機器視覺系統是一種模擬人類視覺功能,通過光學裝置和非接觸式傳感器獲取圖像數據,并進行分析和處理,以實現對目標物體的識別、測量、檢測和定位等功能的智能化系統。其目的是讓機器能夠理解和解釋視覺信息,從而做出決策或執行任務。簡單來說,機器視覺是用機器代替人眼來做測量和判斷。
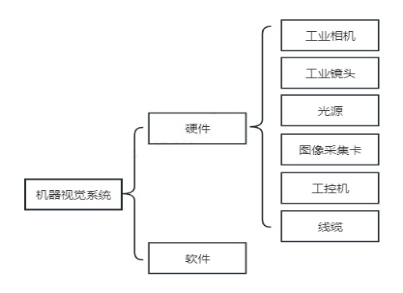
機器視覺系統
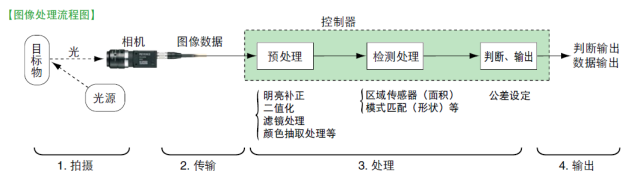
圖像處理流程
工業相機是機器視覺系統中的一個關鍵組件,其最本質的功能就是將光信號轉變成有序的電信號。
一、工業相機的工作原理
1.圖像采集:通過鏡頭收集被拍攝物體反射或透射的光線,將其聚焦在圖像傳感器上。
2.光電轉換:圖像傳感器(常見的有 CCD 和 CMOS)將光信號轉換為電信號。以 CMOS 傳感器為例,每個像素點都有一個感光二極管,光線照射時產生與光強成正比的電荷,進而被轉換為電壓信號。
3.信號處理:轉換后的電信號經過放大器進行放大,并通過模數轉換器(ADC)將模擬信號轉換為數字信號,這些數字信號經過處理后形成數字圖像數據,傳輸給計算機等設備進行后續分析。
二、工業相機的分類
按圖像傳感器類型:分為 CCD工業相機和 CMOS工業相機。
按輸出色彩:分為彩色工業相機和黑白(單色)工業相機。
按掃描方式:面陣工業相機和線陣工業相機。
按輸出信號方式分:模擬工業相機、數字工業相機。
按響應頻率范圍分:可見光(普通)相機、紅外相機、紫外相機等。
按照光譜波段數量來分,可分為高光譜相機和多光譜相機。
按照成像維度分:2D工業相機和3D工業相機
特殊工業相機:偏振工業相機。
三、工業相機的傳感器
圖像傳感器作為工業相機核心部件,其靶面的大小,往往直接關系到成像的質量。通常來講,圖像的成像質量與像素的大小成正比。這也就意味著,同樣大小的圖像傳感器,如果分辨率越高,那么像素尺寸就越小,其成像質量也就會越差。
工業上的1/2.3’CMOS傳感器,分辨率通常只在500萬像素級別,而 民用的1/2.3’CMOS傳感器,則分辨率可以做到1600萬像素甚至更高的級別。因此工業相機的成像質量往往要比民用的相機成像質量要好;同時,如果相同分辨率的相機,傳感器面積越大,則其單位像素的面積也越大,成像質量也會越好。同樣的500萬像素的相機,2/3’的傳感器成像質量就要好于1/2’的。
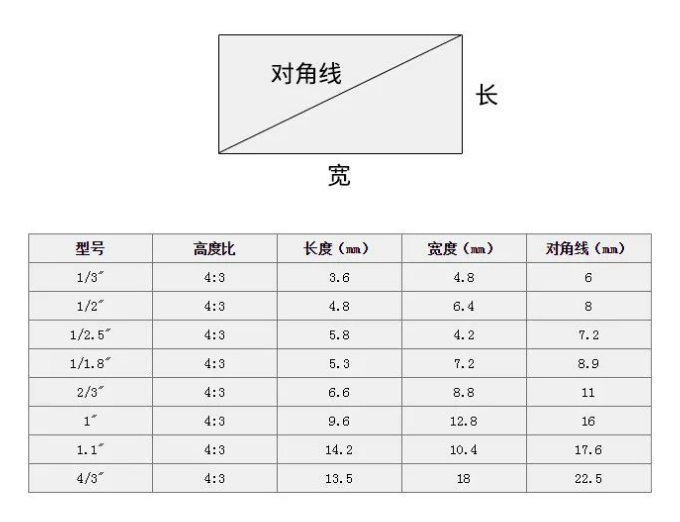
常見的傳感器尺寸
四、相機如何選型
1. 明確應用需求
檢測目標:尺寸、速度、精度、缺陷類型(如表面劃痕、尺寸測量等)。
環境條件:光照(自然光/人工光源)、溫度、振動、粉塵等。
輸出要求:是否需要實時分析、數據存儲或與其他設備(如PLC)通信。
2. 核心參數選型
(1) 分辨率
公式計算: 分辨率≥被測物尺寸/檢測精度×安全系數。例如:檢測10mm物體,要求0.05mm精度,需至少200萬像素(1600×1200)。
(2) 傳感器類型
全局快門(Global Shutter):適合高速運動物體(如流水線),避免拖影。
滾動快門(Rolling Shutter):靜態或低速場景,成本低。
傳感器尺寸:越大則通光量越高,但需匹配鏡頭像場。
(3) 幀率(FPS)
計算: 幀率≥產線速度/檢測步長(單幀視野)。例如:產線速度1m/s,每幀視野10mm,則至少需100FPS。
高速場景:選擇Camera Link或CoaXPress接口(如500FPS以上)。
(4) 像元尺寸
小像元(如1.4μm):高分辨率但低感光,需強光源。
大像元(如5.5μm):低照度表現好,適合弱光環境。
(5) 光譜響應
可見光(400-700nm):常規檢測。
近紅外(700-1000nm):穿透性檢測(如硅片內部缺陷)。
紫外或X光:特殊材料分析。
3. 接口選擇
接口類型 | 帶寬 | 傳輸距離 | 典型應用 |
|---|---|---|---|
USB3.0 | 400MB/s | <5m | 低成本、中低速檢測 |
GigE | 120MB/s | 100m | 遠距離、多相機同步 |
Camera Link | 850MB/s | 10m | 高速、高分辨率 |
CoaXPress | 6.25GB/s | 100m+ | 超高速、4K/8K成像 |
5GigE/10GigE | 500MB/s~1GB/s | 100m | 平衡速度與距離需求 |
4. 鏡頭選型匹配
焦距計算: 焦距=工作距離×傳感器尺寸/視野(FOV)
鏡頭類型: 遠心鏡頭:高精度尺寸測量(無透視誤差)。
FA鏡頭:通用場景,成本低。
變焦鏡頭:視野需頻繁調整的場景。
5. 其他關鍵因素
動態范圍(HDR):高對比度場景(如焊接檢測)需100dB以上。
觸發模式:硬件觸發(光電傳感器同步)或軟件觸發。
防護等級:IP67(防塵防水)適用于戶外或惡劣環境。
軟件支持:兼容Halcon、LabVIEW或定制SDK開發。
五、相機選型注意事項
1、相機類型
對于靜止檢測或者一般低速的檢測,優先考慮面陣相機,對于大幅面高速運動或者滾軸等運動的特殊應用考慮使用線陣相機。根據檢測的速度,選擇相機的幀率一定要大于物體運動的速度,一定要在相機的曝光和傳輸時間內完成。而在實際檢測中實現同樣的目的可以有多種不同的解決辦法,相機的選擇也就有了更多空間。
2、相機幀率
相機的幀率決定著設備的測量效率,如相機的幀率是30FPS,則每秒鐘最多拍攝30次。通常來說,相機的分辨率越低,同樣的接口,幀率也會越高;而分辨率越高,幀率也會越低。幀率*分辨率≤總線帶寬,即在接口一定(總線帶寬已經確定),分辨率一定時,幀率也是有其最大值的。即要想相機的分辨率快,又要想相機的幀率高,那么就需要找更大帶寬的總線,也就是相機的輸出接口。
3、相機的曝光時間
相機的最小曝光時間,可以決定目標的運動速度。或者反過來說,目標的運動速度,對相機的最小曝光時間提出了要求。
假設我們的目標運動速度是1mm/S,我們的測量精度是0.01mm/pixel,那么我們必須考慮,物體的運動引起的拖影必須要小于我們的精度0.01mm,目標移動0.01mm,需要用時10ms,這就要求我們的相機的曝光時間必須小于10ms,如果大于這個曝光時間,那么僅僅物體運動引起的模糊就會大于0.01mm,這時我們的精度已經無法達到0.010.01mm/pixel了。
4、與鏡頭的匹配
傳感器芯片尺寸需要小于或等于鏡頭的靶面尺寸,C 或CS 安裝座也要匹配(或者增加轉接口)。







![[Oracle] DUAL數據表](http://pic.xiahunao.cn/[Oracle] DUAL數據表)

8.5)







![[硬件電路-122]:模擬電路 - 信號處理電路 - 模擬電路與數字電路、各自的面臨的難題對比?](http://pic.xiahunao.cn/[硬件電路-122]:模擬電路 - 信號處理電路 - 模擬電路與數字電路、各自的面臨的難題對比?)

