ROS機器人云實踐作品申報書
ROS機器人云實踐設計
一、項目基本信息
項目名稱:基于ROS的移動機器人云實踐平臺設計與應用
申報單位:[具體單位名稱]
項目負責人:[具體參與人員]
申報日期:[填寫日期]
二、項目背景與目標
項目背景:
隨著機器人技術的飛速發展,ROS(Robot Operating System)已成為機器人領域的標準軟件框架,廣泛應用于學術研究、工業自動化及智能制造等多個領域。然而,傳統ROS實驗環境受限于硬件資源、軟件配置及物理空間,難以滿足大規模、跨地域的教學與實踐需求。
為此,本項目設計了基于ROS的移動機器人云實踐平臺,旨在通過云計算技術,提供靈活、高效、可擴展的機器人實踐環境,打破地域與資源限制,促進機器人技術的普及與創新。
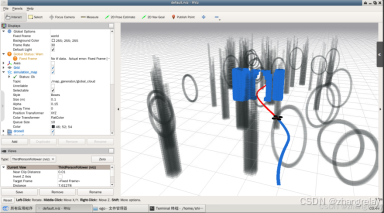
開源空中機器人案例ego擴展到云實踐平臺
項目目標:
- 構建一個基于云的ROS機器人實踐平臺,支持遠程訪問與操作,支持遠程共享協作。
- 提供豐富的機器人模型庫、傳感器模擬及算法工具包,降低機器人學習研究和開發門檻。
- 實現教學與實踐的無縫對接,提升學生及研究人員的機器人編程與系統設計能力。
- 推動ROS機器人技術的廣泛應用,促進產學研深度融合。
三、科學性及技術基礎
技術基礎:
本項目基于成熟的云計算技術、ROS機器人操作系統及Gazebo仿真平臺,確保了技術的先進性與可靠性。
云計算技術提供了彈性的計算資源,支持多用戶并發訪問;ROS作為機器人領域的標準框架,提供了豐富的功能包與工具;Gazebo則是一個強大的3D仿真環境,能夠模擬復雜的物理場景與機器人行為。同時,平臺還支持多種仿真平臺共存,如CoppeliaSim仿真軟件,為用戶提供更多選擇。
系統架構:
平臺采用微服務架構,將不同功能模塊解耦,提高了系統的可維護性與擴展性。
主要包括用戶管理模塊、資源調度模塊、仿真環境模塊、算法庫模塊及數據分析模塊等。各模塊間通過API進行通信,實現了高效的數據交換與服務調用。
算法與模型:
平臺集成了多種先進的機器人算法與模型,如SLAM(同步定位與地圖構建)、路徑規劃、避障算法等,這些算法均基于ROS實現,并經過了大量實驗驗證,確保了其科學性與有效性。
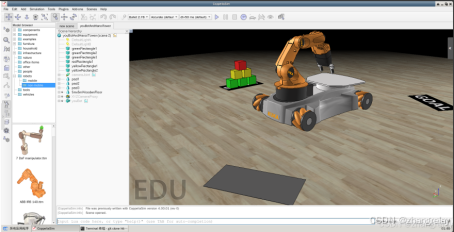
CoppeliaSim仿真擴展到云實踐平臺
項目已取得發明專利3項、軟件著作權1項。
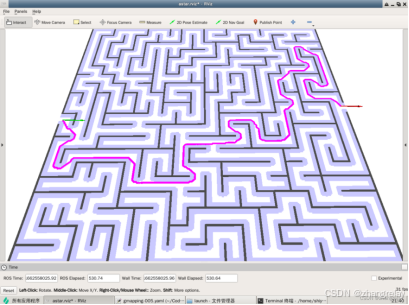
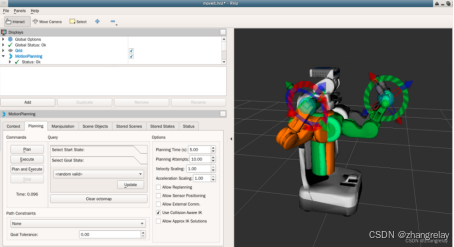
云實踐平臺中路徑規劃算法演示
四、項目特色與創新點
- 云實踐環境:
- 靈活性:用戶可根據需求靈活選擇計算資源與仿真環境,無需擔心硬件限制。
- 可擴展性:平臺支持多用戶并發訪問,能夠根據用戶數量動態調整資源分配。
- 易用性:提供直觀的用戶界面與詳細的操作指南,降低了ROS機器人的學習門檻。
- 豐富的資源庫:
- 機器人模型庫:包含多種類型的機器人模型,如移動機器人、機械臂、無人機等,支持用戶自定義模型導入。
- 傳感器模擬:模擬多種傳感器數據,如激光雷達、攝像頭、IMU等,為機器人感知環境提供真實數據。
- 算法工具包:集成多種ROS算法包,如導航、視覺處理、語音識別等,支持用戶快速開發與應用。
- 跨語言基礎復習與實戰融合:
- 整合了Python與C++兩種主流編程語言的基礎復習模塊,用戶可以在同一平臺上回顧兩種語言的核心語法與編程范式,并立即將所學應用于機器人控制、傳感器數據處理等實戰場景中。
- 虛擬仿真與現實世界無縫對接:
- 平臺內置的Gazebo仿真環境能夠高度模擬現實世界中的物理現象與機器人行為,仿真結果可直接映射到實體機器人上,實現從虛擬到現實的平滑過渡。
- 移動機器人算法綜合測評體系:
- 構建了一套全面的算法測評體系,針對移動機器人領域的核心算法,如SLAM、路徑規劃、機器視覺等,提供標準化的測試場景與數據集,允許用戶自定義測試條件,以評估算法在不同環境下的性能表現。
- 編程、設計與實踐的深度融合:
- 強調編程技能、機器人設計理念與實踐操作能力的深度融合,用戶在學習ROS編程的同時,可以參與到移動機器人的整體設計流程中,全程體驗機器人開發的完整周期。
- 技術創新與實踐應用的閉環生態:
- 構建了一個從技術創新到實踐應用的閉環生態系統,鼓勵用戶基于ROS進行技術創新,同時提供了將這些創新成果快速轉化為實際應用場景的途徑。
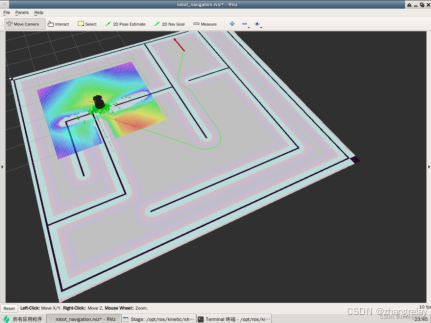
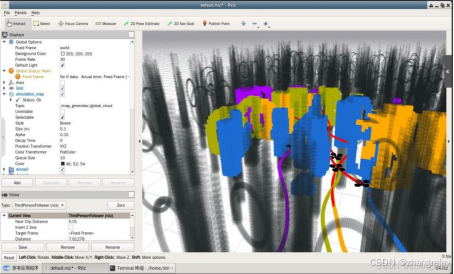
云實踐平臺中移動機器人導航演示
云實踐平臺中各類機器人演示
五、教學效果與成果
- 提升學生能力:
- 學生通過實踐平臺,熟練掌握了ROS編程技巧,提升了代碼編寫與調試能力。
- 學生能夠設計并實現復雜的機器人系統,包括硬件選型、軟件架構、算法集成等。
- 面對仿真環境中的各種挑戰,學生能夠運用所學知識,獨立解決問題。
- 學生在相關比賽中獲得了高層次獎項,如2022年微軟MVP和2024年國賽一等獎。
- 促進教學創新:
- 采用項目驅動、案例分析等教學方法,激發學生的學習興趣與主動性。
- 提供豐富的教學資源,如視頻教程、實驗指南、項目案例等,支持教師開展多樣化教學活動。
- 建立多元化的評估體系,全面評價學生的學習過程與成果,促進教學質量的提升。
- 教師們獲得了教學獎項,同時提升了新教師的教學能力。
- 增強實踐體驗:
- 仿真環境高度接近真實世界,為學生提供了真實的機器人操作體驗。
- 支持多人協作與在線交流,增強了學生的學習互動性與參與感。
- 建立及時的反饋機制,幫助學生及時了解自己的學習進度與問題,調整學習策略。
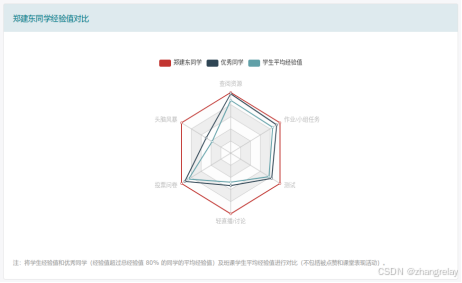
云實踐平臺中學生評估體系
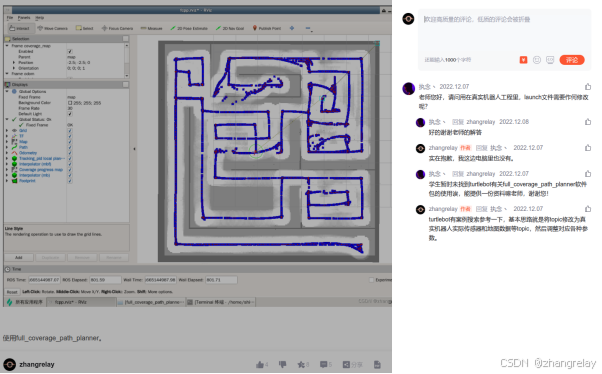
云實踐平臺中在線社區答疑
六、實施情況與推廣應用
- 平臺建設:
- 選擇成熟的云計算服務提供商,如藍橋云課,確保平臺的穩定性與可靠性。
- 采用敏捷開發方法,分階段完成平臺功能開發,包括用戶管理、資源調度、仿真環境等核心模塊。
- 進行多輪測試,包括功能測試、性能測試、安全測試等,確保平臺的質量與用戶體驗。
- 自2017年上線以來,保持持續更新維護。
- 課程集成:
- 與多門機器人相關課程進行深度集成,設計實驗項目與案例分析,確保教學內容與平臺功能的緊密結合。
- 為教師提供平臺使用培訓,包括操作指南、教學案例、項目實踐等,提升教師的教學能力。
- 組織學生參與平臺實踐項目,提供必要的指導與支持,確保學生能夠順利完成實踐任務。
- 推廣與應用:
- 在學校內部進行平臺推廣,組織宣講會、工作坊等活動,吸引學生參與平臺實踐。
- 與其他高校建立合作關系,共享平臺資源,開展聯合教學與實踐活動。
- 與機器人企業建立合作關系,將平臺應用于產品研發、員工培訓等領域,推動產學研深度融合。
支持多人協作共同解決困難提升效率

平臺建設包括社區和云實踐平臺等
參與機器人專業教師系列培訓分享
七、推廣應用前景
- 教育領域:
- 服務高校教學,成為高校機器人相關課程的重要教學工具,提升教學質量與效果。
- 服務職業培訓,為機器人行業提供職業培訓服務,培養更多具備ROS機器人技術的專業人才。
- 服務在線教育,結合在線教育平臺,提供遠程ROS機器人課程與實踐機會,擴大教育覆蓋面。
- 工業領域:
- 面向產品研發,支持機器人企業進行產品研發與測試,縮短研發周期,降低研發成本。
- 面向員工培訓,為企業員工提供ROS機器人技術培訓,提升員工的技能水平與創新能力。
- 面向智能制造,結合智能制造技術,推動工業自動化與智能化發展,提升生產效率與產品質量。
- 科研領域:
- 促進學術研究,為科研人員提供ROS機器人研究平臺,支持機器人算法、傳感器技術、人機交互等領域的學術研究。
- 促進產學研項目合作,推動ROS機器人技術的創新與應用,提升我國機器人技術的國際競爭力。
- 社會影響:
- 推動技術普及,通過平臺推廣與應用,提升公眾對ROS機器人技術的認知與興趣,推動機器人技術的普及與發展。
- 構建創新生態,構建ROS機器人技術創新生態,吸引更多人才與資源投入機器人領域,推動機器人產業的繁榮與發展。

全國ROS培訓基地建設
八、結論與展望
基于ROS的移動機器人云實踐平臺設計項目,通過云計算技術、ROS機器人操作系統及Gazebo仿真平臺的深度融合,構建了一個靈活、高效、可擴展的機器人實踐環境。
該平臺不僅提升了學生的機器人編程與系統設計能力,還促進了教學與實踐的無縫對接,為機器人技術的普及與創新提供了有力支持。未來,我們將繼續優化平臺功能,拓展應用領域,推動ROS機器人技術的廣泛應用與深入發展,為我國機器人產業的繁榮與發展貢獻力量。
申報單位(蓋章):
項目負責人(簽字):
日期:[填寫日期]
基于ROS的移動機器人云實踐平臺:創新設計與應用成果
摘要
隨著機器人技術的飛速發展,ROS(Robot Operating System)已成為機器人領域的標準軟件框架。
然而,傳統ROS實驗環境受限于硬件資源、軟件配置及物理空間,難以滿足大規模、跨地域的教學與實踐需求。為此,我們設計了基于ROS的移動機器人云實踐平臺,通過云計算技術提供靈活、高效、可擴展的機器人實踐環境,旨在打破地域與資源限制,促進機器人技術的普及與創新。本文將全面介紹該平臺的創新設計、技術實現、應用成果及未來展望。
一、項目背景與目標
項目背景
機器人技術的快速發展對實踐環境提出了更高的要求。
傳統ROS實驗環境由于硬件資源、軟件配置及物理空間的限制,難以滿足大規模、跨地域的教學與實踐需求。云計算技術的興起為解決這一問題提供了新的思路。
項目目標
本項目旨在構建一個基于云的ROS機器人實踐平臺,支持遠程訪問與操作、遠程共享協作等功能。
平臺提供豐富的機器人模型庫、傳感器模擬及算法工具包,接入專用智能大模型工具,降低機器人學習研究和開發門檻。同時,實現教學與實踐的無縫對接,提升學生及研究人員的機器人編程與系統設計能力,推動ROS機器人技術的廣泛應用,促進產學研深度融合。
二、平臺的科學性
技術基礎
本項目基于成熟的云計算技術、ROS機器人操作系統及Gazebo仿真平臺。
云計算技術提供了彈性的計算資源,支持多用戶并發訪問;ROS作為機器人領域的標準框架,提供了豐富的功能包與工具;Gazebo則是一個強大的3D仿真環境,能夠模擬復雜的物理場景與機器人行為。此外,平臺還支持多種仿真平臺共存,如CoppeliaSim仿真軟件,為用戶提供更多選擇。
系統架構
平臺采用微服務架構,將不同功能模塊解耦,提高了系統的可維護性與擴展性。
主要包括用戶管理模塊、資源調度模塊、仿真環境模塊、算法庫模塊及數據分析模塊等。各模塊間通過API進行通信,實現了高效的數據交換與服務調用。
算法與模型
平臺集成了多種先進的機器人算法與模型,如SLAM(同步定位與地圖構建)、路徑規劃、避障算法等。
這些算法均基于ROS實現,并經過了大量實驗驗證,確保了其科學性與有效性。平臺已取得發明專利3項、軟件著作權1項,進一步證明了其技術實力。
三、平臺的創新設計
跨語言基礎復習與實戰融合
平臺突破性地整合了Python與C++兩種主流編程語言的基礎復習模塊。
用戶不僅可以在同一平臺上回顧兩種語言的核心語法與編程范式,還能立即將所學應用于機器人控制、傳感器數據處理等實戰場景中。這種跨語言的學習與實踐方式,不僅提升了學習者的編程靈活性,還促進了他們對不同語言在機器人領域應用優勢的深刻理解,為解決復雜機器人問題提供了多樣化的技術路徑。
虛擬仿真與現實世界無縫對接
平臺內置的Gazebo仿真環境能夠高度模擬現實世界中的物理現象與機器人行為,使得用戶能夠在無實體機器人硬件的情況下,進行導航、路徑規劃、避障等高級功能的虛擬仿真實驗。
更重要的是,這些仿真結果可直接映射到實體機器人上,實現從虛擬到現實的平滑過渡。這種無縫對接機制極大地降低了機器人實驗的門檻與成本,加速了機器人技術的研發與迭代速度。
移動機器人算法綜合測評體系
針對移動機器人領域的核心算法,如SLAM、路徑規劃、機器視覺等,平臺構建了一套全面的算法測評體系。
該體系不僅提供了標準化的測試場景與數據集,還允許用戶自定義測試條件,以評估算法在不同環境下的性能表現。通過直觀的可視化報告與數據分析工具,用戶能夠快速識別算法瓶頸,優化算法參數,甚至創新算法設計,從而推動移動機器人技術的持續進步。
編程、設計與實踐的深度融合
平臺強調編程技能、機器人設計理念與實踐操作能力的深度融合。
用戶在學習ROS編程的同時,可以參與到移動機器人的整體設計流程中,從需求分析、系統架構設計、硬件選型到軟件實現,全程體驗機器人開發的完整周期。此外,平臺還提供了豐富的實踐項目案例,如自主導航機器人、環境監測無人機等,引導用戶將理論知識轉化為實際解決方案,培養其解決復雜工程問題的能力。
技術創新與實踐應用的閉環生態
平臺構建了一個從技術創新到實踐應用的閉環生態系統。
一方面,它鼓勵用戶基于ROS進行技術創新,如開發新的算法、傳感器或機器人模型;另一方面,它提供了將這些創新成果快速轉化為實際應用場景的途徑,如通過云服務部署機器人應用、參與行業挑戰賽等。這種閉環生態不僅激發了用戶的創新活力,還促進了機器人技術的產業化進程,為機器人行業的持續發展注入了新的動力。
四、應用成果與影響
科學研究支撐
平臺集成的多種先進機器人算法與模型為科學研究提供了有力支撐。
通過平臺,研究人員可以方便地進行算法測試與優化,加速科研進程。目前,平臺已支撐多項科研項目,取得顯著研究成果。
獲獎與認證
學生和教師應用云實踐平臺參與各類機器人競賽與教學競賽,獲得多項國家級和行業級證書。
這些榮譽不僅證明了平臺的教學效果,也提升了學校和團隊的知名度。同時,團隊老師還獲得了多家行業機構的聘書,積極推進云實踐平臺的普及與應用。
媒體報道與行業影響
平臺的建設成果得到了媒體的廣泛關注和報道。
例如,東北大學公眾號對機器人競賽指數進行了報道,常熟理工學院獲得了A+評級。此外,團隊還參加了余姚舉辦的第五屆中國機器人峰會,并做了《為了更好的實踐----論ROS教學培訓》的演講分享,進一步擴大了平臺的影響力。
社會影響與產學研融合
平臺通過推廣與應用,提升了公眾對ROS機器人技術的認知與興趣,推動了機器人技術的普及與發展。
同時,平臺還促進了產學研的深度融合,為機器人企業提供了產品研發與測試的支持,縮短了研發周期,降低了研發成本。此外,平臺還參與了全國ROS培訓基地建設,成為第一批ROS培訓基地,為培養更多ROS機器人技術專業人才做出了貢獻。
五、未來展望
基于ROS的移動機器人云實踐平臺設計項目通過云計算技術、ROS機器人操作系統及Gazebo仿真平臺的深度融合,構建了一個靈活、高效、可擴展的機器人實踐環境。
未來,我們將繼續優化平臺功能,拓展應用領域,推動ROS機器人技術的廣泛應用與深入發展。同時,我們還將加強與高校、企業及研究機構的合作,共同推動機器人技術的創新與發展,為我國機器人產業的繁榮與發展貢獻力量。
《基于ROS的移動機器人云實踐平臺創新設計與應用》項目構建了一個融合云計算、ROS機器人操作系統和Gazebo仿真的創新平臺。該平臺突破傳統實驗環境限制,提供彈性計算資源和多用戶并發支持,集成了SLAM、路徑規劃等先進算法,已獲3項發明專利。創新性地實現了跨語言學習、虛實仿真對接、算法測評體系等功能,支持從編程到實踐的全流程開發。應用成效顯著,學生獲國家級競賽獎項,支撐多項科研項目,并獲評全國首批ROS培訓基地。平臺將持續優化,推動ROS技術普及與產學研深度融合,助力我國機器人產業發展。

:激活函數)




 ret2dir詳細)










![[每周一更]-(第155期):深入Go反射機制:架構師視角下的動態力量與工程智慧](http://pic.xiahunao.cn/[每周一更]-(第155期):深入Go反射機制:架構師視角下的動態力量與工程智慧)
)
)