PID 算法
使用環境:受到外界的影響不能按照理想狀態發展。如小車的速度不穩定的調節,盡快達到目標速度。
條件:閉環系統->有反饋
要求:快準狠
分類:位置式、增量式
增量式
輸入:前次速度、前前次速度、前前前次速度
輸出:pwm的增加值或減少值
位置式
輸入:
輸出:
公式
 或
或

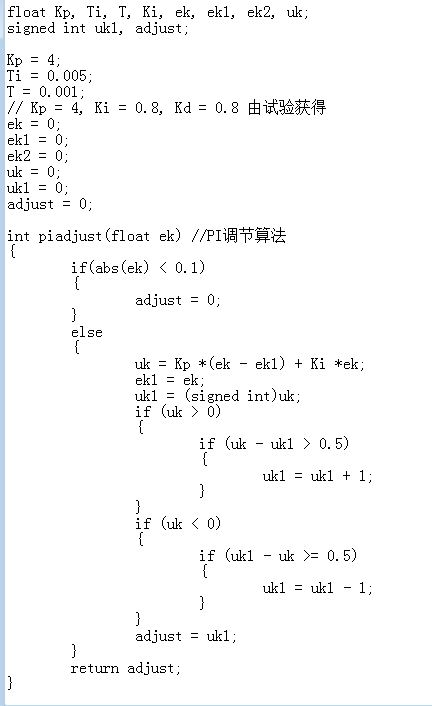
Kp 比例放大系數???? Ti? 積分時間??? Td 微分時間
Kp比例放大系數? Ki 積分系數? Kd 微分系數
?
程序
?
?
首先,置Kd=Ki=0,然后增加比例系數一直到系統開始振蕩(閉環系統的極點在jω軸上);
再將該比例系數乘以0.6,其他參數按照以下公式計算:
Kp = 0.6*Km
Kd = Kp*π/4*ω
Ki = Kp*ω/π ?
上式中Kp為比例控制參數
Kd為微分控制參數
Ki為積分控制參數
Km為系統開始振蕩時的比例值;
ω為振蕩時的頻率 參數整定找最佳,從小到大順序查 先是比例后積分,最后再把微分加 曲線振蕩很頻繁,比例度盤要放大 曲線漂浮繞大灣,比例度盤往小扳 曲線偏離回復慢,積分時間往下降 曲線波動周期長,積分時間再加長 曲線振蕩頻率快,先把微分降下來 動差大來波動慢,微分時間應加長 理想曲線兩個波,前高后低4比 1 一看二調多分析,調節質量不會低
?
?
?
??
??
??
??
??
??
??
??
??
??
??
??
?
?
?
??
??
??
??
??
??
??
??
??
??
??
??
?
?
?
?



EasyUI使用——datagrid數據表格)







--認識redis)







