代碼隨想錄算法訓練營第71天:路徑算法
?
bellman_ford之單源有限最短路
卡碼網:96. 城市間貨物運輸 III(opens new window)
【題目描述】
某國為促進城市間經濟交流,決定對貨物運輸提供補貼。共有 n 個編號為 1 到 n 的城市,通過道路網絡連接,網絡中的道路僅允許從某個城市單向通行到另一個城市,不能反向通行。
網絡中的道路都有各自的運輸成本和政府補貼,道路的權值計算方式為:運輸成本 - 政府補貼。
權值為正表示扣除了政府補貼后運輸貨物仍需支付的費用;
權值為負則表示政府的補貼超過了支出的運輸成本,實際表現為運輸過程中還能賺取一定的收益。
請計算在最多經過 k 個城市的條件下,從城市 src 到城市 dst 的最低運輸成本。
【輸入描述】
第一行包含兩個正整數,第一個正整數 n 表示該國一共有 n 個城市,第二個整數 m 表示這些城市中共有 m 條道路。
接下來為 m 行,每行包括三個整數,s、t 和 v,表示 s 號城市運輸貨物到達 t 號城市,道路權值為 v。
最后一行包含三個正整數,src、dst、和 k,src 和 dst 為城市編號,從 src 到 dst 經過的城市數量限制。
【輸出描述】
輸出一個整數,表示從城市 src 到城市 dst 的最低運輸成本,如果無法在給定經過城市數量限制下找到從 src 到 dst 的路徑,則輸出 “unreachable”,表示不存在符合條件的運輸方案。
輸入示例:
6 7
1 2 1
2 4 -3
2 5 2
1 3 5
3 5 1
4 6 4
5 6 -2
2 6 1
輸出示例:
0
#思路
本題為單源有限最短路問題,同樣是 kama94.城市間貨物運輸I 延伸題目。
注意題目中描述是 最多經過 k 個城市的條件下,而不是一定經過k個城市,也可以經過的城市數量比k小,但要最短的路徑。
在 kama94.城市間貨物運輸I 中我們講了:對所有邊松弛一次,相當于計算 起點到達 與起點一條邊相連的節點 的最短距離。
節點數量為n,起點到終點,最多是 n-1 條邊相連。 那么對所有邊松弛 n-1 次 就一定能得到 起點到達 終點的最短距離。
(如果對以上講解看不懂,建議詳看 kama94.城市間貨物運輸I )
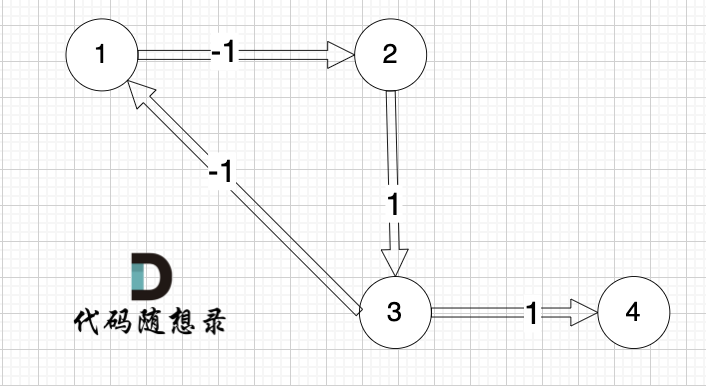
本題是最多經過 k 個城市, 那么是 k + 1條邊相連的節點。 這里可能有錄友想不懂為什么是k + 1,來看這個圖:
? ?
?
圖中,節點2 最多已經經過2個節點 到達節點4,那么中間是有多少條邊呢,是 3 條邊對吧。
所以本題就是求:起點最多經過k + 1 條邊到達終點的最短距離。
對所有邊松弛一次,相當于計算 起點到達 與起點一條邊相連的節點 的最短距離,那么對所有邊松弛 k + 1次,就是求 起點到達 與起點k + 1條邊相連的節點的 最短距離。
注意: 本題是 kama94.城市間貨物運輸I 的拓展題,如果對 bellman_ford 沒有深入了解,強烈建議先看 kama94.城市間貨物運輸I 再做本題。
理解以上內容,其實本題代碼就很容易了,bellman_ford 標準寫法是松弛 n-1 次,本題就松弛 k + 1次就好。
此時我們可以寫出如下代碼:
// 版本一
#include <iostream>
#include <vector>
#include <list>
#include <climits>
using namespace std;int main() {
int src, dst,k ,p1, p2, val ,m , n;cin >> n >> m;vector<vector<int>> grid;for(int i = 0; i < m; i++){
cin >> p1 >> p2 >> val;
// p1 指向 p2,權值為 val
grid.push_back({p1, p2, val});
}cin >> src >> dst >> k;vector<int> minDist(n + 1 , INT_MAX);
minDist[src] = 0;
for (int i = 1; i <= k + 1; i++) { // 對所有邊松弛 k + 1次
for (vector<int> &side : grid) {
int from = side[0];
int to = side[1];
int price = side[2];
if (minDist[from] != INT_MAX && minDist[to] > minDist[from] + price) minDist[to] = minDist[from] + price;
}}if (minDist[dst] == INT_MAX) cout << "unreachable" << endl; // 不能到達終點
else cout << minDist[dst] << endl; // 到達終點最短路徑}以上代碼 標準 bellman_ford 寫法,松弛 k + 1次,看上去沒什么問題。
但大家提交后,居然沒通過!
這是為什么呢?
接下來我們拿這組數據來舉例:
4 4
1 2 -1
2 3 1
3 1 -1
3 4 1
1 4 3
(注意上面的示例是有負權回路的,只有帶負權回路的圖才能說明問題)
負權回路是指一條道路的總權值為負,這樣的回路使得通過反復經過回路中的道路,理論上可以無限地減少總成本或無限地增加總收益。
正常來說,這組數據輸出應該是 1,但以上代碼輸出的是 -2。
在講解原因的時候,強烈建議大家,先把 minDist數組打印出來,看看minDist數組是不是按照自己的想法變化的,這樣更容易理解我接下來的講解內容。 (一定要動手,實踐出真實,腦洞模擬不靠譜)
打印的代碼可以是這樣:
#include <iostream>
#include <vector>
#include <list>
#include <climits>
using namespace std;int main() {
int src, dst,k ,p1, p2, val ,m , n;cin >> n >> m;vector<vector<int>> grid;for(int i = 0; i < m; i++){
cin >> p1 >> p2 >> val;
// p1 指向 p2,權值為 val
grid.push_back({p1, p2, val});
}cin >> src >> dst >> k;vector<int> minDist(n + 1 , INT_MAX);
minDist[src] = 0;
for (int i = 1; i <= k + 1; i++) { // 對所有邊松弛 k + 1次
for (vector<int> &side : grid) {
int from = side[0];
int to = side[1];
int price = side[2];
if (minDist[from] != INT_MAX && minDist[to] > minDist[from] + price) minDist[to] = minDist[from] + price;
}
// 打印 minDist 數組
for (int j = 1; j <= n; j++) cout << minDist[j] << " ";
cout << endl;}if (minDist[dst] == INT_MAX) cout << "unreachable" << endl; // 不能到達終點
else cout << minDist[dst] << endl; // 到達終點最短路徑}接下來,我按照上面的示例帶大家 畫圖舉例 對所有邊松弛一次 的效果圖。
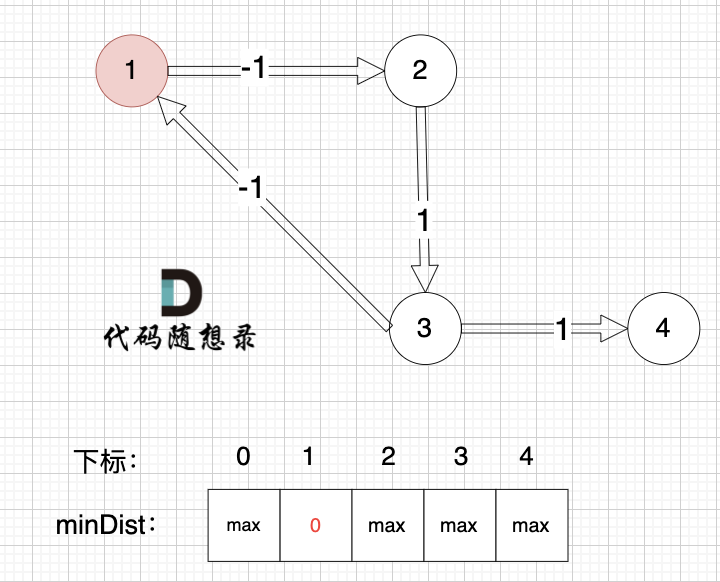
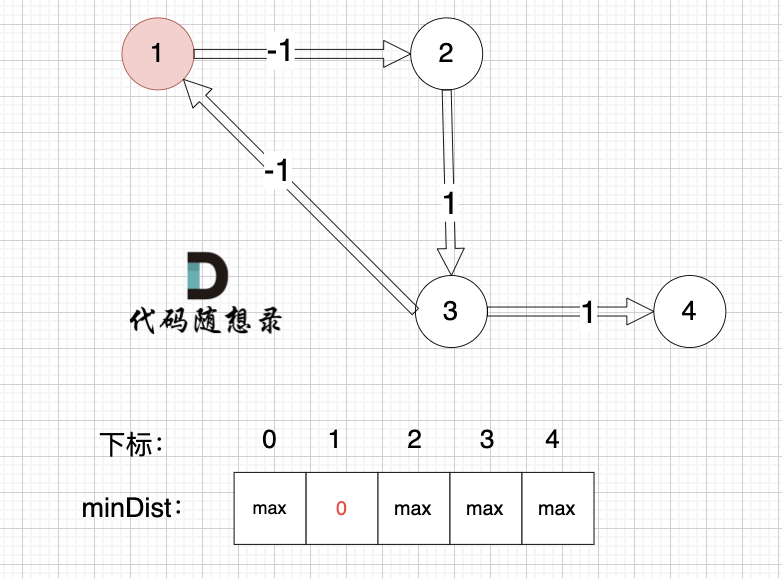
起點為節點1, 起點到起點的距離為0,所以 minDist[1] 初始化為0 ,如圖:
? ?
?
其他節點對應的minDist初始化為max,因為我們要求最小距離,那么還沒有計算過的節點 默認是一個最大數,這樣才能更新最小距離。
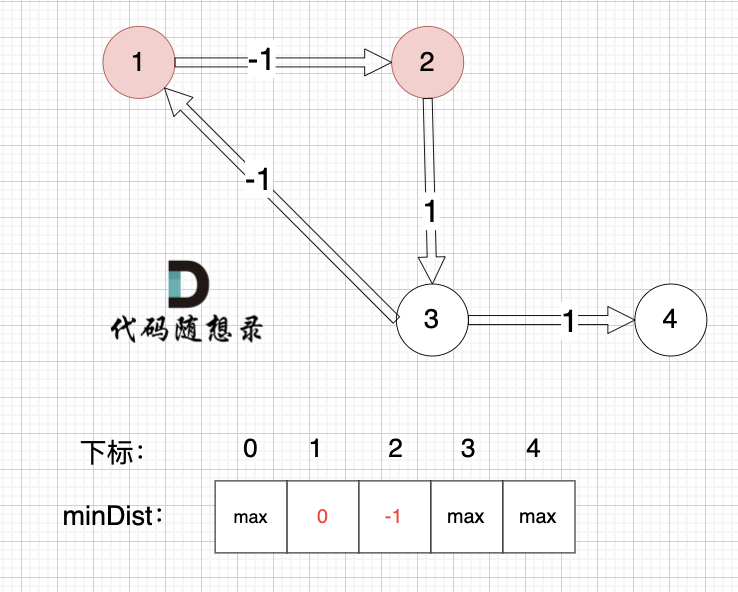
當我們開始對所有邊開始第一次松弛:
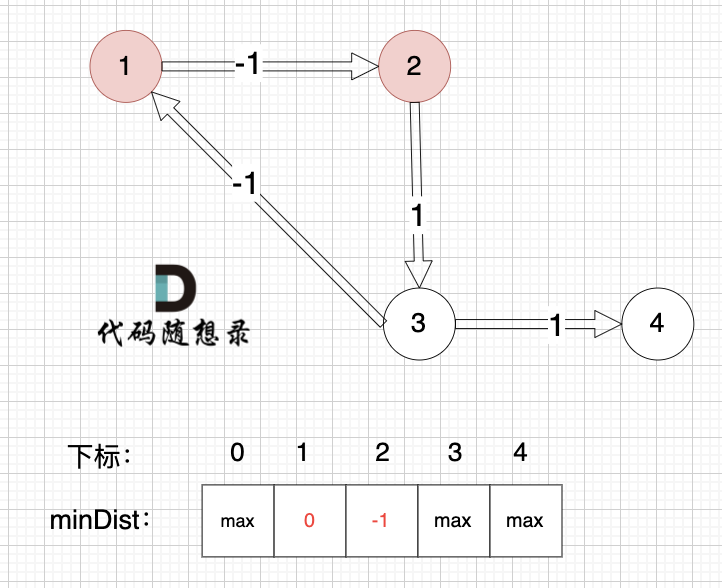
邊:節點1 -> 節點2,權值為-1 ,minDist[2] > minDist[1] + (-1),更新 minDist[2] = minDist[1] + (-1) = 0 - 1 = -1 ,如圖:
? ?
?
邊:節點2 -> 節點3,權值為1 ,minDist[3] > minDist[2] + 1 ,更新 minDist[3] = minDist[2] + 1 = -1 + 1 = 0 ,如圖: 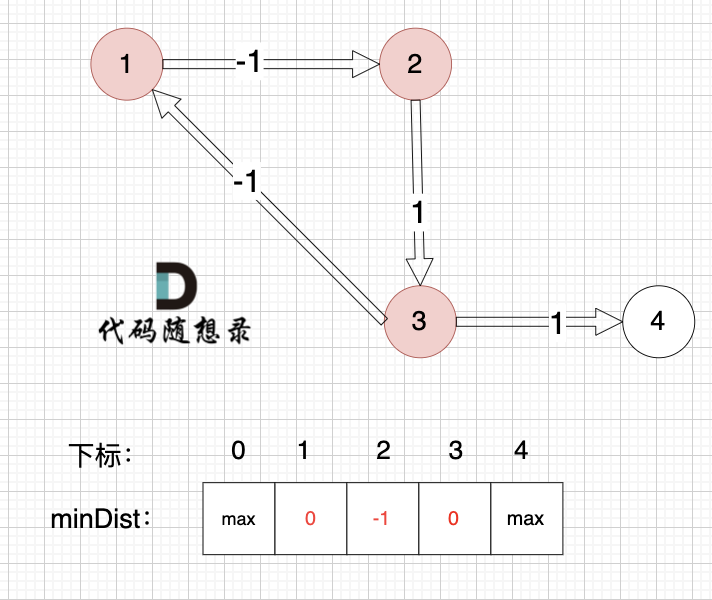 ?
?
邊:節點3 -> 節點1,權值為-1 ,minDist[1] > minDist[3] + (-1),更新 minDist[1] = 0 + (-1) = -1 ,如圖:
? ?
?
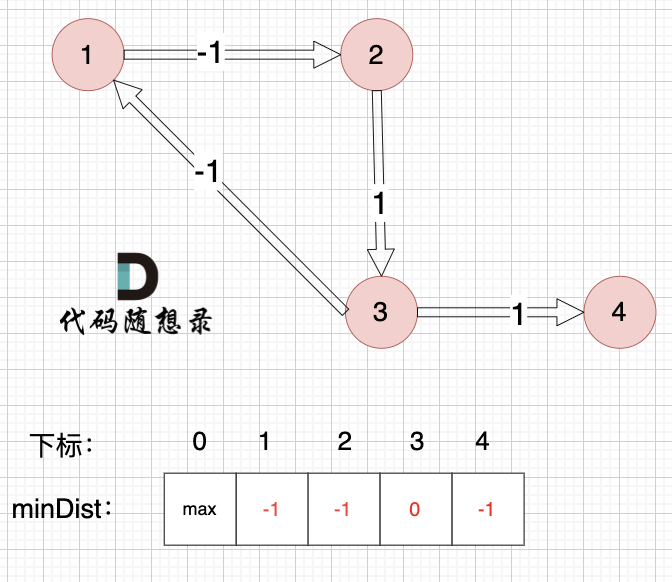
邊:節點3 -> 節點4,權值為1 ,minDist[4] > minDist[3] + 1,更新 minDist[4] = 0 + (-1) = -1 ,如圖:
? ?
?
以上是對所有邊進行的第一次松弛,最后 minDist數組為 :-1 -1 0 1 ,(從下標1算起)
后面幾次松弛我就不挨個畫圖了,過程大同小異,我直接給出minDist數組的變化:
所有邊進行的第二次松弛,minDist數組為 : -2 -2 -1 0 所有邊進行的第三次松弛,minDist數組為 : -3 -3 -2 -1 所有邊進行的第四次松弛,minDist數組為 : -4 -4 -3 -2 (本示例中k為3,所以松弛4次)
最后計算的結果minDist[4] = -2,即 起點到 節點4,最多經過 3 個節點的最短距離是 -2,但 正確的結果應該是 1,即路徑:節點1 -> 節點2 -> 節點3 -> 節點4。
理論上來說,對所有邊松弛一次,相當于計算 起點到達 與起點一條邊相連的節點 的最短距離。
對所有邊松弛兩次,相當于計算 起點到達 與起點兩條邊相連的節點的最短距離。
對所有邊松弛三次,以此類推。
但在對所有邊松弛第一次的過程中,大家會發現,不僅僅 與起點一條邊相連的節點更新了,所有節點都更新了。
而且對所有邊的后面幾次松弛,同樣是更新了所有的節點,說明 至多經過k 個節點 這個限制 根本沒有限制住,每個節點的數值都被更新了。
這是為什么?
在上面畫圖距離中,對所有邊進行第一次松弛,在計算 邊(節點2 -> 節點3) 的時候,更新了 節點3。
??
理論上來說節點3 應該在對所有邊第二次松弛的時候才更新。 這因為當時是基于已經計算好的 節點2(minDist[2])來做計算了。
minDist[2]在計算邊:(節點1 -> 節點2)的時候剛剛被賦值為 -1。
這樣就造成了一個情況,即:計算minDist數組的時候,基于了本次松弛的 minDist數值,而不是上一次 松弛時候minDist的數值。
所以在每次計算 minDist 時候,要基于 對所有邊上一次松弛的 minDist 數值才行,所以我們要記錄上一次松弛的minDist。
代碼修改如下: (關鍵地方已經注釋)
// 版本二
#include <iostream>
#include <vector>
#include <list>
#include <climits>
using namespace std;int main() {
int src, dst,k ,p1, p2, val ,m , n;cin >> n >> m;vector<vector<int>> grid;for(int i = 0; i < m; i++){
cin >> p1 >> p2 >> val;
grid.push_back({p1, p2, val});
}cin >> src >> dst >> k;vector<int> minDist(n + 1 , INT_MAX);
minDist[src] = 0;
vector<int> minDist_copy(n + 1); // 用來記錄上一次遍歷的結果
for (int i = 1; i <= k + 1; i++) {
minDist_copy = minDist; // 獲取上一次計算的結果
for (vector<int> &side : grid) {
int from = side[0];
int to = side[1];
int price = side[2];
// 注意使用 minDist_copy 來計算 minDist
if (minDist_copy[from] != INT_MAX && minDist[to] > minDist_copy[from] + price) {
minDist[to] = minDist_copy[from] + price;
}
}
}
if (minDist[dst] == INT_MAX) cout << "unreachable" << endl; // 不能到達終點
else cout << minDist[dst] << endl; // 到達終點最短路徑}- 時間復雜度: O(K * E) , K為至多經過K個節點,E為圖中邊的數量
- 空間復雜度: O(N) ,即 minDist 數組所開辟的空間
#拓展一(邊的順序的影響)
其實邊的順序會影響我們每一次拓展的結果。
我來給大家舉個例子。
我上面講解中,給出的示例是這樣的:
4 4
1 2 -1
2 3 1
3 1 -1
3 4 1
1 4 3
我將示例中邊的順序改一下,給成:
4 4
3 1 -1
3 4 1
2 3 1
1 2 -1
1 4 3
所構成是圖是一樣的,都是如下的這個圖,但給出的邊的順序是不一樣的。
? ?
?
再用版本一的代碼是運行一下,發現結果輸出是 1, 是對的。
? ?
?
分明剛剛輸出的結果是 -2,是錯誤的,怎么 一樣的圖,這次輸出的結果就對了呢?
其實這是和示例中給出的邊的順序是有關的,
我們按照修改后的示例再來模擬 對所有邊的第一次拓展情況。
初始化:
? ?
?
邊:節點3 -> 節點1,權值為-1 ,節點3還沒有被計算過,節點1 不更新。
邊:節點3 -> 節點4,權值為1 ,節點3還沒有被計算過,節點4 不更新。
邊:節點2 -> 節點3,權值為 1 ,節點2還沒有被計算過,節點3 不更新。
邊:節點1 -> 節點2,權值為 -1 ,minDist[2] > minDist[1] + (-1),更新 minDist[2] = 0 + (-1) = -1 ,如圖:
? ?
?
以上是對所有邊 松弛一次的狀態。
可以發現 同樣的圖,邊的順序不一樣,使用版本一的代碼 每次松弛更新的節點也是不一樣的。
而邊的順序是隨機的,是題目給我們的,所以本題我們才需要 記錄上一次松弛的minDist,來保障 每一次對所有邊松弛的結果。
#拓展二(本題本質)
那么前面講解過的 94.城市間貨物運輸I 和 95.城市間貨物運輸II 也是bellman_ford經典算法,也沒使用 minDist_copy,怎么就沒問題呢?
如果沒看過我上面這兩篇講解的話,建議詳細學習上面兩篇,再看我下面講的區別,否則容易看不懂。
94.城市間貨物運輸I, 是沒有 負權回路的,那么 多松弛多少次,對結果都沒有影響。
求 節點1 到 節點n 的最短路徑,松弛n-1 次就夠了,松弛 大于 n-1次,結果也不會變。
那么在對所有邊進行第一次松弛的時候,如果基于 本次計算的 minDist 來計算 minDist (相當于多做松弛了),也是對最終結果沒影響。
95.城市間貨物運輸II 是判斷是否有 負權回路,一旦有負權回路, 對所有邊松弛 n-1 次以后,在做松弛 minDist 數值一定會變,根據這一點來判斷是否有負權回路。
所以,95.城市間貨物運輸II 只需要判斷minDist數值變化了就行,而 minDist 的數值對不對,并不是我們關心的。
那么本題 為什么計算minDist 一定要基于上次 的 minDist 數值。
其關鍵在于本題的兩個因素:
- 本題可以有負權回路,說明只要多做松弛,結果是會變的。
- 本題要求最多經過k個節點,對松弛次數是有限制的。
如果本題中 沒有負權回路的測試用例, 那版本一的代碼就可以過了,也就不用我費這么大口舌去講解的這個坑了。
#拓展三(SPFA)
本題也可以用 SPFA來做,關于 SPFA ,已經在這里 0094.城市間貨物運輸I-SPFA 有詳細講解。
使用SPFA算法解決本題的時候,關鍵在于 如何控制松弛k次。
其實實現不難,但有點技巧,可以用一個變量 que_size 記錄每一輪松弛入隊列的所有節點數量。
下一輪松弛的時候,就把隊列里 que_size 個節點都彈出來,就是上一輪松弛入隊列的節點。
代碼如下(詳細注釋)
#include <iostream>
#include <vector>
#include <queue>
#include <list>
#include <climits>
using namespace std;struct Edge { //鄰接表
int to; // 鏈接的節點
int val; // 邊的權重Edge(int t, int w): to(t), val(w) {} // 構造函數
};int main() {
int n, m, p1, p2, val;
cin >> n >> m;vector<list<Edge>> grid(n + 1); // 鄰接表// 將所有邊保存起來
for(int i = 0; i < m; i++){
cin >> p1 >> p2 >> val;
// p1 指向 p2,權值為 val
grid[p1].push_back(Edge(p2, val));
}
int start, end, k;
cin >> start >> end >> k;k++;vector<int> minDist(n + 1 , INT_MAX);
vector<int> minDist_copy(n + 1); // 用來記錄每一次遍歷的結果minDist[start] = 0;queue<int> que;
que.push(start); // 隊列里放入起點int que_size;
while (k-- && !que.empty()) {minDist_copy = minDist; // 獲取上一次計算的結果
que_size = que.size(); // 記錄上次入隊列的節點個數
while (que_size--) { // 上一輪松弛入隊列的節點,這次對應的邊都要做松弛
int node = que.front(); que.pop();
for (Edge edge : grid[node]) {
int from = node;
int to = edge.to;
int price = edge.val;
if (minDist[to] > minDist_copy[from] + price) {
minDist[to] = minDist_copy[from] + price;
que.push(to);
}
}}
}
if (minDist[end] == INT_MAX) cout << "unreachable" << endl;
else cout << minDist[end] << endl;}時間復雜度: O(K * H) H 為不確定數,取決于 圖的稠密度,但H 一定是小于等于 E 的
關于 SPFA的是時間復雜度分析,我在0094.城市間貨物運輸I-SPFA 有詳細講解
但大家會發現,以上代碼大家提交后,怎么耗時這么多?
? ?
?
理論上,SPFA的時間復雜度不是要比 bellman_ford 更優嗎?
怎么耗時多了這么多呢?
以上代碼有一個可以改進的點,每一輪松弛中,重復節點可以不用入隊列。
因為重復節點入隊列,下次從隊列里取節點的時候,該節點要取很多次,而且都是重復計算。
所以代碼可以優化成這樣:
#include <iostream>
#include <vector>
#include <queue>
#include <list>
#include <climits>
using namespace std;struct Edge { //鄰接表
int to; // 鏈接的節點
int val; // 邊的權重Edge(int t, int w): to(t), val(w) {} // 構造函數
};int main() {
int n, m, p1, p2, val;
cin >> n >> m;vector<list<Edge>> grid(n + 1); // 鄰接表// 將所有邊保存起來
for(int i = 0; i < m; i++){
cin >> p1 >> p2 >> val;
// p1 指向 p2,權值為 val
grid[p1].push_back(Edge(p2, val));
}
int start, end, k;
cin >> start >> end >> k;k++;vector<int> minDist(n + 1 , INT_MAX);
vector<int> minDist_copy(n + 1); // 用來記錄每一次遍歷的結果minDist[start] = 0;queue<int> que;
que.push(start); // 隊列里放入起點int que_size;
while (k-- && !que.empty()) {vector<bool> visited(n + 1, false); // 每一輪松弛中,控制節點不用重復入隊列
minDist_copy = minDist;
que_size = que.size();
while (que_size--) {
int node = que.front(); que.pop();
for (Edge edge : grid[node]) {
int from = node;
int to = edge.to;
int price = edge.val;
if (minDist[to] > minDist_copy[from] + price) {
minDist[to] = minDist_copy[from] + price;
if(visited[to]) continue; // 不用重復放入隊列,但需要重復松弛,所以放在這里位置
visited[to] = true;
que.push(to);
}
}}
}
if (minDist[end] == INT_MAX) cout << "unreachable" << endl;
else cout << minDist[end] << endl;
}
以上代碼提交后,耗時情況:
? ?
?
大家發現 依然遠比 bellman_ford 的代碼版本 耗時高。
這又是為什么呢?
對于后臺數據,我特別制作的一個稠密大圖,該圖有250個節點和10000條邊, 在這種情況下, SPFA 的時間復雜度 是接近與 bellman_ford的。
但因為 SPFA 節點的進出隊列操作,耗時很大,所以相同的時間復雜度的情況下,SPFA 實際上更耗時了。
這一點我在 0094.城市間貨物運輸I-SPFA 有分析,感興趣的錄友再回頭去看看。
#拓展四(能否用dijkstra)
本題能否使用 dijkstra 算法呢?
dijkstra 是貪心的思路 每一次搜索都只會找距離源點最近的非訪問過的節點。
如果限制最多訪問k個節點,那么 dijkstra 未必能在有限次就能到達終點,即使在經過k個節點確實可以到達終點的情況下。
這么說大家會感覺有點抽象,我用 dijkstra樸素版精講 里的示例在舉例說明: (如果沒看過我講的dijkstra樸素版精講,建議去仔細看一下,否則下面講解容易看不懂)
在以下這個圖中,求節點1 到 節點7 最多經過2個節點 的最短路是多少呢?
?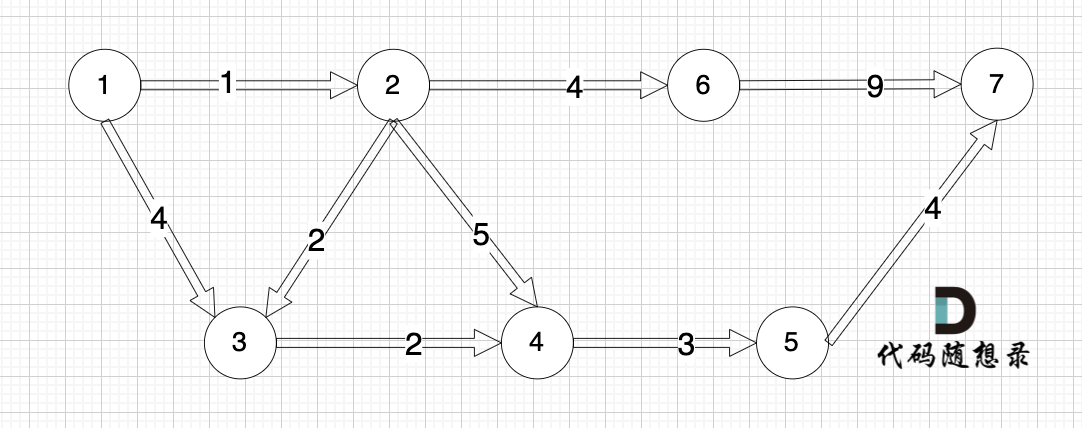 ?
?
最短路顯然是:
?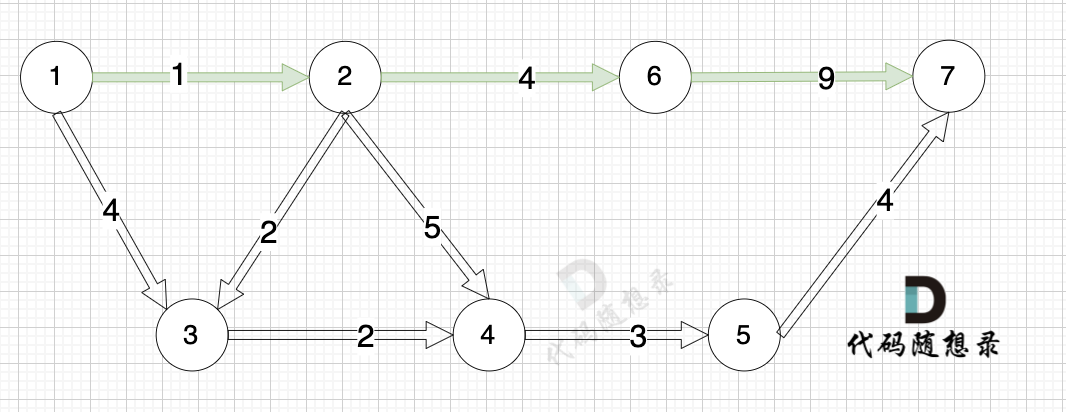 ?
?
最多經過2個節點,也就是3條邊相連的路線:節點1 -> 節點2 -> 節點6-> 節點7
如果是 dijkstra 求解的話,求解過程是這樣的: (下面是dijkstra的模擬過程,我精簡了很多,如果看不懂,一定要先看dijkstra樸素版精講)
初始化如圖所示:
?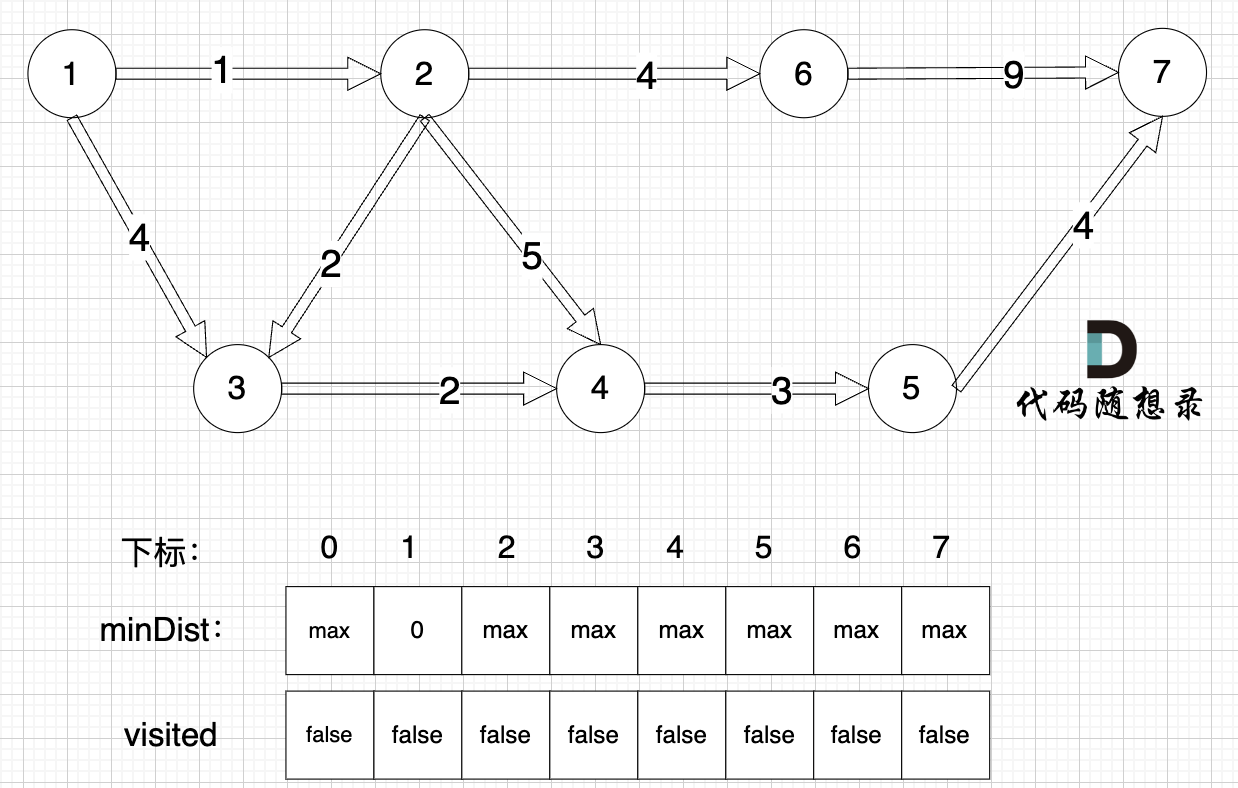 ?
?
找距離源點最近且沒有被訪問過的節點,先找節點1
?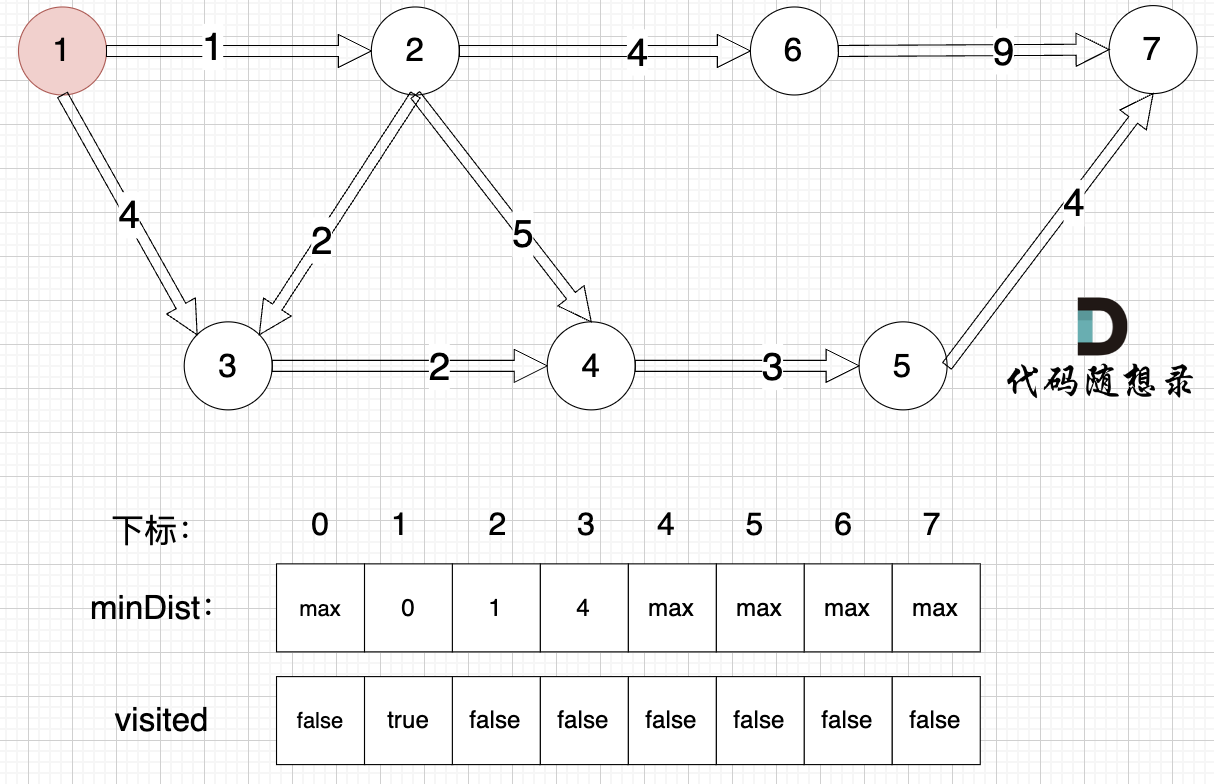 ?
?
距離源點最近且沒有被訪問過的節點,找節點2:
? ?
?
距離源點最近且沒有被訪問過的節點,找到節點3:
?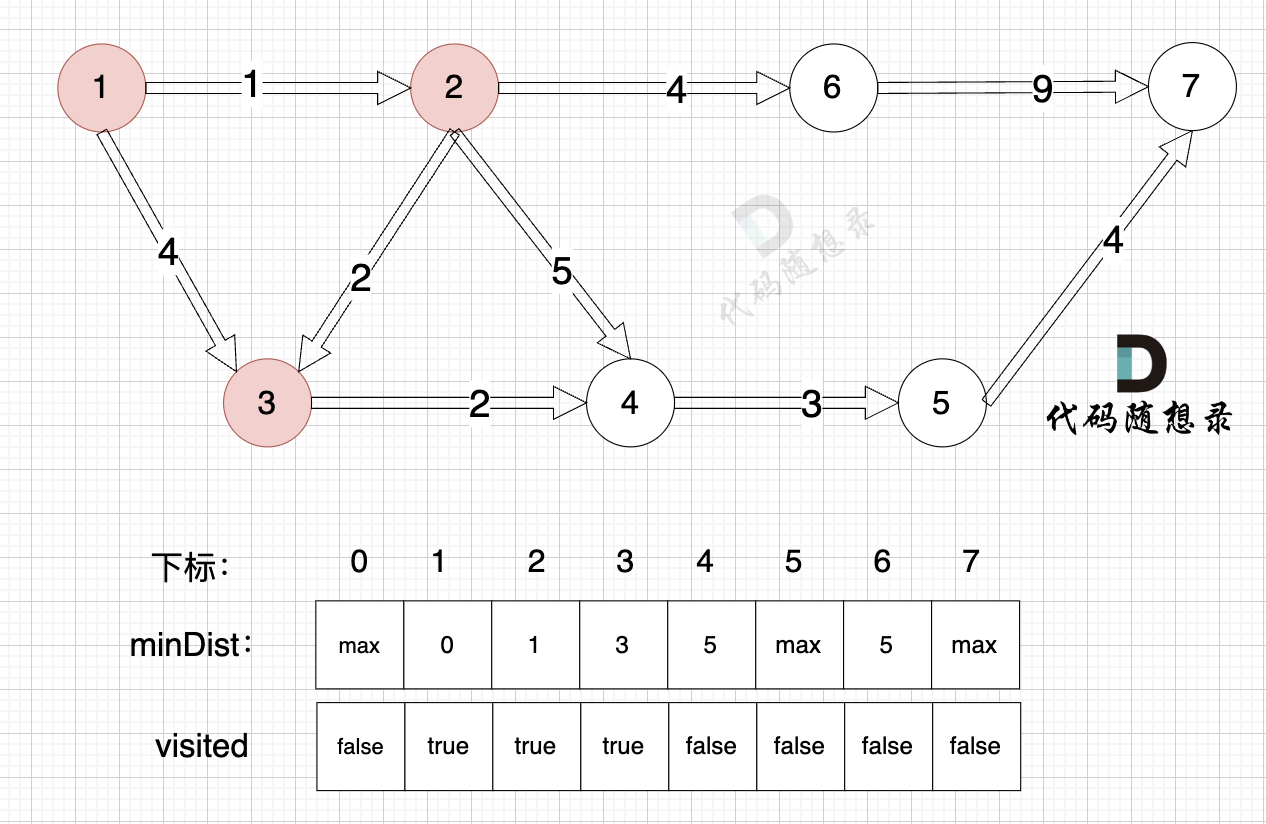 ?
?
距離源點最近且沒有被訪問過的節點,找到節點4:
?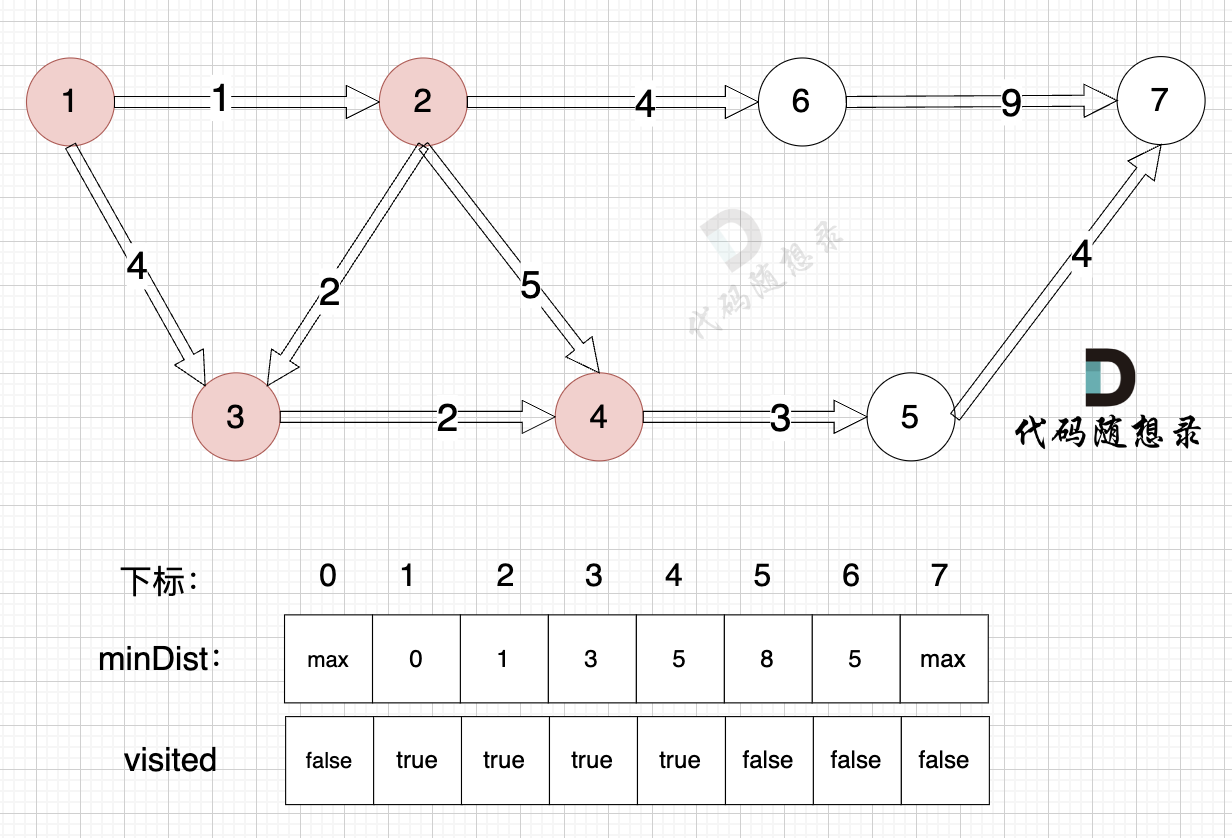 ?
?
此時最多經過2個節點的搜索就完畢了,但結果中minDist[7] (即節點7的結果)并沒有被更。
那么 dijkstra 會告訴我們 節點1 到 節點7 最多經過2個節點的情況下是不可到達的。
通過以上模擬過程,大家應該能感受到 dijkstra 貪心的過程,正是因為 貪心,所以 dijkstra 找不到 節點1 -> 節點2 -> 節點6-> 節點7 這條路徑。
#總結
本題是單源有限最短路問題,也是 bellman_ford的一個拓展問題,如果理解bellman_ford 其實思路比較容易理解,但有很多細節。
例如 為什么要用 minDist_copy 來記錄上一輪 松弛的結果。 這也是本篇我為什么花了這么大篇幅講解的關鍵所在。
接下來,還給大家做了四個拓展:
- 邊的順序的影響
- 本題的本質
- SPFA的解法
- 能否用dijkstra
學透了以上四個拓展,相信大家會對bellman_ford有更深入的理解。
Floyd 算法精講
卡碼網:97. 小明逛公園(opens new window)
【題目描述】
小明喜歡去公園散步,公園內布置了許多的景點,相互之間通過小路連接,小明希望在觀看景點的同時,能夠節省體力,走最短的路徑。
給定一個公園景點圖,圖中有 N 個景點(編號為 1 到 N),以及 M 條雙向道路連接著這些景點。每條道路上行走的距離都是已知的。
小明有 Q 個觀景計劃,每個計劃都有一個起點 start 和一個終點 end,表示他想從景點 start 前往景點 end。由于小明希望節省體力,他想知道每個觀景計劃中從起點到終點的最短路徑長度。 請你幫助小明計算出每個觀景計劃的最短路徑長度。
【輸入描述】
第一行包含兩個整數 N, M, 分別表示景點的數量和道路的數量。
接下來的 M 行,每行包含三個整數 u, v, w,表示景點 u 和景點 v 之間有一條長度為 w 的雙向道路。
接下里的一行包含一個整數 Q,表示觀景計劃的數量。
接下來的 Q 行,每行包含兩個整數 start, end,表示一個觀景計劃的起點和終點。
【輸出描述】
對于每個觀景計劃,輸出一行表示從起點到終點的最短路徑長度。如果兩個景點之間不存在路徑,則輸出 -1。
【輸入示例】
7 3 1 2 4 2 5 6 3 6 8 2 1 2 2 3
【輸出示例】
4 -1
【提示信息】
從 1 到 2 的路徑長度為 4,2 到 3 之間并沒有道路。
1 <= N, M, Q <= 1000.
#思路
本題是經典的多源最短路問題。
在這之前我們講解過,dijkstra樸素版、dijkstra堆優化、Bellman算法、Bellman隊列優化(SPFA) 都是單源最短路,即只能有一個起點。
而本題是多源最短路,即 求多個起點到多個終點的多條最短路徑。
通過本題,我們來系統講解一個新的最短路算法-Floyd 算法。
Floyd 算法對邊的權值正負沒有要求,都可以處理。
Floyd算法核心思想是動態規劃。
例如我們再求節點1 到 節點9 的最短距離,用二維數組來表示即:grid[1][9],如果最短距離是10 ,那就是 grid[1][9] = 10。
那 節點1 到 節點9 的最短距離 是不是可以由 節點1 到節點5的最短距離 + 節點5到節點9的最短距離組成呢?
即 grid[1][9] = grid[1][5] + grid[5][9]
節點1 到節點5的最短距離 是不是可以有 節點1 到 節點3的最短距離 + 節點3 到 節點5 的最短距離組成呢?
即 grid[1][5] = grid[1][3] + grid[3][5]
以此類推,節點1 到 節點3的最短距離 可以由更小的區間組成。
那么這樣我們是不是就找到了,子問題推導求出整體最優方案的遞歸關系呢。
節點1 到 節點9 的最短距離 可以由 節點1 到節點5的最短距離 + 節點5到節點9的最短距離組成, 也可以有 節點1 到節點7的最短距離 + 節點7 到節點9的最短距離的距離組成。
那么選哪個呢?
是不是 要選一個最小的,畢竟是求最短路。
此時我們已經接近明確遞歸公式了。
之前在講解動態規劃的時候,給出過動規五部曲:
- 確定dp數組(dp table)以及下標的含義
- 確定遞推公式
- dp數組如何初始化
- 確定遍歷順序
- 舉例推導dp數組
那么接下來我們還是用這五部來給大家講解 Floyd。
1、確定dp數組(dp table)以及下標的含義
這里我們用 grid數組來存圖,那就把dp數組命名為 grid。
grid[i][j][k] = m,表示 節點i 到 節點j 以[1…k] 集合為中間節點的最短距離為m。
可能有錄友會想,憑什么就這么定義呢?
節點i 到 節點j 的最短距離為m,這句話可以理解,但 以[1…k]集合為中間節點就理解不遼了。
節點i 到 節點j 的最短路徑中 一定是經過很多節點,那么這個集合用[1…k] 來表示。
你可以反過來想,節點i 到 節點j 中間一定經過很多節點,那么你能用什么方式來表述中間這么多節點呢?
所以 這里的k不能單獨指某個節點,k 一定要表示一個集合,即[1…k] ,表示節點1 到 節點k 一共k個節點的集合。
2、確定遞推公式
在上面的分析中我們已經初步感受到了遞推的關系。
我們分兩種情況:
- 節點i 到 節點j 的最短路徑經過節點k
- 節點i 到 節點j 的最短路徑不經過節點k
對于第一種情況,grid[i][j][k] = grid[i][k][k - 1] + grid[k][j][k - 1]?
節點i 到 節點k 的最短距離 是不經過節點k,中間節點集合為[1…k-1],所以 表示為grid[i][k][k - 1]?
節點k 到 節點j 的最短距離 也是不經過節點k,中間節點集合為[1…k-1],所以表示為 grid[k][j][k - 1]?
第二種情況,grid[i][j][k] = grid[i][j][k - 1]?
如果節點i 到 節點j的最短距離 不經過節點k,那么 中間節點集合[1…k-1],表示為 grid[i][j][k - 1]?
因為我們是求最短路,對于這兩種情況自然是取最小值。
即: grid[i][j][k] = min(grid[i][k][k - 1] + grid[k][j][k - 1], grid[i][j][k - 1])?
3、dp數組如何初始化
grid[i][j][k] = m,表示 節點i 到 節點j 以[1…k] 集合為中間節點的最短距離為m。
剛開始初始化k 是不確定的。
例如題目中只是輸入邊(節點2 -> 節點6,權值為3),那么grid[2][6][k] = 3,k需要填什么呢?
把k 填成1,那如何上來就知道 節點2 經過節點1 到達節點6的最短距離是多少 呢。
所以 只能 把k 賦值為 0,本題 節點0 是無意義的,節點是從1 到 n。
這樣我們在下一輪計算的時候,就可以根據 grid[i][j][0] 來計算 grid[i][j][1],此時的 grid[i][j][1] 就是 節點i 經過節點1 到達 節點j 的最小距離了。
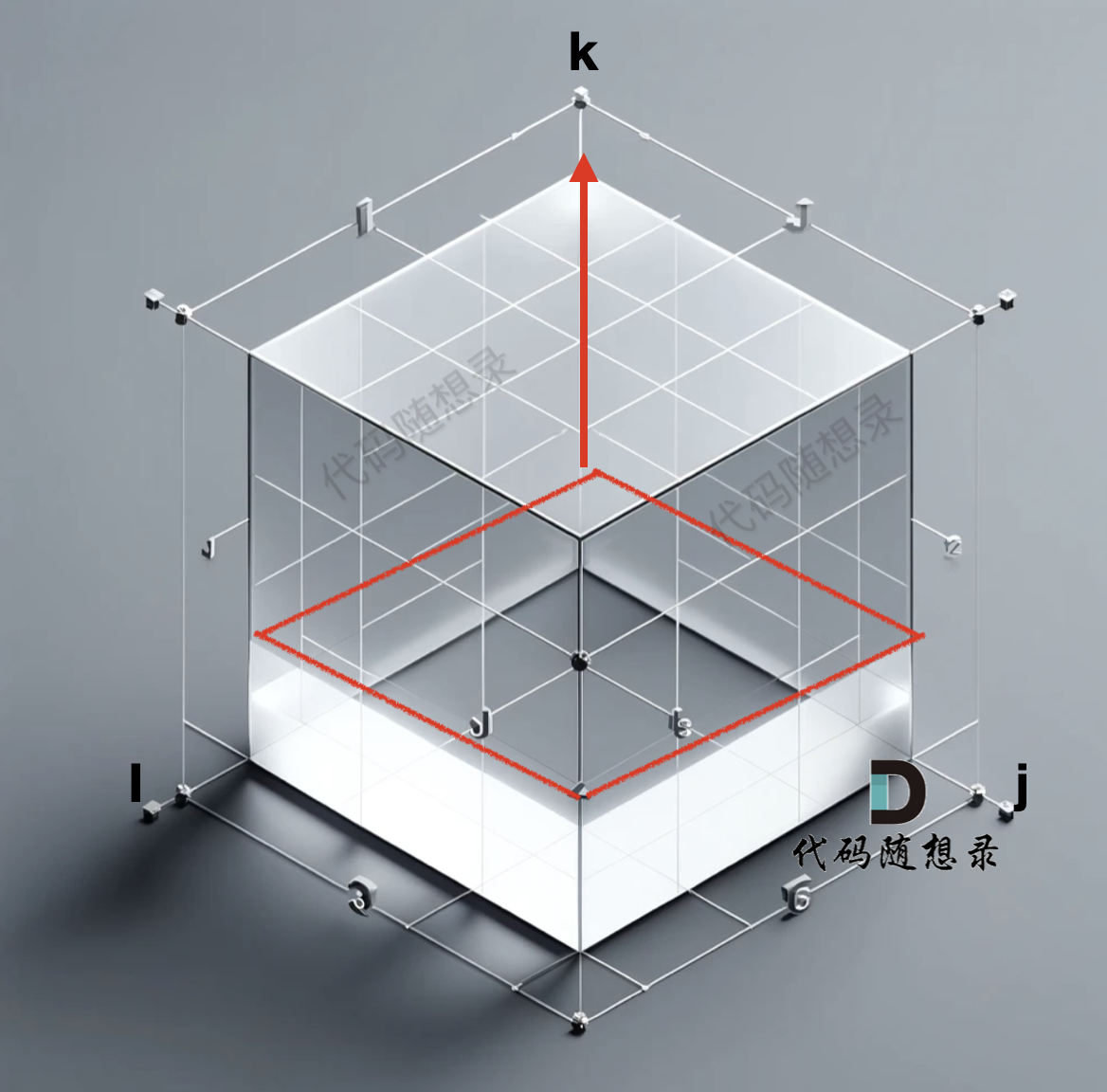
grid數組是一個三維數組,那么我們初始化的數據在 i 與 j 構成的平層,如圖:
?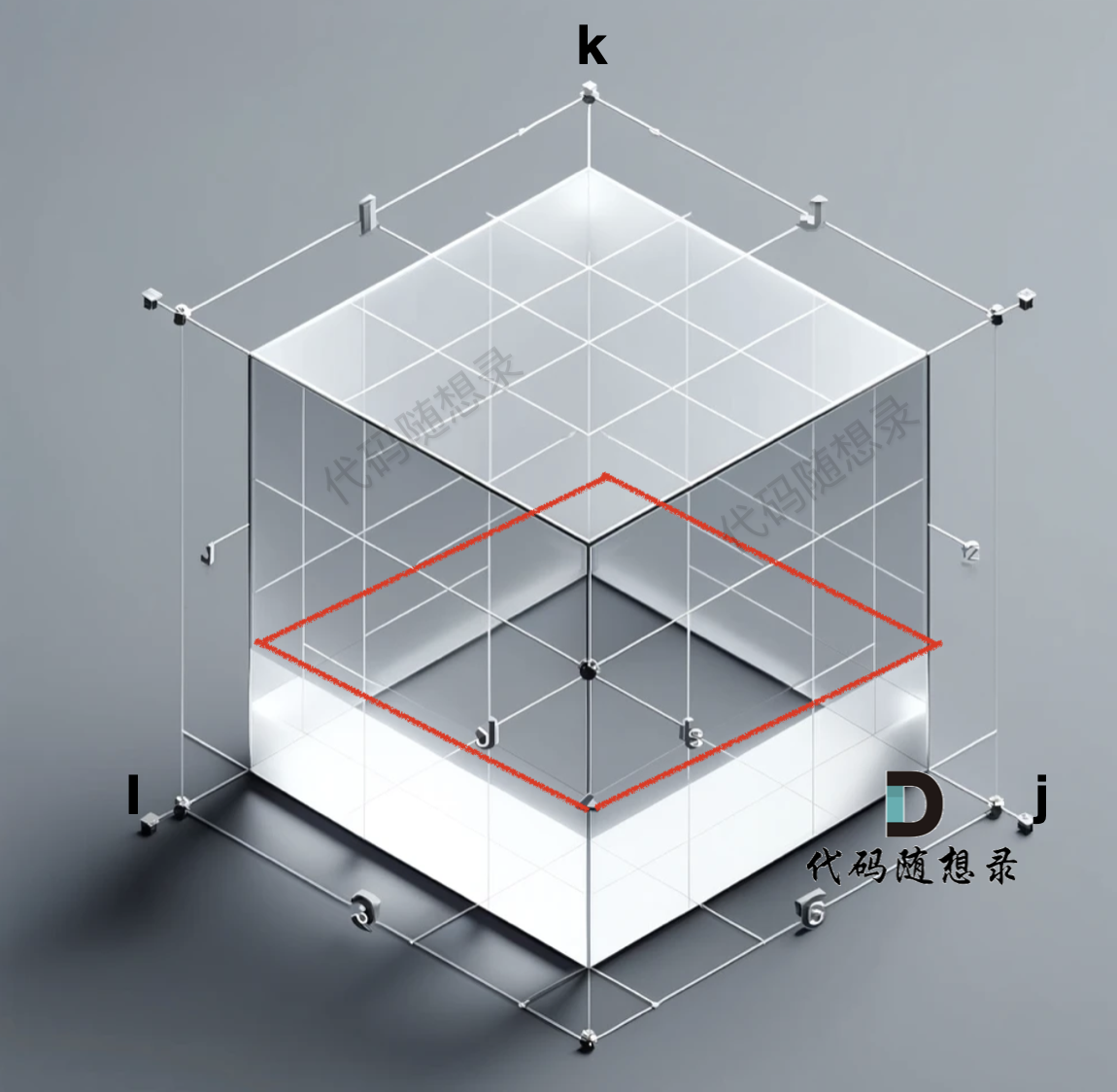 ?
?
紅色的 底部一層是我們初始化好的數據,注意:從三維角度去看初始化的數據很重要,下面我們在聊遍歷順序的時候還會再講。
所以初始化代碼:
vector<vector<vector<int>>> grid(n + 1, vector<vector<int>>(n + 1, vector<int>(n + 1, 10005))); // C++定義了一個三位數組,10005是因為邊的最大距離是10^4for(int i = 0; i < m; i++){
cin >> p1 >> p2 >> val;
grid[p1][p2][0] = val;
grid[p2][p1][0] = val; // 注意這里是雙向圖
} grid數組中其他元素數值應該初始化多少呢?
本題求的是最小值,所以輸入數據沒有涉及到的節點的情況都應該初始為一個最大數。
這樣才不會影響,每次計算去最小值的時候 初始值對計算結果的影響。
所以grid數組的定義可以是:
// C++寫法,定義了一個三位數組,10005是因為邊的最大距離是10^4
vector<vector<vector<int>>> grid(n + 1, vector<vector<int>>(n + 1, vector<int>(n + 1, 10005))); 4、確定遍歷順序
從遞推公式:grid[i][j][k] = min(grid[i][k][k - 1] + grid[k][j][k - 1], grid[i][j][k - 1])? 可以看出,我們需要三個for循環,分別遍歷i,j 和k
而 k 依賴于 k - 1, i 和j 的到 并不依賴與 i - 1 或者 j - 1 等等。
那么這三個for的嵌套順序應該是什么樣的呢?
我們來看初始化,我們是把 k =0 的 i 和j 對應的數值都初始化了,這樣才能去計算 k = 1 的時候 i 和 j 對應的數值。
這就好比是一個三維坐標,i 和j 是平層,而k 是 垂直向上 的。
遍歷的順序是從底向上 一層一層去遍歷。
所以遍歷k 的for循環一定是在最外面,這樣才能一層一層去遍歷。如圖:
? ?
?
至于遍歷 i 和 j 的話,for 循環的先后順序無所謂。
代碼如下:
for (int k = 1; k <= n; k++) {
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
grid[i][j][k] = min(grid[i][j][k-1], grid[i][k][k-1] + grid[k][j][k-1]);
}
}
}
有錄友可能想,難道 遍歷k 放在最里層就不行嗎?
k 放在最里層,代碼是這樣:
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
for (int k = 1; k <= n; k++) {
grid[i][j][k] = min(grid[i][j][k-1], grid[i][k][k-1] + grid[k][j][k-1]);
}
}
}
此時就遍歷了 j 與 k 形成一個平面,i 則是縱面,那遍歷 就是這樣的:
?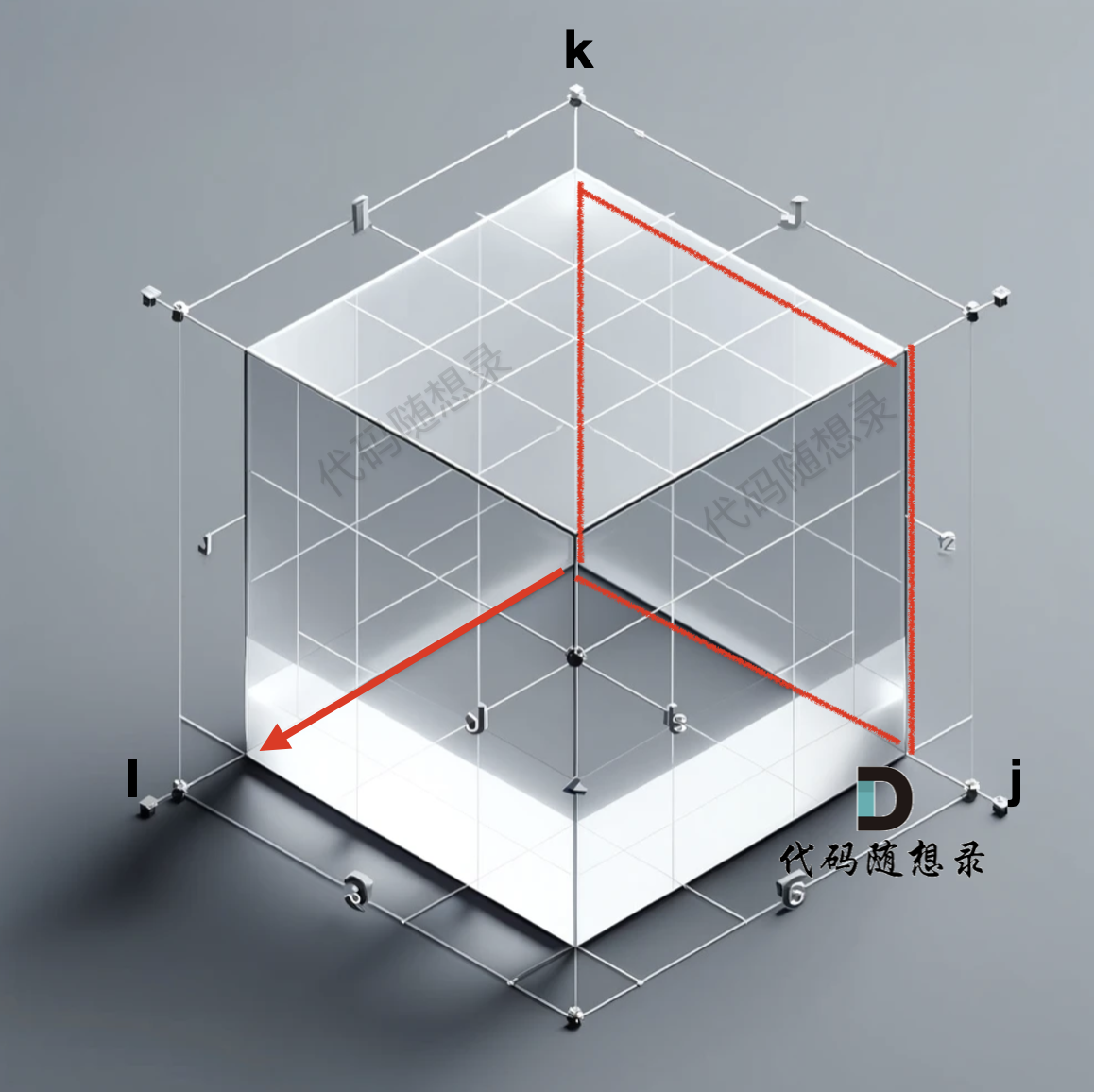 ?
?
而我們初始化的數據 是 k 為0, i 和 j 形成的平面做初始化,如果以 k 和 j 形成的平面去一層一層遍歷,就造成了 遞推公式 用不上上一輪計算的結果,從而導致結果不對(初始化的部分是 i 與j 形成的平面,在初始部分有講過)。
我再給大家舉一個測試用例
5 4
1 2 10
1 3 1
3 4 1
4 2 1
1
1 2
就是圖:
?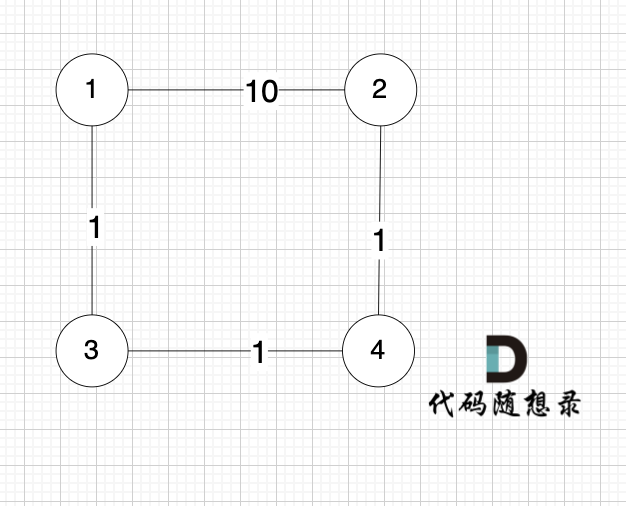 ?
?
求節點1 到 節點 2 的最短距離,運行結果是 10 ,但正確的結果很明顯是3。
為什么呢?
因為 k 放在最里面,先就把 節點1 和 節點 2 的最短距離就確定了,后面再也不會計算節點 1 和 節點 2的距離,同時也不會基于 初始化或者之前計算過的結果來計算,即:不會考慮 節點1 到 節點3, 節點3 到節點 4,節點4到節點2 的距離。
造成這一原因,是 在三維立體坐標中, 我們初始化的是 i 和 i 在k 為0 所構成的平面,但遍歷的時候 是以 j 和 k構成的平面以 i 為垂直方向去層次遍歷。
而遍歷k 的for循環如果放在中間呢,同樣是 j 與k 行程一個平面,i 是縱面,遍歷的也是這樣:
??
同樣不能完全用上初始化 和 上一層計算的結果。
根據這個情況再舉一個例子:
5 2
1 2 1
2 3 10
1
1 3
圖:
?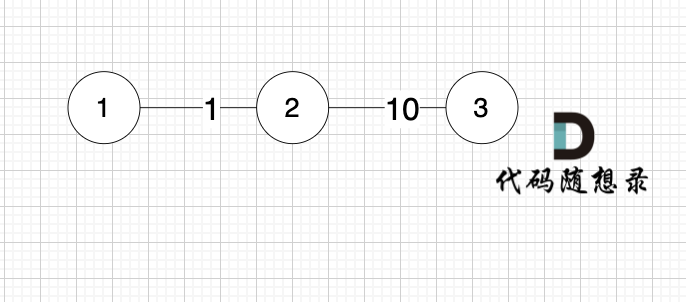 ?
?
求 節點1 到節點3 的最短距離,如果k循環放中間,程序的運行結果是 -1,也就是不能到達節點3。
在計算 grid[i][j][k] 的時候,需要基于 grid[i][k][k-1] 和 grid[k][j][k-1]的數值。
也就是 計算 grid[1][3][2] (表示節點1 到 節點3,經過節點2) 的時候,需要基于 grid[1][2][1] 和 grid[2][3][1]的數值,而 我們初始化,只初始化了 k為0 的那一層。
造成這一原因 依然是 在三維立體坐標中, 我們初始化的是 i 和 j 在k 為0 所構成的平面,但遍歷的時候 是以 j 和 k構成的平面以 i 為垂直方向去層次遍歷。
很多錄友對于 floyd算法的遍歷順序搞不懂,其實 是沒有從三維的角度去思考,同時我把三維立體圖給大家畫出來,遍歷順序標出來,大家就很容易想明白,為什么 k 放在最外層 才能用上 初始化和上一輪計算的結果了。
5、舉例推導dp數組
這里涉及到 三維矩陣,可以一層一層打印出來去分析,例如k=0 的這一層,k = 1的這一層,但一起把三維帶數據的圖畫出來其實不太好畫。
#代碼如下
以上分析完畢,最后代碼如下:
#include <iostream>
#include <vector>
#include <list>
using namespace std;int main() {
int n, m, p1, p2, val;
cin >> n >> m;vector<vector<vector<int>>> grid(n + 1, vector<vector<int>>(n + 1, vector<int>(n + 1, 10005))); // 因為邊的最大距離是10^4
for(int i = 0; i < m; i++){
cin >> p1 >> p2 >> val;
grid[p1][p2][0] = val;
grid[p2][p1][0] = val; // 注意這里是雙向圖}
// 開始 floyd
for (int k = 1; k <= n; k++) {
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
grid[i][j][k] = min(grid[i][j][k-1], grid[i][k][k-1] + grid[k][j][k-1]);
}
}
}
// 輸出結果
int z, start, end;
cin >> z;
while (z--) {
cin >> start >> end;
if (grid[start][end][n] == 10005) cout << -1 << endl;
else cout << grid[start][end][n] << endl;
}
}#空間優化
這里 我們可以做一下 空間上的優化,從滾動數組的角度來看,我們定義一個 grid[n + 1][ n + 1][2] 這么大的數組就可以,因為k 只是依賴于 k-1的狀態,并不需要記錄k-2,k-3,k-4 等等這些狀態。
那么我們只需要記錄 grid[i][j][1] 和 grid[i][j][0] 就好,之后就是 grid[i][j][1] 和 grid[i][j][0] 交替滾動。
在進一步想,如果本層計算(本層計算即k相同,從三維角度來講) gird[i][j] 用到了 本層中剛計算好的 grid[i][k] 會有什么問題嗎?
如果 本層剛計算好的 grid[i][k] 比上一層 (即k-1層)計算的 grid[i][k] 小,說明確實有 i 到 k 的更短路徑,那么基于 更小的 grid[i][k] 去計算 gird[i][j] 沒有問題。
如果 本層剛計算好的 grid[i][k] 比上一層 (即k-1層)計算的 grid[i][k] 大, 這不可能,因為這樣也不會做更新 grid[i][k]的操作。
所以本層計算中,使用了本層計算過的 grid[i][k] 和 grid[k][j] 是沒問題的。
那么就沒必要區分,grid[i][k] 和 grid[k][j] 是 屬于 k - 1 層的呢,還是 k 層的。
所以遞歸公式可以為:
grid[i][j] = min(grid[i][j], grid[i][k] + grid[k][j]);
基于二維數組的本題代碼為:
#include <iostream>
#include <vector>
using namespace std;int main() {
int n, m, p1, p2, val;
cin >> n >> m;vector<vector<int>> grid(n + 1, vector<int>(n + 1, 10005)); // 因為邊的最大距離是10^4for(int i = 0; i < m; i++){
cin >> p1 >> p2 >> val;
grid[p1][p2] = val;
grid[p2][p1] = val; // 注意這里是雙向圖}
// 開始 floyd
for (int k = 1; k <= n; k++) {
for (int i = 1; i <= n; i++) {
for (int j = 1; j <= n; j++) {
grid[i][j] = min(grid[i][j], grid[i][k] + grid[k][j]);
}
}
}
// 輸出結果
int z, start, end;
cin >> z;
while (z--) {
cin >> start >> end;
if (grid[start][end] == 10005) cout << -1 << endl;
else cout << grid[start][end] << endl;
}
}- 時間復雜度: O(n^3)
- 空間復雜度:O(n^2)
#總結
本期如果上來只用二維數組來講的話,其實更容易,但遍歷順序那里用二維數組其實是講不清楚的,所以我直接用三維數組來講,目的是將遍歷順序這里講清楚。
理解了遍歷順序才是floyd算法最精髓的地方。
floyd算法的時間復雜度相對較高,適合 稠密圖且源點較多的情況。
如果是稀疏圖,floyd是從節點的角度去計算了,例如 圖中節點數量是 1000,就一條邊,那 floyd的時間復雜度依然是 O(n^3) 。
如果 源點少,其實可以 多次dijsktra 求源點到終點。


)








)







