數據新動能驅動中國經濟增長的統計研究-基于數字產業化和產業數字化的經濟貢獻測度
整體求解過程概述(摘要)
??伴隨著數據要素化進程的不斷加深,對于數據如何作用于經濟發展,數據與其他要素結合產生的動能應該如何測度的研究愈發重要。本文將數據新動能分解為“數字產業化”與“產業數字化”兩個角度來對其進行統計測度,以更好地去理解數據是如何賦能與其他要素,助力我國數字經濟高質量發展。
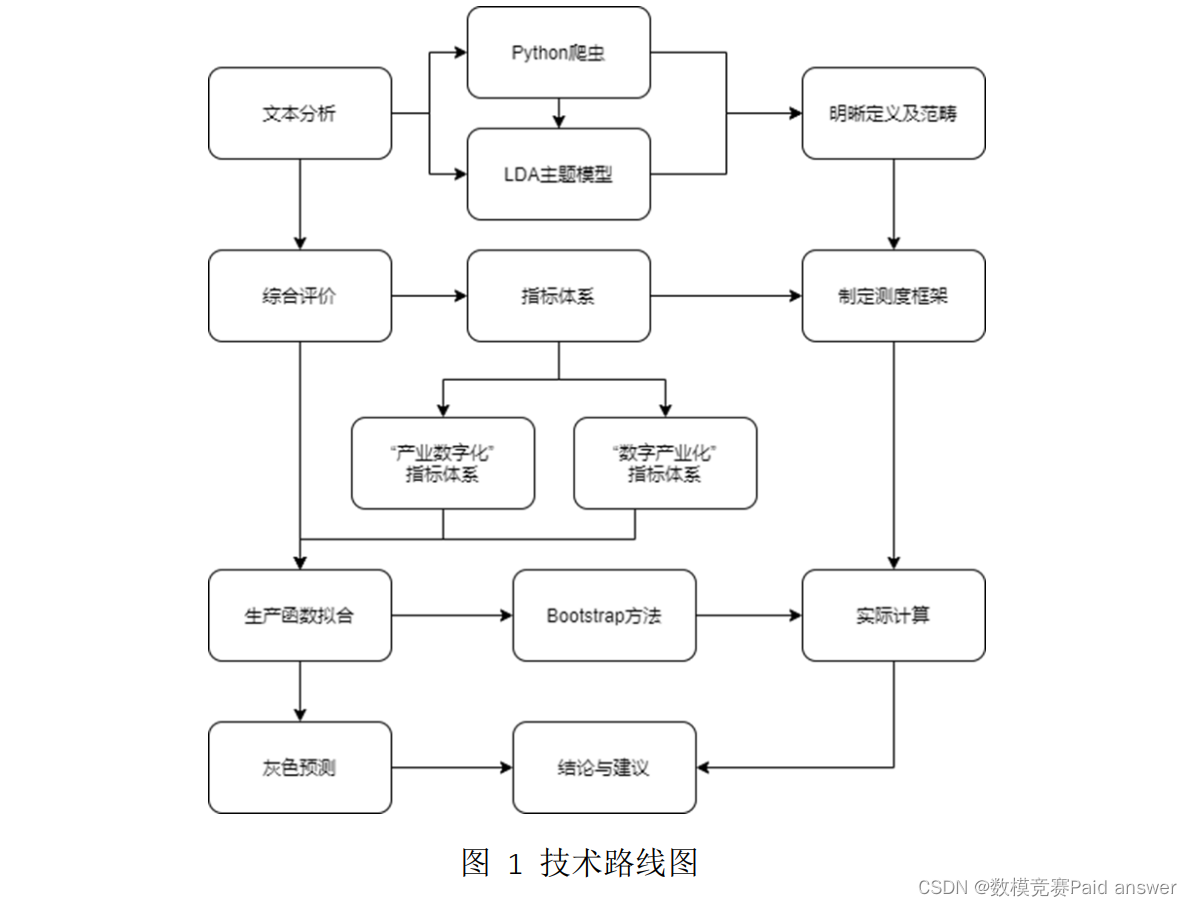
??本文首先進行了文本分析,利用爬蟲從知網、百度資訊上抓取相關文獻,經過預處理、清洗、分詞后,從詞云圖獲取到文獻聚焦的熱點。在對分詞后的建立“文檔-詞項”矩陣與 TI-IDF,并根據 TI-IDF 的結果建立 lda 主題模型,最終得到“數據要素”“技術創新”“宏觀政策”“轉型升級”“交易模型”“數據監管”六大主題,為后續問題的探討明確了方向。
??之后我們選擇依據經濟原理,通過綜合評價來構建與“數字產業化”與“產業數字化”相對應的指標體系并使用柯布-道格拉斯生產函數,對“數字產業化”進行投入產出分析,通過 bootstrap 方法擬合方程計算得出各種生產要素在數據產業中的貢獻率,并計算出相對應的“產業數字化”生產函數,通過數學變換分析得出了相應的數據要素對于勞動力,資本,科技的作用,來使得我們以更好地理解、分析“數字產業化”和“產業數字化”共同作用下的經濟合力——數據新動能。
問題分析
??本次建模所要研究的主要問題,就是探索測度數據賦能經濟而產生新動能的方式,希望能夠尋找到部分具有較強代表性,較高準確性的測度指標,找到一種合適的方式,來對數據要素這一新興生產要素在對經濟賦能過程中所產生的價值進行測度,助力數字產品與服務市場規范化,激發數據產業新動能,更好的發揮數據驅動新消費的作用,推動我國數字經濟新發展。
??本文接下來將進行數據新動能驅動經濟增長的機理探索,基于文本挖掘的方法來對數據新動能進行解析,并對數據新動能及相關概念界定,分析數據新動能、“數字產業化”和“產業數字化”的關系與相互作用。之后我們將進行數據要素賦能中國經濟增長的統計模型構建,并將其分為“數字產業化”評價指標體系和“產業數字化”評價指標體系進行設計。
??基于這兩個評價指標體系,我們將構建“數字產業化”和“產業數字化”的生產模型進行分析,并利用這一模型來進行數據要素賦能中國經濟增長的測度分析,最后我們將根據我們研究的結果得出相關結論,并提出相關建議,助力數字化要素發展,讓數據新動能使我國經濟發展迸發出新的活力。
模型的建立與求解
??為了更好的了解和界定數據新動能,本文進行了文本分析,利用 Python 爬蟲從知網、百度資訊上抓取相關文獻,經過預處理后,共計獲得文章 622 篇。在對文本進行清洗、分詞后,按照詞頻制作詞云圖,從詞云圖獲取到文獻聚焦的熱點。在對分詞后的建立“文檔-詞項”矩陣與 TI-IDF,并根據 TI-IDF 的結果建立lda 主題模型,以便從中獲取主題,為后續問題的研究提供思路。通過文本分析后我們發現數據新動能由于各方面存在的很大的寬泛性和不確定性,直接測度沒有標準,測度難度較大,所以我們選擇使用綜合評價體系來進行指標設計,從側面進行測度。通過數據新動能作用方式將其劃分為“數字產業化”“產業數字化”兩部分分別進行測度,并將其擬合成生產函數的形式,利用數學變換來進行數據賦能的測度。
??在擬合生產函數的過程中,由于數據量過少,部分指標統計近些年來才開始統計,我們使用了插值法來進行空值補全。為了解決模型擬合中由于數據量過少,大部分變量不顯著的問題,我們通過 R 語言使用了對樣本及其分布要求較低的bootstrap 方法來近似擴大樣本的過程,進行 1500 次重抽樣來進行方程參數的估計。最終擬合出較為準確的回歸方程,并進行下一步的灰色預測來對指標體系中的指標進行進一步預測。
??最后,我們根據上述結果進行分析并提出了相關的建議,希望能助力于我國數字經濟的發展,使我國經濟迸發出更多的數據新動能。
模型的建立與求解整體論文縮略圖
全部論文請見下方“ 只會建模 QQ名片” 點擊QQ名片即可
(代碼和文檔not free)
import os
import numpy as np
import numpy.linalg as nplg
import scipy.optimize as spopt
import matplotlib.pyplot as plt
import scipy.interpolate as spidef zje_dp_objective(x,alpha, beta, delta,kgrid,pp, pp2, pp3):c = np.power(kgrid, alpha) + (1 - delta) * kgrid - xy = - np.sum(np.log(c) + beta * pp(x))return ydef zje_dp_objective_jac(x,alpha, beta, delta,kgrid,pp, pp2, pp3):c = np.power(kgrid, alpha) + (1 - delta) * kgrid - xyp = np.power(c, -1) - beta * pp2(x)return ypdef zje_dp_objective_hes(x,alpha, beta, delta,kgrid,pp, pp2, pp3):c = np.power(kgrid, alpha) + (1 - delta) * kgrid - xydp = np.diag(np.power(c, -2) - beta * pp3(x))return ydpdef zje_dp_pchip(alpha, beta, delta,m_kgrid, m_kgrid2,iternum,figurepath=None):'''dynamic programming with pchip'''kbar = np.power(alpha * beta / (1 - beta * (1 - delta)), 1 / (1 - alpha))kl = 0.75 * kbarkh = 1.25 * kbarkgrid = np.linspace(kl, kh, m_kgrid)v2 = np.log(kgrid)optk2 = kgridlb = np.ones(m_kgrid) * kgrid[0]ub = np.power(kgrid, alpha) + (1 - delta) * kgrid - 1e-06for kkk in range(iternum):v = v2optk = optk2pp = spi.pchip(kgrid, v)pp2 = pp.derivative(1)pp3 = pp.derivative(2)x0 = optkres = spopt.minimize(zje_dp_objective, x0,jac=zje_dp_objective_jac,hess=zje_dp_objective_hes,method="trust-exact",bounds=(lb, ub),args=(alpha, beta, delta, kgrid, pp, pp2, pp3,))optk2 = res.xoptc = np.power(kgrid, alpha) + (1 - delta) * kgrid - optk2v2 = np.log(optc) + beta * pp(optk2)vdiff = nplg.norm(v2 - v)kdiff = nplg.norm(optk2 - optk)if (vdiff < 1e-08 and kdiff < 1e-08):breakkspace = np.linspace(kgrid[0], kgrid[m_kgrid - 1], m_kgrid2)pp = spi.pchip(kgrid, optk2)kp = pp(kspace)c = np.power(kspace, alpha) + (1 - delta) * kspace - kpkpp = pp(kp)cp = np.power(kp, alpha) + (1 - delta) * kp - kppee = 1 - beta * np.power(cp, -1) * (alpha * np.power(kp,alpha - 1) + 1 - delta) / np.power(c, -1)fig = plt.figure(figsize=(16, 9))plt.plot(kspace, np.log10(np.abs(ee)))title = "zje_dp_pchip-eulereuqtionerrors.png"plt.title(title, fontsize=20)plt.grid()plt.show()if figurepath is not None:fig.savefig(os.path.join(figurepath, title), dpi=300)fig = plt.figure(figsize=(16, 9))plt.plot(kspace, kp)plt.plot(kspace, kspace, 'k--')title = "zje_dp_pchip-k&kp.png"plt.title(title, fontsize=20)plt.grid()plt.show()if figurepath is not None:fig.savefig(os.path.join(figurepath, title), dpi=300)return optk2, kspace, kp, kpp, c, cp, eeif __name__ == "__main__":alpha = 0.36beta = 0.99delta = 0.025m_kgrid = 31m_kgrid2 = 10001iternum = 2000figurepath = "../figure"zje_dp_pchip(alpha, beta, delta,m_kgrid, m_kgrid2,iternum,figurepath=figurepath)









)








)
