創作原因:偶然有機會接觸到基于Arduino平臺的開源智能小車,初步使用后與大家分享。因使用時間不常,可以純當個樂子看看,感謝大家的閱讀!
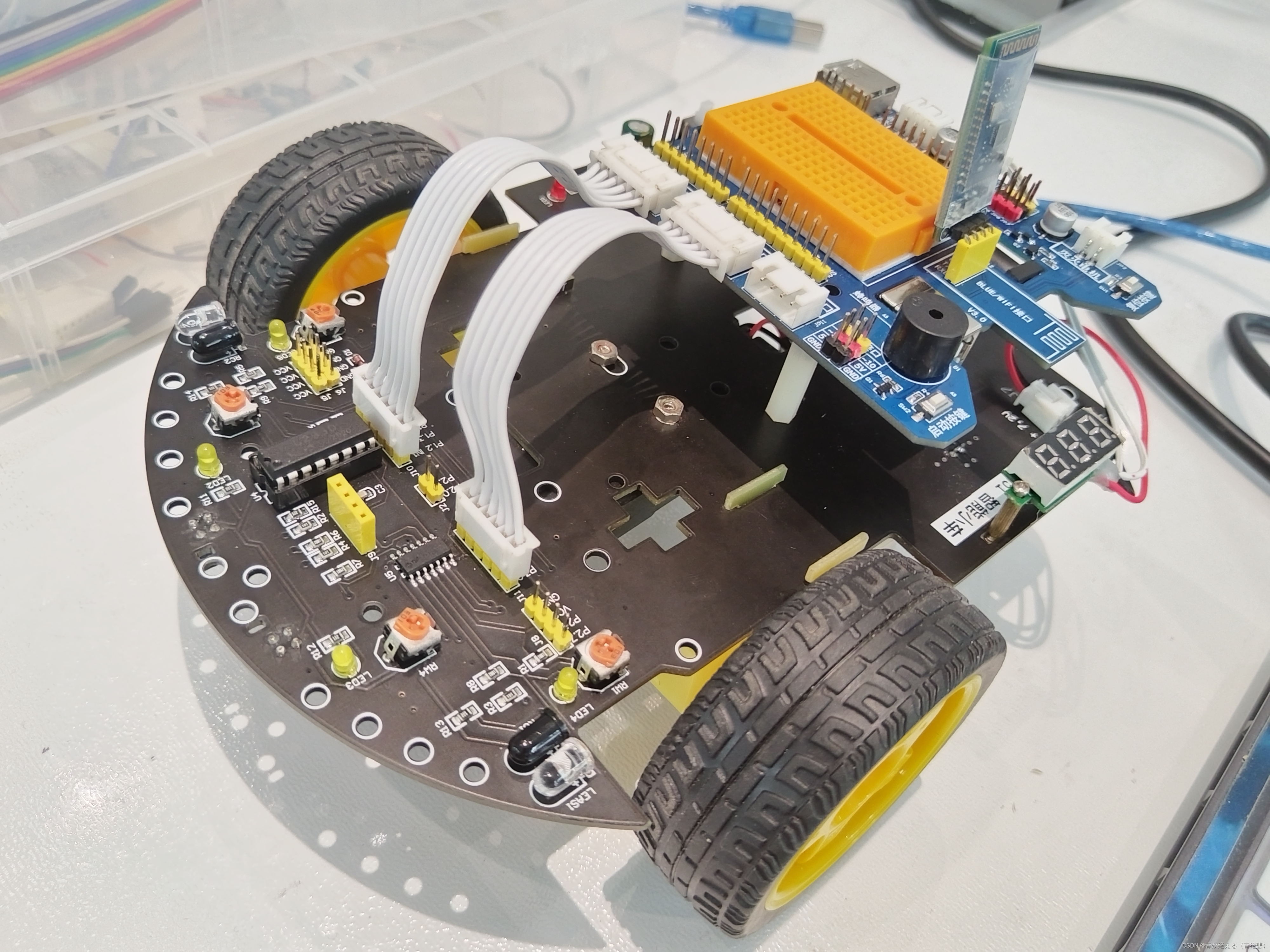
?圖:一款基于Arduino平臺的開源小車
一、開發環境
- Misly:圖形化編程軟件,適配該型號智慧小車。
- arduino:C語言開發,對智慧小車進行編程,本次未使用。
- 網頁端移動開發(http://app.gzjkw.net/):移動端軟件快捷開發,圖形化編程,適用于大部分安卓手機。
二、基本硬件
該型號小車原配備帶舵機的超聲波模塊,本次使用并未安裝。其余硬件如下圖:
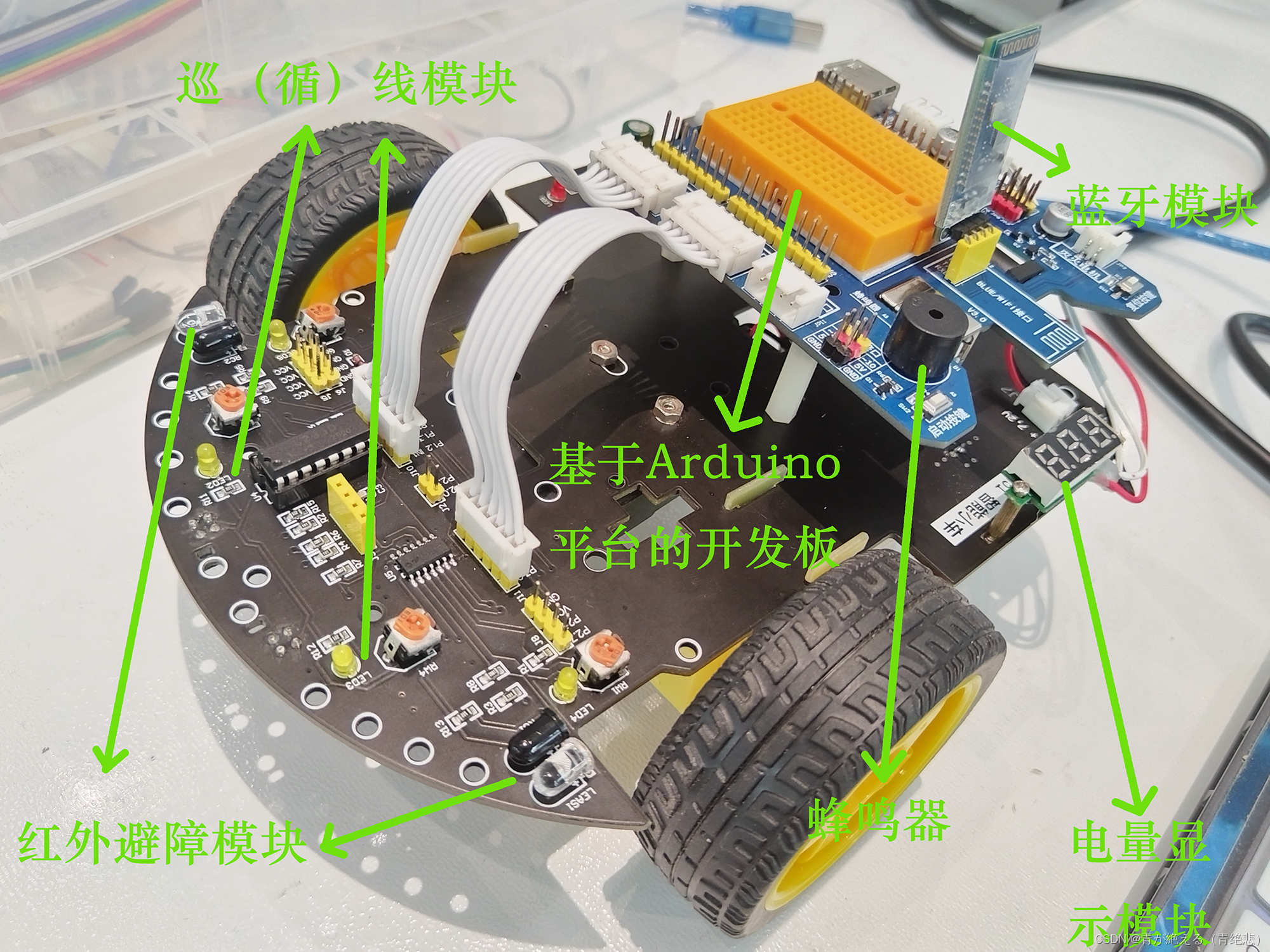
?圖:標注了基本硬件的智慧小車
三、代碼開發
(1)智慧小車部分代碼
本次智慧小車代碼主要分為三個部分,即信號連接與接收部分、自主避障部分和解析遙控信號部分。
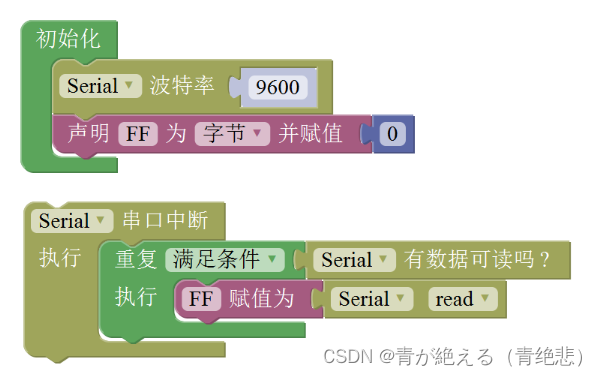
信號連接與接收部分代碼:
?自主避障部分代碼:

解析遙控信號部分代碼:

寫好以上代碼后連接智慧小車(注意需要拔下藍牙模塊),先后點擊保存、編譯與上傳,上傳成功之后即可拔下數據線并插上藍牙模塊。
(2)移動端軟件代碼
軟件代碼相比于小車代碼會略微難,主要有界面設計、代碼設計和測試調試等步驟。
界面設計:

圖:基本界面設計樣式
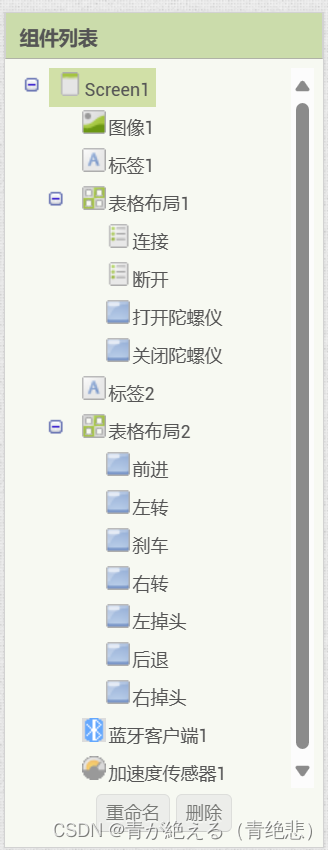
圖:組件列表
代碼設計:
?軟件代碼本身又分幾個板塊,主要是藍牙連接板塊、斷開藍牙板塊、陀螺儀按鍵可執行性板塊、陀螺儀控制發信板塊、按鈕控制發信板塊,具體如下多圖。
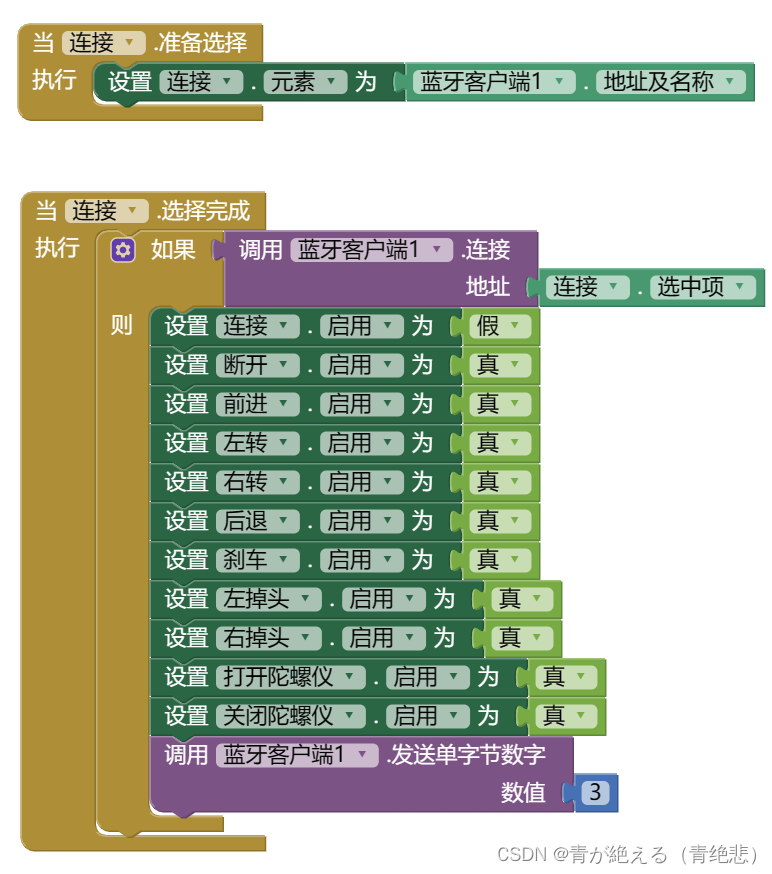
?圖:藍牙連接板塊
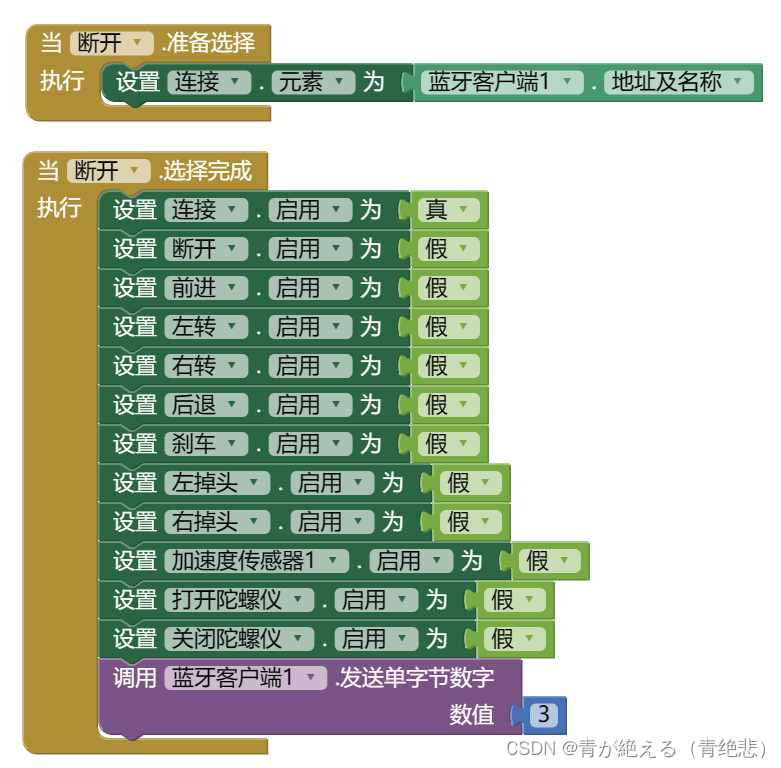
?圖:斷開連接模塊
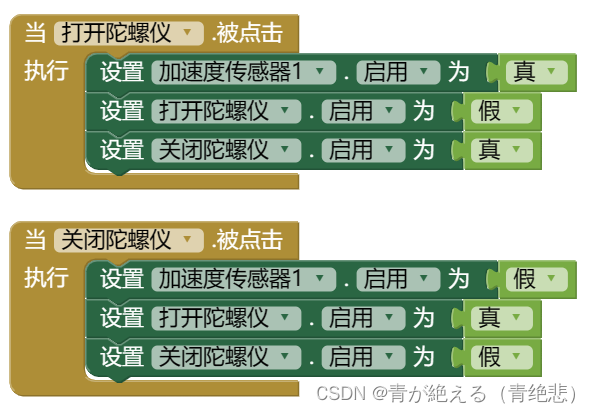
?圖:陀螺儀按鍵可執行性板塊

圖:?按鈕控制發信板塊
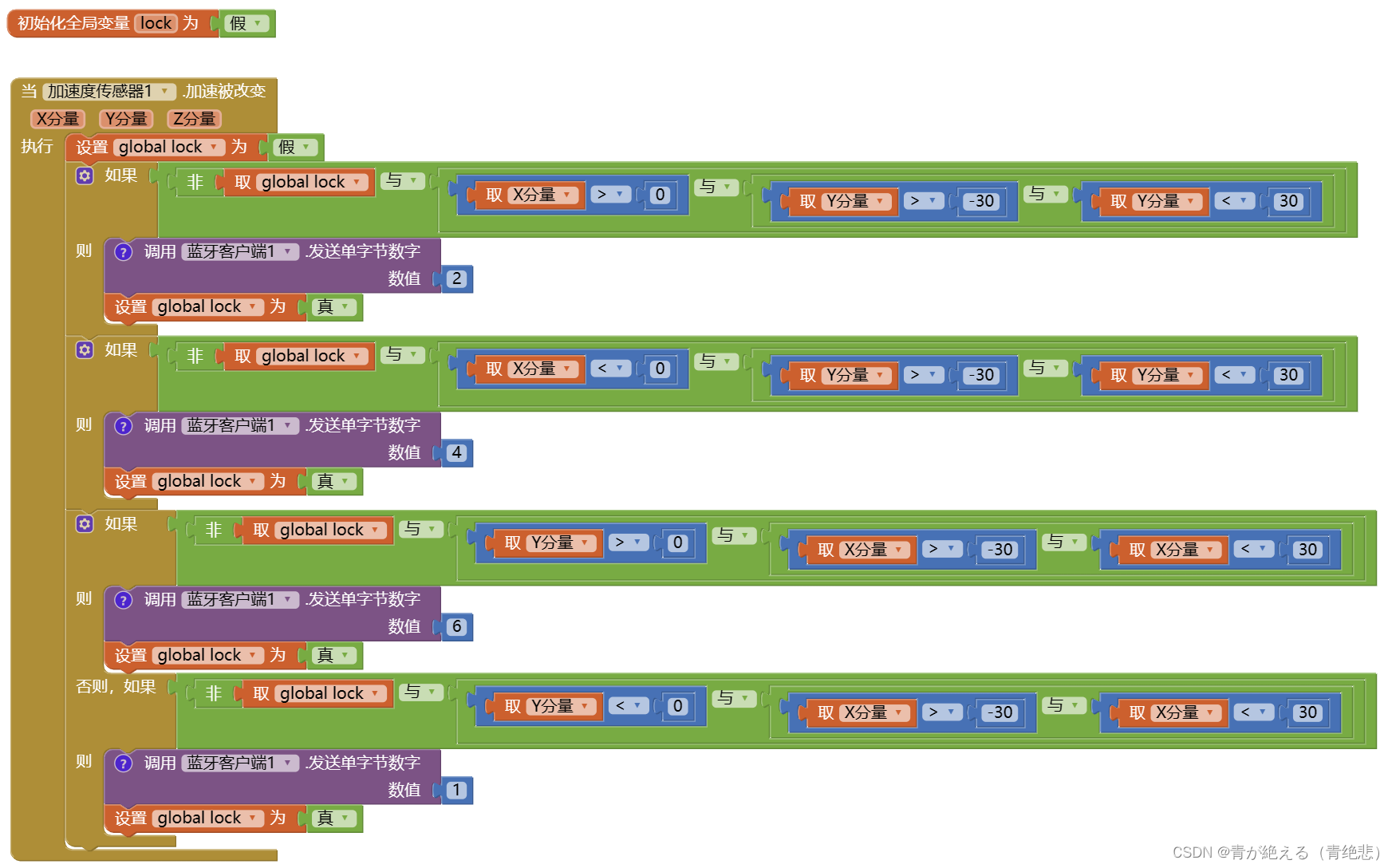
圖:?陀螺儀控制發信板塊
完成后點擊網頁界面左上角的“打包apk”,自選方式將軟件安裝到手機,注意要允許獲取手機權限。
四、基本使用步驟
1.按下智慧小車上的物理按鍵開關,啟動小車。
2.確認藍牙模塊正常運行后,打開手機藍牙,與藍牙模塊進行配對,若已配對過則這一步直接跳過。
3.打開開發的移動控制端,點擊“連接”按鈕,讓軟件與智慧小車進行連接,如下圖。
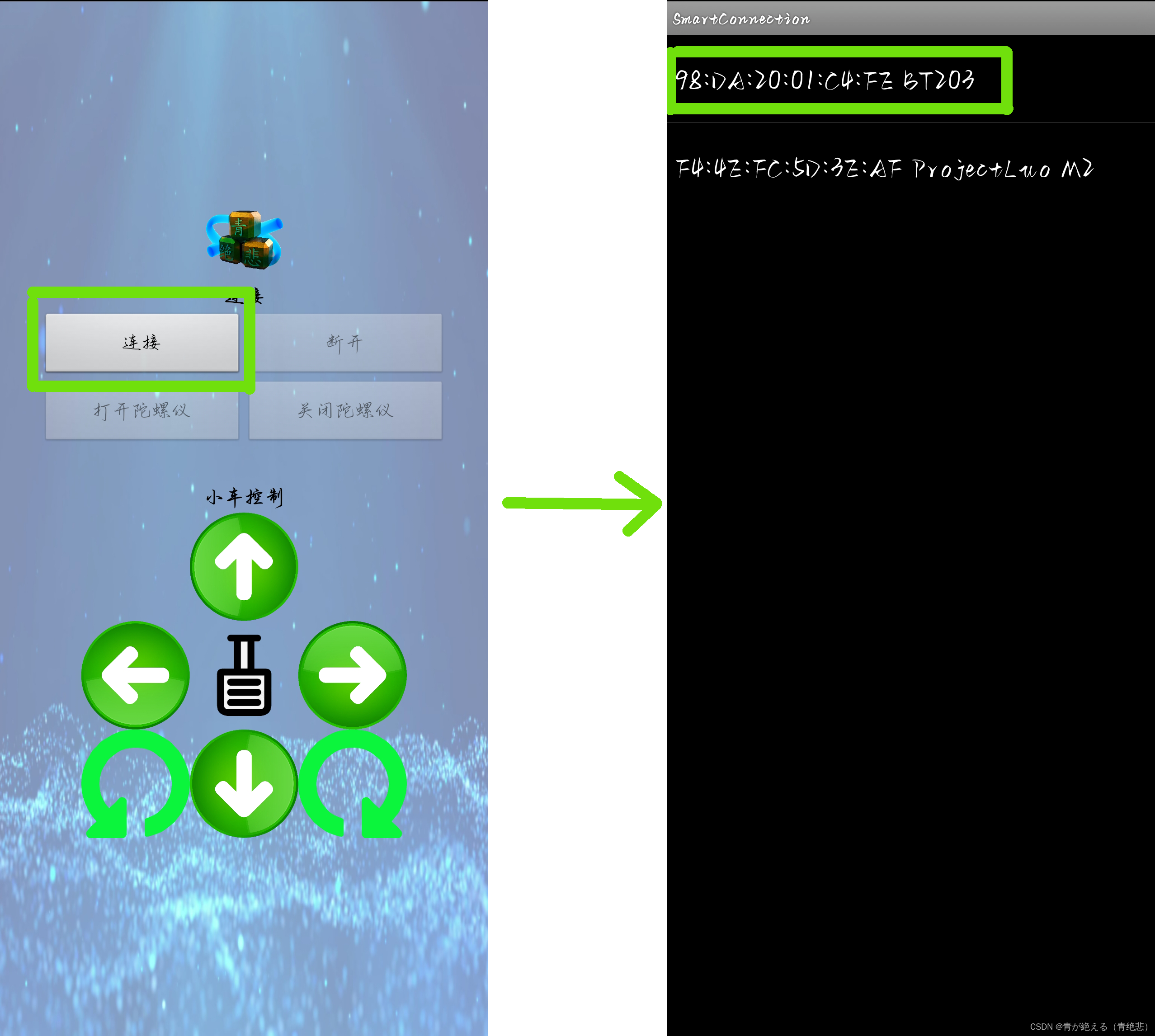
4.完成連接后軟件會返回主界面,若連接成功則可以直接點擊下方按鈕控制小車運動狀態,包括:前進、后退、左轉、右轉、原地左旋轉、原地右旋轉、剎車。
5.手機陀螺儀默認關閉,點擊“打開陀螺儀”按鈕打開,可通過手機姿態控制小車狀態,點擊“關閉陀螺儀”可以退出該狀態。
6.點擊“斷開”后軟件自動斷開與智慧小車的連接并結束運行(不會退出,請手動退出)。
五、下載鏈接
?對于遇到該博客的朋友,如果您的智慧小車恰巧是該型號且您是初學者,歡迎您點擊下方按鈕免費下載本帖子所包含的:Mixly智慧小車代碼、移動端控制軟件安裝包。這兩個文件將會包含在一個壓縮包內。
免費下載地址:
CSDN下載:https://download.csdn.net/download/qq_64516527/89515569
百度網盤下載:https://pan.baidu.com/s/1LL6ggIs3I5-V6kcFPVhFHA?pwd=54r7?提取碼:54r7
123云盤下載:https://www.123pan.com/s/Il2bVv-SW3Qh.html

)








)
含源代碼)

)


)


