ProlificDreamer 論文閱讀
Project指路:https://ml.cs.tsinghua.edu.cn/prolificdreamer/
論文簡介:截止2023/8/10,text-to-3D的baseline SOTA,提出了VSD優化方法
前置芝士:text-to-3D任務簡介
text-to-3D Problem
text-to-3D 解決的問題就是給定一段話,生成視角一致的3D場景,如果了解過這個領域的可以略過不看
研發路線大概是dreamfeild->dreamfusion->polificdreamer
Diffusion Model
text-to-image領域Diffusion Model很厲害,所以基本上就是Extend Diffusion Model to 3D,想看Diffusion Model簡介可以看我之前的博文:
生成模型的Basic Idea就是真實圖片作為隨機分布,每個text是條件。
- Diffusion Model訓練出了一個條件分布 p ( x ∣ y ) p(\mathbf x|y) p(x∣y),x是圖片,y是條件(text),其Loss Function可以表達為 L D i f f ( ? ) : = E x 0 ~ q ( x 0 ) , t ~ U ( 0 , 1 ) , ? ~ N ( 0 , 1 ) [ w ( t ) ∥ ? ? ( α t x 0 + σ t ? ) ? ? ∥ 2 2 ] \mathcal L_{Diff}(\phi) := \mathbb E_{x_0\sim q(x_0),t\sim \mathcal U(0,1),\epsilon \sim \mathcal N(0,1)}[w(t)\|\epsilon_\phi(\alpha_tx_0+\sigma_t\epsilon)-\epsilon\|^2_2] LDiff?(?):=Ex0?~q(x0?),t~U(0,1),?~N(0,1)?[w(t)∥???(αt?x0?+σt??)??∥22?]
text-to-3D 基本思路
- θ \theta θ是3D表達的參數, c c c是參數,那么3D渲染的本質是 x = g ( θ , c ) \mathbf{x}=g(\theta, c) x=g(θ,c),如果過程是可微的,稱為DIP(differentiable image parameterization)
- 對于2D, x 0 ~ q ( x 0 ) x_0\sim q(x_0) x0?~q(x0?)代表Sample過程,是真實圖片的分布,而text-to-3D就是把Loss變成 L D i f f ( ? , x = g ( θ , c ) ) \mathcal L_{Diff}(\phi,\mathbf{x}=g(\theta, c)) LDiff?(?,x=g(θ,c)),去優化 θ \theta θ
Prolific Dreamer Basic Idea
符號
- prolific dreamer這篇文章進一步研究,認為一個合理的3D表達也是一個分布,也就是 θ ~ μ ( θ ∣ y ) \theta\sim \mu(\theta|y) θ~μ(θ∣y)
- 渲染出來的圖片: q 0 μ ( x 0 ∣ c , y ) : = ∫ q 0 μ ( x 0 ∣ c , y ) p ( c ) d c q_0^\mu(x_0|c,y):=\int q_0^\mu(x_0|c,y)p(c)dc q0μ?(x0?∣c,y):=∫q0μ?(x0?∣c,y)p(c)dc
- diffusion model渲染出來的圖片: p 0 ( x 0 ∣ y ) p_0(x_0|y) p0?(x0?∣y)
優化目標
優化一個參數分布,使得它和Diffusion Model生成的結果接近(pretrained)
min ? μ D K L ( q 0 μ ( x 0 ∣ y ) ∥ p 0 ( x 0 ∣ y ) ) \min_\mu D_{KL}(q_0^\mu(x_0|y)\| p_0(x_0|y)) μmin?DKL?(q0μ?(x0?∣y)∥p0?(x0?∣y))
算法
Loss Function
根據上述優化目標,可以提出如下的Loss

BTW,為什么這個等號成立我是不太理解的(原論文說是KL Divergence的性質),占個坑
我認為這個步驟其實就是cover Diffusion Model的步驟, q t μ ( x t ∣ y ) : = ∫ q 0 μ ( x 0 ∣ c , y ) p t 0 ( x t ∣ x 0 ) d x 0 q_t^\mu(x_t|y):=\int q_0^\mu(x_0|c,y)p_{t0}(x_t|x_0)dx_0 qtμ?(xt?∣y):=∫q0μ?(x0?∣c,y)pt0?(xt?∣x0?)dx0?,也就是給定camera,把某張圖片渲染出來之后拿去上t步高斯噪聲的分布,讓這個分布和Diffsuion Model 第t步的圖片分布盡可能接近。
這已經是一個非常形式化的優化目標了。接下來考慮優化手段。
Optimization
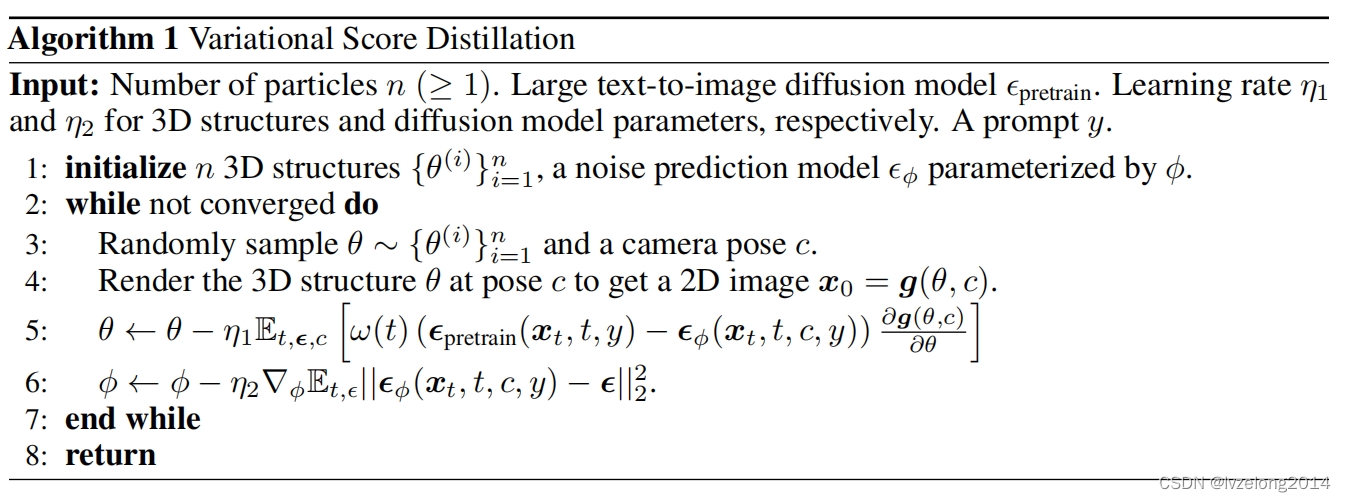
采用Wasserstein gradient flow of VSD,簡單理解就是,用 { θ } i = 1 n \set\theta_{i=1}^n {θ}i=1n?這n個參數“粒子”去模擬 μ ( θ ∣ y ) \mu(\theta|y) μ(θ∣y),然后優化的時候就是優化每個粒子參數。
基于此,問題轉化解如下的一個ODE:

第一項是Diffusion Model生成的帶噪音的真實圖片的score function,所以它由預訓練好的 ? p r e t r a i n ( x t , t , y ) \epsilon_{pretrain}(x_t,t,y) ?pretrain?(xt?,t,y)生成
第二項是渲染出來圖片生成的帶噪聲的圖片的score function,它由根據一個新網絡 ? ? ( x t , t , c , y ) \epsilon_\phi(x_t,t,c,y) ???(xt?,t,c,y)生成,這個網絡采用LoRA 技術,微調 ? p r e t r a i n \epsilon_{pretrain} ?pretrain?再embedding一個c進去。
所以進一步轉化:

并得到了如下的算法

這篇文章的做法到這里介紹完畢。
數學原理
占坑代填,孩子暫時不會泛函推不了

)





)





:簡單介紹)
)



 Centos7 高可用集群)
