剛開始錄制的數據時沒有考慮相機和IMU之間的坐標變換,但是后來發現跟蹤效果不好,去查驗imu數據時,發現,我采集保存的imu數據格式沒有和euroc數據集中的imu數據保存格式統一,所以需要研究的是在euroc用于數據采集的設備中的相機和imu之間的坐標系變換關系,我的設備相機和imu之間的坐標系變換關系,然后按照euroc數據保存格式來保存我采集的數據。
下面是euroc數據集使用的數據采集設備,使用的是左手坐標系,相機朝向與z軸朝向相反,相機與imu之間的位姿變換是,順時針旋轉90度,
Euroc數據集的采集工具所有的設備中相機和imu之間的坐標變換。滿足右手坐標系,從相機到imu的旋轉是,繞著在z軸(根據圓點的標志,z軸是垂直于屏幕朝外的)順時針(以上帝的視角對著z軸的正方向看向xoy平面)旋轉90度。
?

下面這個圖標記錯了。?

 ?
?
下面是vins室內數據采集設備,?采用右手坐標系,z軸和相機軸重合,相機朝向和z軸朝向重合,相機到imu的位姿變換是,繞z軸順時針旋轉90度。

?
?vins用來室外數據采集的設備,相機系是右手坐標系,相機朝向和z軸方向重合,相機到imu之間的位姿變化需要經過兩個步驟變換,首先是繞x軸順時針旋轉90度,然后是繞新的z軸逆時針旋轉90度,繞哪個軸旋轉就要從哪個軸看進去,然后判斷是順時針還是逆時針,上述連續旋轉的方式,需要使用左乘的方式來表示連乘。
?

 ?
?
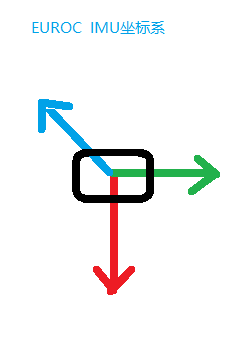
我們的采集設備相機和imu坐標系圖。相機是標準的右手系,imu是左手系,經過測試發現,imu實際的坐標系和標注的坐標系是相反的。(哪個軸的方向和重力方向重合,哪個軸上輸出的加速度的值應該為正值)。EUROC數據集中提供的imu數據的重力軸在x軸上,并且值為正,說明,x軸的正方向和重力方向重合,是朝下的。下面兩個圖對比可知,我們的設備IMU坐標系和EUROC數據集的IMU坐標系,X軸和Z軸是對調的,并且Y軸是相反的,所以為了將自采的imu數據向EUROC數據集中imu數據對齊則,需要進行如下操作: ax = Za; ay = -Ya; az = Xa; 將加速度數據調整的同時,也需要對對應的角速度數據進行調整:
wx = Zw; wy = -Yw; wz = Xw;? 并且在之前,將自采的Imu 數據和EUROC數據集的imu數據對比,得出,后者采用的是弧度單位,而我們采集的數據是以度為單位,所以要在所有獲得的角度數據上除以57.296(180/pi),并且在加速度數據上都乘以了9.8.之所以要乘以9.8,應該是與imu的前期設置有關,這個需要問一下小潘潘。
 ?
?
?進行完數據的調整之后,再次跑數據集,仍然會出現亂漂的情況,我干脆打開配置文件,想著修改哪個參數,實現,不用每次都重新打開rviz窗口的問題,但是打開config文件后,我尋思著隨便改改吧,看到了rolling_shutter這個參數,我之前一直認為我們的相機是rolling_shutter相機,就是卷簾相機,所以這個參數設置為1,但是我這次改成了0,試一下,發現,我靠,不漂了,鵬哥說是global shutter,這下才知道我們的相機是global shutter相機,哎,配置文件里的參數還是要多多研究的。長見識了。






---寫的一個推文)












