目錄
1.課題概述
2.系統仿真結果
3.核心程序與模型
4.系統原理簡介
5.完整工程文件
1.課題概述
? ? ? ?基于SVPWM的飛輪控制系統的simulink建模與仿真。SVPWM的核心思想是將逆變器輸出的三相電壓矢量在兩相靜止坐標系(αβ坐標系)中表示,通過控制這些電壓矢量的合成效果,精確地追蹤期望的圓形電壓空間矢量軌跡,以實現對交流電機的高效控制。SVPWM相比傳統的脈寬調制(PWM),能更充分利用直流母線電壓,提高輸出電壓的諧波質量,進而提高電機的轉矩密度和效率。
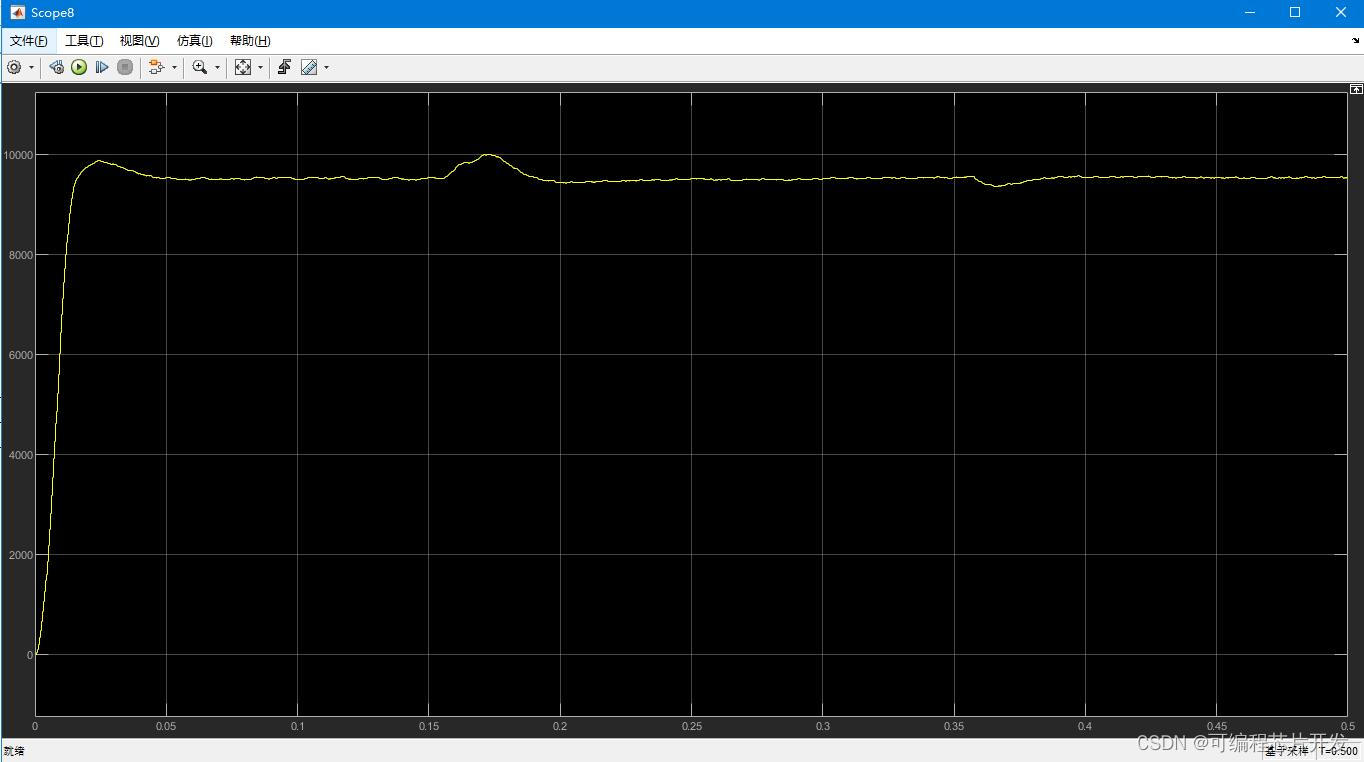
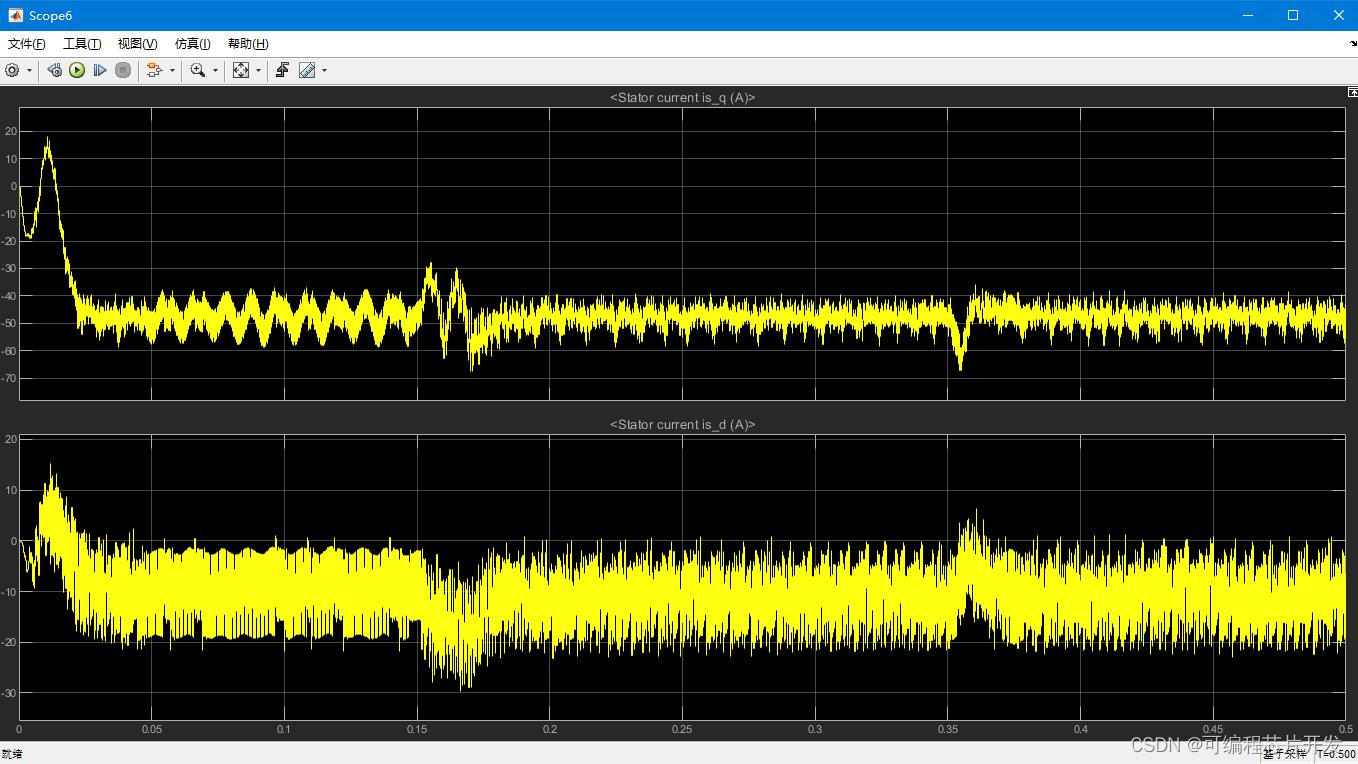
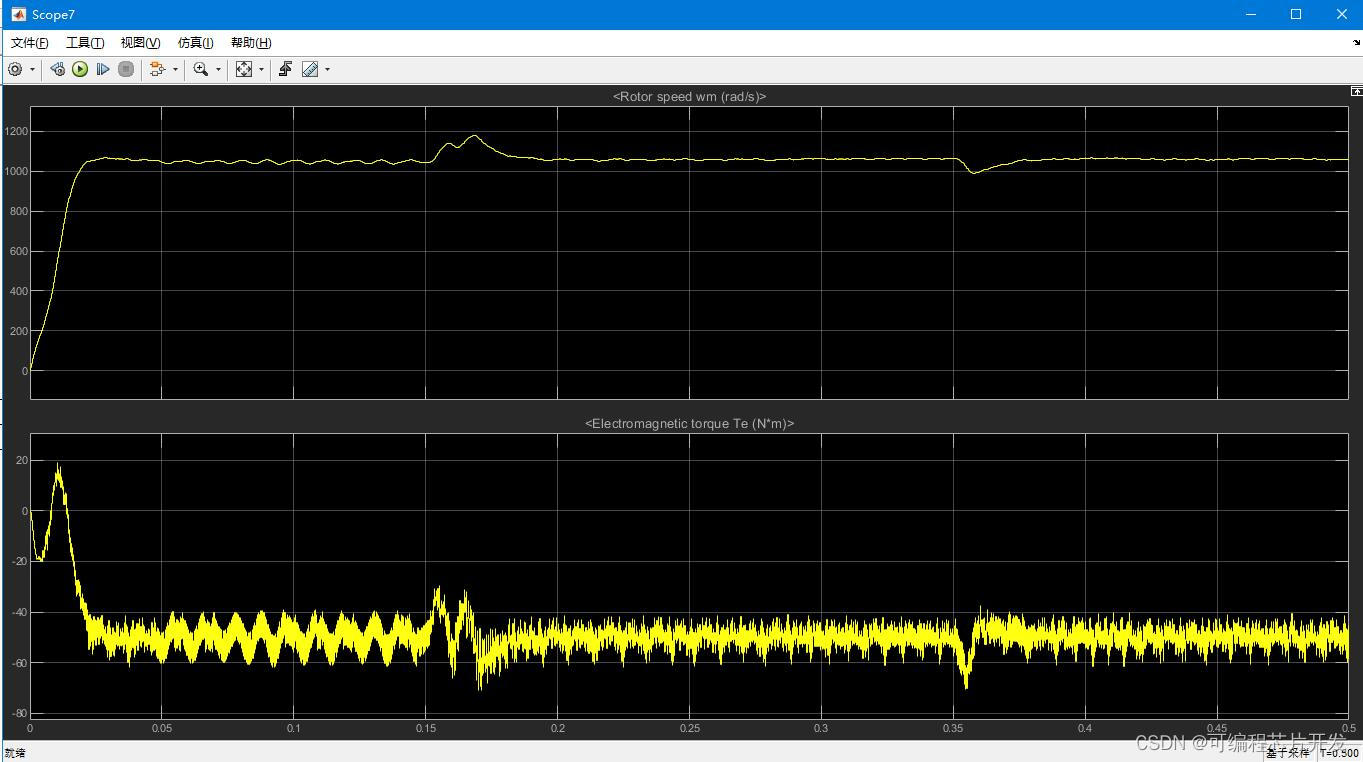
2.系統仿真結果


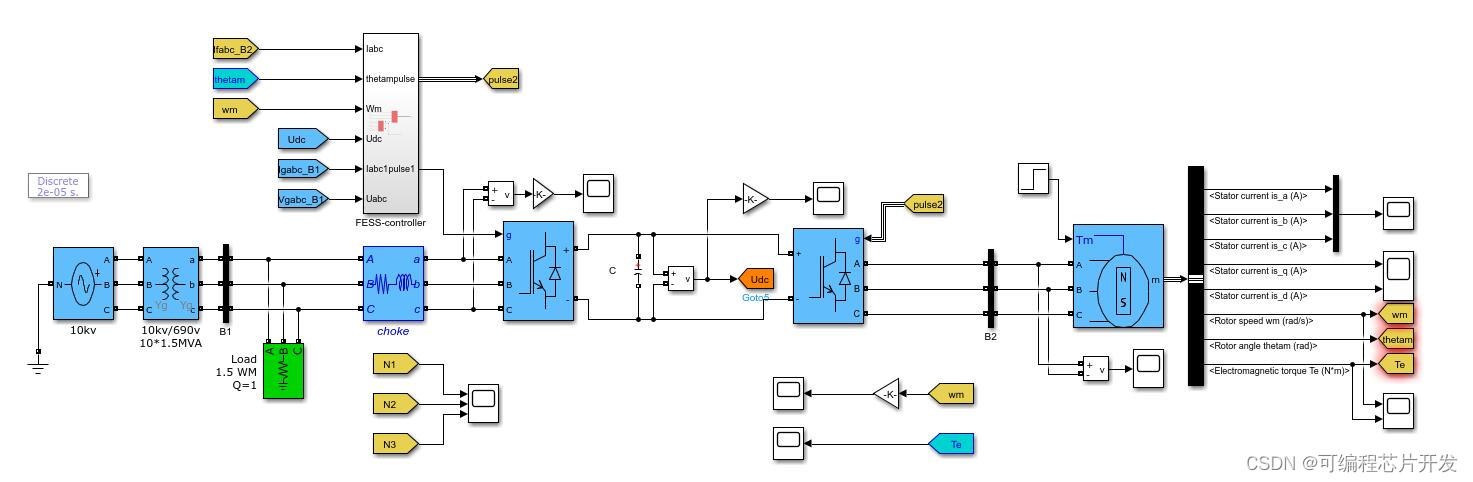
3.核心程序與模型
版本:MATLAB2022a
0058
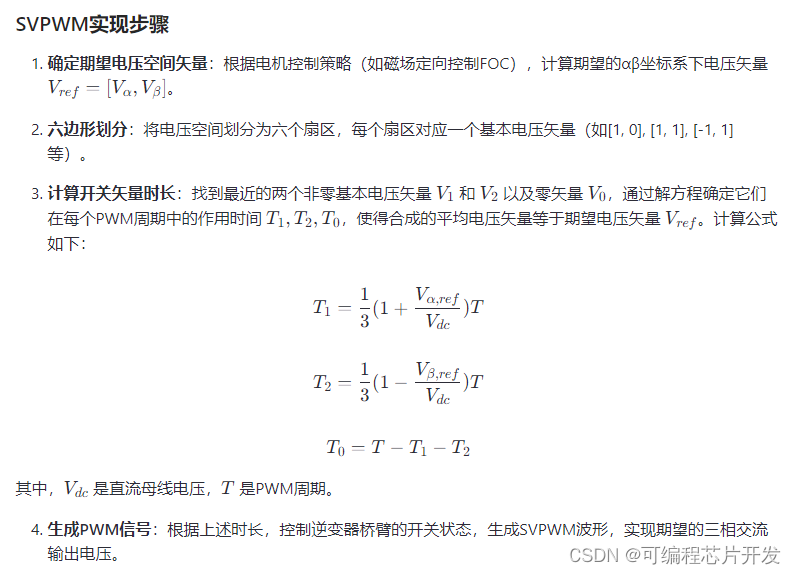
4.系統原理簡介
? ? ? ?SVPWM的核心思想是將逆變器輸出的三相電壓矢量在兩相靜止坐標系(αβ坐標系)中表示,通過控制這些電壓矢量的合成效果,精確地追蹤期望的圓形電壓空間矢量軌跡,以實現對交流電機的高效控制。SVPWM相比傳統的脈寬調制(PWM),能更充分利用直流母線電壓,提高輸出電壓的諧波質量,進而提高電機的轉矩密度和效率。

? ? ? ? SVPWM在飛輪控制系統中的應用,不僅提高了能量轉換效率,減少了諧波含量,而且使得電機運行更加平穩,控制精度更高。這對于維持飛輪的高速穩定旋轉、快速響應負載變化至關重要。此外,SVPWM的靈活性也允許系統根據儲能需求動態調整,實現最優的能量管理和調度,是提高飛輪儲能系統整體性能的關鍵技術之一。
5.完整工程文件
V




)



等級考試試卷(三級))


)



MySQL進階操作)



)