online verification技術
實時安全校驗技術:留一手
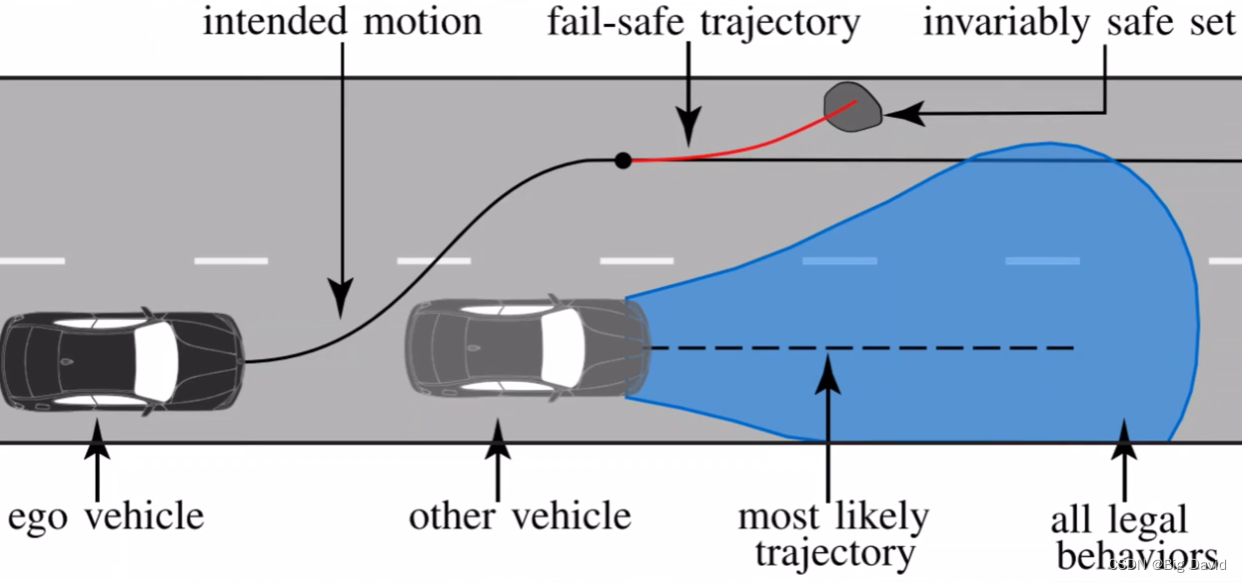
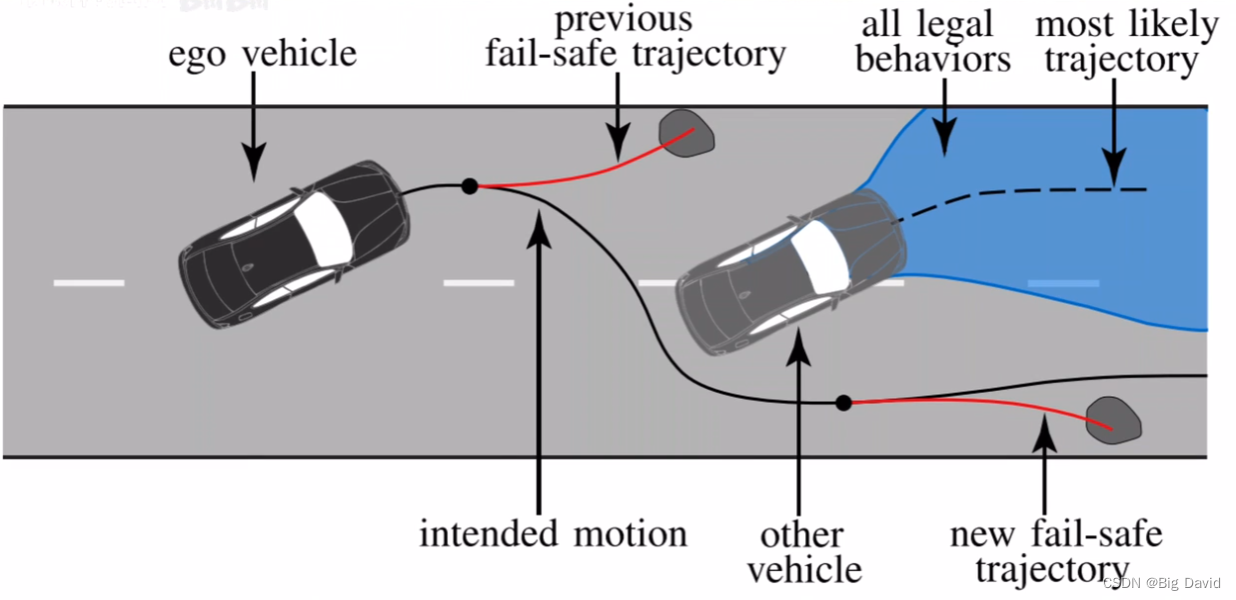
首先計算能否通過剎車這種方式得到一條安全軌跡,(讓速不讓道),當剎車有可能碰撞到行人或其他車輛時,則判斷變道是否會產生碰撞。如果能變道,則嘗試結合變道去尋找安全軌跡,如果上述方法行不通,代表沒有辦法留一手,無人車會執行之前生成的安全軌跡,不能留一手,只是代表無人車無法保證極端情況下自身的安全,不代表無人車一定會卷入交通事故
運動規劃的數學概念
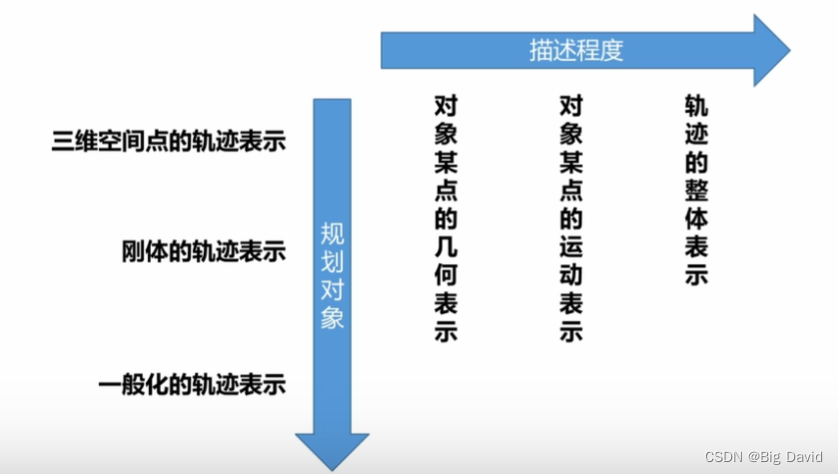
三維空間點的軌跡表示
三維空間點的軌跡表示
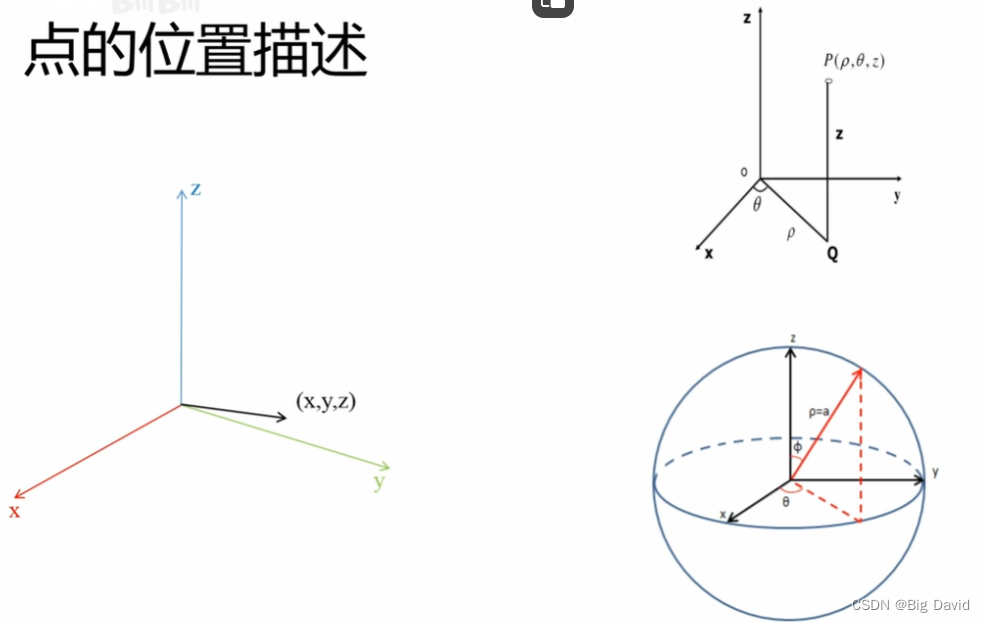
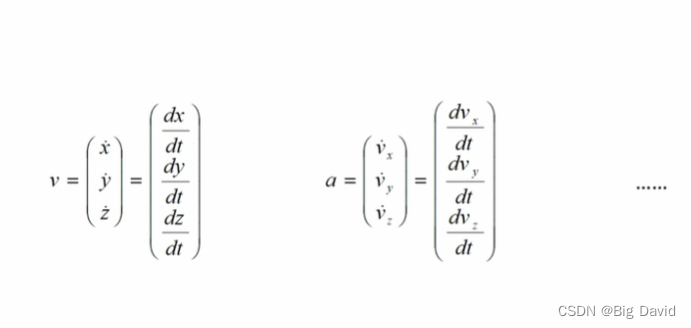
點的運動描述
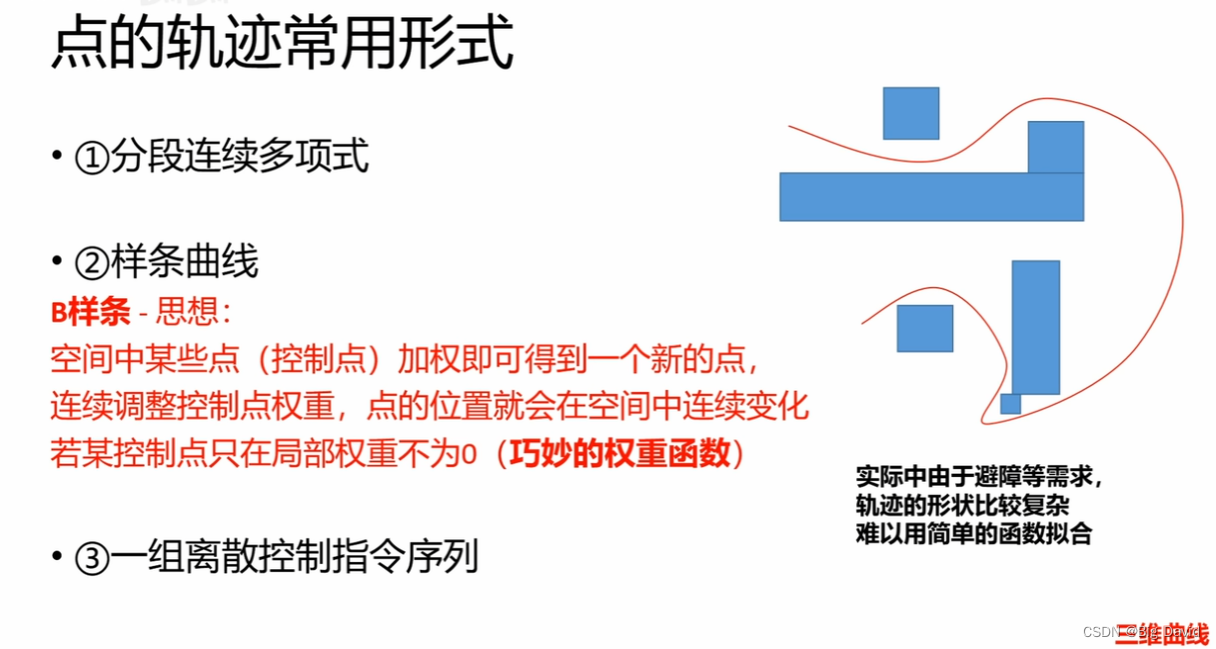
點的軌跡常用形式
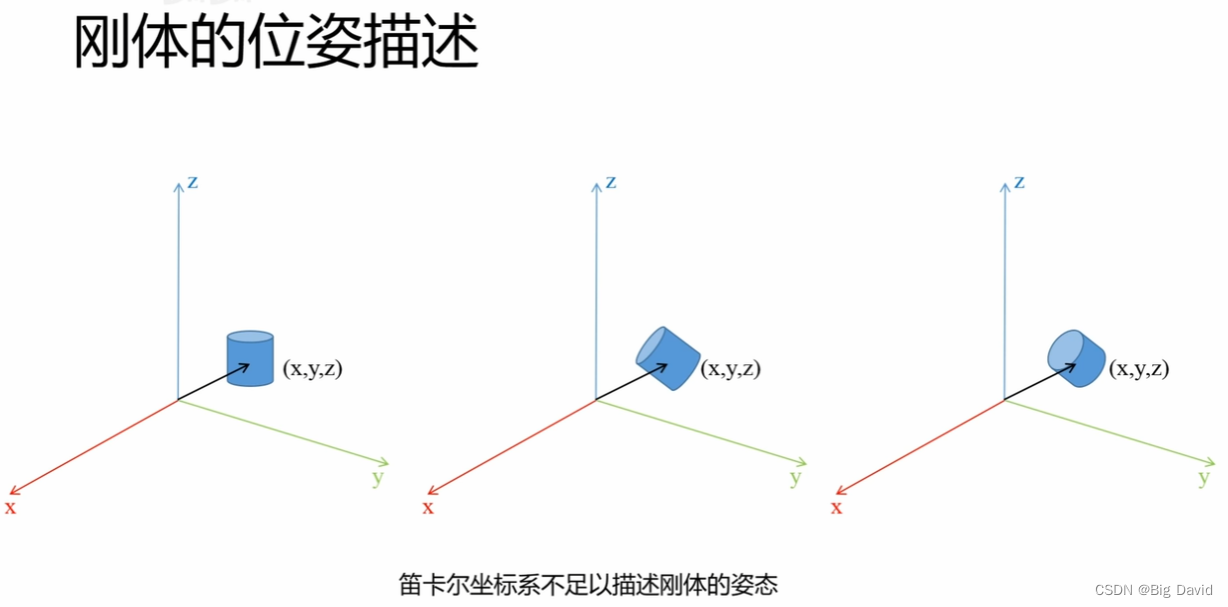
剛體的軌跡表示
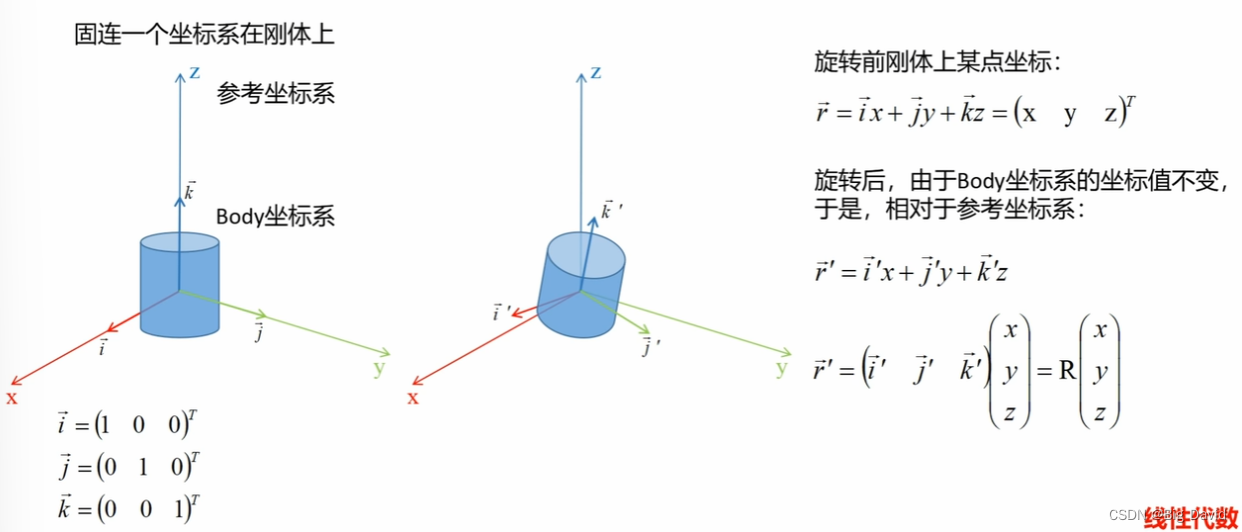
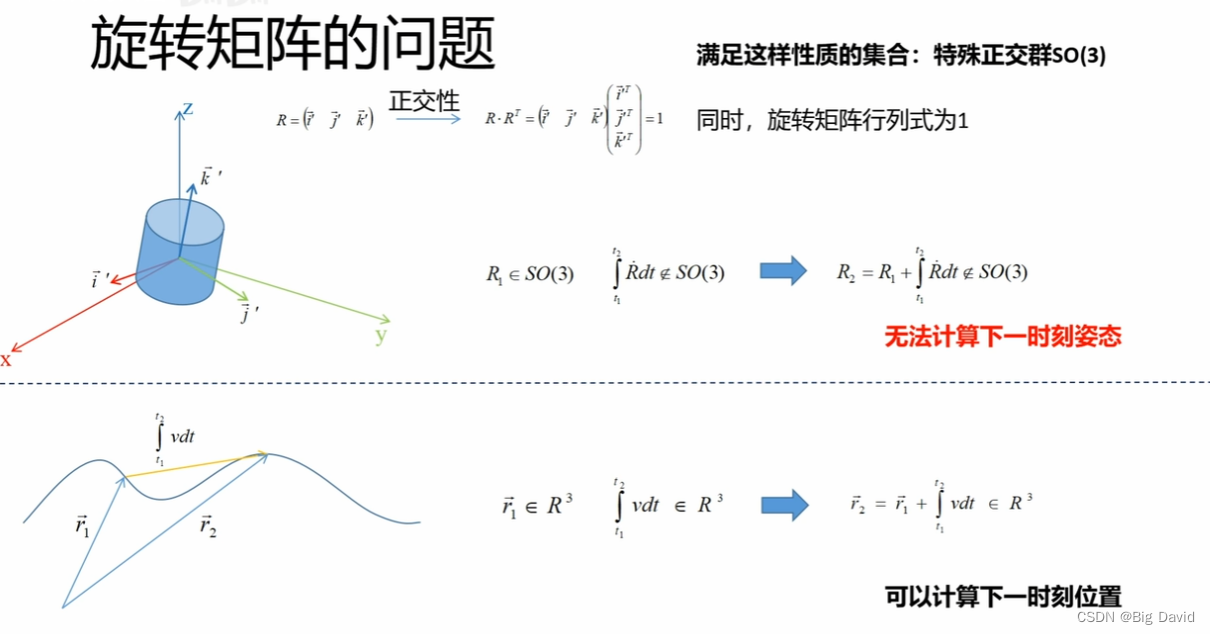
旋轉-矩陣表示
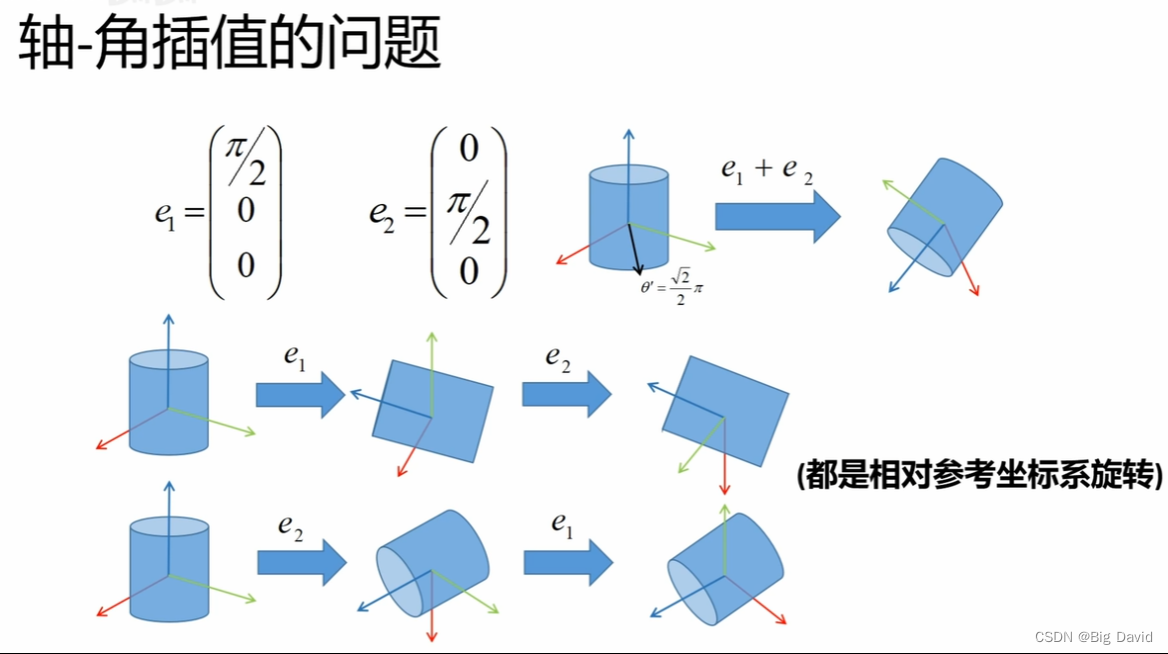
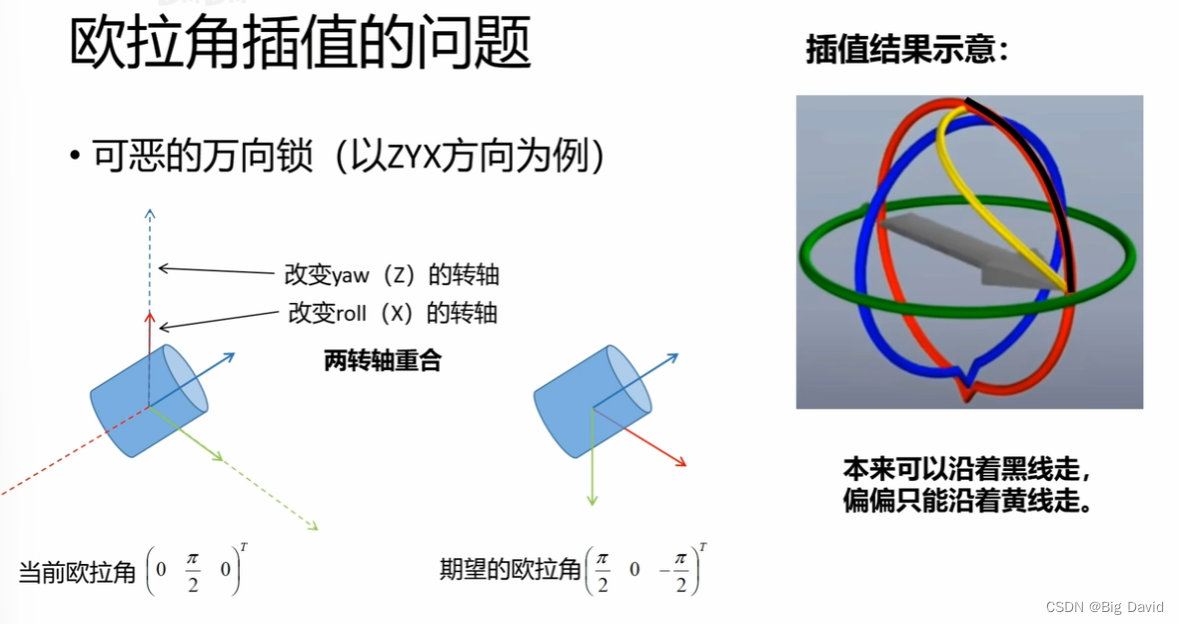
旋轉-歐拉角表示
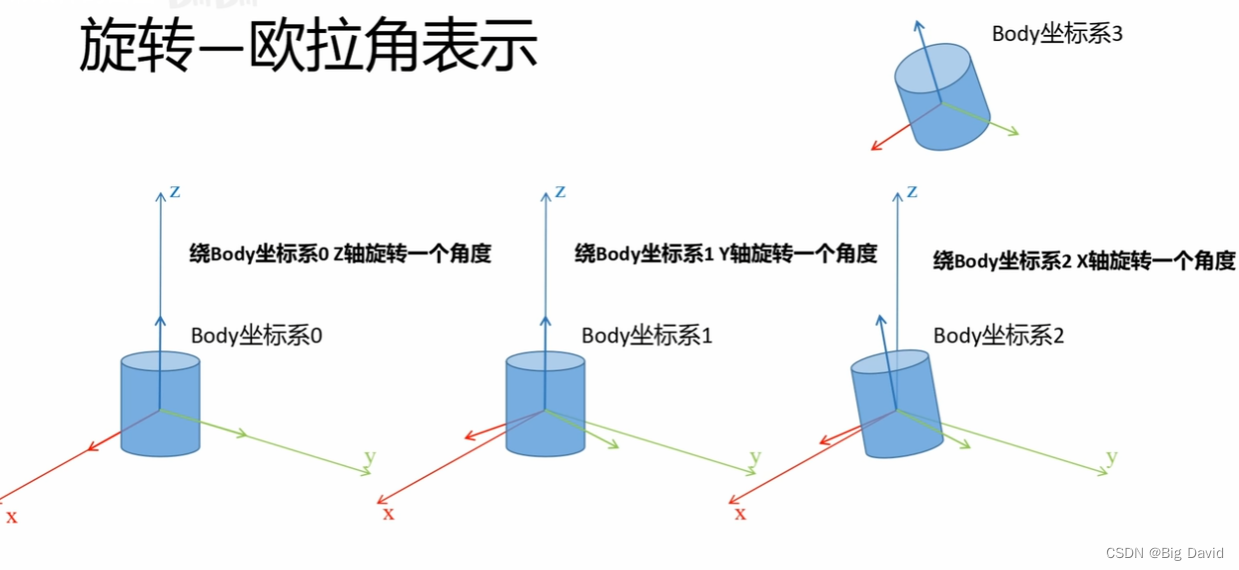
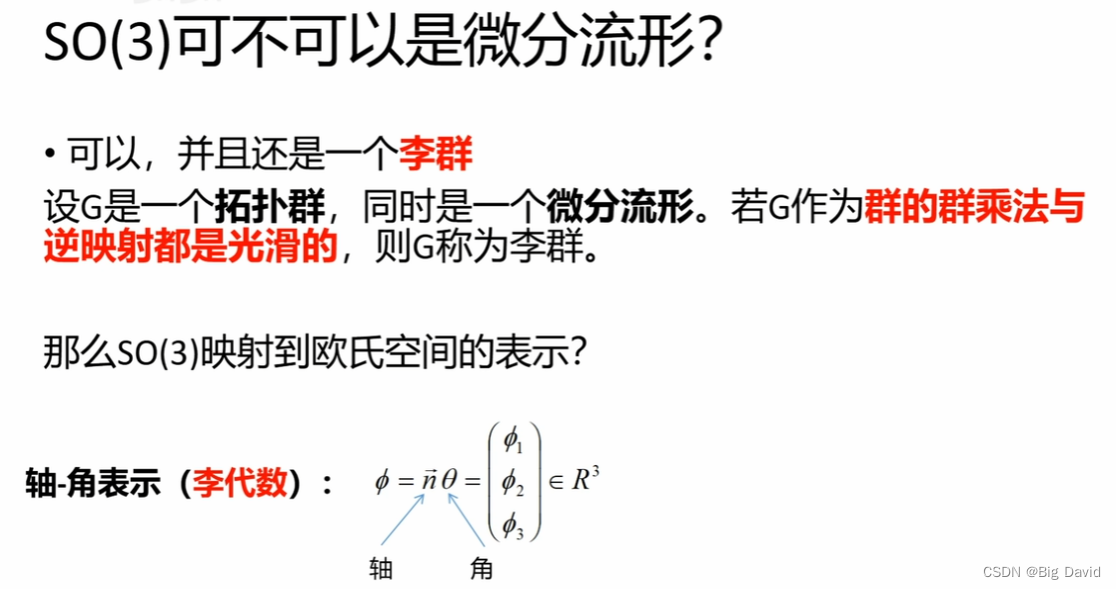
任何一個旋轉都可以看作是,繞著某一個軸,旋轉一定的角度
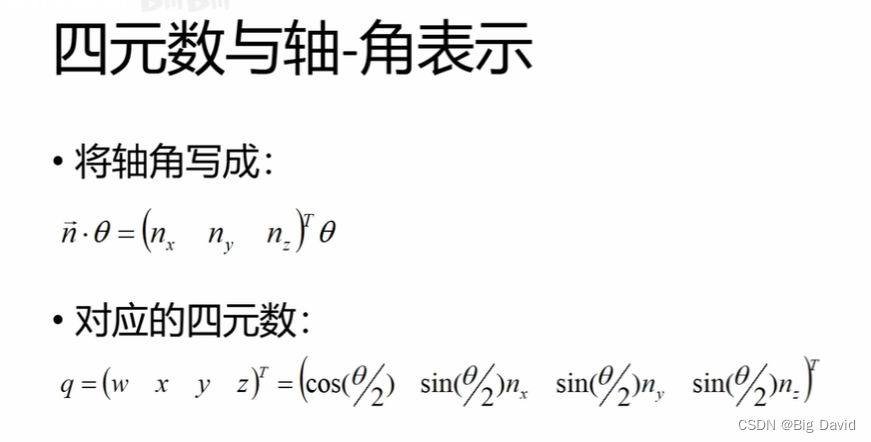
旋轉-四元數表示
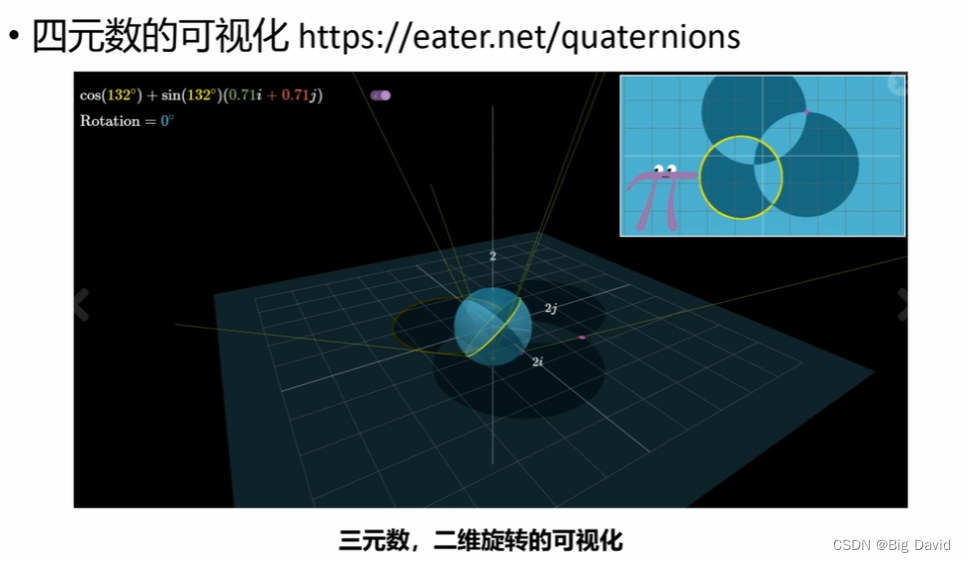
旋轉運動描述
四元數可以實現兩個定向之間的平滑插值
一般化的軌跡表示
Path Planning: 規劃處一條可行的路,這條路包含了位置,姿態,曲率信息。Motion Planning: 先做path planning, 然后為path planning規劃的路設計各個點合適的速度或者還包括加速度,然后選擇合適的controller,去做橫向以及縱向的跟隨。簡單的說,Motion Planning = Path Planning + Path Tracking
)
)









![LeetCode [簡單] 283. 移動零](http://pic.xiahunao.cn/LeetCode [簡單] 283. 移動零)

)




與SimaPro碳足跡分析)
