本系列根據國外一個圖形小哥的講解為本,整合互聯網的一些資料,結合自己的一些理解。
場景的組成部分
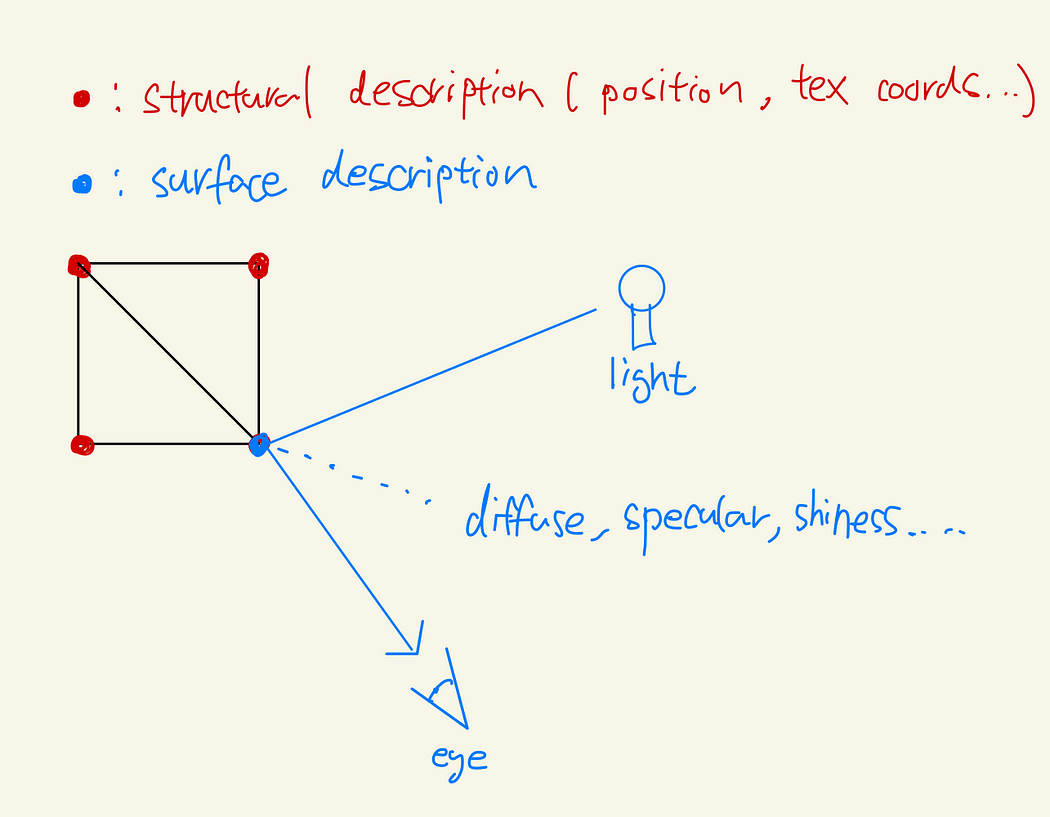
場景相當于一個或多個模型的集合。模型包含以下內容:
- 結構描述:幾何形狀,如頂點、紋理坐標等
- 表面描述:外觀及光照等
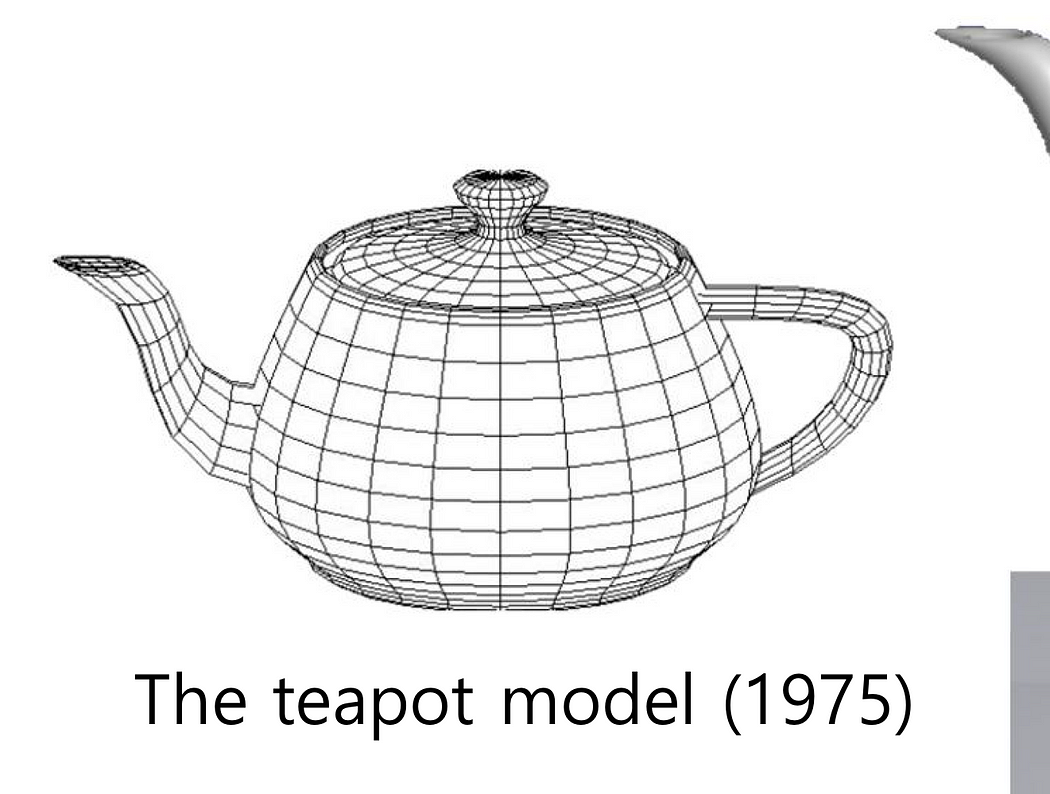
猶他壺模型(Utah teapot)
對于學圖形學的人來說,猶他壺并不陌生。猶他壺模型是計算機圖形學早期著名的3D模型(大約70年代~80年代)。在那個時候,3D模型通常被表示為多項式函數,主要技術被稱為“樣條曲線(spline curves)”,該技術將模型劃分為多個表面塊,如下所示:
三角形網格
現在我們主要使用多邊形或三角形網格來構建模型。
3D 對象數據的類型
- 多邊形網格(polygonal meshes) —— 代表復雜的現實世界對象。
- 樣條面片(spline patches) —— 程序化建模。
- 體積數據,體素(voxel) —— 通過將對象的密度存儲在三維數組中來表示對象。
- 構造立體幾何(Constructive Solid Geometry) —— 常用于機器零件。
- 其他。
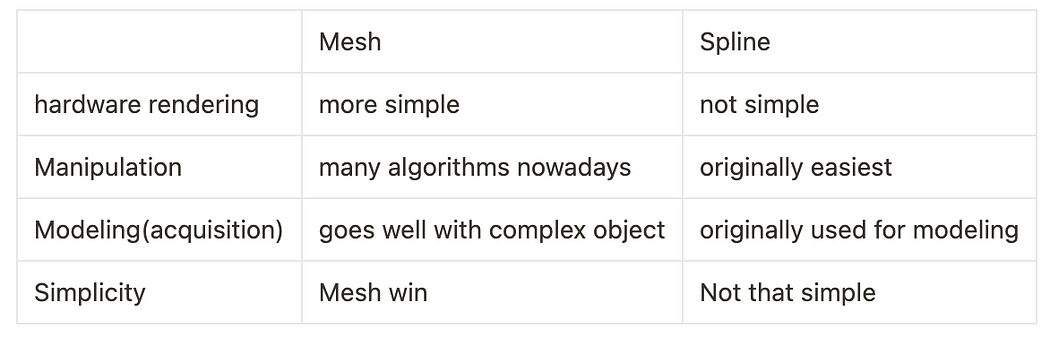
這是網格和樣條線之間的比較:
建模技術
點云技術
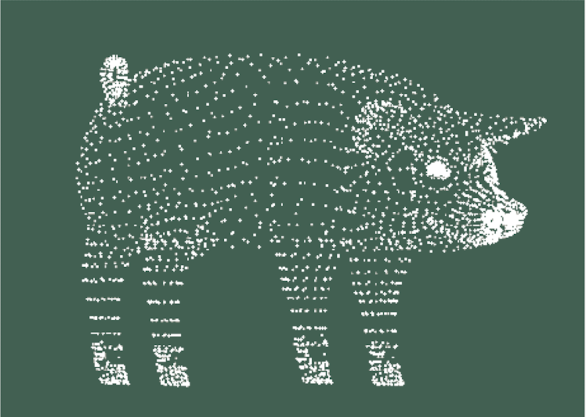

首先,點云樣本是非結構化的數據,所以沒有關于兩點之間鄰接(連通性)的信息。為了使點能夠連接在一起,我們必須使用額外的算法,例如 K 最近鄰算法。
使用點云技術的優點之一是“簡單”。此外,由于點云樣本通過掃描能成為“原始數據raw data”,因此如今備受關注。
使用相機進行 3D 掃描
原理是通過一系列相機掃描物體,之后相機生成點云并捕獲紋理。
原始數據都是“rgbd”數據,“rgb”的部分用于表示顏色和紋理,然后“d”(深度)用于生成點云。深度是指點與相機之間的距離。

多邊形湯(Polygon Soup)
多邊形湯是一組非結構化的多邊形。它可以渲染一個對象,但不可以再進行其他操作,因為這些多邊形之間并沒有幾何上的連系,也不含拓撲信息。為什么起這個名可以看下知乎的一個回答。
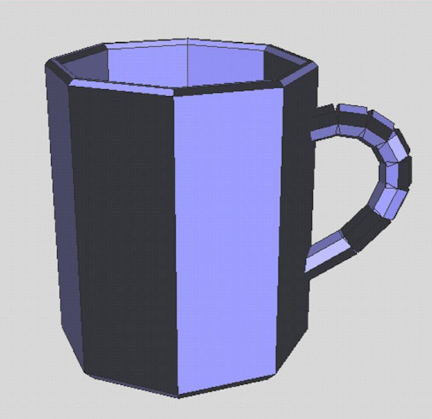
網格(Mesh)
網格是一組連接的多邊形(通常是三角形)。 例如,多邊形可以由多個三角形組成,并且三角形表示為一組頂點。一開始三角形之間沒有連接,我們可以通過為每個頂點附加有關相鄰三角形的附加信息(索引)來實現多邊形上的連接。
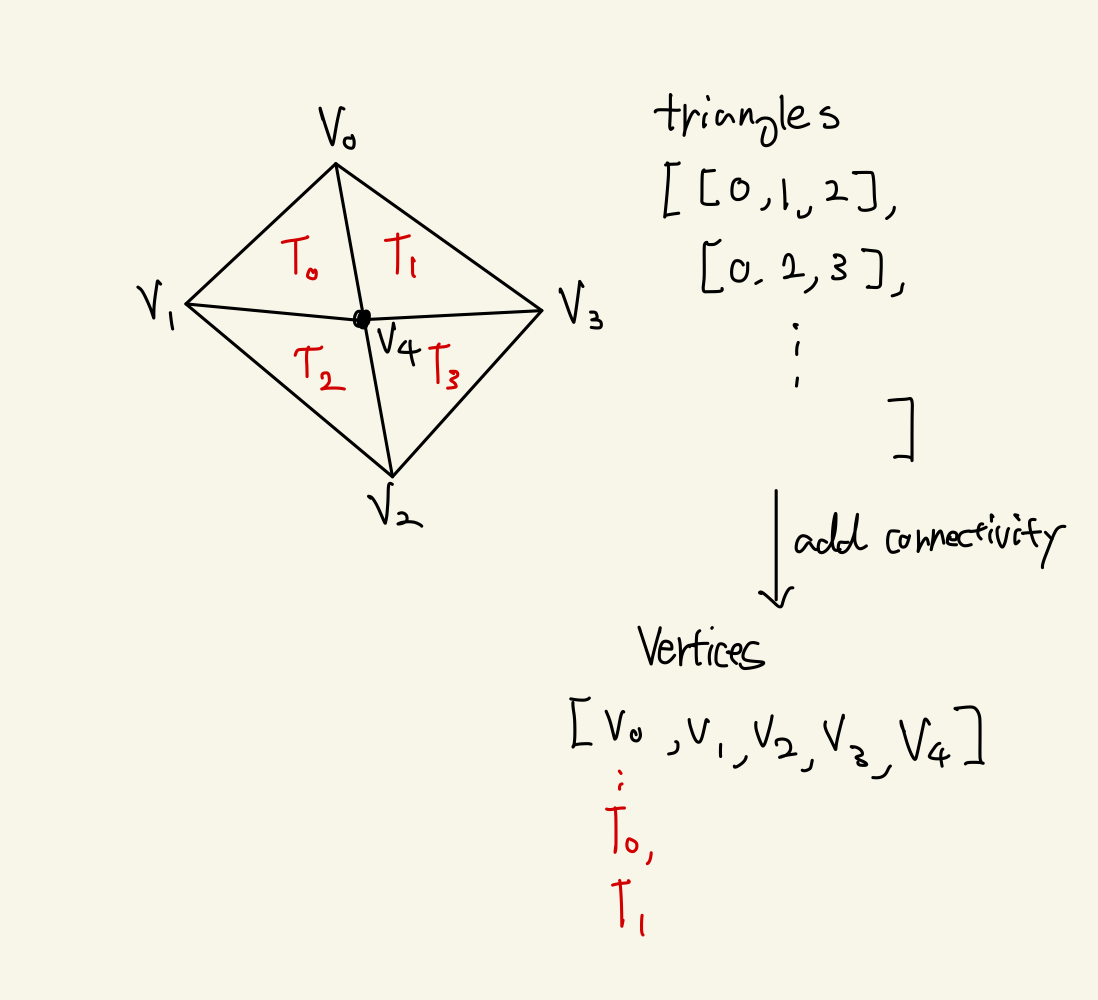
網格是表示對象的顯式方法。
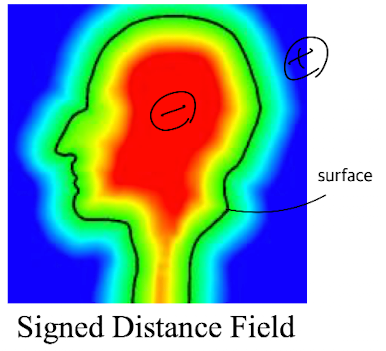
隱式曲面(水平集 Level set)
通過使用三維函數,我們可以隱式地表示一個對象。曲面表面上的點應滿足“F(x,y,z) = 0”。當函數的結果為零時,表示該點是曲面上的一個點,稱為等值曲面。
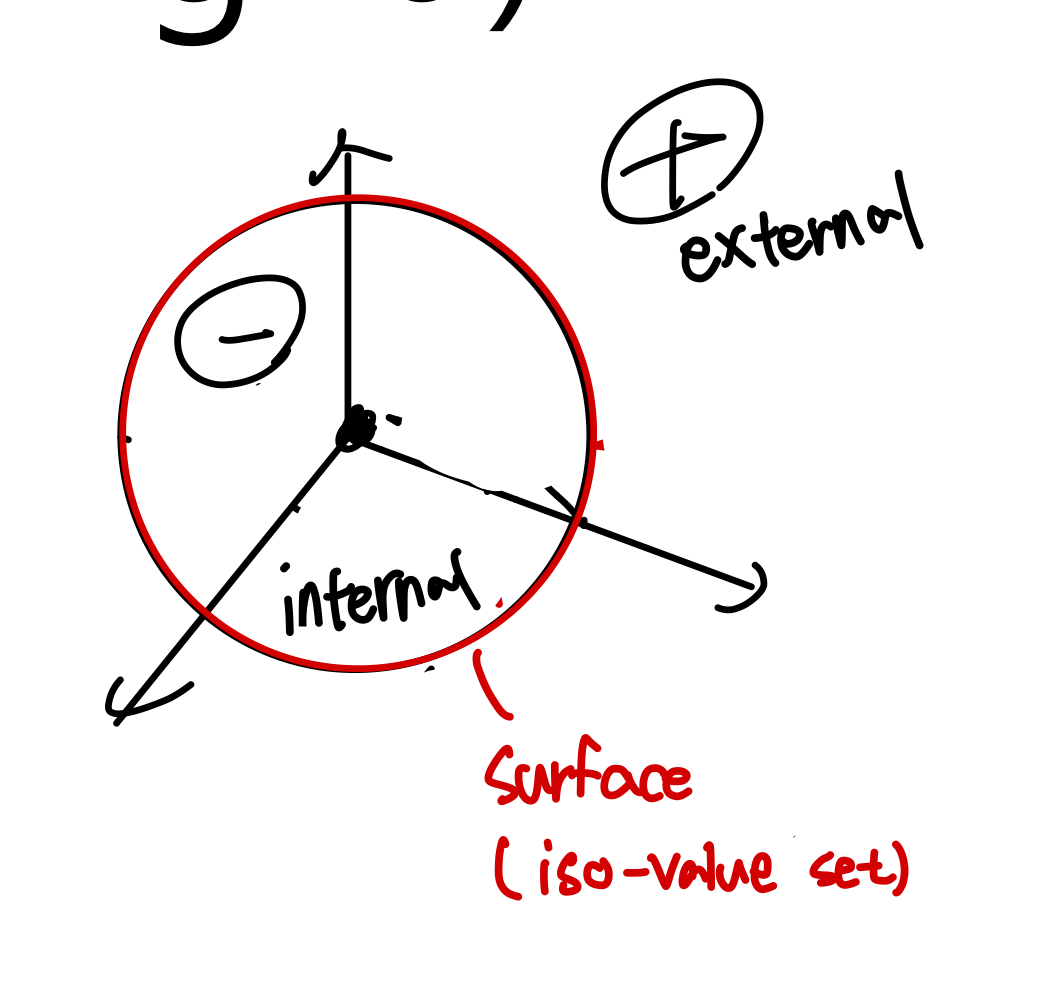
這種技術有優點也有缺點。
優點:
- 可以保證模型無孔洞
- 易于改變拓撲
缺點:
- 必須遍歷體積數據,就會造成 CPU 時間開銷,導致速度慢。
- 需要更多的內存空間。
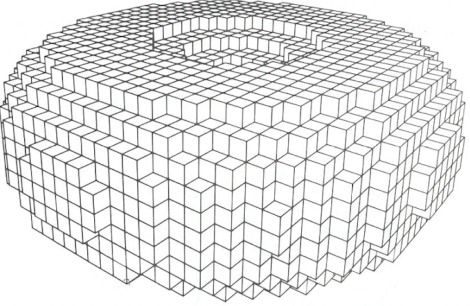
體素(Voxels)
醫療領域在CT、MRI中經常使用此類物體。體素是體積數據的 3D 圖像。
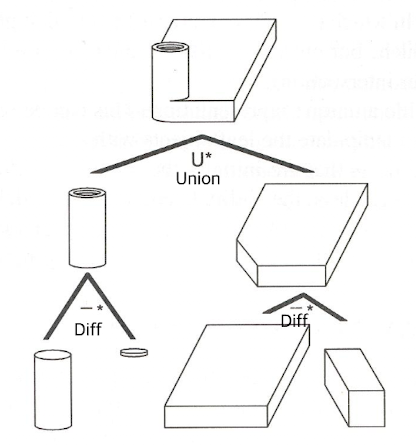
構造立體幾何
使用主要的幾何圖形,從布爾運算的層次結構中獲得目標幾何圖形(并集、差集和交集),例子之一是CAD程序中的機械建模。
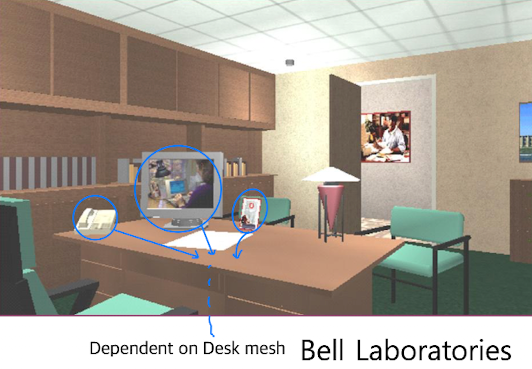
場景圖(Scene Graph)
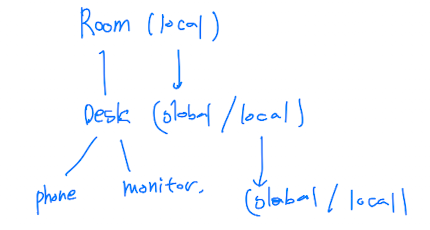
文章的開頭提到過“一個場景相當于一個或多個模型的組合”。我們可以將模型放置為層次樹,而不是將它們放置為列表。
如下圖所示,從辦公桌的角度來看,桌面上的一組模型(電話、鏡子、相框)是葉子節點。通過使它們依賴于辦公桌,我們可以構建新的模型。
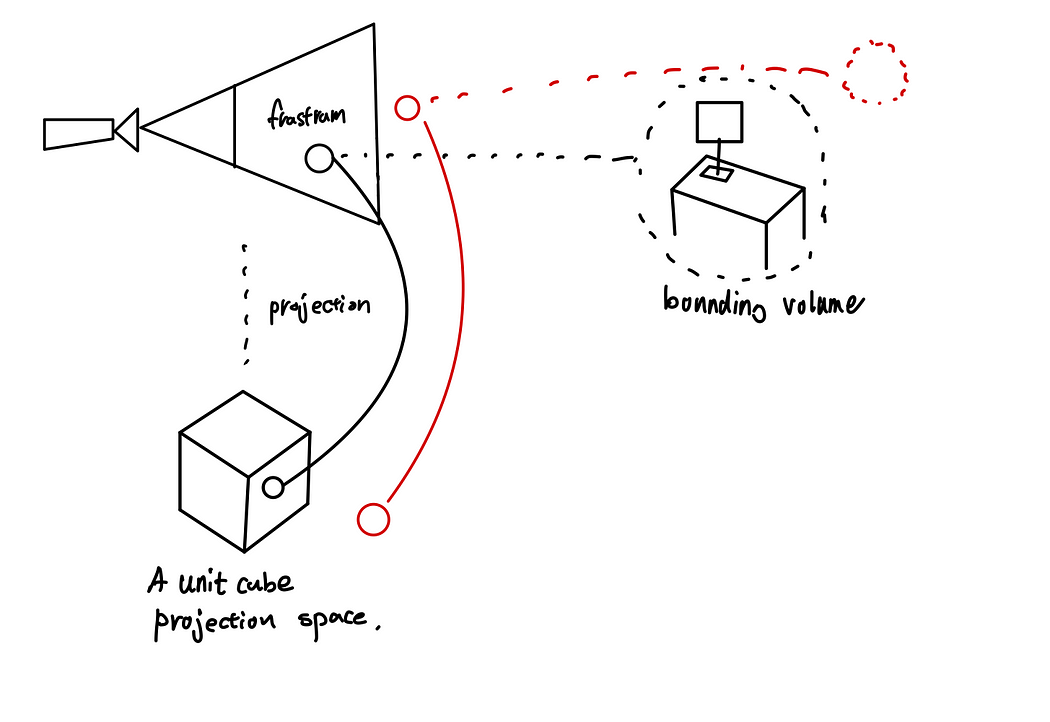
通過繪制一組對象的圖形,我們可以應用視椎體進行剔除。“視錐體”是相機能夠看到物體的空間。“剔除”是一種不會在視錐體空間之外渲染對象的技術。創建一組模型后,我們可以為包含所有對象的組設置包圍體。如果我們將視圖空間投影到單位立方體空間(NDC空間),紅球將位于該空間之外。然后,我們可以在 CPU 操作內將其從渲染目標中刪除。
程序化建模
我們在這里使用替換規則。
程序化建模的一個例子是“地形”。我們不使用純隨機數,而是利用高度圖并生成受相鄰位置高度影響的隨機數。


)




)



新詞發現)







)
)