文章目錄
1. 概念
1.1 PID框圖
1.2 具體示例:無人機高度控制
2. PID原理
3. 常用術語
4. 計算過程
4.1 比例控制(Proportional)
4.2 積分控制(Integral)
4.3 微分控制(Derivative)
5. 代碼實現邏輯
7. 串級PID和代碼實現
6. 模擬仿真
1. 概念
PID是應用最廣泛的閉環控制方法之一,是一種常用的反饋控制方法,對于每個PID控制器由三個部分組成:比例控制(Proportional)、積分控制(Integral)和微分控制(Derivative)。
一般而言,目標值和反饋值為同種物理量,輸出值可以是施加在被控物體上的控制量
舉例:對物體進行位置控制時,目標值=目標位置,反饋值=當前位置,輸出值=施加的驅動力大小,PID就能實時計算出驅動力使物體到達目標位置。
控制程序一般會定時運行PID算法,在每次運行時,先計算出誤差=目標值-反饋值,然后分別由P、I、D三個環節根據誤差計算出輸出分量,三個分量加和即為最終輸出值。
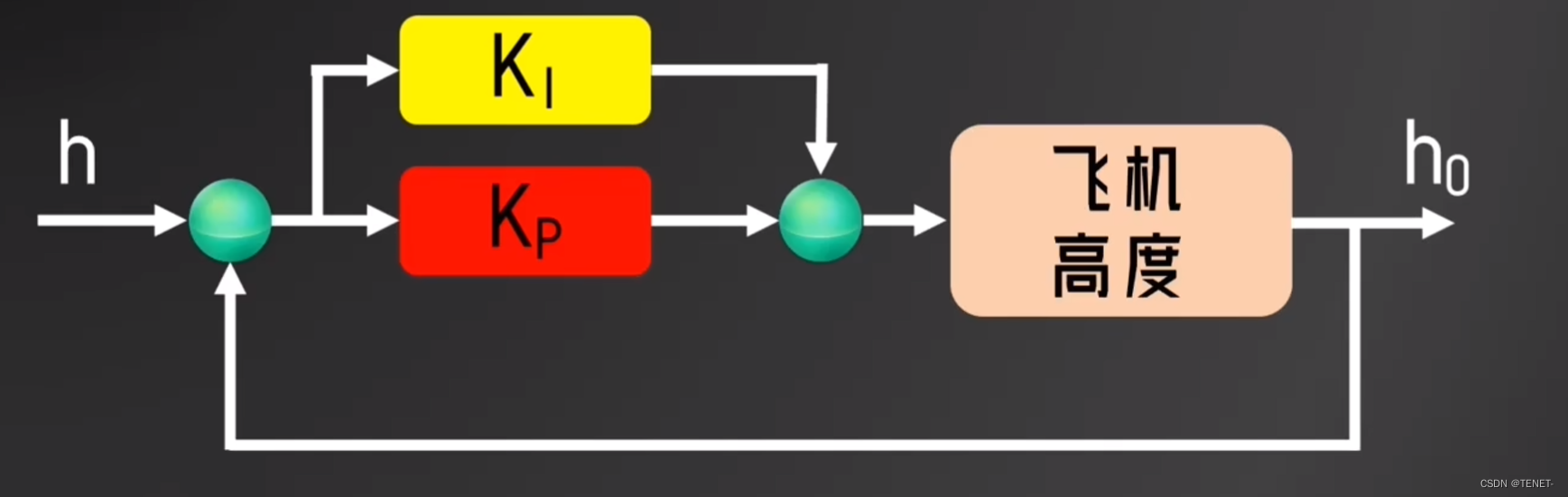
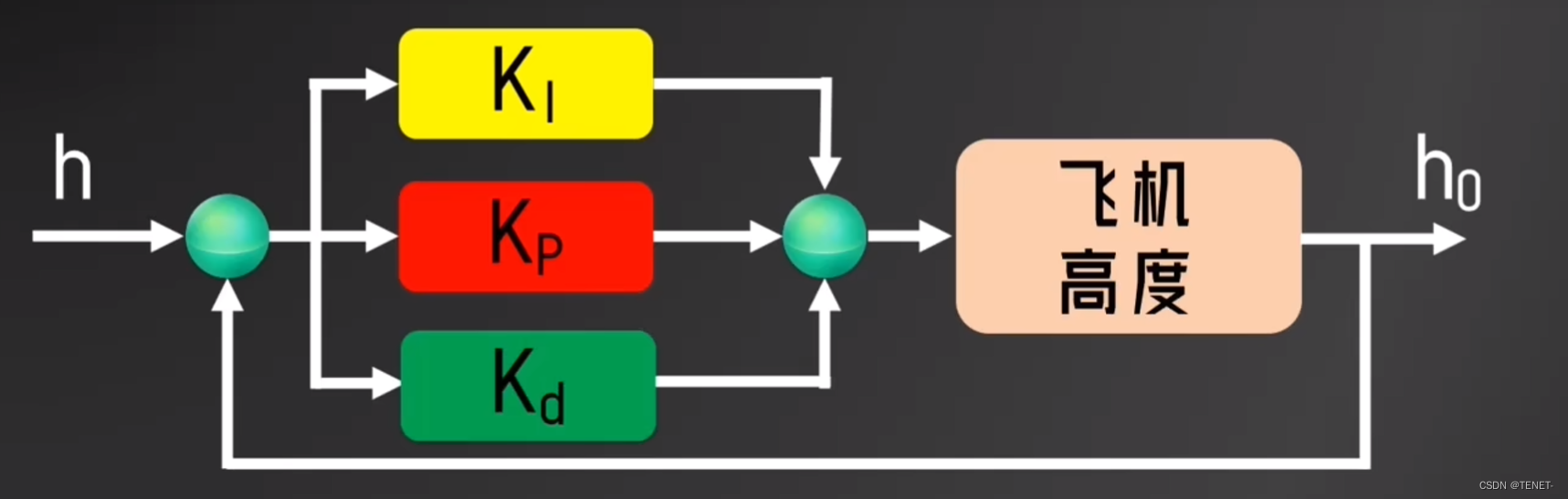
1.1 PID框圖
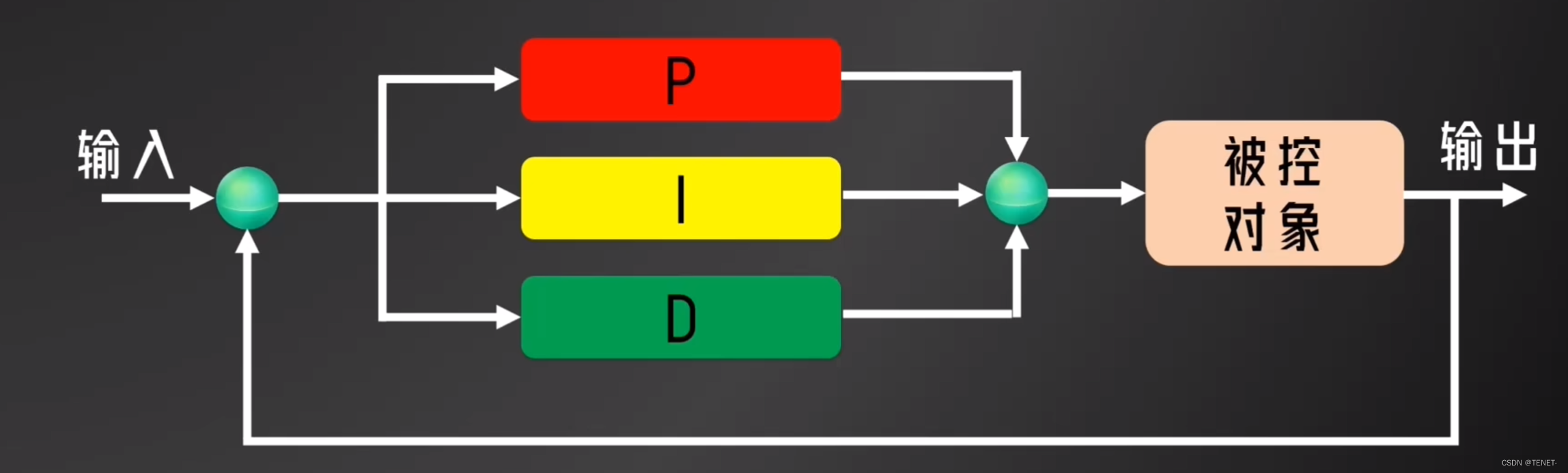
上圖就是PID的信號框圖,表示了PID的運行過程:
為系統指定一個目標值。PID將目標值與被控對象(無人機)當前的反饋量作差得到誤差。PID將誤差值分別經過三個環節計算得到輸出分量,三個分量加起來得到PID的輸出。將PID的輸出施加到被控對象上,使反饋量向目標值靠攏。
PID三個環節的作用
由控制無人機案例我們可以總結出PID三個環節各自的主要作用和效應:
-
比例環節:起主要控制作用,使反饋量向目標值靠攏,但可能導致振蕩。
-
積分環節:消除穩態誤差,但會增加超調量。
-
微分環節:產生阻尼效果,抑制振蕩和超調,但會降低響應速度。
PID中物理量的設計
我們在設計PID時主要關注三個量:目標值、反饋值、輸出值。PID會根據目標值和反饋值計算輸出值。
需要強調的是,PID并不知道被控對象是什么,它僅負責進行數值計算,而我們——作為控制系統的設計者,就需要為PID指定這三個量所對應的實際物理量,這在不同的控制系統中是不一樣的。
如何確定實際物理量
我為大家總結了一個常用準則:
- 目標值和反饋值:
- 通常為同種物理量,就是你需要控制的物理量。
- 輸出值:
- 通常是直接驅動被控對象的控制量。
- 輸出量作用在被控對象上需要經過時間積累才會產生反饋量的變化,換言之,輸出值通常為反饋值對于時間的低階物理量。例如:目標值和反饋值為位置,則輸出值可以為速度或加速度。
對于線性關系的兩個物理量(只差一個系數),可以直接替換。例如:目標和反饋值為無人機的位置,根據上一條準則,輸出值可以為加速度。但我們無法直接控制加速度,只能控制推力大小,由于由于高度的變化是由推力產生的,且推力與加速度只差一個系數(F=ma),因此可以將輸出值直接定為推力。
?
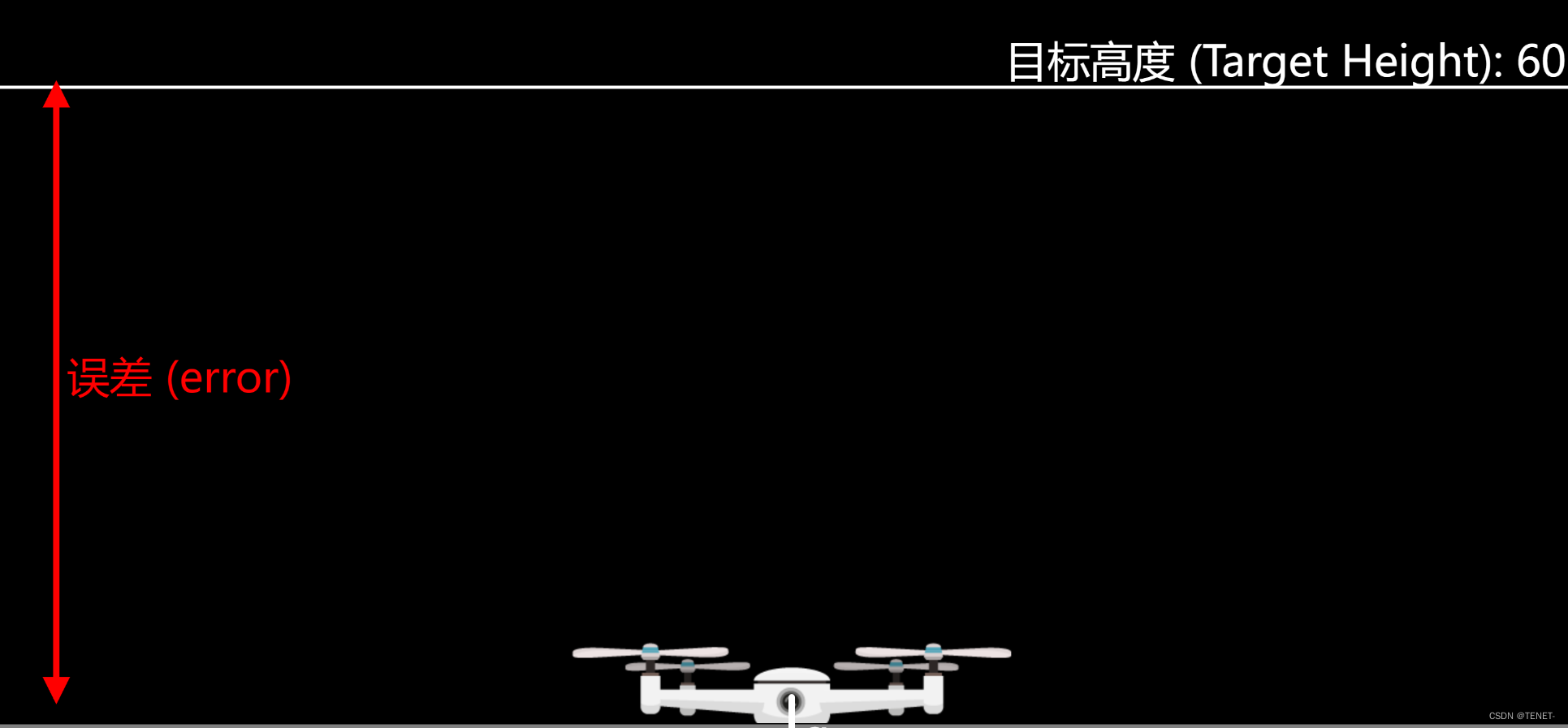
1.2 具體示例:無人機高度控制
-
目標值(Setpoint):無人機希望達到的高度,例如10米。
-
反饋值(Measured Value):無人機當前的實際高度,例如8米。
-
誤差(Error):
- 目標高度與實際高度的差值。誤差 = 目標高度 - 實際高度 = 10米 - 8米 = 2米。
-
輸出值(Output):
- 控制電機的推力大小,以使無人機的高度向目標高度靠攏。
- 由于推力與加速度成正比,我們可以將輸出值設為推力。通過調整推力來改變無人機的加速度,從而改變高度。
2. PID原理
這是一個通過PID控制水管進出水流量的例子。讓我們詳細解釋這個例子:
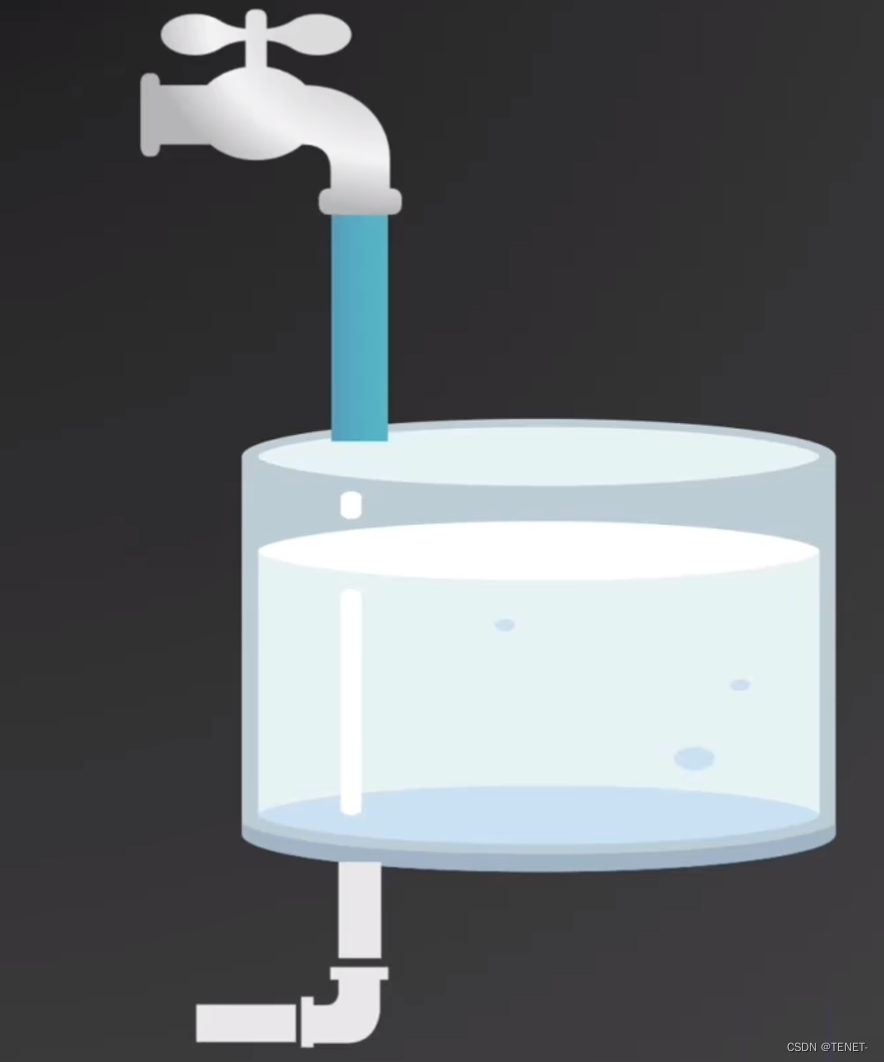
圖示說明
- 閥門:水管中間有一個閥門,通過調節閥門的開度來控制水流量。
- PID控制器:控制系統通過PID控制器來調節閥門,以控制水流量。
- 流量傳感器:水管上有流量傳感器,用來測量當前的實際流量。
工作原理
- 設定值:系統有一個預期流量值(設定值),這是希望達到的水流量。比如2L/S.
- 測量值:流量傳感器實時測量當前的實際流量。
- 誤差計算:PID控制器將實際流量與預期流量進行比較,得到誤差值(誤差 = 預期流量 - 實際流量)。
- 控制輸出:
- 比例控制(P):根據當前誤差值直接調節閥門的開度。誤差越大,調整幅度越大。
- 積分控制(I):根據誤差隨時間的累積來調節閥門,以消除持續的偏差。積分控制能消除系統的穩態誤差。
- 微分控制(D):根據誤差變化的速度來調節閥門,預見并平滑誤差的變化,減少超調和振蕩。
實際操作
- 啟動時:當系統啟動時,PID控制器根據初始誤差進行較大的調整,使流量迅速接近設定值。
- 穩定階段:當實際流量接近設定值時,比例控制器的作用減小,積分控制器確保誤差歸零,微分控制器平滑誤差變化,避免波動。
- 擾動響應:當系統受到外部擾動(如水壓變化)時,PID控制器會重新計算誤差,并調整閥門,以重新達到設定的流量值。
3. 常用術語
- 被控對象:需要控制的對象。例如,溫度控制中的加熱器、速度控制中的電機等。
- 目標值(Setpoint):期望被控對象達到的狀態量。例如,溫度控制中的期望溫度、速度控制中的目標速度。
- 反饋值(Measured Value):被控對象當前時刻的狀態量。例如,當前的溫度、當前的速度。
- 增益(Gain):比例、積分和微分部分的放大系數,分別是Kp、Ki和Kd。
- 輸出量(Output):PID的計算結果,用于調整被控對象的控制力。例如,加熱器的功率、驅動電機的電壓。
- 誤差(Error):目標值與反饋值之間的差異。公式為:誤差 = 目標值 - 反饋值。
- 穩態誤差(Steady-State Error):系統在穩定狀態下仍然存在的誤差。例如,加入干擾后仍存在的誤差。
- 階躍輸入(Step Input):在系統穩定狀態下,目標值發生突然變化。例如,目標溫度從20°C突然升高到25°C。
- 階躍響應(Step Response):階躍輸入后,被控對象的響應狀態,能夠代表系統的控制性能。
- 瞬態響應(Transient Response):系統從初始狀態到達到穩態的過渡過程,包括上升時間、超調量和調節時間等。
- 響應速度(Response Speed):階躍輸入后,被控對象再次到達目標值的速度。
- 超調量(Overshoot):階躍輸入后,被控對象到達目標值后超出目標值的距離。
4. 計算過程
這里用無人機的高度控制來舉例
4.1 比例控制(Proportional)
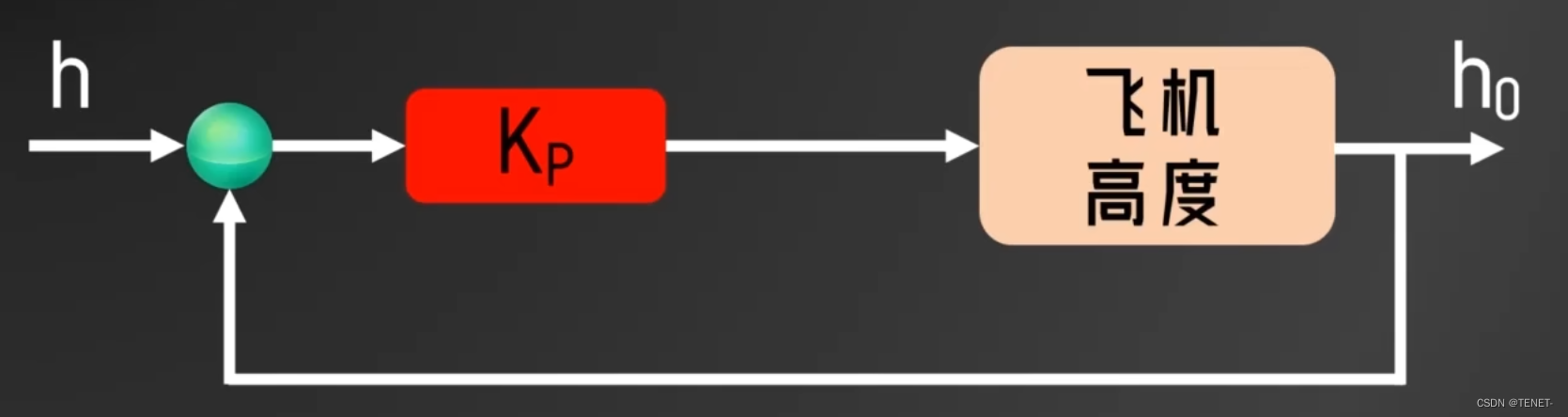
假如讓無人機懸停在10米的高度,但此時高度為2米,所以此時誤差(error)為8米,假設Kp=0.5,比例控制每次調節的高度就為:
Kp * error
所以第一次調節為 0.5*8=4,此時誤差變為4米。
第二次調節:0.5*4=2,此時誤差變為2米。
依次進行調節,誤差逐漸變小。這個過程就叫做比例調節。
Kp值越大,系統反應速度越快,無人機更快靠近誤差。
但是比例控制的缺點為兩點:
- 干擾:容易受到外界干擾,比如此時有持續的風將無人機向下吹,導致無人機同一周期向下1米,此時比例控制的計算結果為0.5*2=1,所以,這會導致無人機永遠保持在八米的高度,誤差保持在2米。這也叫做穩態誤差。
- 震蕩:Kp值越大,系統反應速度越快,無人機更快靠近誤差,但同時無人機在接近目標高度時,產生的震蕩也越嚴重。
為了消除穩態誤差的問題,就需要用到積分控制(Integral)。
為了消除系統震蕩的問題,就需要用到微分控制(Derivative)。
4.2 積分控制(Integral)
積分控制是對之前計算的所有的誤差求和,也就是在離散的情況下做累加,比如無人機經過兩次調節,第一次誤差為8米,第二次誤差為4米,加起來就是12米,假如Ki=0.1,計算結果為:

?0.1*12=1.2,所以及時有向下持續的風影響無人機,由于積分控制,無人機還是會向上走1.2米。
所以積分控制會對誤差進行累計,從而提供更大的升力,讓無人機慢慢的朝著目標點靠近,最終誤差消除為0。
所以經過第三次調節,累計誤差從12調整到了12.8,那么第四次調節的結果0.1*12.8=1.28。
但此時無人機距離目標高度僅為0.8米,如果還是調節1.28米,就會出現過沖現象。
此時就需要使用微分控制進行更細致的調節。
4.3 微分控制(Derivative)
微分控制就是通過當前時刻與前一刻誤差量的差值對未來做預測。如果差值為正,就表示誤差在變大,為負就表示誤差在減小。如果誤差在變大,就會加大控制強度,讓誤差降下來。如果誤差減小,就會減小控制強度,讓無人機平穩緩和的到達指定值。

這里也就相當于對距離求微分:
d(error)/dt = 速度
微分控制算法可以對無人機的速度做出響應,當無人機的速度過快時,微分控制會抵消一部分由比例控制計算出來的升力,從而減緩系統的震蕩。所以當我們提高Kd的值,系統的震蕩會逐步減小。
但無論是比例,積分還是微分控制,數值調的過大,無人機就會出現過沖現象。
5. 代碼實現邏輯
這段偽代碼實現了一個基本的PID控制算法。
previous_error := 0
integral := 0loop:error := setpoint - measured_value //計算誤差integral := integral + error * dt //計算積分derivative := (error - previous_error) / dt //計算微分output := Kp * error + Ki * integral + Kd * derivative //計算控制輸出previous_error := error //更新前一次誤差wait(dt) //等待并循環goto loop
- previous_error 用于存儲前一次循環中的誤差值,初始化為0。
- integral 是積分部分的累加值,初始化為0。
- error 是當前的誤差,等于設定值(setpoint)減去測量值(measured_value)。
- 積分部分通過累加誤差乘以時間步長(dt)來實現。這個部分用于消除系統的穩態誤差。
- 微分部分通過當前誤差減去前一次誤差,再除以時間步長(dt)來實現。這個部分用于預測誤差的變化趨勢,從而提前進行調整。
- 控制輸出(output)是比例、積分和微分三部分的加權和。
- Kp 是比例增益,對應 error。
- Ki 是積分增益,對應 integral。
- Kd 是微分增益,對應 derivative。
- 將當前的誤差值存儲到 previous_error 中,以便下次循環使用。?
這段偽代碼通過不斷地測量誤差、累積積分和計算誤差變化率,動態調整控制輸出,使系統的實際值盡量接近設定值。
7. 串級PID和代碼實現
串級PID可增加系統的穩定性,抗干擾能力更強,包括代碼實現可以看下面這篇:
串級PID控制算原理及法詳解-CSDN博客
6. 模擬仿真
下面這個網站可以模擬調節PID參數來控制無人機
Webpack App



![[A133]uboot啟動流程](http://pic.xiahunao.cn/[A133]uboot啟動流程)



_HTTP基礎知識,HTTP 請求、響應格式,方法,狀態碼)
shell腳本)


】)



上)


)
:Yolov8n模型轉換及量化)