參考:
https://zhuanlan.zhihu.com/p/702727186
前言:
筆記本安裝了ubuntu20.04安裝ros一直失敗,于是將系統升級為ununut22.04,然后安裝ros,根據上面的教程,目前看來是有可能成功的。
系統升級為ununut22.04,pcl可以打開pcd文件,未受影響。
安裝humble:
設置編碼
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8添加密鑰
# 安裝下載軟件源和密鑰的指令
sudo apt update && sudo apt install curl -y
# 設置下載軟件源的密鑰
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg添加apt源
千萬注意,如果你是arm64架構,國內源路徑中/ubuntu/,務必改成/ubuntu-ports/,一般大家都默認是x86架構
清華源、阿里源都可以
sudo gedit /etc/apt/sources.list把下面代碼拷貝到sources.list中
deb https://mirrors.aliyun.com/ubuntu-ports/ jammy main restricted universe multiverse
# deb-src https://mirrors.aliyun.com/ubuntu-ports/ jammy main restricted universe multiversedeb https://mirrors.aliyun.com/ubuntu-ports/ jammy-security main restricted universe multiverse
# deb-src https://mirrors.aliyun.com/ubuntu-ports/ jammy-security main restricted universe multiversedeb https://mirrors.aliyun.com/ubuntu-ports/ jammy-updates main restricted universe multiverse
# deb-src https://mirrors.aliyun.com/ubuntu-ports/ jammy-updates main restricted universe multiverse# deb https://mirrors.aliyun.com/ubuntu-ports/ jammy-proposed main restricted universe multiverse
# deb-src https://mirrors.aliyun.com/ubuntu-ports/ jammy-proposed main restricted universe multiversedeb https://mirrors.aliyun.com/ubuntu-ports/ jammy-backports main restricted universe multiverse
# deb-src https://mirrors.aliyun.com/ubuntu-ports/ jammy-backports main restricted universe multiverse安裝humble-desktop
sudo apt update
sudo apt upgrade
sudo apt install ros-humble-desktop環境變量
source /opt/ros/humble/setup.bash
echo "source /opt/ros/humble/setup.bash">>~/.bashrc后記
實際上到這一步完成,就可以打開小烏龜移動了。下面的也沒搞明白干啥的。安裝起來非常慢。也跟著做了。
安裝ROS2包
sudo apt update
# 下面這個命令意思是,所有humble包全部安裝,大概4GB,我在網絡環境一般的情況下,安裝了10個小時(網絡真的很一般)
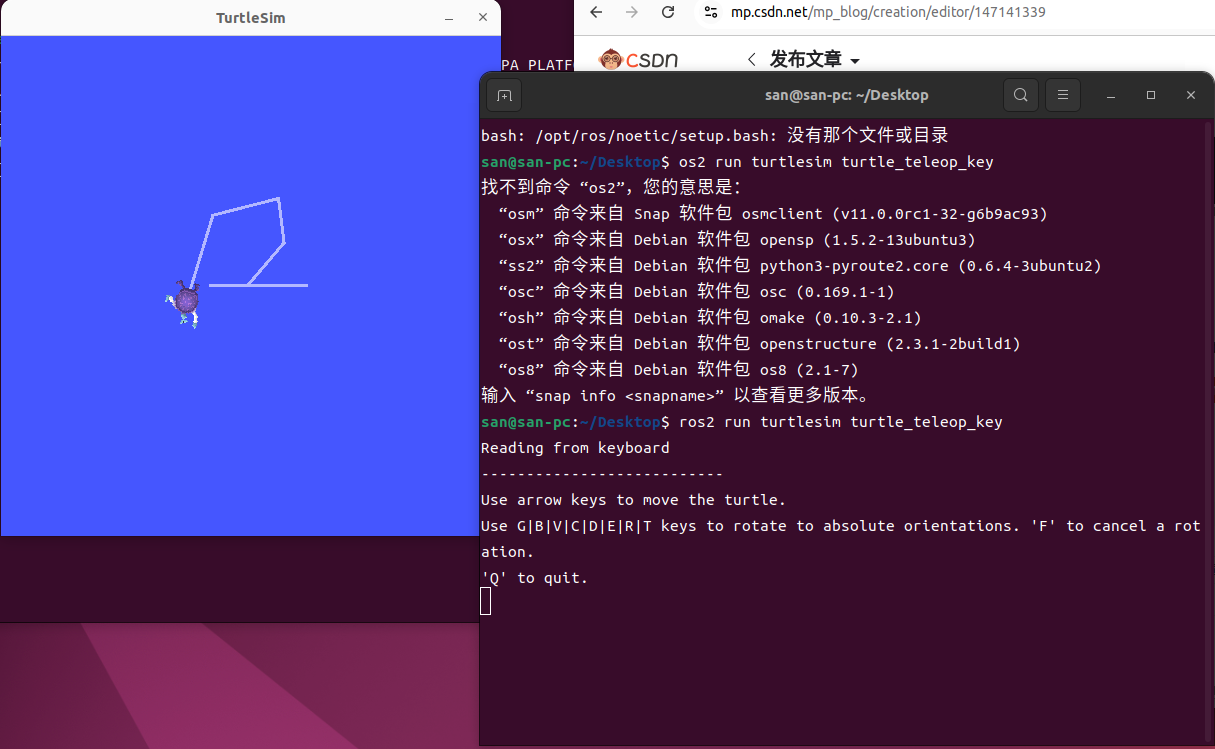
sudo apt install ros-humble-****小海龜測試
打開一個terminal,輸入:ros2 run turtlesim turtlesim_node
再打開一個terminal,輸入:ros2 run turtlesim turtle_teleop_key




—無重復字符的最長子串)



![大模型本地部署系列(3) Ollama部署QwQ[阿里云通義千問]](http://pic.xiahunao.cn/大模型本地部署系列(3) Ollama部署QwQ[阿里云通義千問])

續航與散熱)



)




