疑點解答:
攝像機矩陣由內參矩陣和外參矩陣組成,對攝像機矩陣進行QR分解可以得到內參矩陣和外參矩陣。
內參包括焦距、主點、傾斜系數、畸變系數
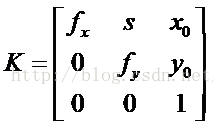
其中,fx,fy為焦距,一般情況下,二者相等,x0、y0為主點坐標(相對于成像平面),s為坐標軸傾斜參數,理想情況下為0
?
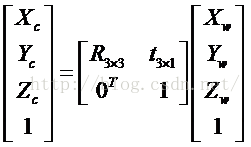
外參包括旋轉矩陣R3×3、平移向量T3×1,它們共同描述了如何把點從世界坐標系轉換到攝像機坐標系,旋轉矩陣描述了世界坐標系的坐標軸相對于攝像機坐標軸的方向,平移向量描述了在攝像機坐標系下空間原點的位置。
轉::標定雙目后,首先要根據其畸變系數來校正原圖,可以參考
http://blog.csdn.net/qq_15947787/article/details/51471535
?
[cpp]?view plain?copy
- Mat?jiaozheng(?Mat?image?)??
- {??
- ????Size?image_size?=?image.size();??
- ????float?intrinsic[3][3]?=?{589.2526583947847,0,321.8607532099886,0,585.7784771038199,251.0338528599469,0,0,1};??
- ????float?distortion[1][5]?=?{-0.5284205687061442,?0.3373615384253201,?-0.002133029981628697,?0.001511983002864886,?-0.1598661778309496};??
- ????Mat?intrinsic_matrix?=?Mat(3,3,CV_32FC1,intrinsic);??
- ????Mat?distortion_coeffs?=?Mat(1,5,CV_32FC1,distortion);??
- ????Mat?R?=?Mat::eye(3,3,CV_32F);?????????
- ????Mat?mapx?=?Mat(image_size,CV_32FC1);??
- ????Mat?mapy?=?Mat(image_size,CV_32FC1);??????
- ????initUndistortRectifyMap(intrinsic_matrix,distortion_coeffs,R,intrinsic_matrix,image_size,CV_32FC1,mapx,mapy);??
- ????Mat?t?=?image.clone();??
- ????cv::remap(?image,?t,?mapx,?mapy,?INTER_LINEAR);??
- ????return?t;??
- }??
?
?
?
?
?
?
?
?
校正完成后就可以進行坐標計算了,分兩種
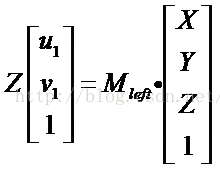
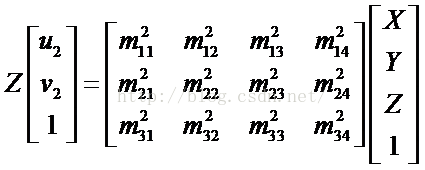
(1)世界坐標系——>像面坐標系
首先將世界坐標系——>攝像機坐標系
已知某點在世界坐標系中的坐標為(Xw,?Yw,?Zw),由旋轉和平移矩陣可得攝像機坐標系和世界坐標系的關系為
然后將攝像機坐標系——>像面坐標系
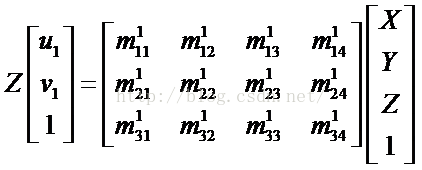
?
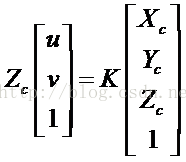
其中[u?v?1]T為點在圖像坐標系中的坐標,[Xc?Yc??Zc??1]T為點在攝像機坐標系中的坐標,K為攝像機內參數矩陣。
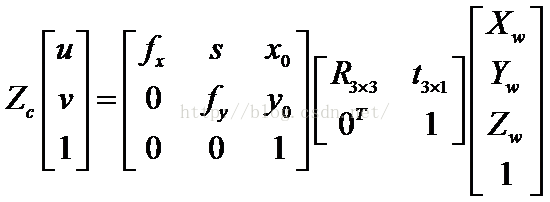
這樣最終可以得到:
(2)像面坐標系——>世界坐標系
光軸會聚模型:
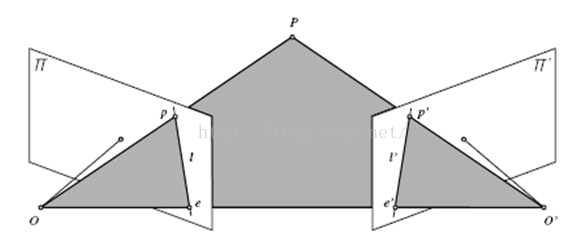
對于兩相機分別有:
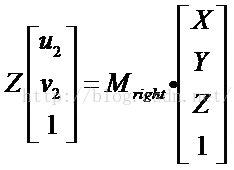
公式56,左邊Z應分別為Zc1,Zc2
其中,

這樣可以把(5)(6)寫成
公式8左邊Z應為Zc1
公式9左邊Z應為Zc2
將(8)(9)整理可以得到
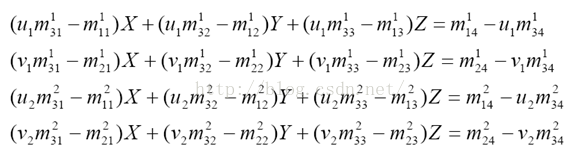
以上公式參考評論6樓?wisemanjack?
采用最小二乘法求解X,Y,Z,在opencv中可以用solve(A,B,XYZ,DECOMP_SVD)求解
?
代碼如下:
[cpp]?view plain?copy
- //opencv2.4.9?vs2012??
- #include?<opencv2\opencv.hpp>??
- #include?<fstream>??
- #include?<iostream>??
- ??
- using?namespace?std;??
- using?namespace?cv;??
- ??
- Point2f?xyz2uv(Point3f?worldPoint,float?intrinsic[3][3],float?translation[1][3],float?rotation[3][3]);??
- Point3f?uv2xyz(Point2f?uvLeft,Point2f?uvRight);??
- ??
- //圖片對數量??
- int?PicNum?=?14;??
- ??
- //左相機內參數矩陣??
- float?leftIntrinsic[3][3]?=?{4037.82450,?????????????0,?????947.65449,??
- ??????????????????????????????????????0,????3969.79038,?????455.48718,??
- ??????????????????????????????????????0,?????????????0,?????????????1};??
- //左相機畸變系數??
- float?leftDistortion[1][5]?=?{0.18962,?-4.05566,?-0.00510,?0.02895,?0};??
- //左相機旋轉矩陣??
- float?leftRotation[3][3]?=?{0.912333,???????-0.211508,???????0.350590,???
- ????????????????????????????0.023249,???????-0.828105,??????-0.560091,???
- ????????????????????????????0.408789,????????0.519140,??????-0.750590};??
- //左相機平移向量??
- float?leftTranslation[1][3]?=?{-127.199992,?28.190639,?1471.356768};??
- ??
- //右相機內參數矩陣??
- float?rightIntrinsic[3][3]?=?{3765.83307,????????????0,?????339.31958,??
- ????????????????????????????????????????0,??3808.08469,?????660.05543,??
- ????????????????????????????????????????0,???????????0,?????????????1};??
- //右相機畸變系數??
- float?rightDistortion[1][5]?=?{-0.24195,?5.97763,?-0.02057,?-0.01429,?0};??
- //右相機旋轉矩陣??
- float?rightRotation[3][3]?=?{-0.134947,??????0.989568,??????-0.050442,???
- ??????????????????????????????0.752355,??????0.069205,??????-0.655113,???
- ?????????????????????????????-0.644788,?????-0.126356,??????-0.753845};??
- //右相機平移向量??
- float?rightTranslation[1][3]?=?{50.877397,?-99.796492,?1507.312197};??
- ??
- ??
- int?main()??
- {??
- ????//已知空間坐標求成像坐標??
- ????Point3f?point(700,220,530);??
- ????cout<<"左相機中坐標:"<<endl;??
- ????cout<<xyz2uv(point,leftIntrinsic,leftTranslation,leftRotation)<<endl;??
- ????cout<<"右相機中坐標:"<<endl;??
- ????cout<<xyz2uv(point,rightIntrinsic,rightTranslation,rightRotation)<<endl;??
- ??
- ????//已知左右相機成像坐標求空間坐標??
- ????Point2f?l?=?xyz2uv(point,leftIntrinsic,leftTranslation,leftRotation);??
- ????Point2f?r?=?xyz2uv(point,rightIntrinsic,rightTranslation,rightRotation);??
- ????Point3f?worldPoint;??
- ????worldPoint?=?uv2xyz(l,r);??
- ????cout<<"空間坐標為:"<<endl<<uv2xyz(l,r)<<endl;??
- ??
- ????system("pause");??
- ??
- ????return?0;??
- }??
- ??
- ??
- //************************************??
- //?Description:?根據左右相機中成像坐標求解空間坐標??
- //?Method:????uv2xyz??
- //?FullName:??uv2xyz??
- //?Access:????public???
- //?Parameter:?Point2f?uvLeft??
- //?Parameter:?Point2f?uvRight??
- //?Returns:???cv::Point3f??
- //?Author:????小白??
- //?Date:??????2017/01/10??
- //?History:??
- //************************************??
- Point3f?uv2xyz(Point2f?uvLeft,Point2f?uvRight)??
- {??
- ????//??[u1]??????|X|?????????????????????[u2]??????|X|??
- ????//Z*|v1|?=?Ml*|Y|???????????????????Z*|v2|?=?Mr*|Y|??
- ????//??[?1]??????|Z|?????????????????????[?1]??????|Z|??
- ????//????????????|1|???????????????????????????????|1|??
- ????Mat?mLeftRotation?=?Mat(3,3,CV_32F,leftRotation);??
- ????Mat?mLeftTranslation?=?Mat(3,1,CV_32F,leftTranslation);??
- ????Mat?mLeftRT?=?Mat(3,4,CV_32F);//左相機M矩陣??
- ????hconcat(mLeftRotation,mLeftTranslation,mLeftRT);??
- ????Mat?mLeftIntrinsic?=?Mat(3,3,CV_32F,leftIntrinsic);??
- ????Mat?mLeftM?=?mLeftIntrinsic?*?mLeftRT;??
- ????//cout<<"左相機M矩陣?=?"<<endl<<mLeftM<<endl;??
- ??
- ????Mat?mRightRotation?=?Mat(3,3,CV_32F,rightRotation);??
- ????Mat?mRightTranslation?=?Mat(3,1,CV_32F,rightTranslation);??
- ????Mat?mRightRT?=?Mat(3,4,CV_32F);//右相機M矩陣??
- ????hconcat(mRightRotation,mRightTranslation,mRightRT);??
- ????Mat?mRightIntrinsic?=?Mat(3,3,CV_32F,rightIntrinsic);??
- ????Mat?mRightM?=?mRightIntrinsic?*?mRightRT;??
- ????//cout<<"右相機M矩陣?=?"<<endl<<mRightM<<endl;??
- ??
- ????//最小二乘法A矩陣??
- ????Mat?A?=?Mat(4,3,CV_32F);??
- ????A.at<float>(0,0)?=?uvLeft.x?*?mLeftM.at<float>(2,0)?-?mLeftM.at<float>(0,0);??
- ????A.at<float>(0,1)?=?uvLeft.x?*?mLeftM.at<float>(2,1)?-?mLeftM.at<float>(0,1);??
- ????A.at<float>(0,2)?=?uvLeft.x?*?mLeftM.at<float>(2,2)?-?mLeftM.at<float>(0,2);??
- ??
- ????A.at<float>(1,0)?=?uvLeft.y?*?mLeftM.at<float>(2,0)?-?mLeftM.at<float>(1,0);??
- ????A.at<float>(1,1)?=?uvLeft.y?*?mLeftM.at<float>(2,1)?-?mLeftM.at<float>(1,1);??
- ????A.at<float>(1,2)?=?uvLeft.y?*?mLeftM.at<float>(2,2)?-?mLeftM.at<float>(1,2);??
- ??
- ????A.at<float>(2,0)?=?uvRight.x?*?mRightM.at<float>(2,0)?-?mRightM.at<float>(0,0);??
- ????A.at<float>(2,1)?=?uvRight.x?*?mRightM.at<float>(2,1)?-?mRightM.at<float>(0,1);??
- ????A.at<float>(2,2)?=?uvRight.x?*?mRightM.at<float>(2,2)?-?mRightM.at<float>(0,2);??
- ??
- ????A.at<float>(3,0)?=?uvRight.y?*?mRightM.at<float>(2,0)?-?mRightM.at<float>(1,0);??
- ????A.at<float>(3,1)?=?uvRight.y?*?mRightM.at<float>(2,1)?-?mRightM.at<float>(1,1);??
- ????A.at<float>(3,2)?=?uvRight.y?*?mRightM.at<float>(2,2)?-?mRightM.at<float>(1,2);??
- ??
- ????//最小二乘法B矩陣??
- ????Mat?B?=?Mat(4,1,CV_32F);??
- ????B.at<float>(0,0)?=?mLeftM.at<float>(0,3)?-?uvLeft.x?*?mLeftM.at<float>(2,3);??
- ????B.at<float>(1,0)?=?mLeftM.at<float>(1,3)?-?uvLeft.y?*?mLeftM.at<float>(2,3);??
- ????B.at<float>(2,0)?=?mRightM.at<float>(0,3)?-?uvRight.x?*?mRightM.at<float>(2,3);??
- ????B.at<float>(3,0)?=?mRightM.at<float>(1,3)?-?uvRight.y?*?mRightM.at<float>(2,3);??
- ??
- ????Mat?XYZ?=?Mat(3,1,CV_32F);??
- ????//采用SVD最小二乘法求解XYZ??
- ????solve(A,B,XYZ,DECOMP_SVD);??
- ??
- ????//cout<<"空間坐標為?=?"<<endl<<XYZ<<endl;??
- ??
- ????//世界坐標系中坐標??
- ????Point3f?world;??
- ????world.x?=?XYZ.at<float>(0,0);??
- ????world.y?=?XYZ.at<float>(1,0);??
- ????world.z?=?XYZ.at<float>(2,0);??
- ??
- ????return?world;??
- }??
- ??
- //************************************??
- //?Description:?將世界坐標系中的點投影到左右相機成像坐標系中??
- //?Method:????xyz2uv??
- //?FullName:??xyz2uv??
- //?Access:????public???
- //?Parameter:?Point3f?worldPoint??
- //?Parameter:?float?intrinsic[3][3]??
- //?Parameter:?float?translation[1][3]??
- //?Parameter:?float?rotation[3][3]??
- //?Returns:???cv::Point2f??
- //?Author:????小白??
- //?Date:??????2017/01/10??
- //?History:??
- //************************************??
- Point2f?xyz2uv(Point3f?worldPoint,float?intrinsic[3][3],float?translation[1][3],float?rotation[3][3])??
- {??
- ????//????[fx?s?x0]?????????????????????????[Xc]????????[Xw]????????[u]???1?????[Xc]??
- ????//K?=?|0?fy?y0|???????TEMP?=?[R?T]??????|Yc|?=?TEMP*|Yw|????????|?|?=?—*K?*|Yc|??
- ????//????[?0?0?1?]?????????????????????????[Zc]????????|Zw|????????[v]???Zc????[Zc]??
- ????//??????????????????????????????????????????????????[1?]??
- ????Point3f?c;??
- ????c.x?=?rotation[0][0]*worldPoint.x?+?rotation[0][1]*worldPoint.y?+?rotation[0][2]*worldPoint.z?+?translation[0][0]*1;??
- ????c.y?=?rotation[1][0]*worldPoint.x?+?rotation[1][1]*worldPoint.y?+?rotation[1][2]*worldPoint.z?+?translation[0][1]*1;??
- ????c.z?=?rotation[2][0]*worldPoint.x?+?rotation[2][1]*worldPoint.y?+?rotation[2][2]*worldPoint.z?+?translation[0][2]*1;??
- ??
- ????Point2f?uv;??
- ????uv.x?=?(intrinsic[0][0]*c.x?+?intrinsic[0][1]*c.y?+?intrinsic[0][2]*c.z)/c.z;??
- ????uv.y?=?(intrinsic[1][0]*c.x?+?intrinsic[1][1]*c.y?+?intrinsic[1][2]*c.z)/c.z;??
- ??
- ????return?uv;??
- }??
2017/5/26補充?
matlab或者opencv標定完都是在左相機上建立世界坐標系,于是上面代碼對應的改為:
[cpp]?view plain?copy
- //左相機旋轉矩陣????
- float?leftRotation[3][3]?=?{1,0,0,??0,1,0,??0,0,1?};??
- //左相機平移向量????
- float?leftTranslation[1][3]?=?{0,0,0};??
畸變矩陣(默認獲得5個即便參數k1,k2,p1,p2,k3)
?
?——————————————————————————————————————————————————————————————
?像面坐標系——>世界坐標系還有一種模型是光軸平行模型
雙目立體視覺三位測量是基于視差原理:
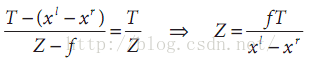
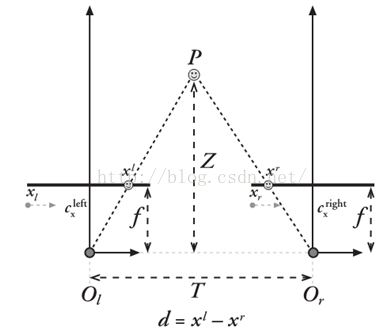

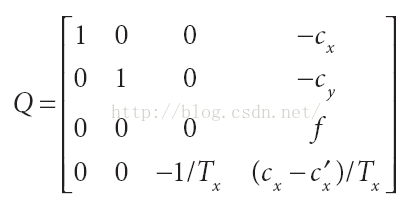
這里,除cx‘外的所有參數都來自于左圖像,cx’是主點在右圖像上的x坐標。如果主光線在無窮遠處相交,那么cx=cx‘,并且右下角的項為0,給定一個二維齊次點和其關聯的視差d,我們可以將此點投影到三維中:
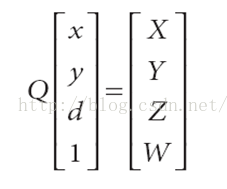
三維坐標就是(X / W , Y / W , Z / W)
?
光軸平行模型要得到視差圖,http://blog.csdn.net/wangchao7281/article/details/52506691?locationNum=7
可以參考opencv的例子,例子的使用方法可以參考http://blog.csdn.net/t247555529/article/details/48046859
得到視差圖后可以調用cvReprojectImageTo3D輸出的三維坐標
看到很多人輸出三維坐標時z出現10000,那個其實是輸出方式不對,應該是下面這樣
[cpp]?view plain?copy
- Point?p;??
- p.x?=294,p.y=189;??
- cout<<p<<?"in?world?coordinate:?"?<<?xyz.at<Vec3f>(p)*16?<<endl;???
為什么要乘以16呢?
因為在OpenCV2.0中,BM函數得出的結果是以16位符號數的形式的存儲的,出于精度需要,所有的視差在輸出時都擴大了16倍(2^4)。其具體代碼表示如下:
[cpp]?view plain?copy
- dptr[y*dstep]?=?(short)(((ndisp?-?mind?-?1?+?mindisp)*256?+?(d?!=?0???(p-n)*128/d?:?0)?+?15)?>>?4);??
?
可以看到,原始視差在左移8位(256)并且加上一個修正值之后又右移了4位,最終的結果就是左移4位
因此,在實際求距離時,cvReprojectTo3D出來的X/W,Y/W,Z/W都要乘以16 (也就是W除以16),才能得到正確的三維坐標信息
下面是在opencv3.0下實現的該方法的測距(轉載)
?
[cpp]?view plain?copy
- /******************************/??
- /*????????立體匹配和測距????????*/??
- /******************************/??
- ??
- #include?<opencv2/opencv.hpp>????
- #include?<iostream>????
- ??
- using?namespace?std;??
- using?namespace?cv;??
- ??
- const?int?imageWidth?=?640;?????????????????????????????//攝像頭的分辨率????
- const?int?imageHeight?=?480;??
- Size?imageSize?=?Size(imageWidth,?imageHeight);??
- ??
- Mat?rgbImageL,?grayImageL;??
- Mat?rgbImageR,?grayImageR;??
- Mat?rectifyImageL,?rectifyImageR;??
- ??
- Rect?validROIL;//圖像校正之后,會對圖像進行裁剪,這里的validROI就是指裁剪之后的區域????
- Rect?validROIR;??
- ??
- Mat?mapLx,?mapLy,?mapRx,?mapRy;?????//映射表????
- Mat?Rl,?Rr,?Pl,?Pr,?Q;??????????????//校正旋轉矩陣R,投影矩陣P?重投影矩陣Q??
- Mat?xyz;??????????????//三維坐標??
- ??
- Point?origin;?????????//鼠標按下的起始點??
- Rect?selection;??????//定義矩形選框??
- bool?selectObject?=?false;????//是否選擇對象??
- ??
- int?blockSize?=?0,?uniquenessRatio?=0,?numDisparities=0;??
- Ptr<StereoBM>?bm?=?StereoBM::create(16,?9);??
- ??
- /*?
- 事先標定好的相機的參數?
- fx?0?cx?
- 0?fy?cy?
- 0?0??1?
- */??
- Mat?cameraMatrixL?=?(Mat_<double>(3,?3)?<<?836.771593170594,0,319.970748854743,??
- ????0,839.416501863912,228.788913693256,??
- ????0,?0,?1);??
- Mat?distCoeffL?=?(Mat_<double>(5,?1)?<<?0,?0,?0,?0,?0);??
- ??
- Mat?cameraMatrixR?=?(Mat_<double>(3,?3)?<<?838.101721655709,0,319.647150557935,??
- ????0,840.636812165056,250.655818405938,??
- ????0,?0,?1);??
- Mat?distCoeffR?=?(Mat_<double>(5,?1)?<<?0,?0,?0,?0,?0);??
- ??
- Mat?T?=?(Mat_<double>(3,?1)?<<?-39.7389449993974,0.0740619639178984,0.411914303245886);//T平移向量??
- Mat?rec?=?(Mat_<double>(3,?1)?<<?-0.00306,?-0.03207,?0.00206);//rec旋轉向量??
- Mat?R?=?(Mat_<double>(3,?3)?<<?0.999957725513956,-0.00103511880221423,0.00913650447492805,??
- ?????????0.00114462826834523,0.999927476064641,-0.0119888463633882,??
- ?????????-0.00912343197938050,0.0119987974423658,0.999886389470751);//R?旋轉矩陣??
- ??
- ??
- /*****立體匹配*****/??
- void?stereo_match(int,void*)??
- {??
- ????bm->setBlockSize(2*blockSize+5);?????//SAD窗口大小,5~21之間為宜??
- ????bm->setROI1(validROIL);??
- ????bm->setROI2(validROIR);??
- ????bm->setPreFilterCap(31);??
- ????bm->setMinDisparity(0);??//最小視差,默認值為0,?可以是負值,int型??
- ????bm->setNumDisparities(numDisparities*16+16);//視差窗口,即最大視差值與最小視差值之差,窗口大小必須是16的整數倍,int型??
- ????bm->setTextureThreshold(10);???
- ????bm->setUniquenessRatio(uniquenessRatio);//uniquenessRatio主要可以防止誤匹配??
- ????bm->setSpeckleWindowSize(100);??
- ????bm->setSpeckleRange(32);??
- ????bm->setDisp12MaxDiff(-1);??
- ????Mat?disp,?disp8;??
- ????bm->compute(rectifyImageL,?rectifyImageR,?disp);//輸入圖像必須為灰度圖??
- ????disp.convertTo(disp8,?CV_8U,?255?/?((numDisparities?*?16?+?16)*16.));//計算出的視差是CV_16S格式??
- ????reprojectImageTo3D(disp,?xyz,?Q,?true);?//在實際求距離時,ReprojectTo3D出來的X?/?W,?Y?/?W,?Z?/?W都要乘以16(也就是W除以16),才能得到正確的三維坐標信息。??
- ????xyz?=?xyz?*?16;??
- ????imshow("disparity",?disp8);??
- }??
- ??
- /*****描述:鼠標操作回調*****/??
- static?void?onMouse(int?event,?int?x,?int?y,?int,?void*)??
- {??
- ????if?(selectObject)??
- ????{??
- ????????selection.x?=?MIN(x,?origin.x);??
- ????????selection.y?=?MIN(y,?origin.y);??
- ????????selection.width?=?std::abs(x?-?origin.x);??
- ????????selection.height?=?std::abs(y?-?origin.y);??
- ????}??
- ??
- ????switch?(event)??
- ????{??
- ????case?EVENT_LBUTTONDOWN:???//鼠標左按鈕按下的事件??
- ????????origin?=?Point(x,?y);??
- ????????selection?=?Rect(x,?y,?0,?0);??
- ????????selectObject?=?true;??
- ????????cout?<<?origin?<<"in?world?coordinate?is:?"?<<?xyz.at<Vec3f>(origin)?<<?endl;??
- ????????break;??
- ????case?EVENT_LBUTTONUP:????//鼠標左按鈕釋放的事件??
- ????????selectObject?=?false;??
- ????????if?(selection.width?>?0?&&?selection.height?>?0)??
- ????????break;??
- ????}??
- }??
- ??
- ??
- /*****主函數*****/??
- int?main()??
- {??
- ????/*?
- ????立體校正?
- ????*/??
- ????//Rodrigues(rec,?R);?//Rodrigues變換??
- ????stereoRectify(cameraMatrixL,?distCoeffL,?cameraMatrixR,?distCoeffR,?imageSize,?R,?T,?Rl,?Rr,?Pl,?Pr,?Q,?CALIB_ZERO_DISPARITY,??
- ????????0,?imageSize,?&validROIL,?&validROIR);??
- ????initUndistortRectifyMap(cameraMatrixL,?distCoeffL,?Rl,?Pr,?imageSize,?CV_32FC1,?mapLx,?mapLy);??
- ????initUndistortRectifyMap(cameraMatrixR,?distCoeffR,?Rr,?Pr,?imageSize,?CV_32FC1,?mapRx,?mapRy);??
- ??
- ????/*?
- ????讀取圖片?
- ????*/??
- ????rgbImageL?=?imread("左2.jpg",?CV_LOAD_IMAGE_COLOR);??
- ????cvtColor(rgbImageL,?grayImageL,?CV_BGR2GRAY);??
- ????rgbImageR?=?imread("右2.jpg",?CV_LOAD_IMAGE_COLOR);??
- ????cvtColor(rgbImageR,?grayImageR,?CV_BGR2GRAY);??
- ??
- ????imshow("ImageL?Before?Rectify",?grayImageL);??
- ????imshow("ImageR?Before?Rectify",?grayImageR);??
- ??
- ????/*?
- ????經過remap之后,左右相機的圖像已經共面并且行對準了?
- ????*/??
- ????remap(grayImageL,?rectifyImageL,?mapLx,?mapLy,?INTER_LINEAR);??
- ????remap(grayImageR,?rectifyImageR,?mapRx,?mapRy,?INTER_LINEAR);??
- ??
- ????/*?
- ????把校正結果顯示出來?
- ????*/??
- ????Mat?rgbRectifyImageL,?rgbRectifyImageR;??
- ????cvtColor(rectifyImageL,?rgbRectifyImageL,?CV_GRAY2BGR);??//偽彩色圖??
- ????cvtColor(rectifyImageR,?rgbRectifyImageR,?CV_GRAY2BGR);??
- ??
- ????//單獨顯示??
- ????//rectangle(rgbRectifyImageL,?validROIL,?Scalar(0,?0,?255),?3,?8);??
- ????//rectangle(rgbRectifyImageR,?validROIR,?Scalar(0,?0,?255),?3,?8);??
- ????imshow("ImageL?After?Rectify",?rgbRectifyImageL);??
- ????imshow("ImageR?After?Rectify",?rgbRectifyImageR);??
- ??
- ????//顯示在同一張圖上??
- ????Mat?canvas;??
- ????double?sf;??
- ????int?w,?h;??
- ????sf?=?600.?/?MAX(imageSize.width,?imageSize.height);??
- ????w?=?cvRound(imageSize.width?*?sf);??
- ????h?=?cvRound(imageSize.height?*?sf);??
- ????canvas.create(h,?w?*?2,?CV_8UC3);???//注意通道??
- ??
- ????//左圖像畫到畫布上??
- ????Mat?canvasPart?=?canvas(Rect(w?*?0,?0,?w,?h));????????????????????????????????//得到畫布的一部分????
- ????resize(rgbRectifyImageL,?canvasPart,?canvasPart.size(),?0,?0,?INTER_AREA);?????//把圖像縮放到跟canvasPart一樣大小????
- ????Rect?vroiL(cvRound(validROIL.x*sf),?cvRound(validROIL.y*sf),????????????????//獲得被截取的區域??????
- ????????cvRound(validROIL.width*sf),?cvRound(validROIL.height*sf));??
- ????//rectangle(canvasPart,?vroiL,?Scalar(0,?0,?255),?3,?8);??????????????????????//畫上一個矩形????
- ????cout?<<?"Painted?ImageL"?<<?endl;??
- ??
- ????//右圖像畫到畫布上??
- ????canvasPart?=?canvas(Rect(w,?0,?w,?h));??????????????????????????????????????//獲得畫布的另一部分????
- ????resize(rgbRectifyImageR,?canvasPart,?canvasPart.size(),?0,?0,?INTER_LINEAR);??
- ????Rect?vroiR(cvRound(validROIR.x?*?sf),?cvRound(validROIR.y*sf),??
- ????????cvRound(validROIR.width?*?sf),?cvRound(validROIR.height?*?sf));??
- ????//rectangle(canvasPart,?vroiR,?Scalar(0,?0,?255),?3,?8);??
- ????cout?<<?"Painted?ImageR"?<<?endl;??
- ??
- ????//畫上對應的線條??
- ????for?(int?i?=?0;?i?<?canvas.rows;?i?+=?16)??
- ????????line(canvas,?Point(0,?i),?Point(canvas.cols,?i),?Scalar(0,?255,?0),?1,?8);??
- ????imshow("rectified",?canvas);??
- ??
- ????/*?
- ????立體匹配?
- ????*/??
- ????namedWindow("disparity",?CV_WINDOW_AUTOSIZE);??
- ????//?創建SAD窗口?Trackbar??
- ????createTrackbar("BlockSize:\n",?"disparity",&blockSize,?8,?stereo_match);??
- ????//?創建視差唯一性百分比窗口?Trackbar??
- ????createTrackbar("UniquenessRatio:\n",?"disparity",?&uniquenessRatio,?50,?stereo_match);??
- ????//?創建視差窗口?Trackbar??
- ????createTrackbar("NumDisparities:\n",?"disparity",?&numDisparities,?16,?stereo_match);??
- ????//鼠標響應函數setMouseCallback(窗口名稱,?鼠標回調函數,?傳給回調函數的參數,一般取0)??
- ????setMouseCallback("disparity",?onMouse,?0);??
- ????stereo_match(0,0);??
- ??
- ????waitKey(0);??
- ????return?0;??
- }??
?
?
?
————————————————————————————————————————
最后是完整的大作業代碼,感覺自己寫的并不是很好,敷衍了事~~
運行該程序,會對素材文件夾中圖像進行處理,生成三個文件夾,分別是“大球圓心”、“畸變校正”、“亮度對比度”以及一個csv文件,文件名為“三維坐標.csv”,里面記錄了計算得到的左右相機中球的像面坐標和解算出的空間坐標。該程序默認對所有計算出的圓心坐標進行了重新賦值,如需修改圓心坐標,需在工程中的initPos()修改賦值語句,如需程序自動計算,在主函數中注釋該指令即可,但是自動計算的圓心并不準確。
?
[cpp]?view plain?copy
- //opencv2.4.9?vs2012??
- #include?<opencv2\opencv.hpp>??
- #include?<fstream>??
- #include?<iostream>??
- ??
- using?namespace?std;??
- using?namespace?cv;??
- ??
- //圖片對數量??
- #define??PicNum??14??
- ??
- //左相機內參數矩陣??
- float?leftIntrinsic[3][3]?=?{4037.82450,?????????????0,?????947.65449,??
- ??????????????????????????????????????0,????3969.79038,?????455.48718,??
- ??????????????????????????????????????0,?????????????0,?????????????1};??
- //左相機畸變系數??
- float?leftDistortion[1][5]?=?{0.18962,?-4.05566,?-0.00510,?0.02895,?0};??
- //左相機旋轉矩陣??
- float?leftRotation[3][3]?=?{0.912333,???????-0.211508,???????0.350590,???
- ????????????????????????????0.023249,???????-0.828105,??????-0.560091,???
- ????????????????????????????0.408789,????????0.519140,??????-0.750590};??
- //左相機平移向量??
- float?leftTranslation[1][3]?=?{-127.199992,?28.190639,?1471.356768};??
- ??
- //右相機內參數矩陣??
- float?rightIntrinsic[3][3]?=?{3765.83307,????????????0,?????339.31958,??
- ????????????????????????????????????????0,??3808.08469,?????660.05543,??
- ????????????????????????????????????????0,???????????0,?????????????1};??
- //右相機畸變系數??
- float?rightDistortion[1][5]?=?{-0.24195,?5.97763,?-0.02057,?-0.01429,?0};??
- //右相機旋轉矩陣??
- float?rightRotation[3][3]?=?{-0.134947,??????0.989568,??????-0.050442,???
- ??????????????????????????????0.752355,??????0.069205,??????-0.655113,???
- ?????????????????????????????-0.644788,?????-0.126356,??????-0.753845};??
- //右相機平移向量??
- float?rightTranslation[1][3]?=?{50.877397,?-99.796492,?1507.312197};??
- ??
- //球坐標數組??
- //大球??
- float?rightDaqiu[PicNum][2]?=?{0};??
- float?leftDaqiu[PicNum][2]?=?{0};??
- float?worldDaqiu[PicNum][3]?=?{0};??
- //小球??
- float?rightXiaoqiu[PicNum][2]?=?{0};??
- float?leftXiaoqiu[PicNum][2]?=?{0};??
- float?worldXiaoqiu[PicNum][3]?=?{0};??
- //花球??
- float?rightHuaqiu[PicNum][2]?=?{0};??
- float?leftHuaqiu[PicNum][2]?=?{0};??
- float?worldHuaqiu[PicNum][3]?=?{0};??
- ??
- void?ContrastAndBright(double?alpha,?double?beta);//調節亮度/對比度??
- void?CorrectionProcess();//對素材校正畸變??
- void?initPos();//手動賦值球的圖像坐標??
- void?Daqiu();//計算大球圖像坐標??
- Mat?PictureCorrection(?Mat?image?,float?intrinsic[3][3],float?distortion[1][5]);//單張圖像畸變校正??
- Point2f?xyz2uv(Point3f?worldPoint,float?intrinsic[3][3],float?translation[1][3],float?rotation[3][3]);//從世界坐標轉為圖像坐標??
- Point3f?uv2xyz(Point2f?uvLeft,Point2f?uvRight);//從圖像坐標轉為世界坐標??
- ??
- int?main()??
- {??
- ????CorrectionProcess();//對素材校正畸變??
- ????ContrastAndBright(2.5,50);//調節亮度/對比度??
- ??????
- ????Daqiu();//自動計算大球坐標??
- ??????
- ????initPos();//手動修正,如需驗證數據,可以在該函數中修改??
- ??
- ????//求取大球的空間坐標??
- ????cout<<"求解大球的世界坐標:"<<endl;??
- ????for?(int?i=0;?i<PicNum;?i++)??
- ????{??
- ????????Point2f?l,r;??
- ????????Point3f?worldPoint;??
- ??
- ????????l.x?=?leftDaqiu[i][0];??
- ????????l.y?=?leftDaqiu[i][1];??
- ????????r.x?=?rightDaqiu[i][0];??
- ????????r.y?=?rightDaqiu[i][1];??
- ??
- ????????worldPoint?=?uv2xyz(l,r);??
- ????????cout<<?worldPoint?<<endl;??
- ????????worldDaqiu[i][0]?=?worldPoint.x;??
- ????????worldDaqiu[i][1]?=?worldPoint.y;??
- ????????worldDaqiu[i][2]?=?worldPoint.z;??
- ????}??
- ??
- ????cout<<"求解小球的世界坐標:"<<endl;??
- ????for?(int?i=0;?i<PicNum;?i++)??
- ????{??
- ????????Point2f?l,r;??
- ????????Point3f?worldPoint;??
- ??
- ????????l.x?=?leftXiaoqiu[i][0];??
- ????????l.y?=?leftXiaoqiu[i][1];??
- ????????r.x?=?rightXiaoqiu[i][0];??
- ????????r.y?=?rightXiaoqiu[i][1];??
- ??
- ????????worldPoint?=?uv2xyz(l,r);??
- ????????cout<<?worldPoint?<<endl;??
- ????????worldXiaoqiu[i][0]?=?worldPoint.x;??
- ????????worldXiaoqiu[i][1]?=?worldPoint.y;??
- ????????worldXiaoqiu[i][2]?=?worldPoint.z;??
- ????}??
- ??
- ????cout<<"求解花球的世界坐標:"<<endl;??
- ????for?(int?i=0;?i<PicNum;?i++)??
- ????{??
- ????????Point2f?l,r;??
- ????????Point3f?worldPoint;??
- ??
- ????????l.x?=?leftHuaqiu[i][0];??
- ????????l.y?=?leftHuaqiu[i][1];??
- ????????r.x?=?rightHuaqiu[i][0];??
- ????????r.y?=?rightHuaqiu[i][1];??
- ??
- ????????worldPoint?=?uv2xyz(l,r);??
- ????????cout<<?worldPoint?<<endl;??
- ????????worldHuaqiu[i][0]?=?worldPoint.x;??
- ????????worldHuaqiu[i][1]?=?worldPoint.y;??
- ????????worldHuaqiu[i][2]?=?worldPoint.z;??
- ????}??
- ??
- ????//csv文件寫入部分??
- ????ofstream?oFile;??//定義文件輸出流?????
- ??
- ????oFile.open("三維坐標.csv",?ios::out?|?ios::trunc);????//打開要輸出的文件?????這樣就很容易的輸出一個需要的excel?文件????
- ????//寫入大球數據??
- ????oFile?<<?"大球坐標"?<<?endl;??
- ????oFile?<<?"左相機坐標,,,右相機坐標,,,世界坐標"?<<?endl;??
- ????oFile?<<?"x,y,,x,y,,x,y,z"?<<?endl;??
- ????for?(int?i=0;?i<PicNum?;i++)??
- ????{??
- ????????oFile?<<?leftDaqiu[i][0]?<<","<<?leftDaqiu[i][1]?<<?",,"?<<?rightDaqiu[i][0]?<<","<<?rightDaqiu[i][1]???
- ??????????????<<?",,"?<<?worldDaqiu[i][0]?<<","<<??worldDaqiu[i][1]?<<","<<??worldDaqiu[i][2]?<<?endl;??
- ????}??
- ??
- ????//寫入小球數據??
- ????oFile?<<?"小球坐標"?<<?endl;??
- ????oFile?<<?"左相機坐標,,,右相機坐標,,,世界坐標"?<<?endl;??
- ????oFile?<<?"x,y,,x,y,,x,y,z"?<<?endl;??
- ????for?(int?i=0;?i<PicNum?;i++)??
- ????{??
- ????????oFile?<<?leftXiaoqiu[i][0]?<<","<<?leftXiaoqiu[i][1]?<<?",,"?<<?rightXiaoqiu[i][0]?<<","<<?rightXiaoqiu[i][1]???
- ????????<<?",,"?<<?worldXiaoqiu[i][0]?<<","<<??worldXiaoqiu[i][1]?<<","<<??worldXiaoqiu[i][2]?<<?endl;??
- ????}??
- ??????
- ??
- ????//寫入花球數據??
- ????oFile?<<?"花球坐標"?<<?endl;??
- ????oFile?<<?"左相機坐標,,,右相機坐標,,,世界坐標"?<<?endl;??
- ????oFile?<<?"x,y,,x,y,,x,y,z"?<<?endl;??
- ????for?(int?i=0;?i<PicNum?;i++)??
- ????{??
- ????????oFile?<<?leftHuaqiu[i][0]?<<","<<?leftHuaqiu[i][1]?<<?",,"?<<?rightHuaqiu[i][0]?<<","<<?rightHuaqiu[i][1]???
- ????????<<?",,"?<<?worldHuaqiu[i][0]?<<","<<??worldHuaqiu[i][1]?<<","<<??worldHuaqiu[i][2]?<<?endl;??
- ????}??
- ??
- ????//關閉文件??
- ????oFile.close();????
- ??????
- ??
- ????//test??
- ????已知空間坐標求成像坐標??
- ????//Point3f?point(700,220,530);??
- ????//cout<<"左相機中坐標:"<<endl;??
- ????//cout<<xyz2uv(point,leftIntrinsic,leftTranslation,leftRotation)<<endl;??
- ????//cout<<"右相機中坐標:"<<endl;??
- ????//cout<<xyz2uv(point,rightIntrinsic,rightTranslation,rightRotation)<<endl;??
- ??
- ????//已知左右相機成像坐標求空間坐標??
- ????//Point2f?l?=?xyz2uv(point,leftIntrinsic,leftTranslation,leftRotation);??
- ????//Point2f?r?=?xyz2uv(point,rightIntrinsic,rightTranslation,rightRotation);??
- ????//Point3f?worldPoint;??
- ????//worldPoint?=?uv2xyz(l,r);??
- ????//cout<<"空間坐標為:"<<endl<<uv2xyz(l,r)<<endl;??
- ??
- ??
- ????/*?
- ????//csv文件讀取部分?
- ?
- ????string?value;//臨時字符串?
- ????ifstream?iFile("三維坐標.csv");//打開要讀入的文件?
- ????//循環行讀取?
- ????while?(iFile.good())?
- ????{?
- ????????getline(iFile,value);?
- ????????//getline(iFile,value,',');?//.csv文件用","作為分隔符?
- ????????cout<<value<<endl;?
- ????}?
- ????*/??
- ??????
- ????system("pause");??
- ??
- ????return?0;??
- }??
- ??
- //************************************??
- //?Description:?修正圓心坐標??
- //?Method:????initPos??
- //?FullName:??initPos??
- //?Access:????public???
- //?Returns:???void??
- //?Author:????bhy??
- //?Date:??????2016/12/25??
- //?History:??
- //************************************??
- void?initPos()??
- {??
- ????//手動修正??
- ????leftDaqiu[0][0]?=?1175;??leftDaqiu[0][1]?=?7;?????rightDaqiu[0][0]?=?256;??rightDaqiu[0][1]?=?1;??
- ????leftDaqiu[1][0]?=?823;???leftDaqiu[1][1]?=?603;???rightDaqiu[1][0]?=?289;??rightDaqiu[1][1]?=?431;??
- ????leftDaqiu[2][0]?=?963;???leftDaqiu[2][1]?=?360;???rightDaqiu[2][0]?=?283;??rightDaqiu[2][1]?=?169;??
- ????leftDaqiu[3][0]?=?1065;??leftDaqiu[3][1]?=?180;???rightDaqiu[3][0]?=?294;??rightDaqiu[3][1]?=?1;??
- ????leftDaqiu[4][0]?=?1039;??leftDaqiu[4][1]?=?217;???rightDaqiu[4][0]?=?314;??rightDaqiu[4][1]?=?68;??
- ????leftDaqiu[5][0]?=?896;???leftDaqiu[5][1]?=?448;???rightDaqiu[5][0]?=?378;??rightDaqiu[5][1]?=?402;??
- ????leftDaqiu[6][0]?=?933;???leftDaqiu[6][1]?=?376;???rightDaqiu[6][0]?=?398;??rightDaqiu[6][1]?=?347;??
- ????leftDaqiu[7][0]?=?868;???leftDaqiu[7][1]?=?463;???rightDaqiu[7][0]?=?423;??rightDaqiu[7][1]?=?418;??
- ????leftDaqiu[8][0]?=?878;???leftDaqiu[8][1]?=?417;???rightDaqiu[8][0]?=?458;??rightDaqiu[8][1]?=?466;??
- ????leftDaqiu[9][0]?=?860;???leftDaqiu[9][1]?=?423;???rightDaqiu[9][0]?=?481;??rightDaqiu[9][1]?=?490;??
- ????leftDaqiu[10][0]?=?840;??leftDaqiu[10][1]?=?442;??rightDaqiu[10][0]?=?499;?rightDaqiu[10][1]?=?500;??
- ????leftDaqiu[11][0]?=?822;??leftDaqiu[11][1]?=?414;??rightDaqiu[11][0]?=?523;?rightDaqiu[11][1]?=?511;??
- ????leftDaqiu[12][0]?=?805;??leftDaqiu[12][1]?=?406;??rightDaqiu[12][0]?=?538;?rightDaqiu[12][1]?=?516;??
- ????leftDaqiu[13][0]?=?802;??leftDaqiu[13][1]?=?402;??rightDaqiu[13][0]?=?549;?rightDaqiu[13][1]?=?514;??
- ??
- ????leftXiaoqiu[0][0]?=?1250;???leftXiaoqiu[0][1]?=?120;???rightXiaoqiu[0][0]?=?308;??rightXiaoqiu[0][1]?=?313;??
- ????leftXiaoqiu[1][0]?=?1034;???leftXiaoqiu[1][1]?=?481;???rightXiaoqiu[1][0]?=?314;??rightXiaoqiu[1][1]?=?482;??
- ????leftXiaoqiu[2][0]?=?1207;???leftXiaoqiu[2][1]?=?228;???rightXiaoqiu[2][0]?=?284;??rightXiaoqiu[2][1]?=?186;??
- ????leftXiaoqiu[3][0]?=?1343;???leftXiaoqiu[3][1]?=?55;????rightXiaoqiu[3][0]?=?252;??rightXiaoqiu[3][1]?=?-20;??
- ????leftXiaoqiu[4][0]?=?1326;???leftXiaoqiu[4][1]?=?102;???rightXiaoqiu[4][0]?=?242;??rightXiaoqiu[4][1]?=?23;??
- ????leftXiaoqiu[5][0]?=?1021;???leftXiaoqiu[5][1]?=?625;???rightXiaoqiu[5][0]?=?269;??rightXiaoqiu[5][1]?=?632;??
- ????leftXiaoqiu[6][0]?=?1123;???leftXiaoqiu[6][1]?=?489;???rightXiaoqiu[6][0]?=?241;??rightXiaoqiu[6][1]?=?458;??
- ????leftXiaoqiu[7][0]?=?1147;???leftXiaoqiu[7][1]?=?475;???rightXiaoqiu[7][0]?=?224;??rightXiaoqiu[7][1]?=?404;??
- ????leftXiaoqiu[8][0]?=?1078;???leftXiaoqiu[8][1]?=?595;???rightXiaoqiu[8][0]?=?223;??rightXiaoqiu[8][1]?=?558;??
- ????leftXiaoqiu[9][0]?=?1062;???leftXiaoqiu[9][1]?=?635;???rightXiaoqiu[9][0]?=?216;??rightXiaoqiu[9][1]?=?598;??
- ????leftXiaoqiu[10][0]?=?1080;??leftXiaoqiu[10][1]?=?619;??rightXiaoqiu[10][0]?=?201;?rightXiaoqiu[10][1]?=?576;??
- ????leftXiaoqiu[11][0]?=?1054;??leftXiaoqiu[11][1]?=?690;??rightXiaoqiu[11][0]?=?189;?rightXiaoqiu[11][1]?=?633;??
- ????leftXiaoqiu[12][0]?=?1046;??leftXiaoqiu[12][1]?=?724;??rightXiaoqiu[12][0]?=?179;?rightXiaoqiu[12][1]?=?655;??
- ????leftXiaoqiu[13][0]?=?1046;??leftXiaoqiu[13][1]?=?726;??rightXiaoqiu[13][0]?=?172;?rightXiaoqiu[13][1]?=?656;??
- ??????
- ????leftHuaqiu[0][0]?=?1075;??leftHuaqiu[0][1]?=?111;???rightHuaqiu[0][0]?=?120;??rightHuaqiu[0][1]?=?-30;//出視場??
- ????leftHuaqiu[1][0]?=?708;???leftHuaqiu[1][1]?=?810;???rightHuaqiu[1][0]?=?142;??rightHuaqiu[1][1]?=?382;??
- ????leftHuaqiu[2][0]?=?876;???leftHuaqiu[2][1]?=?518;???rightHuaqiu[2][0]?=?131;??rightHuaqiu[2][1]?=?83;??
- ????leftHuaqiu[3][0]?=?1021;??leftHuaqiu[3][1]?=?253;???rightHuaqiu[3][0]?=?180;???rightHuaqiu[3][1]?=?-60;//出視場??
- ????leftHuaqiu[4][0]?=?1019;??leftHuaqiu[4][1]?=?248;???rightHuaqiu[4][0]?=?183;???rightHuaqiu[4][1]?=?-30;//出視場??
- ????leftHuaqiu[5][0]?=?764;???leftHuaqiu[5][1]?=?654;???rightHuaqiu[5][0]?=?278;??rightHuaqiu[5][1]?=?437;??
- ????leftHuaqiu[6][0]?=?844;???leftHuaqiu[6][1]?=?486;???rightHuaqiu[6][0]?=?286;??rightHuaqiu[6][1]?=?261;??
- ????leftHuaqiu[7][0]?=?852;???leftHuaqiu[7][1]?=?425;???rightHuaqiu[7][0]?=?305;??rightHuaqiu[7][1]?=?206;??
- ????leftHuaqiu[8][0]?=?780;???leftHuaqiu[8][1]?=?523;???rightHuaqiu[8][0]?=?347;??rightHuaqiu[8][1]?=?359;??
- ????leftHuaqiu[9][0]?=?757;???leftHuaqiu[9][1]?=?530;???rightHuaqiu[9][0]?=?363;??rightHuaqiu[9][1]?=?382;??
- ????leftHuaqiu[10][0]?=?765;??leftHuaqiu[10][1]?=?505;??rightHuaqiu[10][0]?=?368;?rightHuaqiu[10][1]?=?345;??
- ????leftHuaqiu[11][0]?=?702;??leftHuaqiu[11][1]?=?554;??rightHuaqiu[11][0]?=?382;?rightHuaqiu[11][1]?=?398;??
- ????leftHuaqiu[12][0]?=?666;??leftHuaqiu[12][1]?=?573;??rightHuaqiu[12][0]?=?386;?rightHuaqiu[12][1]?=?408;??
- ????leftHuaqiu[13][0]?=?656;??leftHuaqiu[13][1]?=?581;??rightHuaqiu[13][0]?=?384;?rightHuaqiu[13][1]?=?398;??
- }??
- ??
- //************************************??
- //?2016/12/2??by?小白??
- //?Method:????uv2xyz??
- //?FullName:??uv2xyz??
- //?Access:????public???
- //?Returns:???cv::Point3f???????世界坐標??
- //?Qualifier:?根據左右相機中成像坐標求解空間坐標??
- //?Parameter:?Point2f?uvLeft????????左相機中成像坐標??
- //?Parameter:?Point2f?uvRight???????右相機中成像坐標??
- //************************************??
- Point3f?uv2xyz(Point2f?uvLeft,Point2f?uvRight)??
- {??
- ????//??[u1]??????|X|?????????????????????[u2]??????|X|??
- ????//Z*|v1|?=?Ml*|Y|???????????????????Z*|v2|?=?Mr*|Y|??
- ????//??[?1]??????|Z|?????????????????????[?1]??????|Z|??
- ????//????????????|1|???????????????????????????????|1|??
- ????Mat?mLeftRotation?=?Mat(3,3,CV_32F,leftRotation);??
- ????Mat?mLeftTranslation?=?Mat(3,1,CV_32F,leftTranslation);??
- ????Mat?mLeftRT?=?Mat(3,4,CV_32F);//左相機M矩陣??
- ????hconcat(mLeftRotation,mLeftTranslation,mLeftRT);??
- ????Mat?mLeftIntrinsic?=?Mat(3,3,CV_32F,leftIntrinsic);??
- ????Mat?mLeftM?=?mLeftIntrinsic?*?mLeftRT;??
- ????//cout<<"左相機M矩陣?=?"<<endl<<mLeftM<<endl;??
- ??
- ????Mat?mRightRotation?=?Mat(3,3,CV_32F,rightRotation);??
- ????Mat?mRightTranslation?=?Mat(3,1,CV_32F,rightTranslation);??
- ????Mat?mRightRT?=?Mat(3,4,CV_32F);//右相機M矩陣??
- ????hconcat(mRightRotation,mRightTranslation,mRightRT);??
- ????Mat?mRightIntrinsic?=?Mat(3,3,CV_32F,rightIntrinsic);??
- ????Mat?mRightM?=?mRightIntrinsic?*?mRightRT;??
- ????//cout<<"右相機M矩陣?=?"<<endl<<mRightM<<endl;??
- ??
- ????//最小二乘法A矩陣??
- ????Mat?A?=?Mat(4,3,CV_32F);??
- ????A.at<float>(0,0)?=?uvLeft.x?*?mLeftM.at<float>(2,0)?-?mLeftM.at<float>(0,0);??
- ????A.at<float>(0,1)?=?uvLeft.x?*?mLeftM.at<float>(2,1)?-?mLeftM.at<float>(0,1);??
- ????A.at<float>(0,2)?=?uvLeft.x?*?mLeftM.at<float>(2,2)?-?mLeftM.at<float>(0,2);??
- ??
- ????A.at<float>(1,0)?=?uvLeft.y?*?mLeftM.at<float>(2,0)?-?mLeftM.at<float>(1,0);??
- ????A.at<float>(1,1)?=?uvLeft.y?*?mLeftM.at<float>(2,1)?-?mLeftM.at<float>(1,1);??
- ????A.at<float>(1,2)?=?uvLeft.y?*?mLeftM.at<float>(2,2)?-?mLeftM.at<float>(1,2);??
- ??
- ????A.at<float>(2,0)?=?uvRight.x?*?mRightM.at<float>(2,0)?-?mRightM.at<float>(0,0);??
- ????A.at<float>(2,1)?=?uvRight.x?*?mRightM.at<float>(2,1)?-?mRightM.at<float>(0,1);??
- ????A.at<float>(2,2)?=?uvRight.x?*?mRightM.at<float>(2,2)?-?mRightM.at<float>(0,2);??
- ??
- ????A.at<float>(3,0)?=?uvRight.y?*?mRightM.at<float>(2,0)?-?mRightM.at<float>(1,0);??
- ????A.at<float>(3,1)?=?uvRight.y?*?mRightM.at<float>(2,1)?-?mRightM.at<float>(1,1);??
- ????A.at<float>(3,2)?=?uvRight.y?*?mRightM.at<float>(2,2)?-?mRightM.at<float>(1,2);??
- ??
- ????//最小二乘法B矩陣??
- ????Mat?B?=?Mat(4,1,CV_32F);??
- ????B.at<float>(0,0)?=?mLeftM.at<float>(0,3)?-?uvLeft.x?*?mLeftM.at<float>(2,3);??
- ????B.at<float>(1,0)?=?mLeftM.at<float>(1,3)?-?uvLeft.y?*?mLeftM.at<float>(2,3);??
- ????B.at<float>(2,0)?=?mRightM.at<float>(0,3)?-?uvRight.x?*?mRightM.at<float>(2,3);??
- ????B.at<float>(3,0)?=?mRightM.at<float>(1,3)?-?uvRight.y?*?mRightM.at<float>(2,3);??
- ??
- ????Mat?XYZ?=?Mat(3,1,CV_32F);??
- ????//采用SVD最小二乘法求解XYZ??
- ????solve(A,B,XYZ,DECOMP_SVD);??
- ??
- ????//cout<<"空間坐標為?=?"<<endl<<XYZ<<endl;??
- ??
- ????//世界坐標系中坐標??
- ????Point3f?world;??
- ????world.x?=?XYZ.at<float>(0,0);??
- ????world.y?=?XYZ.at<float>(1,0);??
- ????world.z?=?XYZ.at<float>(2,0);??
- ??
- ????return?world;??
- }??
- ??
- //************************************??
- //?Description:?將空間坐標轉換為像面坐標,用于檢驗??
- //?Method:????xyz2uv??
- //?FullName:??xyz2uv??
- //?Access:????public???
- //?Parameter:?Point3f?worldPoint??
- //?Parameter:?float?intrinsic[3][3]??
- //?Parameter:?float?translation[1][3]??
- //?Parameter:?float?rotation[3][3]??
- //?Returns:???cv::Point2f??
- //?Author:????bhy??
- //?Date:??????2016/12/28??
- //?History:??
- //************************************??
- Point2f?xyz2uv(Point3f?worldPoint,float?intrinsic[3][3],float?translation[1][3],float?rotation[3][3])??
- {??
- ????//????[fx?s?x0]?????????????????????????[Xc]????????[Xw]????????[u]???1?????[Xc]??
- ????//K?=?|0?fy?y0|???????TEMP?=?[R?T]??????|Yc|?=?TEMP*|Yw|????????|?|?=?—*K?*|Yc|??
- ????//????[?0?0?1?]?????????????????????????[Zc]????????|Zw|????????[v]???Zc????[Zc]??
- ????//??????????????????????????????????????????????????[1?]??
- ????Point3f?c;??
- ????c.x?=?rotation[0][0]*worldPoint.x?+?rotation[0][1]*worldPoint.y?+?rotation[0][2]*worldPoint.z?+?translation[0][0]*1;??
- ????c.y?=?rotation[1][0]*worldPoint.x?+?rotation[1][1]*worldPoint.y?+?rotation[1][2]*worldPoint.z?+?translation[0][1]*1;??
- ????c.z?=?rotation[2][0]*worldPoint.x?+?rotation[2][1]*worldPoint.y?+?rotation[2][2]*worldPoint.z?+?translation[0][2]*1;??
- ??
- ????Point2f?uv;??
- ????uv.x?=?(intrinsic[0][0]*c.x?+?intrinsic[0][1]*c.y?+?intrinsic[0][2]*c.z)/c.z?+?0.5;//加0.5去整?==?四舍五入??
- ????uv.y?=?(intrinsic[1][0]*c.x?+?intrinsic[1][1]*c.y?+?intrinsic[1][2]*c.z)/c.z?+?0.5;//加0.5去整?==?四舍五入??
- ??
- ????return?uv;??
- }??
- ??
- ??
- //************************************??
- //?Description:?對畸變校正文件夾下的圖片批量進行亮度/對比度調節??
- //?Method:????ContrastAndBright??
- //?FullName:??ContrastAndBright??
- //?Access:????public???
- //?Parameter:?double?alpha??
- //?Parameter:?double?beta??
- //?Returns:???void??
- //?Author:????bhy??
- //?Date:??????2016/12/28??
- //?History:??
- //************************************??
- void?ContrastAndBright(double?alpha,?double?beta)??
- {??
- ????//double?alpha?=3;????
- ????//double?beta?=?40;???
- ????cout<<"**********************************************"<<endl;??
- ????cout<<"?????????????????亮度/對比度調節??????????????"<<endl;??
- ????cout<<"**********************************************"<<endl;??
- ??
- ????cout<<"當前?alpha?=?"<<alpha<<endl;??
- ????cout<<"當前?beta?=?"<<beta<<endl;??
- ??
- ????Mat?src,dst;???
- ??
- ????system("md?亮度對比度\\rightky1");??
- ??
- ????//右相機調節??
- ????//如果校正圖像目錄不存在,則創建該目錄??
- ??
- ????for?(int?ii=1;?ii<=PicNum;?ii++)??
- ????{??
- ????????cout<<"右:第"<<ii<<"張圖片"<<endl;??
- ??
- ????????char*?filename?=?new?char[100];??
- ????????sprintf(filename,"畸變校正/rightky1/r%d.bmp",ii);??
- ????????src?=?imread(filename);//順次讀入圖片??
- ????????delete?[]filename;//釋放字符串??
- ??????????
- ????????dst?=?Mat::zeros(src.size(),src.type());//清空目標矩陣??
- ????????//根據alpha,beta重新計算灰度值??
- ????????for?(int?i?=?0;i<src.rows;++i)????
- ????????????for(int?j=?0;j<src.cols;++j)????
- ????????????????for(int?k?=?0;k<3;++k)????
- ????????????????????dst.at<Vec3b>(i,j)[k]?=?saturate_cast<uchar>(src.at<Vec3b>(i,j)[k]*alpha+beta);????
- ??
- ????????char*?output?=?new?char[100];??
- ????????sprintf(output,"亮度對比度/rightky1/r%d.bmp",ii);??
- ????????imwrite(output,dst);?//順次保存校正圖??
- ????????delete?[]output;//釋放字符串??
- ????}??
- ??
- ????//左相機調節??
- ????//如果校正圖像目錄不存在,則創建該目錄??
- ????system("md?亮度對比度\\leftky1");??
- ??
- ????for?(int?ii=1;?ii<=PicNum;?ii++)??
- ????{??
- ????????cout<<"左:第"<<ii<<"張圖片"<<endl;??
- ??
- ????????char*?filename?=?new?char[100];??
- ????????sprintf(filename,"畸變校正/leftky1/l%d.bmp",ii);??
- ????????src?=?imread(filename);//順次讀入圖片??
- ????????delete?[]filename;//釋放字符串??
- ??
- ????????dst?=?Mat::zeros(src.size(),src.type());//清空目標矩陣??
- ????????//根據alpha,beta重新計算灰度值??
- ????????for?(int?i?=?0;i<src.rows;++i)????
- ????????????for(int?j=?0;j<src.cols;++j)????
- ????????????????for(int?k?=?0;k<3;++k)????
- ????????????????????dst.at<Vec3b>(i,j)[k]?=?saturate_cast<uchar>(src.at<Vec3b>(i,j)[k]*alpha+beta);????
- ??
- ????????char*?output?=?new?char[100];??
- ????????sprintf(output,"亮度對比度/leftky1/l%d.bmp",ii);??
- ????????imwrite(output,dst);?//順次保存校正圖??
- ????????delete?[]output;//釋放字符串??
- ????}??
- ??
- ????cout<<"**********************************************"<<endl;??
- ????cout<<"?????????????亮度/對比度調節結束??????????????"<<endl;??
- ????cout<<"**********************************************"<<endl;??
- }??
- ??
- //************************************??
- //?Description:?對素材文件夾中的圖片批量進行畸變校正??
- //?Method:????CorrectionProcess??
- //?FullName:??CorrectionProcess??
- //?Access:????public???
- //?Returns:???void??
- //?Author:????bhy??
- //?Date:??????2016/12/28??
- //?History:??
- //************************************??
- void?CorrectionProcess()??
- {??
- ????cout<<"**********************************************"<<endl;??
- ????cout<<"????????????????????畸變校正??????????????????"<<endl;??
- ????cout<<"**********************************************"<<endl;??
- ??
- ????Mat?image;??
- ??
- ????//使用畸變系數與內參校正右相機原圖??
- ????//如果校正圖像目錄不存在,則創建該目錄??
- ????system("md?畸變校正\\rightky1");??
- ??
- ????for?(int?i=1;?i<=PicNum;?i++)??
- ????{??
- ????????cout<<"右:校正第"<<i<<"張圖片"<<endl;??
- ??
- ????????char*?filename?=?new?char[100];??
- ????????sprintf(filename,"素材/rightky1/r%d.bmp",i);??
- ????????image?=?imread(filename,IMREAD_GRAYSCALE);//順次讀入圖片??
- ????????delete?[]filename;//釋放字符串??
- ??
- ????????char*?output?=?new?char[100];??
- ????????sprintf(output,"畸變校正/rightky1/r%d.bmp",i);??
- ????????imwrite(output,PictureCorrection(image,rightIntrinsic,rightDistortion));?//順次保存校正圖??
- ????????delete?[]output;//釋放字符串??
- ????}??
- ??
- ????//使用畸變系數與內參校正左相機原圖??
- ????//如果校正圖像目錄不存在,則創建該目錄??
- ????system("md?畸變校正\\leftky1");??
- ??
- ????for?(int?i=1;?i<=PicNum;?i++)??
- ????{??
- ????????cout<<"左:校正第"<<i<<"張圖片"<<endl;??
- ??
- ????????char*?filename?=?new?char[100];??
- ????????sprintf(filename,"素材/leftky1/l%d.bmp",i);??
- ????????image?=?imread(filename,IMREAD_GRAYSCALE);//順次讀入圖片??
- ????????delete?[]filename;//釋放字符串??
- ??
- ????????char*?output?=?new?char[100];??
- ????????sprintf(output,"畸變校正/leftky1/l%d.bmp",i);??
- ????????imwrite(output,PictureCorrection(image,leftIntrinsic,leftDistortion));?//順次保存校正圖??
- ????????delete?[]output;//釋放字符串??
- ????}??
- ????cout<<"**********************************************"<<endl;??
- ????cout<<"??????????????????畸變校正結束????????????????"<<endl;??
- ????cout<<"**********************************************"<<endl;??
- }??
- ??
- //************************************??
- //?Method:????PictureCorrection??
- //?FullName:??PictureCorrection??
- //?Access:????public???
- //?Returns:???cv::Mat???校正圖??
- //?Qualifier:?根據畸變系數與內參校正一張圖片??
- //?Parameter:?Mat?image??
- //?Parameter:?float?intrinsic[3][3]?????內參??
- //?Parameter:?float?distortion[1][5]????畸變矩陣??
- //************************************??
- Mat?PictureCorrection(?Mat?image?,float?intrinsic[3][3],float?distortion[1][5])??
- {??
- ????Size?image_size?=?image.size();??
- ??
- ????Mat?intrinsic_matrix?=?Mat(3,3,CV_32FC1,intrinsic);??
- ????Mat?distortion_coeffs?=?Mat(1,5,CV_32FC1,distortion);??
- ????Mat?R?=?Mat::eye(3,3,CV_32F);?????????
- ????Mat?mapx?=?Mat(image_size,CV_32FC1);??
- ????Mat?mapy?=?Mat(image_size,CV_32FC1);??????
- ????initUndistortRectifyMap(intrinsic_matrix,distortion_coeffs,R,intrinsic_matrix,image_size,CV_32FC1,mapx,mapy);??
- ????Mat?t?=?image.clone();??
- ????cv::remap(?image,?t,?mapx,?mapy,?INTER_LINEAR);??
- ????return?t;??
- }??
- ??
- ??
- //************************************??
- //?Description:?采用hough變換求取大球圓心??
- //?Method:????Daqiu??
- //?FullName:??Daqiu??
- //?Access:????public???
- //?Returns:???void??
- //?Author:????bhy??
- //?Date:??????2016/12/28??
- //?History:??
- //************************************??
- void?Daqiu()??
- {??
- ????cout<<"**********************************************"<<endl;??
- ????cout<<"??????????????????計算大球圓心????????????????"<<endl;??
- ????cout<<"**********************************************"<<endl;??
- ??
- ????Mat?img;??
- ????//右相機?ContrastAndBright(2.5,50);??
- ????system("md?大球圓心\\rightky1");??
- ??
- ????cout<<"右圖:"<<endl;??
- ??
- ????for?(int?i=1;?i<=PicNum;?i++)??
- ????{??
- ????????stringstream?strStm;??
- ????????string?strFileName;??
- ????????strStm?<<?i;??
- ????????strStm?>>?strFileName;??
- ????????strFileName?=?"亮度對比度/rightky1/r"?+?strFileName?+?".bmp";??
- ????????img?=?imread(strFileName,IMREAD_GRAYSCALE);??
- ??
- ????????GaussianBlur(img,img,Size(5,5),0);??
- ??
- ????????vector<Vec3f>?circles;??
- ????????HoughCircles(?img,?circles,?CV_HOUGH_GRADIENT,?3?,70,?70,?30,?95?,100);//hough圓變換??
- ????????Point2f?center(0,0);??
- ????????float?radius;??
- ????????for?(int?j?=?0;?j?<?circles.size();?j++)??
- ????????{??
- ????????????if?(circles[j][0]?>?center.x?&&?circles[j][0]?<?img.cols/2)??
- ????????????{??
- ????????????????center.x?=?circles[j][0];??
- ????????????????center.y?=?circles[j][1];??
- ????????????????radius?=?circles[j][2];//半徑???
- ????????????}??
- ????????}??
- ??
- ????????rightDaqiu[i-1][0]?=?center.x;??
- ????????rightDaqiu[i-1][1]?=?center.y;??
- ??
- ????????CvScalar?color?=?CV_RGB(0,0,0);??
- ????????circle(?img,?(Point)center,?radius,?color,?3,?8,?0);//繪制圓??
- ????????circle(?img,?(Point)center,?3,?color,?3,?8,?0);//繪制圓心??
- ????????cout<<"圓心:"<<center<<endl;//為了保證精度,以原值輸出??
- ??
- ????????char*?output?=?new?char[100];??
- ????????sprintf(output,"大球圓心/rightky1/r%d.bmp",i);??
- ????????imwrite(output,img);?//順次保存校正圖??
- ????????delete?[]output;//釋放字符串??
- ????}??
- ??
- ????system("md?大球圓心\\leftky1");??
- ??
- ????cout<<"左圖:"<<endl;??
- ??
- ????for?(int?i=1;?i<=PicNum;?i++)??
- ????{??
- ????????stringstream?strStm;??
- ????????string?strFileName;??
- ????????strStm?<<?i;??
- ????????strStm?>>?strFileName;??
- ????????strFileName?=?"亮度對比度/leftky1/l"?+?strFileName?+?".bmp";??
- ????????img?=?imread(strFileName,IMREAD_GRAYSCALE);??
- ??
- ????????GaussianBlur(img,img,Size(5,5),0);??
- ??
- ????????vector<Vec3f>?circles;??
- ????????HoughCircles(?img,?circles,?CV_HOUGH_GRADIENT,?3?,70,?30,?50,?100?,110);//hough圓變換??
- ????????Point2f?center(0,1024);??
- ????????float?radius;??
- ????????for?(int?j?=?0;?j?<?circles.size();?j++)??
- ????????{??
- ????????????if?(circles[j][1]<center.y)??
- ????????????{??
- ????????????????center.x?=?circles[j][0];??
- ????????????????center.y?=?circles[j][1];??
- ????????????????radius?=?circles[j][2];//半徑??
- ????????????}??
- ????????}??
- ????????leftDaqiu[i-1][0]?=?center.x;??
- ????????leftDaqiu[i-1][1]?=?center.y;??
- ??
- ????????CvScalar?color?=?CV_RGB(0,0,0);??
- ????????circle(?img,?center,?radius,?color,?3,?8,?0);//繪制圓??
- ????????circle(?img,?center,?3,?color,?3,?8,?0);//繪制圓心??
- ????????cout<<"圓心:"<<center<<endl;//為了保證精度,以原值輸出??
- ??
- ????????char*?output?=?new?char[100];??
- ????????sprintf(output,"大球圓心/leftky1/l%d.bmp",i);??
- ????????imwrite(output,img);?//順次保存校正圖??
- ????????delete?[]output;//釋放字符串??
- ????}??
- ??
- ????cout<<"**********************************************"<<endl;??
- ????cout<<"??????????????????圓心計算結束????????????????"<<endl;??
- ????cout<<"**********************************************"<<endl;??
- }??
?
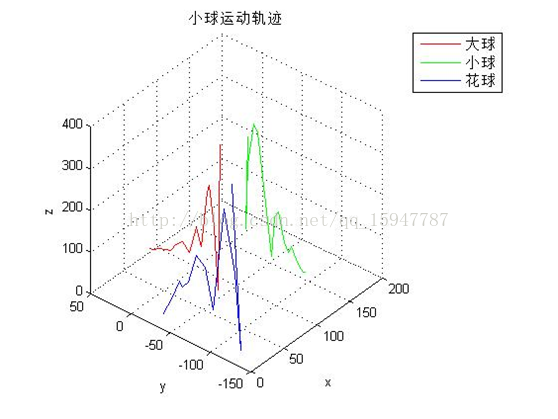
運行該程序,會提取生成的“三維坐標.csv”中的空間坐標數據,并繪制運動軌跡需要注意的是,在“三維坐標.csv”文件中直接修改圓心坐標沒有用,需要在工程中的initPos()修改。
[cpp]?view plain?copy
- clc;clear;??
- M?=?csvread('三維坐標.csv',3,6,[3,6,16,8]);??
- x?=?M(:,1);??
- y?=?M(:,2);??
- z?=?M(:,3);??
- plot3(x,y,z,'r');??
- %legend('大球');??
- hold?on??
- ??
- M?=?csvread('三維坐標.csv',20,6,[20,6,33,8]);??
- x?=?M(:,1);??
- y?=?M(:,2);??
- z?=?M(:,3);??
- plot3(x,y,z,'g');??
- %legend('小球');??
- hold?on??
- ??
- M?=?csvread('三維坐標.csv',37,6,[37,6,50,8]);??
- x?=?M(:,1);??
- y?=?M(:,2);??
- z?=?M(:,3);??
- plot3(x,y,z,'b');??
- %legend('花球');??
- hold?on??
- ??
- legend('大球','小球','花球');??
- title('小球運動軌跡');??
- xlabel('x');??
- ylabel('y');??
- zlabel('z');??
- grid?on??
- axis?square??
最后繪制的軌跡圖
?
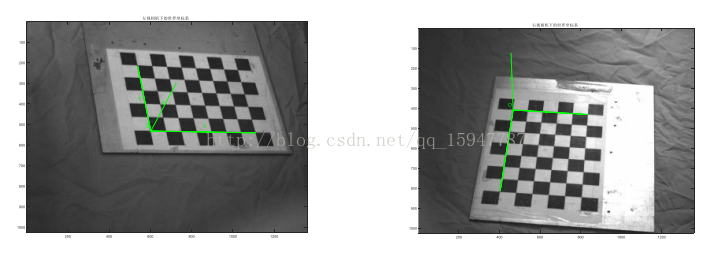
?補一張世界坐標系的圖


)




------內部指令)
![【bzoj3555】[Ctsc2014]企鵝QQ 簡單哈希](http://pic.xiahunao.cn/【bzoj3555】[Ctsc2014]企鵝QQ 簡單哈希)
函數定義及用法畸變矯正與立體校正)
- 內含紅黑樹分析全過程)
)


——觀察者設計模式)




