4.3 設置電機數據
在調試之前,電機控制器需要電機數據表中的一些值。
■ 極對數:對象 2030h:00h(極對數) 電機極對數應在此處輸入。對于步進電機,極對數使用步距角計算,例如,1.8° = 50 個極對,0.9° = 100 個極對(參見電機數據表中的步距角)。對于 BLDC 電機,極對數直接在電機數據表中指定。
■ 對象 2031h:00h:最大允許電機電流(電機保護),單位為 mA(見電機數據表)
?■ 對象 6075h:00h:電機的額定電流,單位為 mA(見電機數據表),受 2031h 限制
■ 對象 6073h:00h:最大電流(對于步進電機,通常對應于額定電流,雙極)以設定額定電流的十分之一為單位(見電機數據表)。出廠設置:“1000”,相當于 100h 中值的 6075%。受 2031 小時限制。
■ 對象 203Bh:02h 最大電流的最大持續時間 (6073h),單位為 ms(對于初始調試,Nanotec 建議值為 100 ms;該值將在以后根據具體應用進行調整)。
■ 設置電機類型:
□ 步進電機:
?? 對象 3202h:00h(電機驅動子模式選擇):定義電機類型步進電機,在電機靜止時激活電流降低:0000008h。另請參閱章節 Commissioning open-loop.
.□ BLDC 電機:
? 對象 3202h:00h(電機驅動子模式選擇):定義電機類型 BLDC:00000040h
■ 帶編碼器的電機:Object 2059h:00h (編碼器配置):根據編碼器版本,需要輸入以下值之一(見電機數據表):
□ 電源電壓 5V,差動:00000000h
?□ 電源電壓 5V,單端:00000002h
■ 帶編碼器的電機,不帶索引:您必須在自動設置后設置編碼器參數,參見配置傳感器一章。
■ 帶制動器的電機:Object 3202h:00h (電機驅動子模式選擇):初始調試時,制動控制被激活。根據特定的應用程序,如有必要,可以稍后停用此配置。根據電機類型,需要輸入以下值之一:
□ 步進電機,制動控制(和電流降低)激活:0000000Ch
□ BLDC 電機,制動控制激活:00000044h
![]()
由于正弦換向和正弦電流,電機繞組的電流可以達到比設定電流稍大(最大 √2 倍)的交流電值。
因此,在特別慢的速度或滿載靜止時,其中一個繞組可以更長時間地提供過電流。在確定電機尺寸時要考慮到這一點,如果應用需要,如有必要,請選擇具有更大扭矩儲備的電機。
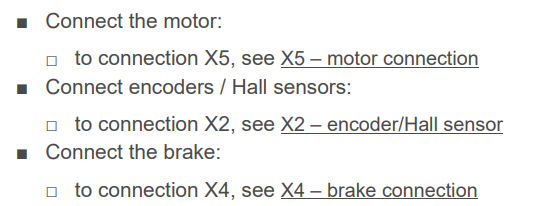
4.4 連接電機
設置電機參數后,請參閱設置電機數據,連接電機,如果適用,連接現有的傳感器(編碼器/霍爾傳感器)。

如果電機連接不正確,會損壞電子設備!
? 觀察 引腳分配 和 電機數據表 一章中的 PIN 分配
如何激活自動制動控制在自動制動控制一章中描述
易格斯拖鏈、電纜、軸承 - 精進技術,降低成本(官網)易格斯(igus)在拖鏈、電纜和塑料軸承領域處于領先水平,產品范圍涵蓋了塑料拖鏈,電纜,軸承,直線導軌,電纜接頭。![]() https://www.igus.cn/zh-CN/linear/e-motors
https://www.igus.cn/zh-CN/linear/e-motors
易格斯拖鏈、電纜、軸承 - 精進技術,降低成本(官網)易格斯(igus)在拖鏈、電纜和塑料軸承領域處于領先水平,產品范圍涵蓋了塑料拖鏈,電纜,軸承,直線導軌,電纜接頭。![]() https://www.igus.cn/zh-CN/linear/axis-linear-modules
https://www.igus.cn/zh-CN/linear/axis-linear-modules
采集系統(二):門診發藥后端)







:步驟與數據組織形式)

)


)

)



:n8n簡介與平臺部署)