截止周四晚上11點已更新五個問題完整建模和問題一二的代碼
截止周五早上完整版已更新 可以看主頁最新博文獲取
完整內容請看文末最后的推廣群
2.1問題1的分析
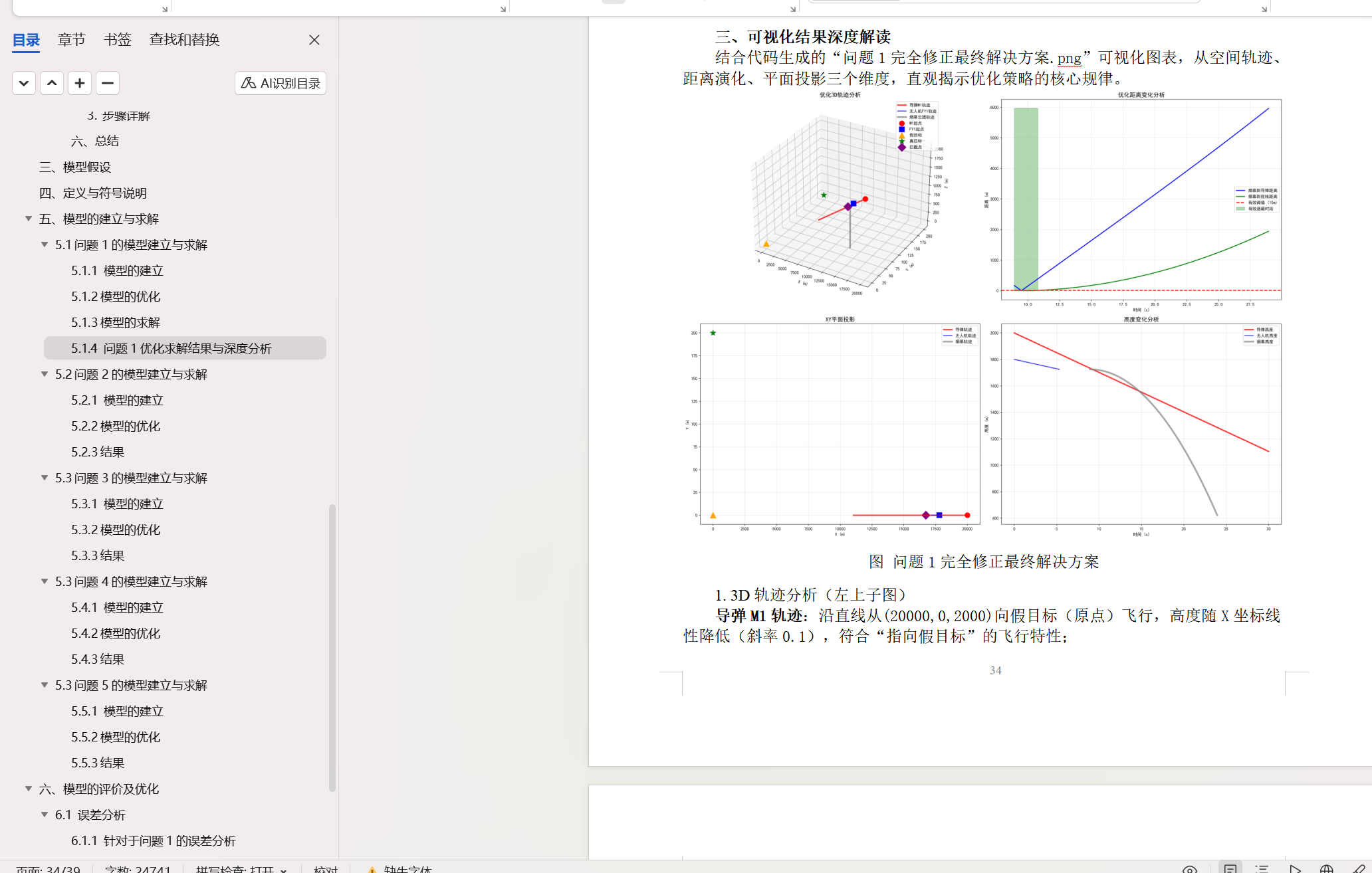
問題1是典型的確定性時空幾何與運動學計算問題,核心在于通過建立坐標系下的參數方程,量化煙幕云團、導彈M1及真目標的時空位置關系,最終求解有效遮蔽的時間區間長度。該問題無需優化,僅需嚴格依據給定參數進行“事件鏈-位置計算-遮蔽判定”的閉環推導,所依賴的核心模型為運動學參數方程與空間幾何相交判定模型。
首先,構建統一的時間與空間基準模型。以雷達發現導彈時刻為t=0,基于笛卡爾坐標系(假目標為原點,z軸垂直于水平面),建立各主體的位置參數方程:
1.無人機FY1的位置方程:已知其沿x軸負方向(朝向假目標)以120 m/s勻速飛行,初始坐標(17800, 0, 1800),則t時刻位置為。
2.導彈M1的位置方程:以300 m/s直指原點,初始坐標(20000, 0, 2000),則t時刻位置為。
3.煙幕云團的位置方程:投放時刻s,投放點為;起爆延遲3.6 s,起爆時刻s,起爆后云團以3 m/s勻速下沉,故t≥5.1 s時云團中心坐標為,云團為半徑10 m的球體。
其次,明確有效遮蔽的判定模型。煙幕對M1的有效遮蔽需同時滿足時間約束與空間約束:
時間約束:起爆后20 s內,即。
空間約束:M1與真目標之間的視線線段需與煙幕云團球體相交。真目標為底面圓心(0,200,0)、半徑7 m、高10 m的圓柱,可簡化為點集。任取中一點,視線線段與球體有交點,則判定為有效遮蔽。
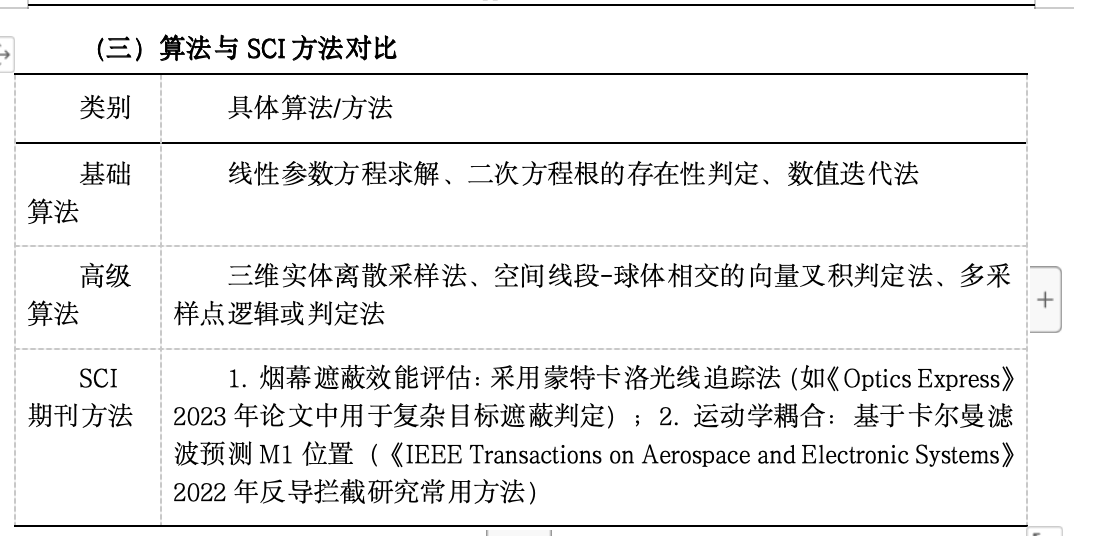
最后,通過線段與球體相交的解析算法求解約束條件。將視線線段參數化為(),代入球體方程得到關于s的二次方程,若方程在s∈[0,1]內有實根,則判定相交。遍歷真目標特征點(如圓心、邊緣點),求解滿足相交條件的t區間,區間長度即為有效遮蔽時長。該過程需通過MATLAB或Python實現數值求解,核心是將幾何判定轉化為代數方程的根的存在性問題。
2.2問題2的分析
問題2是單變量約束優化問題,目標函數為有效遮蔽時長,優化變量為FY1的飛行參數(方向θ、速度v)、投放時刻t0、起爆延遲Δt,核心是通過建立“變量-目標函數”的映射關系,結合約束條件尋找最優解,所依賴的模型為多變量優化模型與煙幕遮蔽效能評估模型。
首先,定義優化變量與約束集。設飛行方向θ為速度向量與x軸正方向的夾角,則FY1的速度分量為,t時刻位置為;投放時刻t0(t0≥0),投放點為;起爆延遲Δt(Δt≥0),起爆時刻,云團中心坐標為(t≥t1)。約束條件包括:,,(為M1到達真目標的時間,計算得約66.67 s)。
其次,構建目標函數模型。有效遮蔽時長是t的集合的測度。為簡化計算,采用真目標中心近似法,以真目標底面圓心代表真目標,此時視線線段為,目標函數可通過求解線段與球體相交的t區間長度直接量化。
最后,設計優化算法求解。由于變量維度較高(4維),采用分層優化策略結合粒子群優化(PSO)算法:
2.第一層:固定θ,將問題降為3維(v,t0,Δt)優化,通過PSO算法搜索該θ下的最優解;
3.第二層:遍歷θ∈[0,2π),尋找全局最優θ及對應的v,t0*,Δt*。
優化過程中需通過數值迭代驗證每個粒子(變量組合)對應的遮蔽時長,核心是將優化算法與幾何相交判定模型耦合,確保目標函數計算的準確性。同時,為避免局部最優,需設置合理的PSO參數(種群規模、迭代次數、慣性權重),并通過多次隨機初始化種群提高解的全局最優性。
2.3問題3的分析
問題3是多彈時序協同優化問題,需在單無人機約束下(投放間隔≥1 s,飛行參數固定),通過優化3枚干擾彈的投放與起爆時序,實現遮蔽時長的疊加最大化,核心模型為多彈時序協同模型與整數規劃約束下的優化模型。
首先,建立多彈投放的時序約束模型。設3枚彈的投放時刻為t01、t02、t03,滿足,;起爆延遲為Δt1、Δt2、Δt3,起爆時刻為t11=t01+Δt1、t12=t02+Δt2、t13=t03+Δt3;各彈有效遮蔽時段為(i=1,2,3)。總有效遮蔽時長為3個區間的并集測度,即,目標是最大化。
其次,構建飛行參數與投放點的關聯模型。FY1飛行參數(θ,v)固定后,3枚彈的投放點為,起爆點云團中心在t時刻的坐標為。由于飛行參數固定,投放點的空間分布由t01、t02、t03唯一確定,因此優化變量可歸為(θ,v,t01,t02,t03,Δt1,Δt2,Δt3)。
最后,設計混合優化算法。考慮到變量維度高且含時序約束,采用遺傳算法(GA)+局部搜索的混合策略:
3.編碼:將θ、v、t01、t02、t03、Δt1、Δt2、Δt3編碼為染色體,其中θ采用角度編碼,v、t0i、Δti采用實數編碼;
4.適應度函數:計算每個染色體對應的,作為適應度值;
5.選擇、交叉、變異:采用輪盤賭選擇、算術交叉、高斯變異,確保種群多樣性;
6.局部搜索:對適應度前20%的個體,微調t0i和Δti,優化區間銜接效果,避免遮蔽空白。
同時,需嵌入約束處理機制:對違反投放間隔或時間上限(t13+20≤66.67)的個體,設置適應度懲罰值,確保解的可行性。通過該算法可求解出最優飛行參數與多彈時序,實現遮蔽時段的連續或部分重疊,最大化總時長。
2.4問題4的分析
問題4是多無人機協同優化問題,需為FY1、FY2、FY3分配遮蔽任務,優化各機飛行與投放參數,實現多彈遮蔽時段的全局最優銜接,核心模型為任務分配模型與多智能體協同優化模型。
首先,建立任務分配的聚類模型。基于M1的飛行時間軸,將遮蔽任務劃分為3個時段:早期(t∈[tA,tB])、中期(t∈[tB,tC])、后期(t∈[tC,tD])。采用K-means聚類算法,以M1在不同時刻的位置為樣本,將其劃分為3類,對應3個任務時段。根據無人機初始位置與任務時段的距離匹配度(距離=無人機初始位置到任務時段M1平均位置的歐氏距離/最大速度),分配FY1(初始距M1最近)執行早期任務,FY2執行中期任務,FY3(初始距真目標最近)執行后期任務。
其次,構建多無人機參數優化模型。設第k架無人機(k=1,2,3對應FY1,FY2,FY3)的優化變量為(θk,vk,t0k,Δtk),約束條件為,,(t1k=t0k+Δtk)。目標函數為總遮蔽時長,需滿足時段銜接約束(δ≤1 s,確保無縫銜接)。
最后,采用分布式粒子群優化(DPSO)算法求解。將3架無人機視為3個粒子群,每個粒子群優化自身變量,通過信息交互(共享各機的t1k)協調時段銜接:
4.每個子群優化自身變量,計算局部適應度(自身遮蔽時長);
5.全局通信層匯總各子群的t1k,計算全局適應度(總遮蔽時長);
6.各子群根據全局適應度調整自身搜索方向,優先優化t0k和Δtk以滿足銜接約束。
該算法通過分布式計算降低復雜度,同時通過信息共享實現全局協同,避免各機獨立優化導致的遮蔽重疊浪費或空白。
2.5問題5的分析
問題5是多目標、多資源的復雜優化問題,需統籌5架無人機(每架至多3枚彈)對M1、M2、M3的干擾任務,核心模型為資源分配整數規劃模型與多目標優化模型。
首先,建立資源分配的整數規劃模型。設決策變量為(1≤k≤5,1≤j≤3),表示第k架無人機分配給第j枚導彈的干擾彈數量,滿足(每機至多3枚),(每枚導彈至少1枚彈干擾),。目標函數為最大化3枚導彈的總遮蔽時長(為第j枚導彈的遮蔽時長)。采用分支定界法求解該整數規劃,確定各機對各導彈的投彈數量分配方案。
其次,構建多導彈遮蔽的效能評估模型。對每枚導彈Mj,其位置方程為,其中(xMj0,yMj0,zMj0)為初始坐標,αj為Mj飛行方向與x軸的夾角(由初始位置指向原點計算得出)。每枚干擾彈對Mj的遮蔽判定同問題1,需獨立計算。
最后,采用多目標遺傳算法(MOGA) 求解全局優化問題。由于需同時優化5架無人機的飛行參數(θk,vk)、各枚彈的投放時刻(t0kj)與起爆延遲(Δtkj),變量維度極高,需通過以下策略簡化:
1.分層優化:先通過整數規劃確定,再針對每個(k,j)組合優化其參數;
2.多目標處理:將T1、T2、T3作為三個目標,采用非支配排序遺傳算法(NSGA-II)搜索帕累托最優解,最終根據實際需求(如優先保護真目標,可側重M1的遮蔽時長)選擇折中解。
同時,需考慮多導彈視線的干擾耦合:若一枚干擾彈同時處于多枚導彈的視線路徑上,可同時計入多枚導彈的遮蔽時長,通過該“協同增益”提升整體效能。算法實現中需通過并行計算加速多彈遮蔽判定,確保優化效率。

)





![[Linux] Linux標準塊設備驅動詳解:從原理到實現](http://pic.xiahunao.cn/[Linux] Linux標準塊設備驅動詳解:從原理到實現)




ES6前端開發核心:國際化與格式化、內存管理與性能)






