原創 | 文 BFT機器人?
制造商在其操作中使用各種類型的機器人,每種機器人都具有特定的能力和功能。我們將討論制造業中使用的一些最常見類型的機器人,以及哪種機器人可能最適合您的應用。
01
關節機器人
關節式機器人是一種工業機器人,具有一系列關節,使其能夠像人的手臂一樣移動。這些關節通常是旋轉關節,可以在一定范圍內移動,為機器人提供靈活性和機動性。
關節式機器人的手臂通常由若干段組成,每段連接到一個關節。這些段可以是直的或彎曲的,具體取決于特定的機器人型號和應用。手臂的末端通常連接有一個工具或末端執行器,如夾爪或專用工具,用于特定操作。關節式機器人具有多功能性,可以執行各種任務,如焊接、物料搬運、裝配和檢測,它們可以在狹小的空間中工作,可以越過障礙物,使其非常適用于復雜的制造操作。它們覆蓋多種運動的能力使其更適應生產過程或工件的變化。
關節式機器人通常可以承載較大的負載,目前FANUC機器人的最大負載能力可達2300kg。它們還可以以較高的速度和高精度工作,提高生產效率和質量。
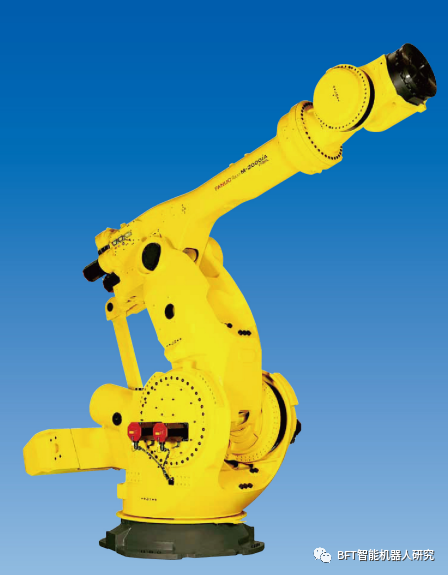
圖片來源:FANUC M-2000iA/2300
02
SCARA機器人
SCARA機器人是一種工業機器人,其手臂結構類似于關節式機器人,但具有固定基座。SCARA的首字母縮寫代表選擇性組裝機器人手臂。
SCARA機器人的手臂由兩個平行關節組成,允許手臂在水平平面內移動,帶有第三個關節,允許手臂上下移動。這種設計使機器人具有更高的剛性和準確性,使其非常適用于需要在水平平面內進行精確運動的應用,如拾取和放置操作。此類機器人通常用于裝配、檢測和包裝應用,其中需要高度的精度和可重復性。它們也可以以較高的速度工作,使其非常適用于大批量的制造操作。
SCARA機器人是制造業應用中精度和速度至關重要的情況下的熱門選擇。它們提供高水平的精確性、可重復性和靈活性,使其成為尋求提高生產效率和產量的制造商的寶貴工具。

圖片來源:KR6 R500 Z200
03
Cartesian機器人
Cartesian機器人,也稱為門式機器人或線性機器人,是一種沿著直角坐標系移動的工業機器人,創造一個三維的立方體空間。名稱“笛卡爾”來自描述空間位置的笛卡爾坐標系。
這些機器人通常包括一個固定的基座和一個沿X和Y軸移動的頂部門架。Z軸由一個垂直柱提供,可以上下移動,通常附有一個工具或末端執行器。Cartesian機器人以提供精確和可重復運動而聞名,非常適用于需要高精度的應用。
Cartesian機器人最常用于拾取和放置操作、物料搬運和裝配應用,它們可以以較高的速度工作并處理大型負載,使其非常適用于大規模制造操作。它們還可以輕松定制以適應特定的制造需求,例如添加視覺系統進行檢測或引導。
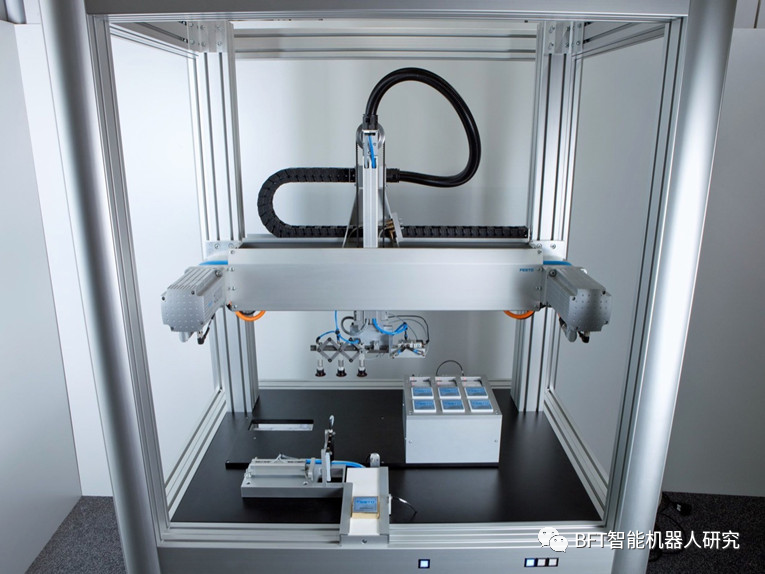
圖片來源:FUYU
04
Delta機器人
Delta機器人最常用于拾取和放置操作、包裝和裝配應用,其中需要高度的精度和速度。它們可以以非常高的速度工作,通常超過每分鐘200個循環,并且能夠以極高的準確性處理小型、輕量級物品。
它們通常用于食品和制藥行業,其中衛生非常關鍵。三角形機器人也非常適用于潔凈室環境,因為它們具有密封設計,防止污染物進入工作區域。

圖片來源:ABB
05
協作機器人
協作機器人,也稱為合作機器人或Cobots,是一種設計用于直接與人類在定義的協作工作區域內互動的機器人類型。與傳統的工業機器人通常在安全柵后運行不同,協作機器人設計成可以在人類工作者附近緊密操作而不構成安全風險。
協作機器人配備了各種安全功能,如傳感器和攝像頭,可以檢測到人的存在并相應地調整運動。它們還設計成重量輕、易于編程,使其能夠快速部署在各種制造環境中。它們最常用于對人類工作者來說重復、危險或困難的任務,如物料搬運、裝配和檢測。它們可以執行各種制造任務,包括焊接、噴漆和包裝。
協作機器人相對于傳統工業機器人具有幾個優勢:它們更靈活,可以輕松重新編程以執行不同的任務,使其非常適用于小批量制造操作,它們還比傳統機器人更具成本效益,使其可供更廣泛范圍的制造商使用。

圖片來源:Franka
06
工業移動機器人(IMR)
移動機器人配備各種傳感器和系統,使它們能夠感知環境并根據該信息做出決策。例如,它們可以使用攝像頭、激光雷達或超聲波傳感器來檢測障礙物或繪制周圍環境的地圖。
在制造業中,移動機器人通常用于物流任務,如在工作站之間或到存儲位置之間移動材料或產品。它們還可以用于質量控制和檢測任務,其中它們可以在工作區域內移動以檢查產品或設備。
總體而言,IMR相對于固定機器人具有幾個優勢,因為它們可以覆蓋更大的區域,并在固定機器人無法訪問的環境中工作。它們還可以輕松重新編程或重新配置,使其更加靈活,適應制造需求的變化。

圖片來源:波士頓Handle機器人
若您對該文章內容有任何疑問,請與我們聯系,我們將及時回應。




簡單隊列)











)


