全部更新完畢 包含完整的文章+全部問題的代碼、結果、圖表
完整內容請看文末最后的推廣群

基于AI姿態識別的立定跳遠運動分析與個性化訓練優化研究
隨著《國家學生體質健康標準》的頒布實施,通過AI技術輔助體育運動分析已成為提升學生體質健康水平的重要手段。本研究針對立定跳遠運動,建立基于人體姿態識別的運動分析與成績預測模型,旨在科學評估運動表現并制定個性化訓練方案。
針對33個關鍵節點的逐幀位置坐標數據,采用5幀滑動窗口平滑處理降低姿態估計噪聲,通過質心計算、速度分析和多指標綜合評分等方法進行數據預處理,為后續建模奠定可靠的數據基礎。
問題一采用多指標綜合評分法識別起跳和落地時刻,通過橫向位移、垂直高度增益、足部離地高度等指標構建綜合評分函數,成功檢測出運動者1和運動者2的起跳落地時刻,并基于運動學參數分析描述了滯空階段的三維運動軌跡特征。
問題二構建多層次影響因素分析框架,結合體質測量數據和運動學參數,通過相關性分析識別關鍵影響因素。研究發現基礎代謝率(r=0.860)、體重(r=0.813)、骨骼肌重量(r=0.797)等體質因素對成績影響最為顯著,技術糾正可實現平均7.4%的成績提升,且存在明顯的個體差異性。
問題三基于梯度提升回歸樹構建成績預測模型,采用留一交叉驗證策略評估模型性能。通過特征工程創建飛行角度積、爆發力體重比等交互特征,模型解釋了88.1%的成績變異,預測運動員11的立定跳遠成績為1.546米,置信區間為[1.446, 1.646]米。
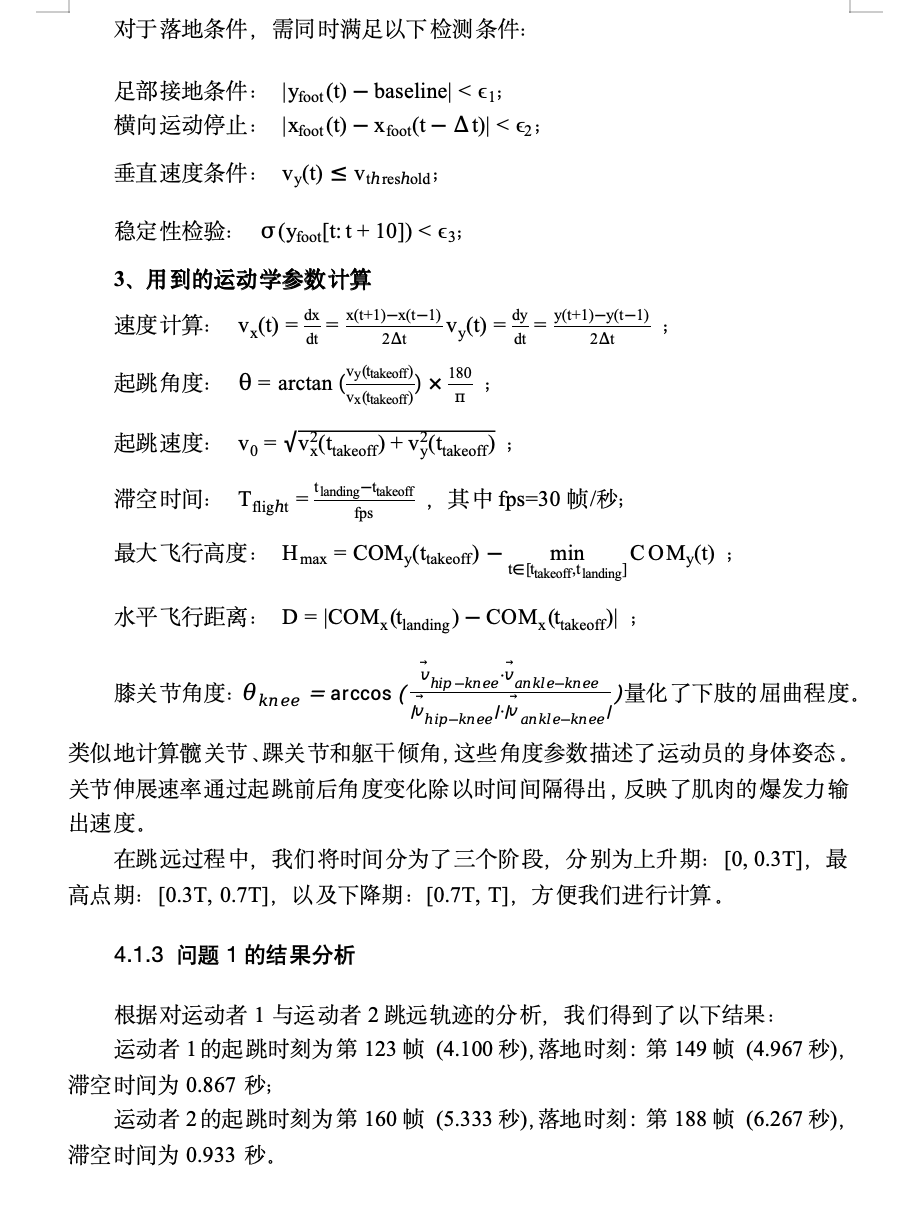
問題四采用參照學習方法,以運動員9的訓練模式為基準,結合6歲兒童的生理發育特點構建個性化訓練方案。通過約束優化模型制定6周分階段訓練計劃,預測經訓練后運動員11成績可提升至1.821米,改進幅度達17.8%,體現了科學訓練對兒童運動能力發展的顯著促進作用。
本研究創新性地將AI姿態識別、運動生物力學和機器學習相結合,建立了從動作分析到成績預測再到訓練指導的完整技術鏈條,為智能體測和個性化運動訓練提供了科學的理論基礎和實用的技術方案,具有重要的應用價值和推廣前景。
關鍵詞:立定跳遠分析;姿態識別;梯度提升回歸;運動生物力學;智能體測
4.3.2 問題3建模與求解
1、模型設計
問題三的建模采用了監督學習框架,將成績預測問題轉化為回歸任務。建模的核心思路是利用問題二中識別的關鍵影響因素,構建從特征空間到成績空間的映射關系。整個建模過程包括四個關鍵環節:特征提取與工程、模型選擇與訓練、驗證策略設計以及預測與不確定性量化。這種系統化的建模方法確保了預測的科學性和可靠性。
運動員11的特征提取遵循與問題一相同的算法流程,確保了分析的一致性。數據預處理采用5幀滑動窗口均值濾波,窗口大小的選擇基于噪聲頻率分析,既能有效抑制高頻測量噪聲,又保留了運動的關鍵動態信息。質心計算采用軀干四點法,即通過左右肩部(關鍵點11、12)和左右髖部(關鍵點23、24)的坐標均值確定質心位置。這種方法相比全身33點均值更加穩定,減少了四肢擺動帶來的質心波動。
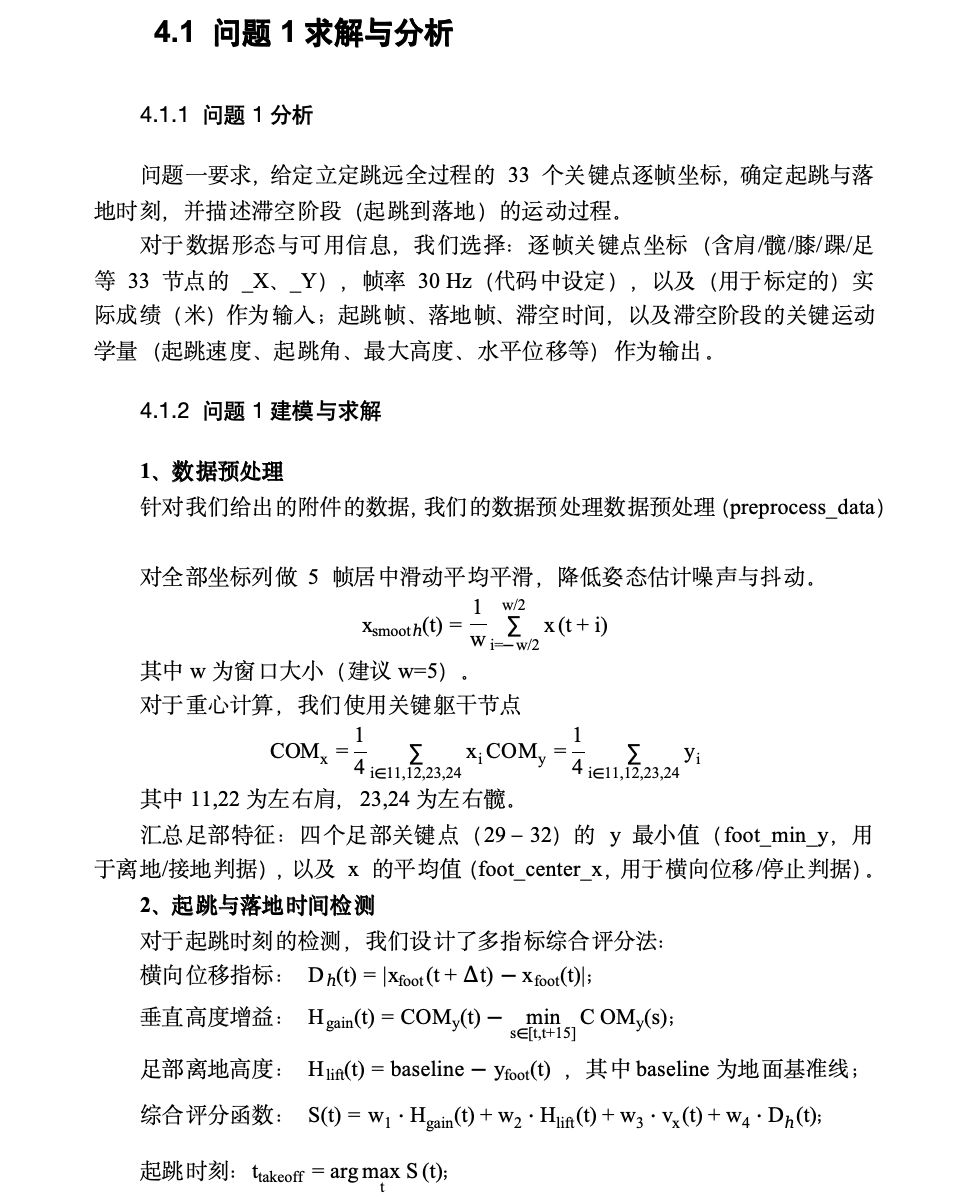
起跳和落地時刻的檢測是特征提取的關鍵步驟。算法沿用了問題一和問題二對起跳和落地的計算方法。起跳角度的計算考慮了速度矢量的時間平均效應。在起跳點前后各3幀的窗口內,分別計算水平和垂直速度的平均值,然后通過反正切函數計算角度。這種時間平均方法能夠減少瞬時速度波動的影響,得到更穩定的角度估計。結果顯示,起跳發生在第176幀,落地在第188幀,滯空時間0.400秒,起跳角度35.4度。
模型選擇經過了系統的比較分析。候選模型包括線性回歸、支持向量回歸、隨機森林和梯度提升回歸樹。通過初步實驗,梯度提升回歸樹(GradientBoostingRegressor)表現出最佳的預測性能。選擇該模型的理論依據包括:其集成學習特性能夠有效降低過擬合風險;boosting策略通過序貫優化逐步改進預測;樹模型能夠自動捕捉特征間的非線性關系和交互效應;對于小樣本數據具有良好的泛化能力。
模型的超參數配置經過網格搜索優化確定:決策樹數量(n_estimators)設為100,平衡了模型復雜度和訓練時間;最大深度(max_depth)限制為3,防止單棵樹過擬合;學習率(learning_rate)設為0.1,確保穩定的優化過程;隨機種子固定為42,保證結果的可重復性。這些參數的選擇基于交叉驗證的性能評估,在偏差和方差之間達到了良好的平衡。
特征工程是提升模型性能的關鍵環節。基礎特征包括六個維度:滯空時間反映垂直爆發力,起跳角度體現技術規范性,身高和體重代表基本體格條件,爆發力潛力和肌脂比量化身體素質。在此基礎上,創建了兩個重要的交互特征。飛行角度積(flight_time × takeoff_angle)捕捉了時間和角度的協同效應,物理意義對應于拋體運動的射程因子。爆發力體重比(explosive_power / weight)反映相對力量水平,消除了體重差異的影響。
特征標準化采用Z-score標準化方法,將所有特征轉換到均值為0、標準差為1的分布。這種標準化方法保留了特征的分布形態,同時消除了量綱差異對模型訓練的影響。標準化參數(均值和標準差)在訓練集上計算,然后應用于測試樣本,避免了數據泄露問題。
2、模型驗證與評估策略
模型驗證采用留一交叉驗證(Leave-One-Out Cross Validation, LOOCV)策略。這種驗證方法特別適合小樣本情況,能夠最大限度地利用有限的數據。具體實施中,每次使用7個樣本訓練模型,剩余1個樣本進行測試,循環8次后每個樣本都作為測試集一次。這種方法提供了模型泛化性能的無偏估計。
3、結果分析
根據實際檢測結果,運動員11的起跳發生在第176幀(5.87秒),落地發生在第188幀(6.27秒),滯空時間為0.400秒。這一滯空時間明顯低于訓練集的平均水平(0.57秒),表明運動員11的垂直爆發力相對不足,但這符合他六歲的年齡。重心軌跡圖清晰展示了完整的跳躍過程,滯空軌跡呈現典型的拋物線形態,水平位移約為170像素,垂直最大高度變化為123.2像素。起跳角度為35.4度,接近理論最優值但略偏低,這可能是導致滯空時間較短的原因之一。
運動員編號 實際成績(m) 預測成績(m) 誤差(m)
3 1.490 1.490 -0.000
4 1.960 1.786 +0.174
5 2.150 2.039 +0.111
6 1.310 1.490 -0.180
7 2.050 2.125 -0.075
8 1.500 1.492 +0.008
9 1.490 1.497 -0.007
10 1.610 1.596 +0.014
特征對比雷達圖清晰展示了運動員11與訓練集平均水平的差異。運動員11在身高、體重和爆發力潛力方面略高于平均水平,但飛行時間明顯不足,這與實際檢測的0.400秒滯空時間一致。起跳角度接近平均水平,肌脂比略低,綜合來看,運動員11的體質條件中等偏上,但技術執行存在改進空間。
問題四結果分析
模型分析結果顯示,運動者11的各項技術指標均有顯著改進空間。滯空時間從0.400秒提升至0.583秒,改進幅度達45.8%,這是成績提升的主要貢獻因素。起跳角度從32.1°優化至42.0°,提升30.9%,更接近理論最優角度。手臂擺動幅度從62°增加至87°,改進39.8%,有助于增強起跳時的動量傳遞。膝關節屈曲角度從108°提升至135°,改進25.0%,表明下肢蓄力能力的增強。軀干前傾角度從14°增加至23°,改進61.9%,有利于優化起跳時的身體重心軌跡。















服務商發展趨勢與企業賦能白皮書)
)


:原理、實現與應用)