本文檔為一份關于Brushless電機理論的詳細教程,由TYTO Robotics編制,旨在幫助用戶理解brushless電機的工作原理、特性以及如何通過實驗測定其關鍵參數Kv和Kt。文檔首先介紹了brushless電機的基本組成,包括靜止的定子和旋轉的轉子,以及電磁鐵和永久磁鐵的作用機制。接著,文檔深入討論了brushless電機的兩種類型(inrunner和outrunner)及其特點,并解釋了back EMF的概念以及它如何影響電機性能。此外,文檔還提供了計算電機輸入功率、輸出功率、Kv值和Kt值的公式,并指導讀者如何通過實驗測定這些參數。最后,文檔強調了實驗安全措施,并給出了具體的實驗步驟和建議。
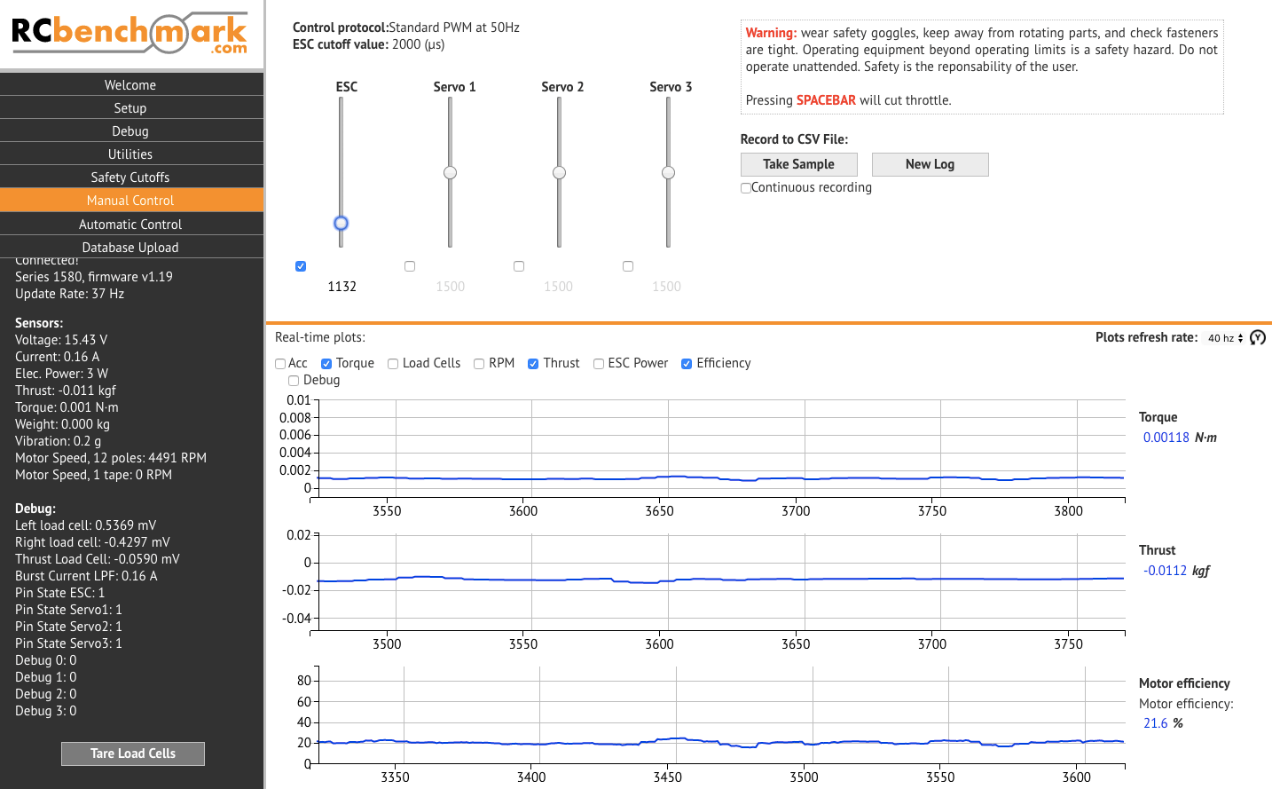
在實驗部分,讀者被引導如何設置實驗環境、安裝電機和電子調速器(ESC)、并使用RCbenchmark軟件進行數據收集。特別地,實驗分為兩步:首先測量電機在無負載情況下的空載轉速(Kv值),然后在不同負載下測量電機的扭矩與電流的關系(Kt值)。通過這些實驗,讀者可以更深入地了解brushless電機的特性和工作原理。
總的來說,這份文檔不僅提供了一系列理論知識,而且結合了具體實驗操作指南,為讀者提供了一個全面學習brushless電機的資源。通過遵循文檔中的指導,讀者不僅可以掌握電機的關鍵參數測定方法,還可以加深對電機內部工作機制的理解。
1、課程關鍵要點
- 電子速度控制器通過脈沖寬度調制將電流轉換為正弦波并發送到電機線圈,以產生電磁場并使其旋轉。
- 電機的轉速由信號的持續時間和開關狀態控制。
- 通過調整電流和電壓來計算電機的輸入功率。
- 安全限制包括電壓、電流、功率、推力、扭矩等參數。
- 影響實際測量值與制造商提供的Kv值差異的因素可能有多種。
2、Brushless電機理論及實驗研究
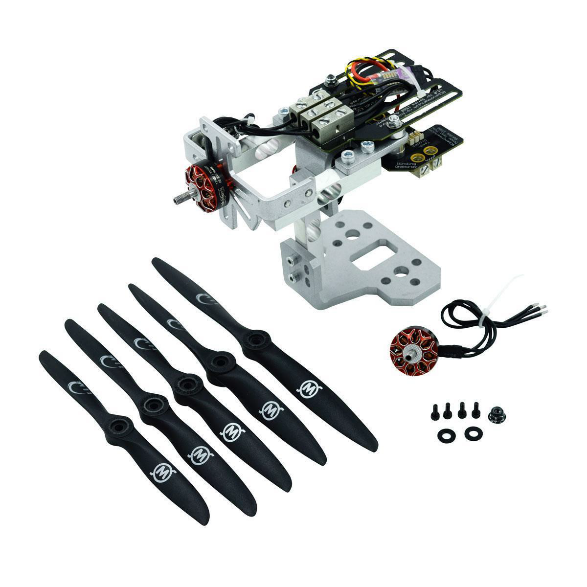
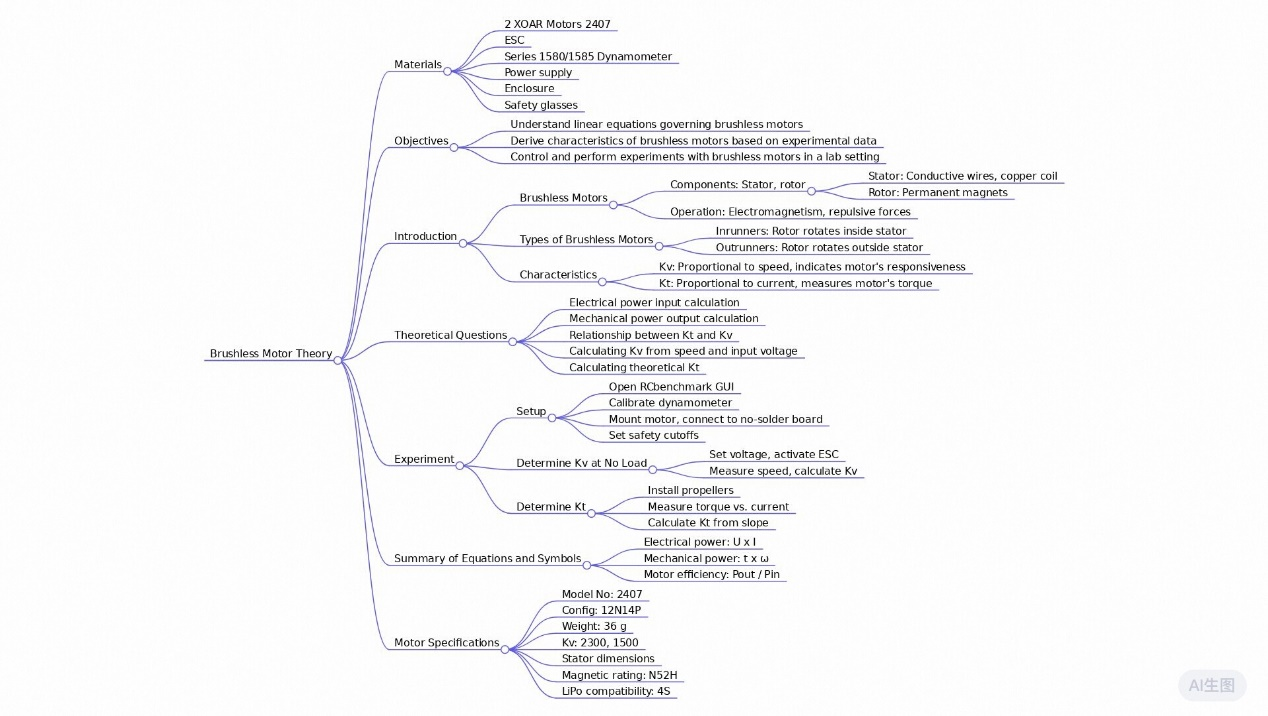
章節介紹了TYTO Robotics的Brushless Motor Theory文檔,包括材料、目標和介紹部分。在介紹部分,詳細解釋了Brushless電機的組成和工作原理,并提供了實驗步驟和所需材料清單。此外,該文檔還包含了一些公式和符號的總結以及電機規格表。總體來說,這是一份關于Brushless電機理論的詳細介紹和指南。
3、了解無刷電機的工作原理
章節介紹了電磁鐵和永久磁鐵的原理以及它們在電動機中的應用。當電流通過導電線圈時,會產生磁場,這就是電磁鐵。而永久磁鐵則是一種自然產生的磁場。電動機利用電磁鐵來產生旋轉力,從而驅動轉子轉動。同時,本文還介紹了兩種不同類型的電動機——內轉子和外轉子,并解釋了它們的工作原理和性能特點。最后,文章提到了一些關于電機設計和使用方面的注意事項。
4、電機反電動勢及其影響因素分析
章節主要介紹了電動機中的反向電磁力(back EMF)的概念和產生原理。當電機無法旋轉時,整個電源輸入被轉換成熱量;而當電機釋放并允許旋轉時,電機的旋轉會產生電路中的電壓,這就是反向電磁力。通過Faraday定律可以解釋這一現象。反向電磁力與電機的轉速成正比,同時會降低電流和扭矩。Kv是電機的一個基本系數,它描述了電機轉速與反向電磁力之間的關系。Kt則是另一個電機系數,用于計算電機的扭矩。
5、電子速度控制器的工作原理與應用
章節主要介紹了電子速度控制器的工作原理和使用方法。通過脈沖寬度調制技術將電流轉化為三相交流電,并控制電機的轉速。同時,該章節還提供了計算電機輸入功率、輸出功率以及Kv值的方法,并給出了實例演示。最后,該章節還介紹了如何進行實驗并給出了實驗步驟和注意事項。
6、電機性能測試及計算方法
章節介紹了如何使用TYTO ROBOTICS的Brushless電機進行實驗,并提供了詳細的步驟和注意事項。首先需要確定電機在空載時的Kv值,然后通過安裝不同大小的螺旋槳來測量不同速度下的Kt值。在實驗過程中需要注意安全問題,如佩戴護目鏡、保持距離旋轉部件等。最后需要繪制出扭矩與電流之間的關系圖,并計算出斜率作為Kt值的近似值。這些數據對于完整地描述電機性能非常重要。
7、機器人電機理論與校準方法解析
章節主要介紹了如何正確地校準和計算電機的扭矩和推力,并提供了一個實例來幫助讀者更好地理解這些概念。在進行測量之前需要先校準負載細胞,確保測量結果準確無誤。同時需要注意,在計算Kt時應該使用正數表示扭矩值,如果出現負數則需要將推力符號取反。此外,還提供了電機的規格參數以及適用的電池類型等信息。最后,通過回答一個問題來引導讀者思考可能影響實際測量結果的因素。
8、動力系統教學課程操作軟件
系統配備的實驗室設備為學生們提供了一個實踐操作的機會-學生的任務目標是通過選擇合適的電機和螺旋槳來最大化延長小型無人機的設計飛行時間,最大化提升無人機的動力系統效率。
?


)






浮游菌檢測標準操作規程及GB/T 16292-2010測試方法解讀)





:Qt應用界面設計原則)



】運行配置找不到導入的自定義 makefile 項目)