目錄
一、什么是圖像金字塔?
二、圖像金字塔的核心作用
三、圖像金字塔的核心操作:上下采樣
3.1 向下采樣( pyrDown ):從高分辨率到低分辨率
1)原理與步驟
2)關鍵注意事項
3)OpenCV 實戰代碼
4)運行結果分析
3.2 向上采樣( pyrUp ):從低分辨率到高分辨率
1)原理與步驟
2)關鍵注意事項
3)OpenCV 實戰代碼(銜接上采樣代碼)
4)運行結果分析
4.1 拉普拉斯金字塔的定義
4.2 拉普拉斯金字塔的核心作用
4.3 OpenCV 實戰代碼(銜接前文代碼)
4.4 運行結果分析
五、總結與應用拓展
5.1 核心知識點回顧
5.2 實際應用場景
5.3 常見問題與解決方案
在計算機視覺領域,圖像金字塔是處理多尺度圖像問題的核心技術之一。無論是目標檢測、圖像融合還是圖像重建,都離不開圖像金字塔的支持。本文將從基礎概念出發,結合 OpenCV 實戰代碼,詳細講解圖像金字塔的原理、上下采樣操作以及拉普拉斯金字塔的構建與應用,幫助大家徹底掌握這一關鍵技術。
一、什么是圖像金字塔?
圖像金字塔并非傳統意義上的 “金字塔” 結構,而是由同一圖像的多個不同分辨率子圖構成的集合。其核心特征是:
- 底部為原始高分辨率圖像,包含最豐富的細節信息;
- 向上每一層圖像的分辨率都逐步降低(通常寬高各縮小為上一層的 1/2);
- 頂部為低分辨率圖像,僅保留圖像的整體輪廓信息。
可以形象地理解為:將原始圖像不斷 “縮小” 并堆疊,形成類似金字塔的形態,因此得名 “圖像金字塔”。
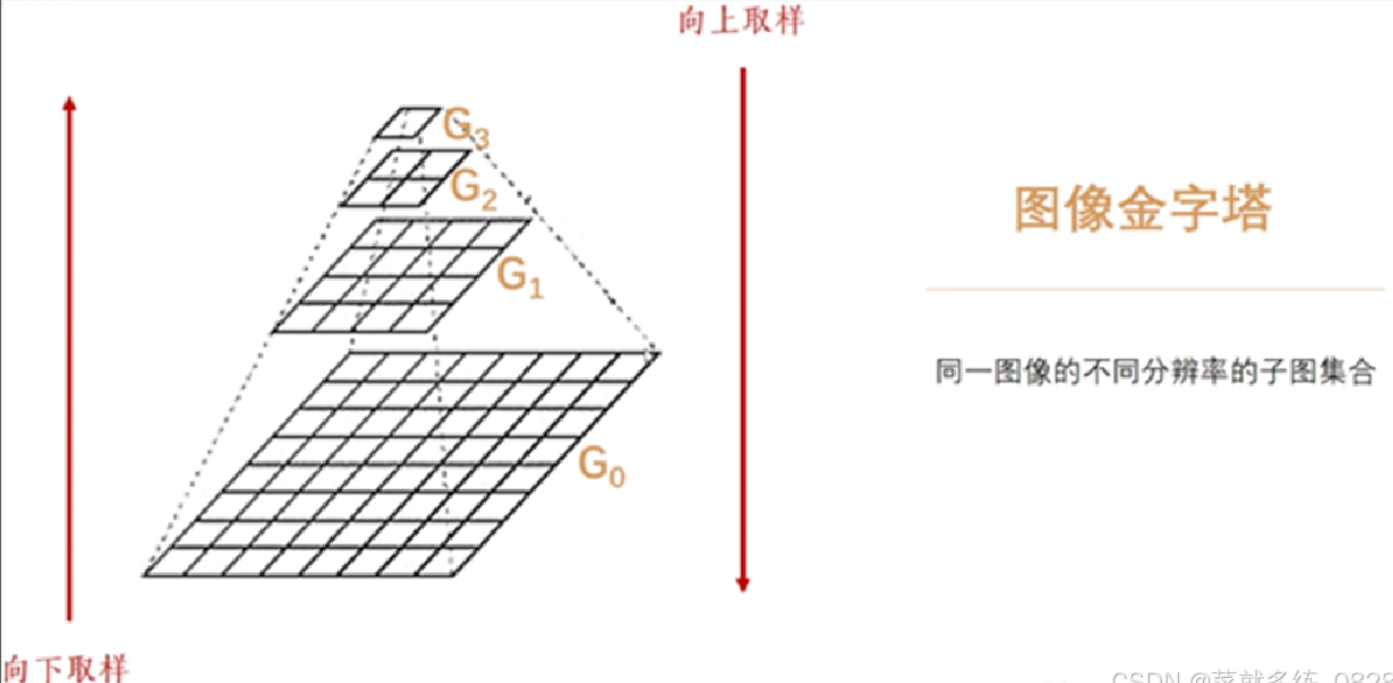
? ? ? ? ? ? ? ? ? ? ? ? ?( 示意圖:從下到上分辨率逐步降低,細節信息逐漸減少)
二、圖像金字塔的核心作用
圖像金字塔的價值在于提供多尺度的圖像信息,解決單分辨率圖像難以應對的復雜場景。其主要應用場景包括:
-
多尺度目標檢測
現實場景中目標大小不一(如遠處的人很小,近處的人很大),通過在不同分辨率的金字塔層中檢測目標,可提高檢測的準確率和魯棒性(例如 OpenCV 的 Haar 級聯檢測就依賴金字塔)。 -
圖像融合與拼接
在全景圖拼接或多曝光圖像融合時,金字塔能提供多尺度細節,避免直接拼接產生的 “拼接縫”,讓融合結果更自然。 -
圖像增強與去噪
不同尺度的金字塔層包含不同頻率的信息(底層高頻細節、頂層低頻輪廓),可針對性處理:在頂層去噪(保留輪廓),在底層增強細節。 -
圖像壓縮與編碼
金字塔頂層的低分辨率圖像數據量小,可作為壓縮的基礎;結合細節信息(如拉普拉斯金字塔),能在高壓縮比下保留關鍵信息。
三、圖像金字塔的核心操作:上下采樣
圖像金字塔的構建依賴兩種基本操作:向下采樣(構建高斯金字塔)和向上采樣(恢復分辨率)。這兩種操作是理解所有金字塔應用的基礎。
3.1 向下采樣( pyrDown ):從高分辨率到低分辨率
1)原理與步驟
向下采樣是構建高斯金字塔的核心操作,目標是降低圖像分辨率,每向上一層,圖像寬高各縮小為原來的 1/2(面積縮小為 1/4)。具體步驟:
- 高斯濾波:用 5×5 的高斯核對原始圖像進行濾波,目的是去除高頻噪聲(避免下采樣時產生 “混疊” 失真);
- 刪除偶數行列:直接刪除濾波后圖像的所有偶數行和偶數列,保留奇數行和奇數列,實現尺寸縮小。

2)關鍵注意事項
- 向下采樣會丟失圖像細節(因為刪除了 50% 的像素),且丟失的信息無法通過后續操作完全恢復;
- 輸入圖像的寬高必須為偶數!若為奇數,下采樣時會因無法整除導致尺寸錯誤(OpenCV 雖不會報錯,但會自動截斷,影響結果)。
3)OpenCV 實戰代碼
import cv2
import numpy as np# 1. 讀取圖像(以灰度圖為例,彩色圖處理邏輯一致)
img = cv2.imread("face.jpg", cv2.IMREAD_GRAYSCALE)
if img is None:print("圖像讀取失敗,請檢查文件路徑!")exit()# 2. 展示原始圖像
cv2.imshow("原始圖像 (640x480)", img)
print(f"原始圖像尺寸: {img.shape}") # 輸出:(480, 640)(高×寬)
cv2.waitKey(0)# 3. 第一次向下采樣(寬高變為 320x240)
img_down1 = cv2.pyrDown(img)
cv2.imshow("第一次下采樣 (320x240)", img_down1)
print(f"第一次下采樣尺寸: {img_down1.shape}") # 輸出:(240, 320)
cv2.waitKey(0)# 4. 第二次向下采樣(寬高變為 160x120)
img_down2 = cv2.pyrDown(img_down1)
cv2.imshow("第二次下采樣 (160x120)", img_down2)
print(f"第二次下采樣尺寸: {img_down2.shape}") # 輸出:(120, 160)
cv2.waitKey(0)# 關閉所有窗口
cv2.destroyAllWindows()
4)運行結果分析
- 原始圖像(640×480)→ 第一次下采樣(320×240):細節略有減少,但輪廓清晰;
- 第二次下采樣(160×120):細節進一步丟失,圖像更模糊,但整體輪廓仍可識別;
- 尺寸變化嚴格遵循 “寬高各縮小 1/2” 的規律。
3.2 向上采樣( pyrUp ):從低分辨率到高分辨率
1)原理與步驟
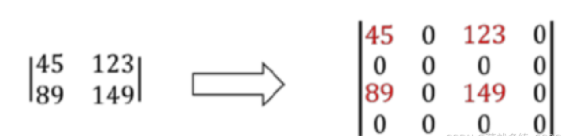
向上采樣是向下采樣的逆操作,目標是恢復圖像分辨率,每向上一層,圖像寬高各擴大為原來的 2 倍(面積擴大為 4 倍)。具體步驟:
- 插值補點:在原始圖像的每個像素之間插入新的像素(通常用雙線性插值),使寬高變為原來的 2 倍(新像素值由周圍像素計算得出);
- 高斯濾波:用 5×5 的高斯核對插值后的圖像進行濾波,平滑圖像(因為插值會引入 “塊狀” 失真)。
? ? ? ? ?
2)關鍵注意事項
- 向上采樣雖然擴大了圖像尺寸,但無法恢復向下采樣時丟失的細節(插值的新像素是 “估算” 的,不是原始像素);
- 向下采樣 + 向上采樣 ≠ 原始圖像(會導致圖像模糊)。
3)OpenCV 實戰代碼(銜接上采樣代碼)
# 1. 對原始圖像進行向上采樣(寬高變為 1280x960)
img_up1 = cv2.pyrUp(img)
cv2.imshow("原始圖像上采樣 (1280x960)", img_up1)
print(f"原始圖像上采樣尺寸: {img_up1.shape}") # 輸出:(960, 1280)
cv2.waitKey(0)# 2. 對下采樣后的圖像進行向上采樣(驗證“不可逆性”)
# 對 img_down1(320x240)上采樣 → 640x480(與原始圖像尺寸相同)
img_down1_up = cv2.pyrUp(img_down1)
cv2.imshow("img_down1 上采樣 (640x480)", img_down1_up)
print(f"img_down1 上采樣尺寸: {img_down1_up.shape}") # 輸出:(480, 640)# 對 img_down2(160x120)上采樣 → 320x240
img_down2_up = cv2.pyrUp(img_down2)
cv2.imshow("img_down2 上采樣 (320x240)", img_down2_up)
print(f"img_down2 上采樣尺寸: {img_down2_up.shape}") # 輸出:(240, 320)
cv2.waitKey(0)# 3. 對比原始圖像與“下采樣+上采樣”圖像(直觀感受模糊)
cv2.imshow("原始圖像", img)
cv2.imshow("img_down1 → 上采樣", img_down1_up)
cv2.waitKey(0)cv2.destroyAllWindows()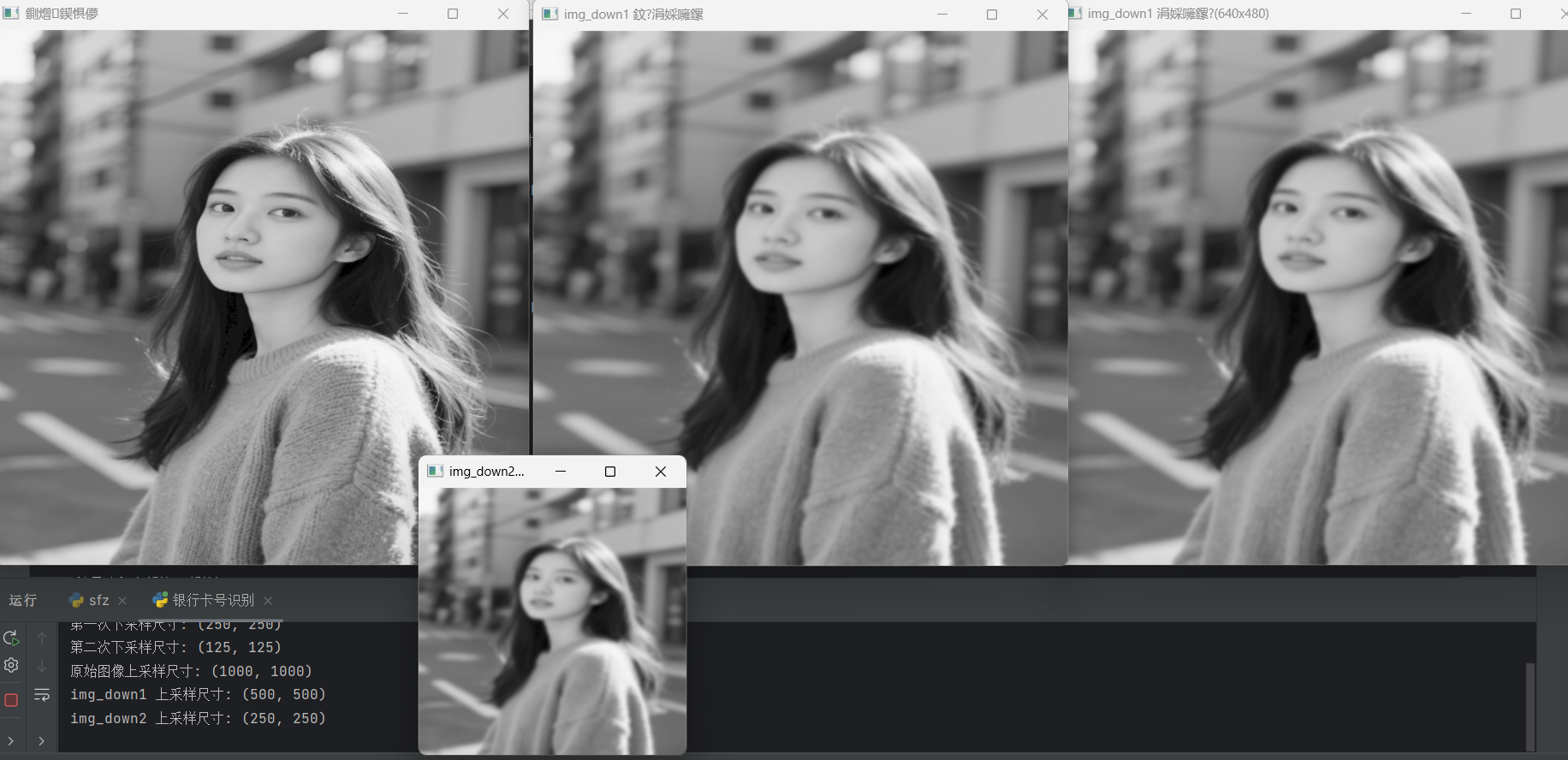
4)運行結果分析
- 原始圖像上采樣(1280×960):尺寸擴大,但細節未增加(因為是插值生成);
img_down1 上采樣(640×480):尺寸與原始圖像相同,但明顯更模糊(丟失的細節無法恢復);- 下采樣次數越多,再上采樣后的圖像越模糊(丟失的細節更多)。
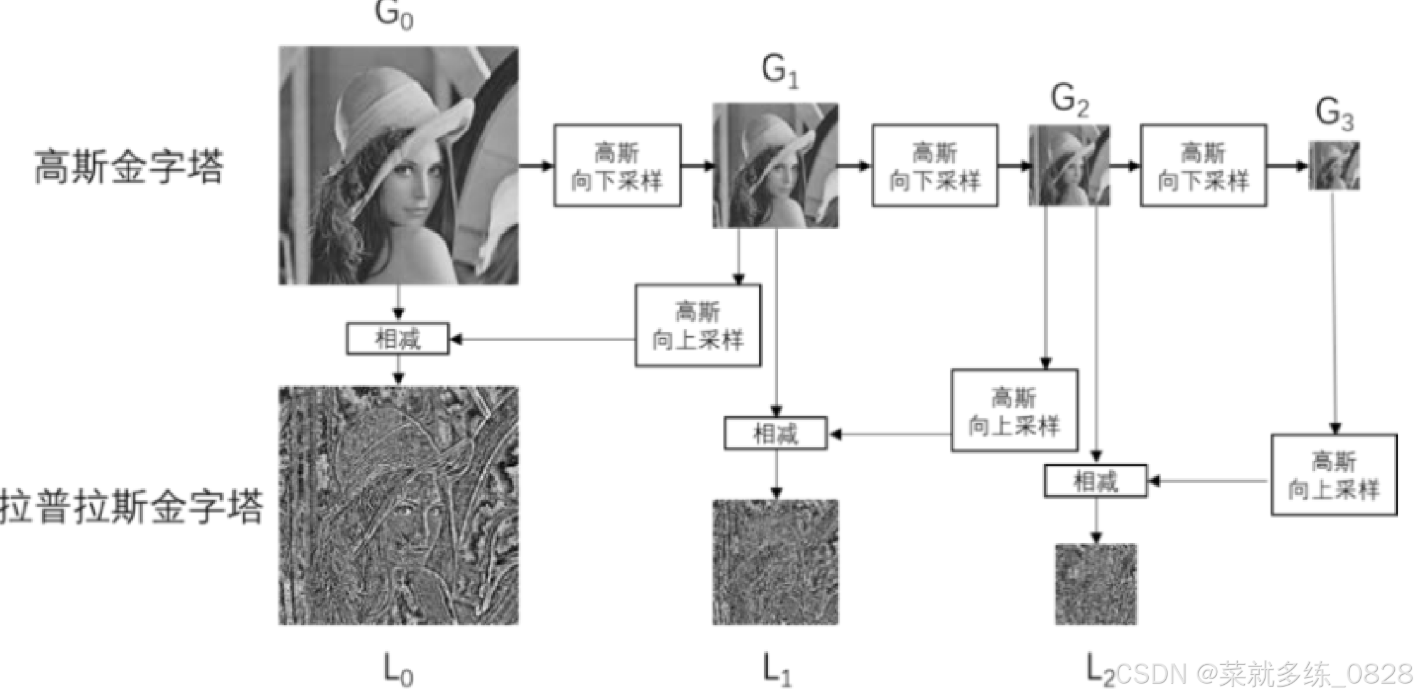
4.1 拉普拉斯金字塔的定義
拉普拉斯金字塔(Laplacian Pyramid)的每一層?Li,定義為高斯金字塔第 i 層?Gi?與 “第 i+1 層上采樣后圖像” 的差值,公式如下:
Li = Gi - pyrUp(pyrDown(Gi))
Gi:高斯金字塔第 i 層(高分辨率圖像);pyrDown(Gi):對?Gi?下采樣得到的低分辨率圖像(Gi+1);pyrUp(pyrDown(Gi)):對?Gi+1?上采樣得到的圖像(尺寸與?Gi?相同,但模糊);Li:拉普拉斯金字塔第 i 層,記錄了?Gi?比?Gi+1?多出來的細節(高頻信息)。
4.2 拉普拉斯金字塔的核心作用
- 圖像重建:通過 “低分辨率圖像 + 拉普拉斯細節”,可恢復更高分辨率的圖像;
- 細節提取:拉普拉斯層包含圖像的邊緣、紋理等高頻細節,可用于圖像增強、修復。
4.3 OpenCV 實戰代碼(銜接前文代碼)
# 1. 構建拉普拉斯金字塔(基于之前的高斯金字塔圖像)
# L0 = 原始圖像 - (原始圖像下采樣后上采樣的圖像)
L0 = img - img_down1_up # 記錄原始圖像比 img_down1 多的細節
# L1 = img_down1 - (img_down1 下采樣后上采樣的圖像)
L1 = img_down1 - img_down2_up # 記錄 img_down1 比 img_down2 多的細節# 2. 展示拉普拉斯層(細節信息)
# 拉普拉斯層像素值可能為負,需歸一化到0-255才能正常顯示
L0_norm = cv2.normalize(L0, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U)
L1_norm = cv2.normalize(L1, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U)cv2.imshow("拉普拉斯層 L0(原始圖像細節)", L0_norm)
cv2.imshow("拉普拉斯層 L1(img_down1 細節)", L1_norm)
cv2.waitKey(0)# 3. 利用拉普拉斯層重建圖像(驗證細節的作用)
# 重建公式:Gi = pyrUp(Gi+1) + Li
reconstructed_img = img_down1_up + L0 # 用 img_down1_up + L0 重建原始圖像# 歸一化重建圖像(避免像素值溢出)
reconstructed_img = cv2.normalize(reconstructed_img, None, 0, 255, cv2.NORM_MINMAX, dtype=cv2.CV_8U)# 對比原始圖像與重建圖像
cv2.imshow("原始圖像", img)
cv2.imshow("拉普拉斯重建圖像", reconstructed_img)
cv2.waitKey(0)cv2.destroyAllWindows()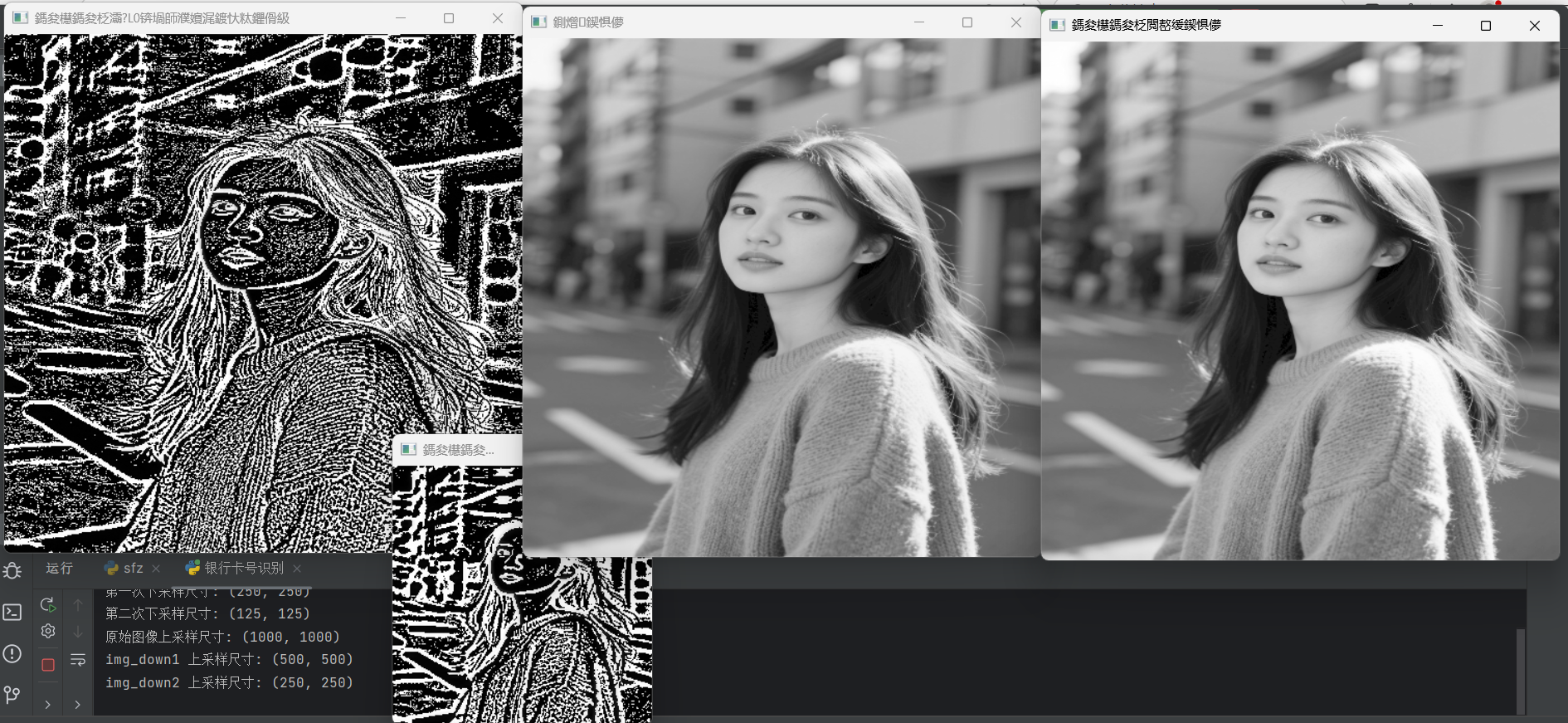
4.4 運行結果分析
-
拉普拉斯層顯示:
L0_norm:主要顯示原始圖像的邊緣、紋理等細節(如人臉的輪廓、眼睛、嘴巴邊緣);L1_norm:顯示?img_down1?的細節(相對模糊,因為?img_down1?本身分辨率較低)。
-
圖像重建效果:
- 重建圖像與原始圖像幾乎一致(細微差異來自數值歸一化);
- 若沒有?
L0?細節,img_down1_up?是模糊的;加上?L0?后,細節被 “補回”,圖像清晰度大幅提升。
五、總結與應用拓展
5.1 核心知識點回顧

5.2 實際應用場景
- 多尺度目標檢測:在高斯金字塔的不同層檢測不同大小的目標(小目標在底層,大目標在頂層);
- 圖像融合:用拉普拉斯金字塔融合不同圖像的細節(如將清晰的前景與自然的背景融合);
- 圖像壓縮:用高斯金字塔頂層的低分辨率圖像存儲基礎信息,拉普拉斯層存儲細節,減少數據量;
- 圖像修復:用拉普拉斯層的細節信息修復圖像中的瑕疵(如去除水印、修復劃痕)。
5.3 常見問題與解決方案
- 下采樣時尺寸報錯:確保輸入圖像寬高為偶數,可通過?
cv2.resize()?預處理調整尺寸; - 拉普拉斯層顯示異常:像素值可能為負,需用?
cv2.normalize()?歸一化到 0-255; - 重建圖像模糊:若拉普拉斯層細節不足(如下采樣次數過多),需減少下采樣層級或優化插值方式。
通過本文的講解,相信大家已經掌握了圖像金字塔的核心原理與實現方法。建議結合實際圖像反復調試代碼,感受不同參數(如高斯核大小、閾值)對結果的影響,為后續更復雜的計算機視覺項目打下基礎!






![[rStar] 搜索代理(MCTS/束搜索)](http://pic.xiahunao.cn/[rStar] 搜索代理(MCTS/束搜索))



)





 D題題解記錄)


