文章目錄
- 前言
- 一、圖像分割
- 1.1 漫水填充法
- 1.1.1 漫水填充法原理
- 1.1.2 漫水填充法實現步驟
- 1.1.3 代碼實現
- 1.2 分水嶺法
- 1.2.1 分水嶺法原理
- 1.2.2 分水嶺法實現步驟
- 1.2.3 代碼實現
- 1.3 GrabCut法
- 1.3.1 GrabCut法原理
- 1.3.2 GrabCut法實現步驟
- 1.3.3 代碼實現
- 1.4 Mean-Shift法
- 1.4.1 Mean-Shift法原理
- 1.4.2 Mean-Shift法實現步驟
- 1.4.3 代碼實現
- 二、圖像修復
- 2.1 圖像修復原理
- 2.1.1 Telea方法
- 2.1.2 Navier-Stokes方法
- 2.1.3 代碼實現
- 2.2 修補算法
- 2.2.1 修補算法原理
- 2.2.2 修補算法實現步驟
- 2.2.3 OpenCV代碼實現
- 2.2.3.1 方形補丁修補
- 2.2.3.2 圓形補丁修補
- 總結
前言
OpenCV(Open Source Computer Vision Library)作為一個開源的計算機視覺和機器學習軟件庫,提供了豐富的圖像處理功能,使得圖像分析變得更加高效和易于實現。本篇博客旨在提供一個關于OpenCV中圖像分割和圖像修復技術的入門指南,從基本原理到代碼實現,簡要覆蓋這些技術的關鍵方面。

一、圖像分割
圖像分割是圖像處理中的一項重要技術,它涉及將圖像劃分為多個部分或區域,以便更容易地分析和處理。
1.1 漫水填充法
1.1.1 漫水填充法原理
漫水填充 (Flood Fill)算法基于區域生長的概念。它從圖像中的一個點(種子點)開始,然后向所有與該點相連的、顏色/強度相似的區域擴展。
1.1.2 漫水填充法實現步驟
- 選擇一個種子點。
- 檢查相鄰像素是否屬于同一區域(基于顏色/強度相似度)。
- 如果相鄰像素符合條件,則包括它,并繼續向外擴展。
- 重復此過程直到無法擴展。
1.1.3 代碼實現
import cv2
import numpy as np# 讀取圖像
image = cv2.imread('tulips.jpg')
# 創建一個與圖像大小相同的掩碼(mask),并初始化為全0
mask = np.zeros((image.shape[0] + 2, image.shape[1] + 2), dtype=np.uint8)# 定義填充的起始點
start_point1 = (100, 100) # 開始填充的坐標
start_point2 = (420, 200) # 開始填充的坐標
# 定義填充顏色
fill_color = (0, 0, 0) # 黑色
# 定義顏色容差范圍
tolerance = (160, 160, 160, 160) # 上下左右的容差# floodFill函數的參數
flood_fill_flags = 4
flood_fill_flags |= 255 << 8
flood_fill_flags |= cv2.FLOODFILL_FIXED_RANGE# 調用floodFill函數
image_fill = image.copy()
cv2.floodFill(image_fill, mask, start_point1, fill_color, tolerance, tolerance, flood_fill_flags)
cv2.floodFill(image_fill, mask, start_point2, fill_color, tolerance, tolerance, flood_fill_flags)# 顯示結果
mask_img = cv2.merge([mask,mask,mask])
# 獲取圖像的高度和寬度
height, width ,channel= image.shape
# 創建一個新的圖像,高度和寬度各增加一
new_height = height + 2
new_width = width + 2
image_origin = np.zeros((new_height, new_width, channel), dtype=np.uint8)
# 將原始圖像復制到新圖像中
image_origin[:height, :width] = imageimage_flood = np.zeros((new_height, new_width, channel), dtype=np.uint8)
# 將原始圖像復制到新圖像中
image_flood[:height, :width] = image_fillcv2.imshow('Flood Filled Image', cv2.hconcat([image_origin,image_flood, mask_img]))
cv2.waitKey(0)
cv2.destroyAllWindows()
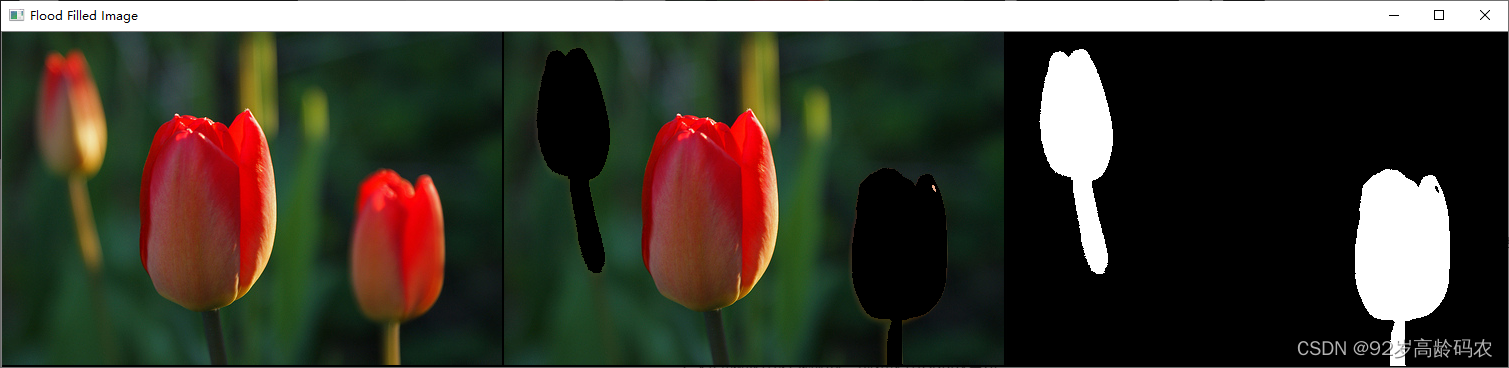
cv2.floodFill 函數用于實現漫水填充算法,即填充一個連通區域的顏色或圖案。這個函數非常適合于圖像分割、對象檢測和圖像編輯等任務。下面是對 cv2.floodFill 函數參數和功能的簡要介紹:
def floodFill(image, mask, seedPoint, newVal, loDiff=None, upDiff=None, flags=None)
image: 輸入/輸出圖像。這是一個單通道或三通道的8位或浮點圖像。除非設置了
FLOODFILL_MASK_ONLY標志,否則此函數會修改輸入圖像。mask: 操作掩碼,應該是一個單通道8位圖像,比輸入圖像寬2個像素,高2個像素。這是一個輸入和輸出參數,因此在使用前需要初始化。漫水填充不能穿過掩碼中非零的像素。例如,邊緣檢測器的輸出可以作為掩碼,以阻止填充穿過邊緣。
seedPoint: 開始點。這是漫水填充開始的像素位置。
newVal: 重新繪制域像素的新值。
loDiff 和 upDiff: 分別代表最大下限和上限的亮度/顏色差異。這些參數決定了填充顏色與周圍像素顏色的最大允許差異。
rect: 可選的輸出參數,函數設置為重新繪制域的最小邊界矩形。
flags: 操作標志。前8位包含連接值,4代表只考慮四個最近鄰像素(那些共享邊的像素),8代表將考慮八個最近鄰像素(那些共享角的像素)。接下來的8位(8-16位)包含用來填充掩碼的值(默認值為1)。例如,4 | (255 << 8) 將考慮4個最近鄰居,并用255的值填充掩碼。
這個函數通過比較像素與其鄰居或種子點的顏色/亮度差異來確定哪些像素屬于同一連接組件,并將這些像素填充為新的顏色或值。在實際應用中,需要根據具體的圖像和需求調整參數,以達到最佳的填充效果。
1.2 分水嶺法
1.2.1 分水嶺法原理
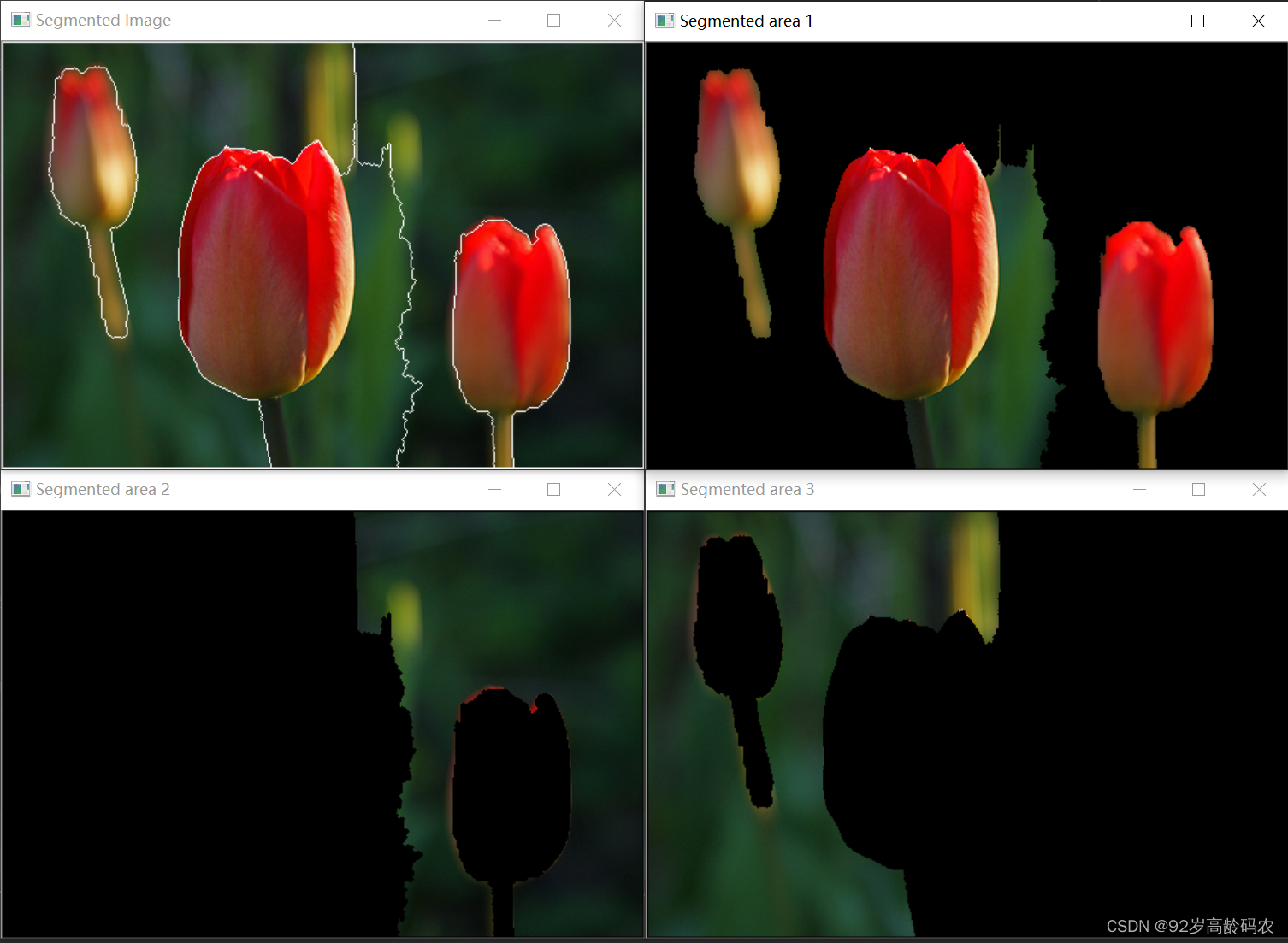
分水嶺(Watershed)算法模擬地理學中的水流原理。在圖像中,任何灰度值可以看作高度,算法模擬雨水流入低洼地區,形成不同的“湖泊”,每個湖泊代表圖像的一個分割區域。
1.2.2 分水嶺法實現步驟
- 對圖像應用邊緣檢測,例如使用Canny算法。
- 應用距離變換。
- 應用分水嶺算法分割圖像。
1.2.3 代碼實現
import cv2
import numpy as np# 讀取圖像
image = cv2.imread('tulips.jpg')
# 轉換為灰度圖
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)# 應用閾值化來標記前景區域
_, thresh = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY_INV + cv2.THRESH_OTSU)# 去除噪聲
kernel = np.ones((7, 7), np.uint8)
opening = cv2.morphologyEx(thresh, cv2.MORPH_OPEN, kernel, iterations=2)# 確定背景區域
sure_bg = cv2.dilate(opening, kernel, iterations=6)
# 確定前景區域
dist_transform = cv2.distanceTransform(opening, cv2.DIST_L2, 5)
_, sure_fg = cv2.threshold(dist_transform, 0.8 * dist_transform.max(), 255, 0)# 找到未知區域
sure_fg = np.uint8(sure_fg)
unknown = cv2.subtract(sure_bg, sure_fg)# 標記標簽
_, markers = cv2.connectedComponents(sure_fg)# 增加1以確保背景不是0,而是1
markers = markers + 1# 標記未知區域為0
markers[unknown == 255] = 0# 應用分水嶺
cv2.watershed(image, markers)
image[markers == -1] = [255, 255, 255]# 遍歷所有的標記
for marker in np.unique(markers):if marker == 0 or marker == -1:# 忽略背景和邊界continue# 創建一個掩碼,使得當前標記區域為白色,其他區域為黑色mask = np.zeros(gray.shape, dtype=np.uint8)mask[markers == marker] = 255# 應用掩碼到原始圖像segmented_image = cv2.bitwise_and(image, image, mask=mask)# 顯示提取的區域cv2.imshow(f'Segmented area {marker}', segmented_image)# 顯示結果
cv2.imshow('Segmented Image', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
cv2.watershed 用于基于標記的圖像分割的函數,實現了一種變體的分水嶺算法。這個函數的關鍵功能是將圖像分割成多個區域,這些區域基于提供的標記來確定。
def watershed(image, markers)
image: 輸入參數。這是一個8位的3通道圖像,即一般的彩色圖像。這個圖像是要應用分水嶺算法進行分割的圖像。
markers: 輸入/輸出參數。這是一個32位單通道圖像,代表標記。它的大小應該與
image相同。在輸入時,markers圖像中應該有正值(>0)標記出預期分割區域的大致輪廓。每個區域由一個或多個連接組件表示,像素值為1、2、3等。函數處理后,markers中的每個像素將被設置為其所屬“種子”組件的值,或在區域邊界處被設置為-1。
- 正值(>0): 表示不同的對象或區域。
- 零值(0): 表示這些像素的歸屬尚未確定,需要算法來定義。
- 負值(-1): 在函數輸出中,這表示不同區域之間的邊界。
cv2.watershed 函數的目的是根據提供的標記,將圖像分割成不同的區域。這對于圖像分割、對象識別和計算機視覺應用特別有用。在實際應用中,通常需要先對圖像進行預處理(如邊緣檢測、閾值化等),然后生成合適的標記圖像,最后應用這個函數進行分割。
1.3 GrabCut法
1.3.1 GrabCut法原理
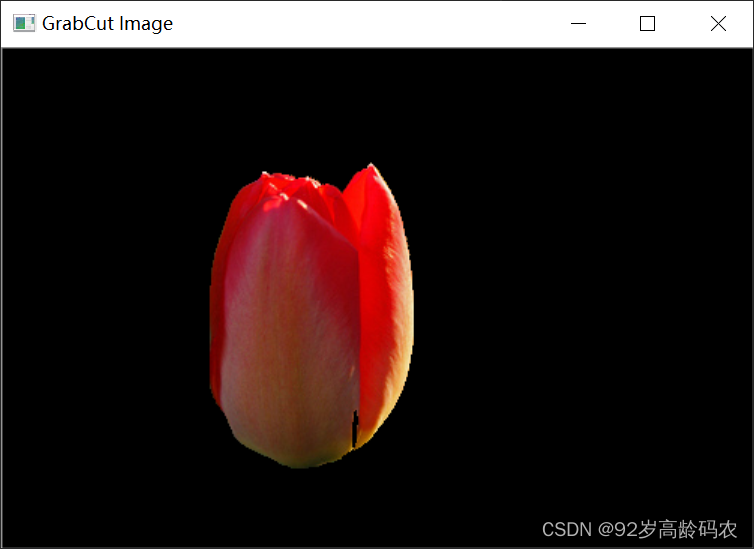
GrabCut是一種基于圖論的圖像分割方法,使用用戶定義的前景和背景區域來初始化分割。算法通過迭代方式優化每個像素屬于前景或背景的概率。
1.3.2 GrabCut法實現步驟
- 用戶定義前景和背景區域。
- 算法初始化并迭代更新每個像素的標簽(前景或背景)。
- 使用GMM(高斯混合模型)對顏色分布建模。
- 利用圖割算法優化像素標簽。
1.3.3 代碼實現
import cv2
import numpy as np# 讀取圖像
image = cv2.imread('tulips.jpg')# 定義前景和背景模型
mask = np.zeros(image.shape[:2], np.uint8)
bgdModel = np.zeros((1, 65), np.float64)
fgdModel = np.zeros((1, 65), np.float64)# 定義矩形(用戶定義的前景區域)
rect = (100, 50, 200, 300)# 應用GrabCut
cv2.grabCut(image, mask, rect, bgdModel, fgdModel, 1, cv2.GC_INIT_WITH_RECT)# 提取前景和可能的前景區域
mask2 = np.where((mask == 2) | (mask == 0), 0, 1).astype('uint8')
image = image * mask2[:, :, np.newaxis]# 顯示結果
cv2.imshow('GrabCut Image', image)
cv2.waitKey(0)
cv2.destroyAllWindows()
cv2.grabCut 實現了 GrabCut 算法,這是一種用于圖像分割的迭代算法。GrabCut 算法可以有效地從圖像中分離前景(目標對象)和背景。
def grabCut(img, mask, rect, bgdModel, fgdModel, iterCount, mode=None)
img: 輸入參數。這是一個8位的3通道圖像,即一般的彩色圖像。這個圖像是要應用 GrabCut 算法的對象。
mask: 輸入/輸出參數。這是一個8位單通道的掩碼圖像。掩碼的元素可以是
GrabCutClasses中的一個,表示像素的不同分類(如明確的背景、可能的背景、明確的前景、可能的前景)。當mode設置為GC_INIT_WITH_RECT時,函數會初始化這個掩碼。rect: 輸入參數,表示包含分割對象的感興趣區域(ROI)。當
mode == GC_INIT_WITH_RECT時使用此參數。ROI 外的像素被標記為“明確的背景”。bgdModel: 輸入/輸出參數。這是用于背景模型的臨時數組。處理同一圖像時不應修改它。
fgdModel: 輸入/輸出參數。這是用于前景模型的臨時數組。處理同一圖像時不應修改它。
iterCount: 輸入參數,表示算法應該執行的迭代次數。
mode: 輸入參數,操作模式,可以是
GrabCutModes中的一個。常見模式包括GC_INIT_WITH_RECT(使用矩形初始化)和GC_INIT_WITH_MASK(使用掩碼初始化)。
cv2.grabCut 函數的主要用途是通過迭代方式將圖像中的目標對象與背景分離。這在圖像編輯、計算機視覺和對象識別等領域非常有用。函數的實現方式是先用一個矩形粗略地標記出感興趣的對象,然后算法迭代地改進前景和背景的分割。
1.4 Mean-Shift法
1.4.1 Mean-Shift法原理
Mean-Shift算法是一種基于特征空間分析的非參數密度估計技術。在圖像分割的上下文中,它通常用于基于顏色的聚類。
1.4.2 Mean-Shift法實現步驟
- 在特征空間(例如顏色空間)中選擇一個窗口。
- 計算窗口內所有點的均值。
- 移動窗口到均值位置。
- 重復步驟2和3,直到收斂。
1.4.3 代碼實現
import cv2# 讀取圖像
image = cv2.imread('tulips.jpg')# 轉換為灰度圖
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
# 應用Canny邊緣檢測
edges = cv2.Canny(gray, 50, 150)# Mean-Shift 參數
spatial_radius = 20 # 空間窗口大小
color_radius = 40 # 顏色窗口大小
max_pyramid_level = 2 # 金字塔層數# 應用Mean-Shift算法
result = cv2.pyrMeanShiftFiltering(image, spatial_radius, color_radius, max_pyramid_level)
# 轉換為灰度圖
gray = cv2.cvtColor(result, cv2.COLOR_BGR2GRAY)
# 應用Canny邊緣檢測
result_edges = cv2.Canny(gray, 50, 150)# 顯示結果
img_edges = cv2.merge([edges,edges,edges])
img_result_edges = cv2.merge([result_edges,result_edges,result_edges])
cv2.imshow('Mean-Shift Segmentation', cv2.vconcat([cv2.hconcat([image, img_edges]),cv2.hconcat([result,img_result_edges])
]))
cv2.waitKey(0)
cv2.destroyAllWindows()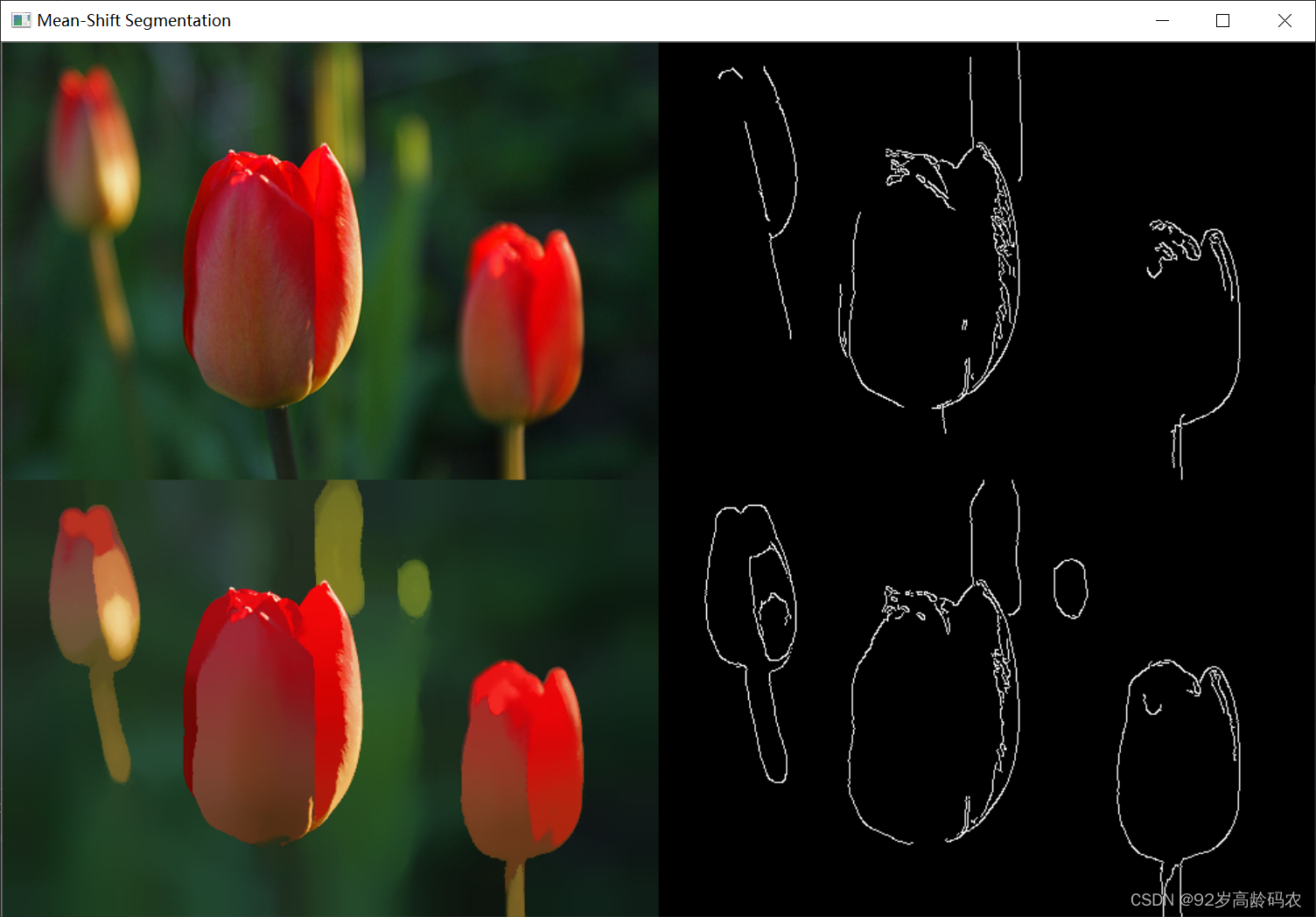
cv2.pyrMeanShiftFiltering 用于執行圖像分割的 Mean-Shift 算法的函數。這個函數主要用于平滑圖像的顏色梯度,同時保留邊緣信息,從而對圖像進行“平面化”處理。以下是對 cv2.pyrMeanShiftFiltering 函數的參數和功能的簡要介紹:
def pyrMeanShiftFiltering(src, sp, sr, dst=None, maxLevel=None, termcrit=None)
src: 輸入參數,源圖像。這是一個8位的3通道圖像,即一般的彩色圖像。
sp: 輸入參數,空間窗口半徑。這個參數決定了像素鄰域的大小。在此鄰域內進行Mean-Shift迭代。
sr: 輸入參數,顏色窗口半徑。這個參數決定了顏色空間中像素鄰域的大小,用于在顏色空間內聚類。
dst: 輸出參數,目標圖像。這是處理后的圖像,格式和大小與源圖像相同。
maxLevel: 可選輸入參數,金字塔的最大層級。當這個值大于0時,算法首先在金字塔的最小層上執行,然后結果被傳播到更大的層上。
termcrit: 可選輸入參數,終止條件。它決定了Mean-Shift迭代何時停止。
cv2.pyrMeanShiftFiltering 函數的主要功能是對圖像進行分割和平滑處理,同時保留邊緣。在空間和顏色空間中,函數對每個像素進行迭代,直到滿足終止條件。這個過程可以幫助去除圖像的細節和噪聲,同時保留主要的結構信息。這種方法在圖像分割和對象識別等應用中非常有用。在實際使用時,sp 和 sr 參數需要根據具體的應用場景和圖像內容進行調整。
二、圖像修復
在圖像處理領域,圖像修復是一項至關重要的技術,它涉及修復圖像中的損壞部分或去除不需要的對象。
2.1 圖像修復原理
圖像修復 (Inpainting)是一種用于修復圖像中損壞區域的技術。它通過分析周圍的像素來重建缺失或損壞的部分。OpenCV提供了兩種主要的Inpainting技術:Telea方法和Navier-Stokes方法。
2.1.1 Telea方法
Telea方法是一種基于快速行進算法的圖像修復技術。這種方法的核心思想是從損壞區域的邊緣開始,逐步向內部填充,直到整個區域被修復完畢。
原理
Telea方法的關鍵在于它如何選擇用于填充缺失區域的像素值。它考慮到了邊緣周圍像素的信息,并基于這些信息來估計缺失像素的最佳值。具體而言,該方法依賴于周圍像素的幾何距離和光強差異來計算修復值。
應用
Telea方法非常適合于修復小到中等大小的損壞區域。由于其基于邊緣信息進行填充,因此在修復裂縫或小孔等缺陷時表現尤為出色。
2.1.2 Navier-Stokes方法
Navier-Stokes方法是另一種流行的圖像修復技術。它基于流體動力學中的Navier-Stokes方程,適用于重建更大區域的圖像。
原理
這種方法將圖像修復問題視為一個流體動力學問題,其中圖像的每個像素都被視為流體粒子。它利用Navier-Stokes方程來模擬流體粒子的運動,從而估算缺失區域的像素值。
應用
Navier-Stokes方法特別適用于大面積損壞的修復,例如修復破損的古老照片或藝術作品中的大片缺失部分。該方法能夠有效地重建圖像的結構和紋理信息,使修復后的區域與周圍環境融合得更自然。
2.1.3 代碼實現
import cv2
import numpy as npdef inpaint_image(image, mask, inpaint_radius=3):restored_telea = cv2.inpaint(image, mask, inpaint_radius, cv2.INPAINT_TELEA)restored_ns = cv2.inpaint(image, mask, inpaint_radius, cv2.INPAINT_NS)return restored_telea, restored_ns# 加載圖像
image = cv2.imread('tulips.jpg')# 創建第一個掩模,用于模擬損壞的區域
mask1 = np.zeros(image.shape[:2], np.uint8)
mask1[40:60, 50:550] = 255 # 水平損壞區域
mask1[60:260, 300:320] = 255 # 垂直損壞區域
mask1[200:220, 100:300] = 255 # 水平損壞區域# 創建第二個掩模,用于模擬損壞的區域
mask2 = np.zeros(image.shape[:2], np.uint8)
cv2.circle(mask2, (395, 215), 80, 255, -1) # 圓形損壞區域# 應用掩模,模擬損壞
damaged_image1 = image.copy()
damaged_image1[mask1 == 255] = [0, 0, 0]
damaged_image2 = image.copy()
damaged_image2[mask2 == 255] = [0, 0, 0]# 使用封裝的函數進行修復
restored_telea1, restored_ns1 = inpaint_image(damaged_image1, mask1)
restored_telea2, restored_ns2 = inpaint_image(damaged_image2, mask2)# 顯示結果
horizontal_stack1 = np.hstack((damaged_image1, restored_telea1, restored_ns1))
horizontal_stack2 = np.hstack((damaged_image2, restored_telea2, restored_ns2))
vertical_stack = np.vstack((horizontal_stack1, horizontal_stack2))
cv2.imshow('Restored Image Telea and Navier-Stokes', vertical_stack)
cv2.waitKey(0)
cv2.destroyAllWindows()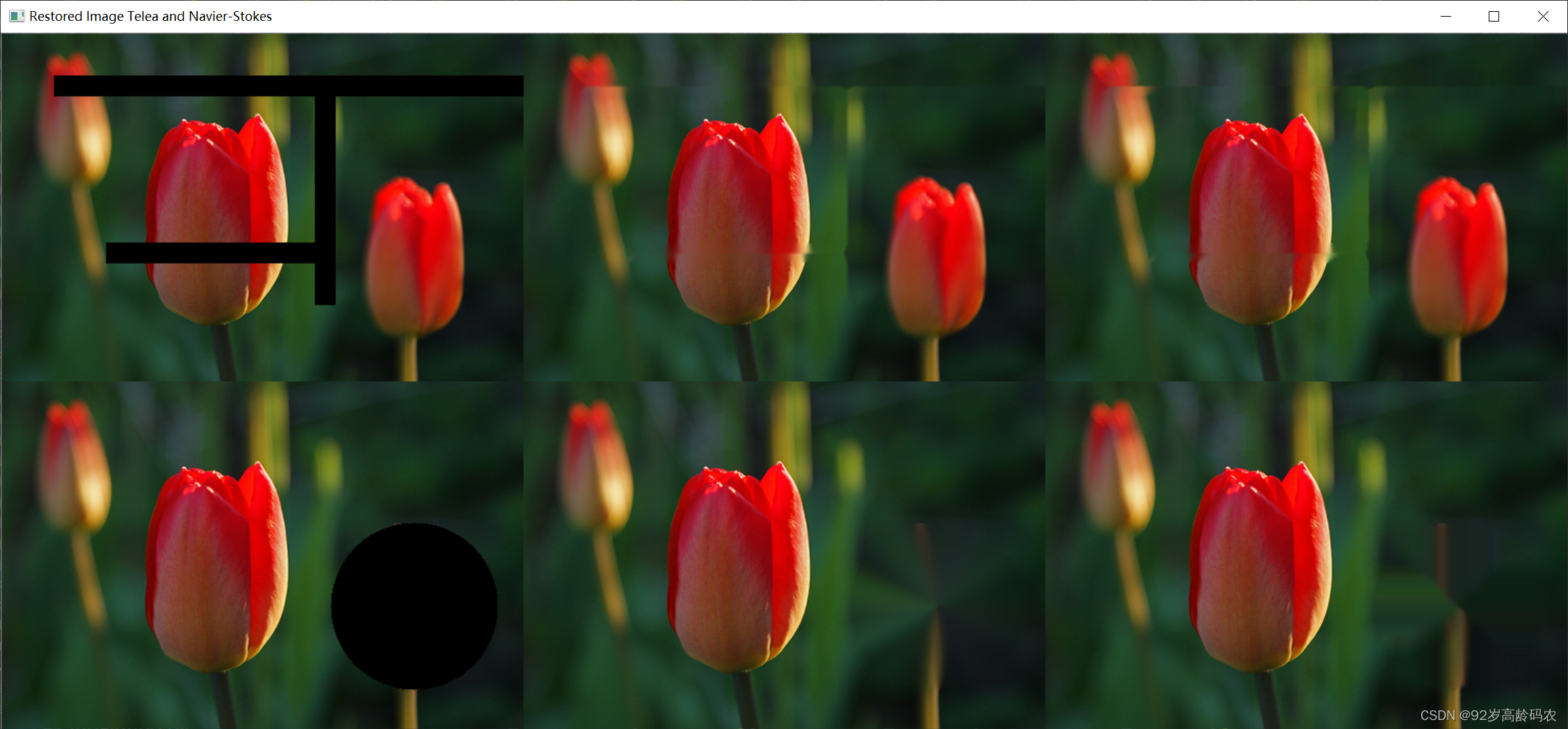
cv2.inpaint 用于修復圖像中的選定區域的函數。它基于圖像的鄰域信息來重建圖像的損壞或不希望的部分。這個函數特別適合用于去除掃描照片中的灰塵和劃痕,或從靜態圖像或視頻中去除不需要的對象。
def inpaint(src, inpaintMask, inpaintRadius, flags, dst=None)
src: 輸入參數,源圖像。這應該是一個8位、16位無符號或32位浮點的單通道或三通道圖像。
inpaintMask: 輸入參數,修復掩模。這是一個8位單通道圖像,非零像素指示需要修復的區域。
inpaintRadius: 輸入參數,圓形鄰域的半徑。每個待修復點考慮的鄰域大小由此半徑決定。
flags: 輸入參數,修復方法。可以是以下兩種之一:
- INPAINT_NS: 基于 Navier-Stokes 的方法。
- INPAINT_TELEA: Alexandru Telea 提出的方法。
dst: 輸出參數,與源圖像大小和類型相同的輸出圖像。
cv2.inpaint 函數通過考慮待修復區域邊界附近的像素來重建選定的圖像區域。該方法可用于修復小的圖像區域,例如去除圖像中的小斑點或遮擋物。它通過估算損壞區域周圍的顏色和強度分布,以合理的方式填充這些區域,從而達到修復的效果。
在實際應用中,需要根據具體問題選擇合適的修復半徑和方法。例如,較小的半徑適用于小面積的修復,而較大的半徑可能更適合廣泛區域的修復。同樣,兩種不同的方法(INPAINT_NS 和 INPAINT_TELEA)在不同類型的圖像和損壞情況下可能會有不同的效果。
2.2 修補算法
2.2.1 修補算法原理
修補(Patching)算法通過選取圖像中未損壞的區域并用其覆蓋損壞部分來進行修復。這種方法對于去除圖像中的小對象或缺陷特別有效。
2.2.2 修補算法實現步驟
- 選擇一個圖像的未損壞區域作為補丁。
- 選擇需要修復的區域。
- 將補丁應用到損壞的區域。
2.2.3 OpenCV代碼實現
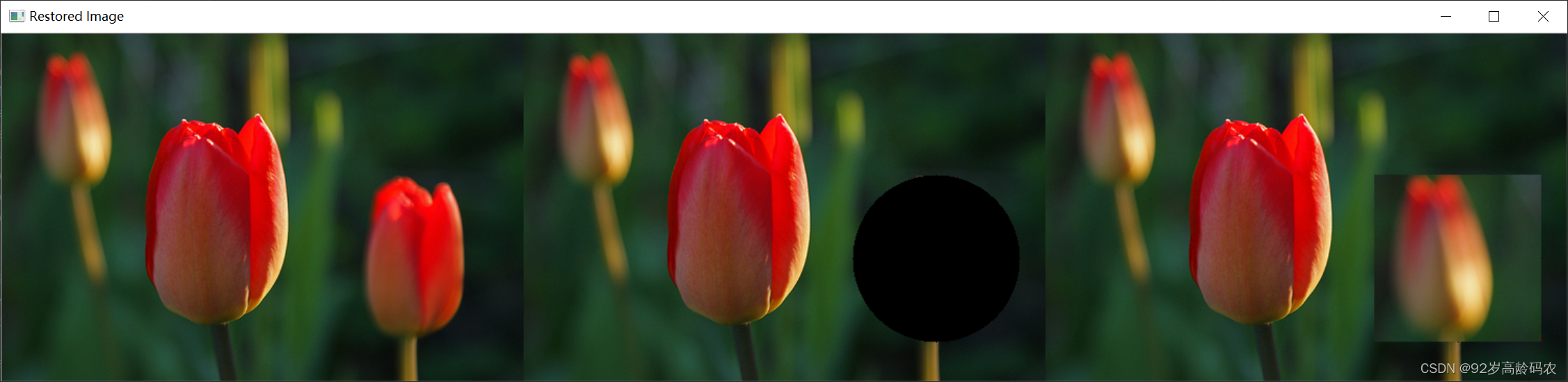
2.2.3.1 方形補丁修補
import cv2
import numpy as np# 加載圖像
image = cv2.imread('tulips.jpg')# 創建掩模,用于模擬損壞的區域
mask2 = np.zeros(image.shape[:2], np.uint8)
cv2.circle(mask2, (395, 215), 80, 255, -1) # 圓形損壞區域# 應用掩模,模擬損壞
damaged_image = image.copy()
damaged_image[mask2 == 255] = [0, 0, 0]# 選擇一個補丁區域
# 注意:這里的坐標(x1, y1, x2, y2)需要根據您的圖像進行調整
x1, y1, x2, y2 = 20, 20, 140, 150 # 補丁區域的坐標
patch = image[y1:y2, x1:x2]# 確定損壞區域的坐標
# 這里我們使用與圓形損壞區域相同的坐標
dx1, dy1, dx2, dy2 = 395 - 80, 215 - 80, 395 + 80, 215 + 80# 確保補丁和損壞區域的大小相同
patch_resized = cv2.resize(patch, (dx2 - dx1, dy2 - dy1))# 應用補丁
restored_image = damaged_image.copy()
restored_image[dy1:dy2, dx1:dx2] = patch_resized# 顯示修復后的圖像
cv2.imshow('Restored Image', cv2.hconcat([image, damaged_image,restored_image]))
cv2.waitKey(0)
cv2.destroyAllWindows()
2.2.3.2 圓形補丁修補
import cv2
import numpy as np# 加載圖像
image = cv2.imread('tulips.jpg')# 創建掩模,用于模擬損壞的區域
mask2 = np.zeros(image.shape[:2], np.uint8)
cv2.circle(mask2, (395, 215), 80, 255, -1) # 圓形損壞區域# 應用掩模,模擬損壞
damaged_image = image.copy()
damaged_image[mask2 == 255] = [0, 0, 0]# 選擇一個圓形補丁區域
px, py, radius = 78, 80, 70 # 原始補丁的半徑
patch_mask = np.zeros(image.shape[:2], np.uint8)
cv2.circle(patch_mask, (px, py), radius, 255, -1)# 創建原始補丁圖像
original_patch = np.zeros_like(image)
original_patch[patch_mask == 255] = image[patch_mask == 255]# 放大補丁到新半徑
new_radius = 80
scale_factor = new_radius / radius
resized_patch = cv2.resize(original_patch, (0, 0), fx=scale_factor, fy=scale_factor)# 重新創建圓形掩模以裁剪放大的補丁
resized_mask = np.zeros(resized_patch.shape[:2], np.uint8)
cv2.circle(resized_mask, (int(px*scale_factor), int(py*scale_factor)), new_radius, 255, -1)
final_patch = np.zeros_like(resized_patch)
final_patch[resized_mask == 255] = resized_patch[resized_mask == 255]restored_image = damaged_image.copy()
# 應用放大的圓形補丁
for i in range(-new_radius, new_radius):for j in range(-new_radius, new_radius):if i**2 + j**2 <= new_radius**2:restored_image[215 + i, 395 + j] = final_patch[int(py * scale_factor) + i, int(px * scale_factor) + j]# 顯示修復后的圖像
cv2.imshow('Restored Image', cv2.hconcat([image, damaged_image,restored_image]))
cv2.waitKey(0)
cv2.destroyAllWindows()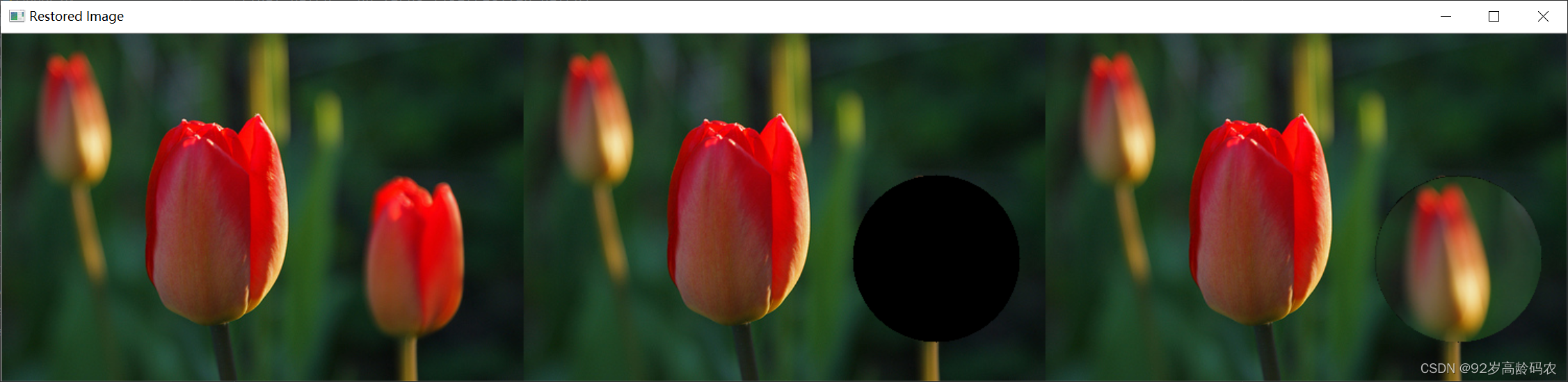
總結
在本篇博客中,我們探討了OpenCV中幾種常用的圖像分割方法:漫水填充法、分水嶺法、GrabCut法和Mean-Shift法,以及圖像修復技術:Telea方法和Navier-Stokes方法,還有修補算法。每種方法都有其獨特的原理和適用場景。漫水填充法和分水嶺法適用于基于區域的分割,GrabCut法適合交互式前景提取,而Mean-Shift法適用于基于密度的聚類分割。在圖像修復方面,Telea方法和Navier-Stokes方法提供了強大的工具,用于修復圖像中的損壞區域。
通過本篇博客,我們能夠獲得對OpenCV圖像分割和修復技術的基本理解,并能夠開始在自己的項目中應用這些技術。圖像處理是一個不斷發展的領域,隨著技術的進步,將有更多的方法和技術被開發出來。因此,持續學習和實踐對于保持在該領域的領先地位至關重要。
:Decoupling maxlogit for out-of-distribution detection (2023 CVPR))


:使用 Aircrack-ng 破解 WEP 密碼)
)
)用法解析)








)




