對于沒有特征或者說需要尋找另類關系的數據集,我們通常會用聚合或KNN近鄰的方法來分類,但這樣的分類或許在結果上是好的,但是解釋性并不好,有時候我們甚至能看到好的結果反直覺;而決策樹回歸做出的結果,由于其樹的結構,我們能看到每一步的決策,也就能推測出樹這么做的原因,還能進一步地調整樹的深度,使得結果更好。
以下是一個例子:
#?加載必要的包
library(rpart)??????#?決策樹
library(rpart.plot)?#?可視化樹#?1.?生成模擬數據集(非線性關系)
set.seed(123)
n?<-?200
x?<-?runif(n,?0,?10)??????????#?特征x:0到10的隨機數
y?<-?sin(x)?+?rnorm(n,?0,?0.3)?#?目標y:sin(x)加噪聲
data?<-?data.frame(x,?y)#?2.?劃分訓練集和測試集
train_idx?<-?sample(1:n,?0.7?*?n)
train_data?<-?data[train_idx,?]
test_data?<-?data[-train_idx,?]#?3.?訓練決策樹回歸模型
tree_model?<-?rpart(y?~?x,?data?=?train_data,?method?=?"anova",??#?回歸任務control?=?rpart.control(maxdepth?=?3))?#?限制樹深度#?4.?可視化樹結構
rpart.plot(tree_model,?main?=?"決策樹回歸")#?5.?預測并計算誤差
predictions?<-?predict(tree_model,?test_data)
mse?<-?mean((predictions?-?test_data$y)^2)
cat("測試集均方誤差(MSE):",?round(mse,?3),?"\n")#?6.?繪制真實值與預測值對比
plot(test_data$x,?test_data$y,?col?=?"blue",?pch?=?19,?main?=?"真實值?vs?預測值",?xlab?=?"x",?ylab?=?"y")
points(test_data$x,?predictions,?col?=?"red",?pch?=?4)
legend("topright",?legend?=?c("真實值",?"預測值"),?col?=?c("blue",?"red"),?pch?=?c(19,?4))
輸出:
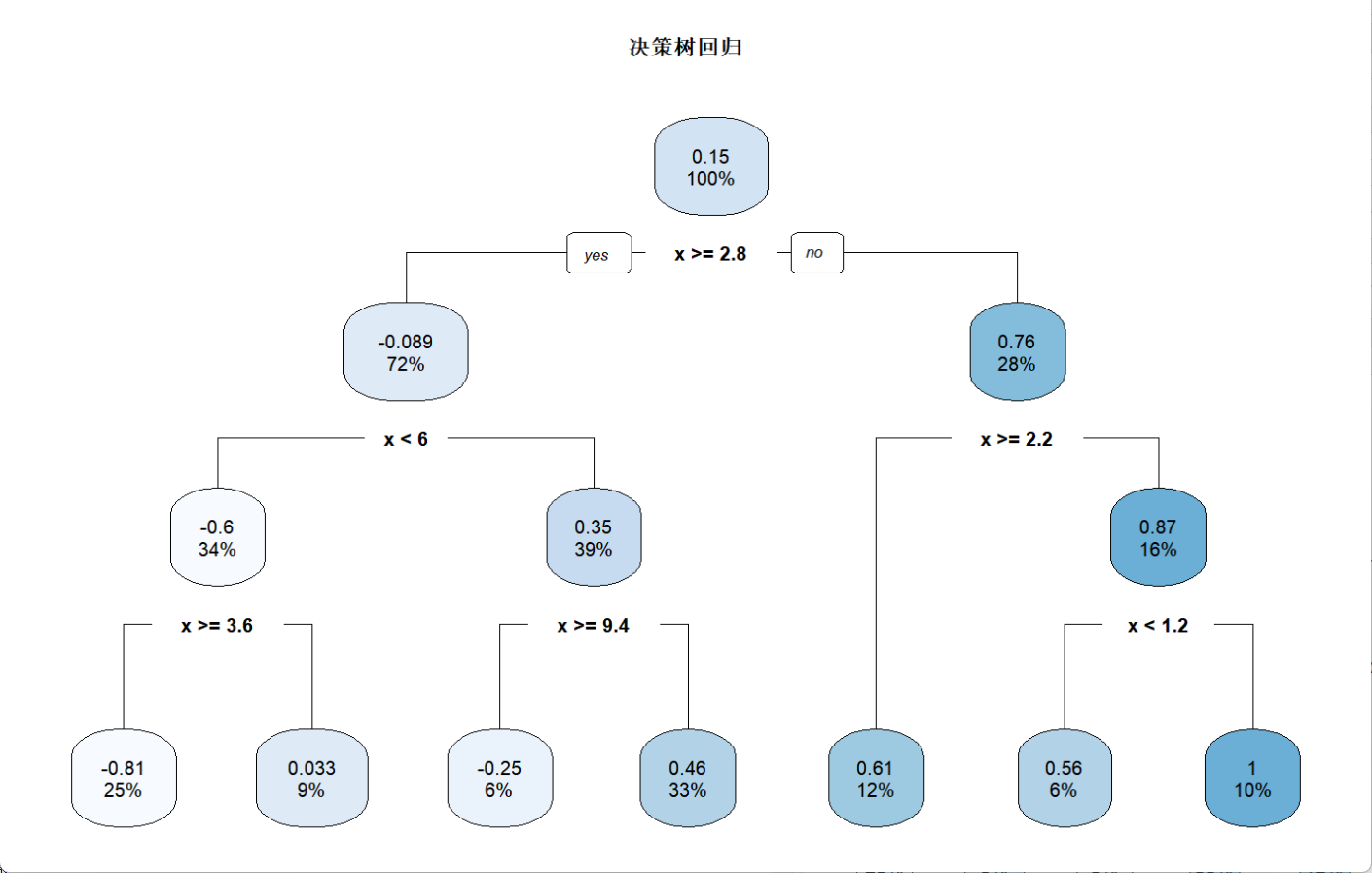
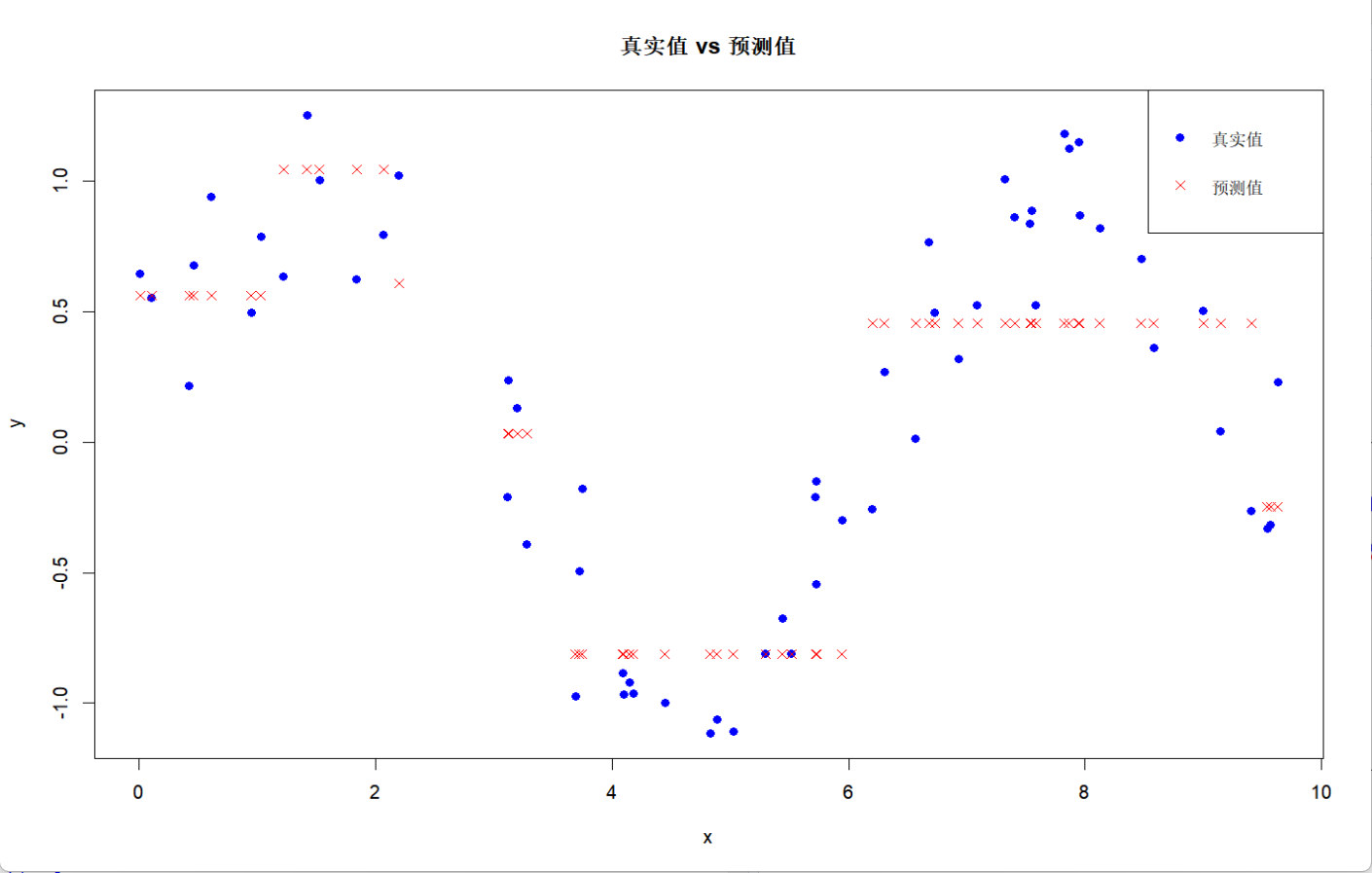
可以看到圖中的決策樹對于每一步的分支,都能看到分離之后兩邊的方差變化;而分布圖則表明決策樹對于波動較大的數據分布很難捕捉到趨勢,很容易出現欠擬合的現象,但是由于其可以根據結果反推進一步調參,反而能加深其結果的解釋性。

)

















