文章目錄
一、PyTorch框架簡介
1.1 什么是PyTorch
1.2 PyTorch的優勢
二、從入門到精通的PyTorch使用教程
2.1 入門階段
2.1.1 環境安裝與配置
2.1.2 Tensor基礎操作
2.1.3 自動求導(Autograd)
2.1.4 構建神經網絡(nn模塊)
2.1.5 損失函數與優化器
2.2 進階階段
2.2.1 GPU加速與多GPU使用
2.2.2 數據加載與預處理(torch.utils.data)
2.2.3 自定義模型與層
2.2.4 模型調試與可視化
2.2.5 高級訓練技巧
2.3 實戰應用與精通
2.3.1 遷移學習與預訓練模型
2.3.2 分布式訓練和多機訓練
2.3.3 模型優化與調參
2.3.4 實戰項目示例
2.3.5 框架內部源碼閱讀與擴展
三、總結
一、PyTorch框架簡介
1.1 什么是PyTorch
PyTorch是由Facebook的人工智能研究團隊開發的一款開源深度學習框架。它基于Python語言開發,具有易用性、靈活性和高效性,主要特點包括:
動態計算圖:與TensorFlow的靜態圖相比,PyTorch采用動態圖機制(即運行時定義計算圖),便于調試和開發復雜模型。
自動求導:內置強大的自動求導(Autograd)模塊,可以自動計算梯度,極大簡化了反向傳播算法的實現。
豐富的API:提供了張量(Tensor)運算、神經網絡層(nn模塊)、優化器(optim模塊)等豐富的工具和函數,方便快速搭建各種模型。
GPU加速:支持CUDA,可以方便地將數據和模型轉移到GPU上加速運算。
1.2 PyTorch的優勢
靈活性和易用性:由于采用動態圖機制,用戶可以像寫常規Python程序一樣定義和修改網絡結構,非常適合科研探索與實驗。
社區和生態系統:擁有活躍的開發者社區,提供大量的開源模型、工具包和教程。借助TorchVision、TorchText、TorchAudio等擴展庫,可以更方便地進行圖像、文本和音頻的深度學習研究。
調試方便:動態計算圖使得每一步計算都可以實時查看和修改,極大地方便了調試和模型理解。
二、從入門到精通的PyTorch使用教程
本教程將分為入門、進階和實戰應用三個階段,每個階段都有相應的代碼示例與講解。
2.1 入門階段
2.1.1 環境安裝與配置
打開PyTorch官方,選擇合適的版本進行安裝。
官網地址:Start Locally | PyTorch
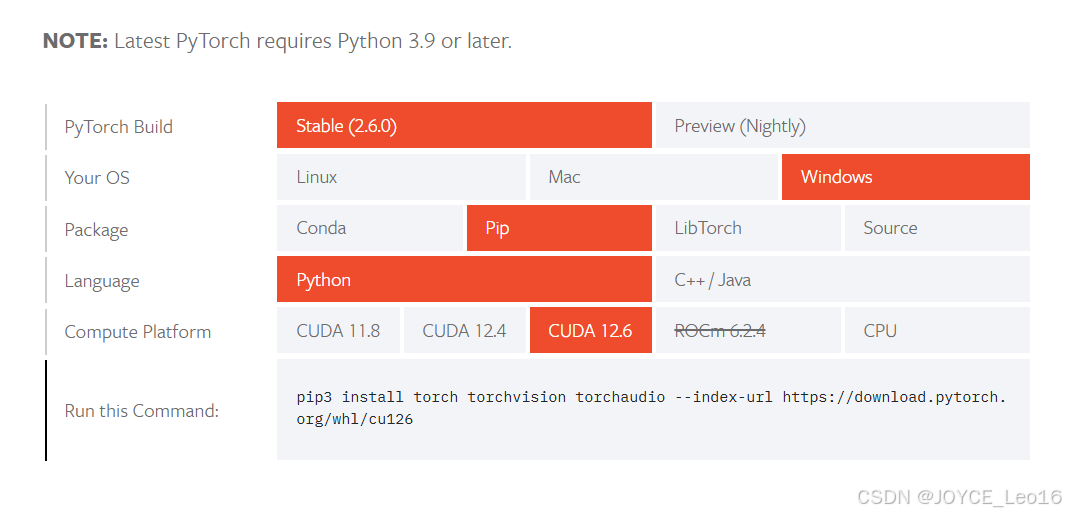
- 安裝方式:可以通過 pip 或 conda 安裝
pip?install torch torchvision或者
conda?install pytorch torchvision cudatoolkit=11.3?-c pytorch- 驗證安裝:安裝完成后,在Python環境中輸入以下代碼檢查是否能正常導入:
import?torchprint(torch.__version__)2.1.2 Tensor基礎操作
- 創建Tensor:類似于numpy數組,但可以在GPU上運算。
import?torch# 創建一個未初始化的 3x3 張量
x?= torch.empty(3,?3)
print(x)# 創建一個隨機初始化的張量
x?= torch.rand(3,?3)
print(x)# 創建一個全 0 的張量,并指定數據類型為 long
x?= torch.zeros(3,?3, dtype=torch.long)
print(x)- Tensor運算:支持加減乘除等多種運算,并且可以與numpy互轉。
x?= torch.rand(3,?3)
y?= torch.rand(3,?3)
# 基本加法
z?= x + y
# numpy 轉換
np_array?= x.numpy()
x_from_np?= torch.from_numpy(np_array)2.1.3 自動求導(Autograd)
- 基本概念:利用Autograd模塊,可以自動記錄每一步運算過程,從而在反向傳播時自動計算梯度。
# 定義一個 tensor,并設置 requires_grad=True
x?= torch.ones(2,?2, requires_grad=True)
print(x)# 定義一個簡單運算
y?= x +?2
z?= y * y *?3
out?= z.mean()# 反向傳播計算梯度
out.backward()
print(x.grad)- 注意:計算圖在反向傳播后默認會釋放,如果需要多次反向傳播,需要設置 retain_graph=True。
2.1.4 構建神經網絡(nn模塊)
nn.Module:所有神經網絡模型都需要繼承該類。
import?torch.nn?as?nn
import?torch.nn.functional?as?Fclass?Net(nn.Module):def?__init__(self):super(Net, self).__init__()# 定義一個全連接層:輸入維度 784,輸出維度 10self.fc1 = nn.Linear(784,?10)def?forward(self, x):# 將輸入 x 展平成 (batch_size, 784)x = x.view(-1,?784)x = self.fc1(x)return?F.log_softmax(x, dim=1)net = Net()
print(net)- 層級組合:可以將多層組合在一起,形成更復雜的網絡結構。
2.1.5 損失函數與優化器
- 定義損失函數:例如交叉熵損失函數
criterion?= nn.CrossEntropyLoss()- 選擇優化器:例如SGD優化器
import?torch.optim as optim
optimizer?= optim.SGD(net.parameters(), lr=0.01, momentum=0.9)- 訓練循環:
for?epoch?in?range(10):for?data, target?in?train_loader:optimizer.zero_grad() ??# 清空梯度output = net(data)loss = criterion(output, target)loss.backward() ? ? ? ??# 反向傳播optimizer.step() ? ? ? ?# 更新參數print(f"Epoch?{epoch}?finished with loss?{loss.item()}")2.2 進階階段
2.2.1 GPU加速與多GPU使用
- 將模型和數據遷移到GPU:
device = torch.device("cuda"?if?torch.cuda.is_available()?else?"cpu")
net.to(device)
data, target =?data.to(device), target.to(device)- 多GPU并行:利用nn.DataParallel實現模型的多GPU訓練。
if?torch.cuda.device_count() >?1:net?= nn.DataParallel(net)2.2.2 數據加載與預處理(torch.utils.data)
- 自定義數據集:繼承 troch.utils.data.Dataset 并重寫 __len__ 與 __getitem__ 方法。
from?torch.utils.data?import?Dataset, DataLoaderclass?MyDataset(Dataset):def?__init__(self, data, labels):self.data = dataself.labels = labelsdef?__len__(self):return?len(self.data)def?__getitem__(self, idx):sample = self.data[idx]label = self.labels[idx]return?sample, labeldataset = MyDataset(data, labels)
dataloader = DataLoader(dataset, batch_size=32, shuffle=True)- 常用預處理:使用 torchvision.transforms 對圖像數據進行變換,如裁剪、歸一化、隨機翻轉等。
2.2.3 自定義模型與層
- 自定義層:除了使用內置的層,也可以根據需求自定義層或模塊。
class?MyLayer(nn.Module):def?__init__(self, in_features, out_features):super(MyLayer,?self).__init__()self.weight = nn.Parameter(torch.randn(in_features, out_features))def?forward(self, x):return?torch.matmul(x,?self.weight)- 模塊嵌套:在復雜模型中,可以將子模塊封裝在一起,實現層級化設計。
2.2.4 模型調試與可視化
- 調試技巧:利用Python調試器(如pdb)或IDE自帶的調試工具,對模型前向傳播、反向傳播過程進行跟蹤。
- 可視化:使用TensorBoardX或其他可視化工具,監視訓練過程中損失、準確率等指標。
from?torch.utils.tensorboard?import?SummaryWriter
writer =?SummaryWriter(log_dir='./logs')
writer.add_scalar('Loss/train', loss.item(), epoch)2.2.5 高級訓練技巧
- 學習率調度:使用torch.optim.lr_scheduler 動態調整學習率,例如StepLR、ReduceLROnPlateau等。
scheduler?= optim.lr_scheduler.StepLR(optimizer, step_size=5, gamma=0.1)
for?epoch in range(10):train(...)scheduler.step()- 模型保存與加載:
# 保存模型
torch.save(net.state_dict(),?'model.pth')
# 加載模型
net.load_state_dict(torch.load('model.pth'))
net.eval() ?# 切換到評估模式2.3 實戰應用與精通
2.3.1 遷移學習與預訓練模型
- 利用預訓練模型:借助 torchvision.models 中的預訓練模型(如 ResNet、VGG),進行微調(fine-tuning)或特征提取。
import?torchvision.models?as?models
resnet18 = models.resnet18(pretrained=True)
# 凍結部分參數
for?param?in?resnet18.parameters():param.requires_grad =?False
# 修改最后一層
num_features = resnet18.fc.in_features
resnet18.fc = nn.Linear(num_features, num_classes)2.3.2 分布式訓練和多機訓練
分布式訓練:利用torch.distributed 包,實現跨GPU、跨節點訓練。常見方法包括:
- DistributedDataParallel(DDP):在單機或多機多卡訓練時比DataParallel更高效。
- 使用 launch 工具:例如 torch.distributed.launch 腳本啟動分布式訓練任務。
代碼示例:
import?torch.distributed?as?dist
dist.init_process_group(backend='nccl')
net = nn.parallel.DistributedDataParallel(net)2.3.3 模型優化與調參
- 超參數搜索:利用網格搜索、隨機搜索或貝葉斯優化等方法,對學習率、正則化系數等超參數進行調優。
- 正則化技術:使用 Dropout、Batch Normalization 等方法,提高模型的泛化能力。
- 混合精度訓練:利用 torch.cuda.amp 實現混合精度訓練,既能提升訓練速度,又能降低顯存占用。
scaler = torch.cuda.amp.GradScaler()
for?data, target?in?train_loader:optimizer.zero_grad()with torch.cuda.amp.autocast():output = net(data)loss = criterion(output, target)scaler.scale(loss).backward()scaler.step(optimizer)scaler.update()2.3.4 實戰項目示例
- 圖像分類:利用CIFAR-10、IamgeNet數據集,搭建卷積神經網絡(CNN)進行圖像分類任務。
- 自然語言處理:使用RNN、LSTM、Transformer等模型解決文本生成、機器翻譯、情感分析等問題。
- 生成對抗網絡(GAN):構建生成器與判別器,進行圖像生成任務,體驗對抗訓練的全過程。
2.3.5 框架內部源碼閱讀與擴展
- 源碼學習:深入閱讀PyTorch的核心模塊(如Autograd、nn.Module)源碼,有助于理解其底層實現原理,從而更好地擴展或定制功能。
- 擴展開發:基于PyTorch自定義C++擴展或Python API,結合高性能計算需求,打造個性化的深度學習工具。
三、總結
-
入門階段主要掌握 PyTorch 的基本概念、張量操作、自動求導、基本網絡構建及訓練流程;
-
進階階段深入理解 GPU 加速、數據加載、調試、可視化、學習率調度等技巧,學會自定義模塊和高效訓練;
-
實戰應用則通過預訓練模型、分布式訓練、混合精度、超參數優化等高級技術,最終達到精通應用 PyTorch 解決實際問題的水平。
參考資料:矩陣空間,作者-碼匠樂樂


)




 bootloaders梳理筆記)


)



)



)
