ? ?//將節點node關聯的節點的入度減1? ? ? ? ? ?if(ins[node->ivex]?==?0) ??//若節點的入度為0,則將其添加到隊列中? ? ? ? ? ? ? ?queue[rear++]?=?node->ivex;? ? ? ? ? ?node?=?node->next_edge;? ? ? }? }? ?if(index?!=?G.vexnum)? {? ? ? ?printf(“Graph?has?a?cycle!”);? ? ? ?free(queue);? ? ? ?free(ins);? ? ? ?free(tops);? ? ? ?return?1; ?//1表示失敗,該有向圖是有環的? }? ?printf(“==?TopSort:?”); ??//打印拓撲排序結果? ?for(int?i?=?0;?i?7. 最小生成樹
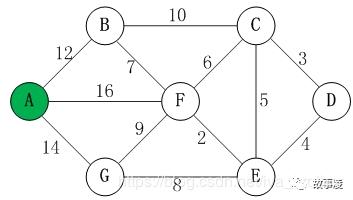
所謂最小生成樹就是將圖中的頂點全部連接起來,此時這個邊的權重最小,并且連接起來的是一個無環的樹。很容易知道,若此時的頂點是n,則邊的數量為n-1。所以在一個圖中找最小生成樹就是找最小權值的邊,讓這些邊連成一棵樹。常用的算法有Prim算法和Kruskal算法。
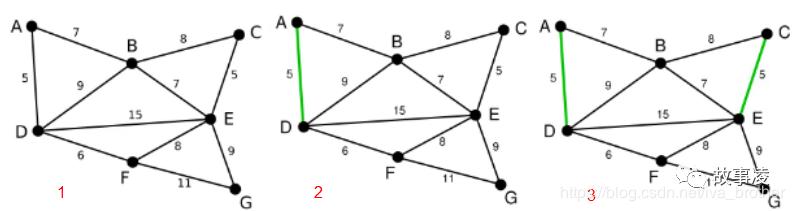
7. 1Prim算法
該算法就是每次迭代選擇權值最小的邊對應的點,加入到最小生成樹中。具體實現如下所示。
第一步:選取頂點A,此時U={A},V-U={B,C,D,E,F,G}。
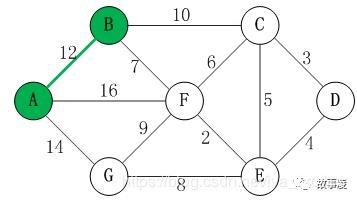
第二步:選取與A點連接的權值最小的邊,此時就會選擇到B,U={A,B},V-U={C,D,E,F,G}。
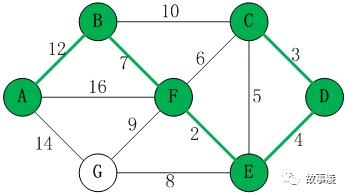
以上面的步驟類推,得到如上圖所示的結果,此時U={A,B,C,D,E,F},V-U={G}。注意到C是此次加入的點,而G沒有加入,此時G點的邊應該如何選擇?
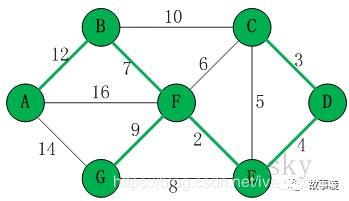
最終,得到如圖所示的最小生成樹,此時U={A,B,C,D,E,F,G},V-U={}。
#define INF (~(0x1<<31)) ?//最大值(即0X7FFFFFFF)//返回ch在鄰接表中的位置static?int?get_position(LGraph?G,?char?ch){? ?for(int?i?=?0;?i?的權值;若start到end不連通,則返回無窮大? ?int?getWeight(LGraph?G,?int?start,?int?end)? {? ? ? ?ENode?*node;? ? ? ?if(start?==?end)? ? ? ? ? ?return?0;? ? ? ?node?=?G.vexs[start].first_edge;? ? ? ?while(node?!=?NULL)? ? ? {? ? ? ? ? ?if(end?==?node->ivex)? ? ? ? ? ? ? ?return?node->weight;? ? ? ?node?=?node->next_edge;? ? ? }? ? ? ?return?INF;? }? ?void?Prim(LGraph?G,int?start) ?//從圖中的第start個元素開始,生成最小樹? {? ? ? ?int?index?=?0; ? ?//prim最小樹的索引,即prims數組的索引? ? ? ?char?prims[MAX]; ?//prim最小樹的結果數組? ? ? ?int?wights[MAX]; ??//頂點間邊的權重? ? ? ?//prim最小生成樹中第一個數,即圖中的第start個數? ? ? ?prims[index++]?=?G.vexs[start].data;? ? ? ?for(int?i?=?0;?i?7.2 Kruskal算法
該算法的核心就是對權值進行排序,然后從最小的權值開始,不斷增大權值,如何該權值的所在邊的兩個頂點沒有存在的路徑連在一起,則加入這條邊,否則,則舍棄這條邊,知道所有的點都在這顆樹中。
如下所示的一個圖,我們從中找出最小生成樹。
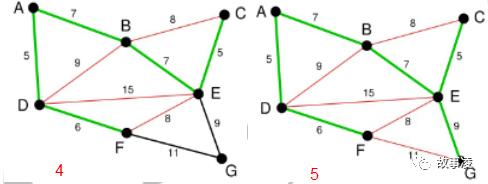
對于左邊所示的圖,對各個邊的權值排序之后,我們最先找到權值最小的邊,即AD。然后我們發現還有一個CE,于是CE也會被標記起來。
對于左邊所示的圖,對各個邊的權值排序之后,我們最先找到權值最小的邊,即AD。然后我們發現還有一個CE,于是CE也會被標記起來。
typedef?struct?edata??//邊的結構體{? ?char?start; ?//邊的起點? ?char?end; ??//邊的終點? ?int?weight; ?//邊的權重}EData;EData?*get_edges(LGraph?G){? ?int?index?=?0;? ?ENode?*node;? ?EData?*edges;? ?edges?=?(EData?*)malloc(G.edgnum?*?sizeof(EData));? ?for(int?i?=?0;?i?ivex?>?i)? ? ? ? ? {? ? ? ? ? ? ? ?edges[index].start?=?G.vexs[i].data;? ? ? ? ? ? ? ?edges[index].end?=?G.vexs[node->ivex].data;? ? ? ? ? ? ? ?edges[index].weight?=?node->weight;? ? ? ? ? ? ? ?index++;? ? ? ? ? }? ? ? ? ? ?node?=?node->next_edge;? ? ? }? }? ?return?edges;}void?Kruskal(LGraph?G){? ?int?index?=?0; ? ??//rets數組的索引? ?int?vends[MAX]?=?{0}; ? ?//用于保存“已有最小生成樹”中每個頂點在該最小樹中的終點? ?EData?rets[MAX]; ? ?//結果數組,保存kruskal最小生成樹的邊? ?EData?*edges; ? ??//圖對應的所有邊? ?edges?=?get_edges(G); ??//獲取圖中所有的邊? ?Sorted_edges(edges,?G.edgenum); ??//對邊按照權值進行排序? ?for(int?i?=?0;?i?例題分析
785. 判斷二分圖
給定一個無向圖graph,當這個圖為二分圖時返回true。
如果我們能將一個圖的節點集合分割成兩個獨立的子集A和B,并使圖中的每一條邊的兩個節點一個來自A集合,一個來自B集合,我們就將這個圖稱為二分圖。
graph將會以鄰接表方式給出,graph[i]表示圖中與節點i相連的所有節點。每個節點都是一個在0到graph.length-1之間的整數。這圖中沒有自環和平行邊:graph[i] 中不存在i,并且graph[i]中沒有重復的值。
示例 1:輸入: [[1,3], [0,2], [1,3], [0,2]]輸出: true解釋:無向圖如下:0----1| ? || ? |3----2我們可以將節點分成兩組: {0, 2} 和 {1, 3}。示例 2:輸入: [[1,2,3], [0,2], [0,1,3], [0,2]]輸出: false解釋:無向圖如下:0----1| || |3----2我們不能將節點分割成兩個獨立的子集。好了, 自己研究了半天, 題都沒有研究明白,我決定放棄了, 要是哪個大佬知道, 快來教教我吧, 我們今天把樹是個什么東西就好了!
graph 的長度范圍為 [1, 100]。graph[i] 中的元素的范圍為 [0, graph.length - 1]。graph[i] 不會包含 i 或者有重復的值。圖是無向的: 如果j 在 graph[i]里邊, 那么 i 也會在 graph[j]里邊。







)
![[SQL]LeetCode183. 從不訂購的客戶 | Customers Who Never Order](http://pic.xiahunao.cn/[SQL]LeetCode183. 從不訂購的客戶 | Customers Who Never Order)




![[No0000178]改善C#程序的建議1:非用ICloneable不可的理由](http://pic.xiahunao.cn/[No0000178]改善C#程序的建議1:非用ICloneable不可的理由)


)


你可以這樣學)