LabVIEW使用圖像處理進行交通控制性能分析
采用普雷維特、拉普拉斯、索貝爾和任意的空間域方法對存儲的圖像進行邊緣檢測,并獲取實時圖像。然而,對四種不同空間域邊緣檢測方法的核的性能分析。
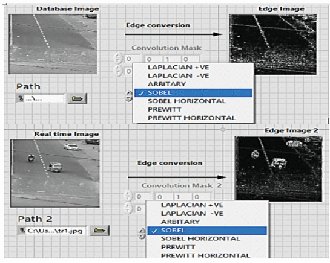
以前,空路圖像存儲在數據庫中,道路上沒有任何車輛。將圖像轉換為陣列,其中應用四種不同的邊緣檢測方法與存儲圖像以及捕獲的實時圖像進行卷積,以生成存儲圖像和實時圖像的邊緣檢測。均方根誤差指標用于計算存儲和捕獲的邊緣檢測到的圖像的結果分析。根據獲得的誤差,計算時間估計并將其應用于交通信號燈顯示桿,然后允許車輛沿一個方向向其他方向移動。對于相對于特定方向上存在的交通密度的所有方向,都動態遵循該過程。
因此,應用四種不同的空間域邊緣檢測方法來區分原始圖像的邊緣。交通信號燈的主要問題是由交警手動完成的。因此,專注于無需人工干預的計時自動化,使用相機視覺是降低人力資源和計算成本的方法。Sobel算子邊緣檢測方法是一種離散差分算子,用于計算圖像的近似梯度以更改強度級別。其余三種邊緣檢測方法使用拉普拉斯(正負)算子、Prewitt(垂直和水平)算子、任意算子和Sobel(垂直和水平)算子的不同類型的掩模或核對從指定位置捕獲的實時圖像進行測試。此外,計算所需圖像上的誤差估計,以分析和管理相對于通道的時序,以打開和關閉信號柱的信號。
實時圖像通過相機捕獲,其處于固定位置和要覆蓋的固定區域,用于連續監視相對于存儲在數據庫中的圖像所捕獲的圖像。在這里,從車道。
該方案是將數據庫中預存儲的圖像與攝像機定期捕獲的實時圖像進行比較,以了解系統流量的動態變化。為了理解執行流程,設置時間控制。
數據庫中預先存儲的道路圖像被轉換為二維數組。數據數組與由拉普拉斯、普雷維特、索貝爾和任意方法固定的內核或掩碼進行卷積,以從原始圖像生成邊緣提取。在并行處理中,實時圖像的連續捕獲被轉換為2D圖像。轉換后的數據與內核卷積以提取實時圖像中的邊緣。現在計算預存儲圖像和實時捕獲圖像的均方根值。然后將邊緣檢測出預存儲的圖像和實時圖像進行比較,以計算RMSE。將檢測到的邊緣的RMSE結果除以2,以便將RMSE值減少并固定在百范圍內。對有和沒有邊沿檢測圖像的RMSE求和進行平均,以生成處理交通控制的時序。
捕獲圖像的步驟是固定我們在交通中看到的相機位置。盡管攝像頭用于放大和縮小以查看實時流量,但為了應用所提出的方案,我們需要固定要覆蓋的區域以計算流量。固定區域被限制為默認區域,以實時捕獲圖像。動態定時計算設置攝像機視圖的計時器始終固定為預存儲的圖像(存儲在數據庫中)或攝像機系統內以適當地處理流量。
?
實施擬議方案所涉及的步驟:
???????第1步:
獲取存儲在數據庫中的圖像(考慮道路上沒有車輛)和相機實時捕獲的另一個圖像。
???????第2步:
從1生成數據庫圖像的RMSE和相機捕獲的實時圖像。
???????第3步:
從1將數據庫和捕獲的圖像轉換為2D數組數據。
???????第4步:
從3開始,來自數據庫和捕獲圖像的2D數組數據通過應用四個不同內核(拉普拉斯、Prewitt、Sobel和任意)中的任何一個來從兩個圖像中提取邊緣來轉換。
???????第5步:
從4開始,比較生成的邊緣圖像以計算RMSE值,然后將結果除以10。
???????第6步:
將步驟2和步驟4中的RMSE值相加,然后將結果值除以4,以生成計時器值。
???????第7步:
定時器值應用于信號柱以啟動定時器。
???????第8步:
對任何車道動態重復步驟2到步驟7的相同過程,以計算任何時刻的計時器值,以允許道路上特定方向的交通。
分析了所提方案在有無車輛的情況下,利用數據庫對道路上有車輛和無車輛進行仿真,并使用拉普拉斯算子、普雷維特算子、任意算子和索貝爾算子四種不同時域方法利用相機采集的實時圖像進行仿真。使用圖像處理的動態交通控制系統是自動化的,它減少了人力。與許多其他技術不同,所提出的方案可以承受任何類型的大氣條件,并且易于實現系統。
這是LabVIEW的一個應用,更多的開發案例,歡迎登錄北京瀚文網星官網,了解更多信息。有需要LabVIEW項目合作開發,請與我們聯系。
?

![自然語言處理從入門到應用——LangChain:記憶(Memory)-[記憶的存儲與應用]](http://pic.xiahunao.cn/自然語言處理從入門到應用——LangChain:記憶(Memory)-[記憶的存儲與應用])

Unity開發Vision Pro介紹)


 - 使用label組件)

---死鎖和Synchronized加鎖流程)




: 數據倉庫與ETL的關系及ETL工具推薦)





