一、簡介
該論《Globally Consistent and Tightly Coupled 3D LiDAR Inertial Mapping》是日本先進工業科學技術研究所(AIST)的Koide等人于2022年在IEEE國際機器人與自動化會議(ICRA)上發表的一篇論文。該研究提出了一種基于全局匹配代價最小化和LiDAR-IMU緊耦合的實時三維建圖框架,旨在提高在特征稀缺或動態環境中的定位與建圖精度。
文由 Koide 等人在 2022 年發表,提出了一種全局一致且緊耦合的三維 LiDAR-IMU 建圖方法。其核心目標是提升在特征稀缺或動態環境下的三維定位與建圖精度,并保持實時性。與傳統基于位姿圖優化的方法不同,本文方法直接最小化全局匹配代價,并在前端和后端緊耦合 LiDAR 與 IMU 數據,實現全局一致性和高魯棒性。
二、文章貢獻(創新點)
- 全局匹配代價最小化:不依賴傳統位姿圖優化,直接優化全局匹配代價以保證地圖全局一致性。
- LiDAR-IMU 緊耦合:前端和后端均融合 IMU 數據,增強系統在特征稀缺環境下的魯棒性和精度。
- GPU 加速體素化 GICP 匹配:利用 GPU 提升匹配代價計算速度,實現實時建圖。
- 適應特征稀缺環境:可在缺乏明顯幾何特征的環境中仍保持高精度定位和地圖生成。
三、詳細內容
1. 算法背景
- 傳統方法問題:基于位姿圖優化的 LiDAR-SLAM 在特征豐富環境中表現良好,但在特征稀缺或動態環境中容易漂移。
- LiDAR-IMU 融合:通過將 IMU 數據引入前端與后端優化,提供額外約束,減少漂移,提高精度。
- 全局一致性需求:單純局部優化容易累積誤差,影響整體地圖質量。
2. 需解決的關鍵問題
- 特征稀缺環境下定位漂移:在空曠或重復結構場景中,LiDAR 匹配不穩定。
- 高效融合 LiDAR 與 IMU 數據:前端與后端均需充分利用 IMU 信息,同時保證計算效率。
- 實時性與計算效率:全局優化和匹配代價計算需高效以支持實時運行。
3. 算法流程
-
預處理
- 點云去畸變、濾波、體素化。
-
前端估計
- 關鍵幀選擇 + 固定滯后平滑(Fixed-Lag Smoother)
- GPU 加速的體素化 GICP 匹配代價因子
- IMU 預積分因子約束
-
局部建圖
- 構建局部因子圖
- 優化局部匹配代價 + IMU 約束
-
全局建圖
- 構建全局因子圖
- 最小化全局匹配代價,保證全局一致性
4. 具體實現步驟
圖 1 展示了提出的整體框架。整個系統由一個預處理模塊和三個估計模塊組成:里程計估計、本地建圖和全局建圖。這些模塊都基于緊耦合的 LiDAR-IMU 融合。里程計估計模塊(即前端)負責魯棒地追蹤傳感器的運動,并提供最新狀態的初始估計。隨后,本地建圖模塊會進一步優化這些狀態,并將若干局部幀整合成一個子圖。全局建圖模塊則對這些子圖的位姿進行整體優化,以確保地圖全局一致性。整個流程通過多線程并行運行,提高效率。
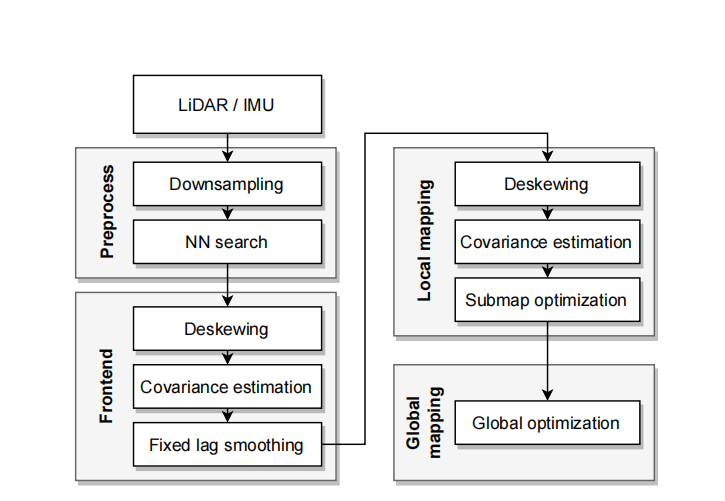
圖1
用 x_tx\_tx_t 來表示需要估計的傳感器狀態:
xt=[Tt,vt,bt]T,x_t = [T_t, v_t, b_t]^T, xt?=[Tt?,vt?,bt?]T,
其中 KaTeX parse error: Undefined control sequence: \[ at position 8: T\_t = \?[?R\_t | t\_t] \i… 表示位姿,v_t∈R3v\_t \in \mathbb{R}^3v_t∈R3 為速度,KaTeX parse error: Undefined control sequence: \[ at position 8: b\_t = \?[?b^a\_t, b^\omeg… 是 IMU 的加速度和角速度偏置。狀態估計依賴 LiDAR 點云 P_tP\_tP_t 以及 IMU 測量(線加速度 a_ta\_ta_t 和角速度 ω_t\omega\_tω_t)。為了簡化處理, 將 LiDAR 點云統一映射到 IMU 坐標系下。
接下來,將介紹兩個核心因子:LiDAR 匹配代價因子和 IMU 預積分因子,這些因子是框架中因子圖的主要組成部分,然后再詳細說明每個模塊的實現。
4.1、 LiDAR 匹配代價因子
匹配代價因子用來約束兩個位姿 T_iT\_iT_i 和 T_jT\_jT_j,目標是讓它們對應的點云 P_iP\_iP_i 和 P_jP\_jP_j 盡可能對齊。采用體素化 GICP(Voxelized GICP, VGICP)作為代價函數,它是 GICP 的一種變體,適合 GPU 加速計算。
VGICP 會將每個點 p_k∈P_ip\_k \in P\_ip_k∈P_i 用高斯分布 (μ_k,C_k)(\mu\_k, C\_k)(μ_k,C_k) 來建模,其中協方差 C_kC\_kC_k 由鄰域點計算得到。點云 P_jP\_jP_j 則被離散為體素,并為每個體素計算均值和協方差。匹配代價定義為:
eM(Pi,Pj,Ti,Tj)=∑pk∈PieD2D(pk,Ti?1Tj),e_M(P_i, P_j, T_i, T_j) = \sum_{p_k \in P_i} e_{D2D}(p_k, T_i^{-1} T_j), eM?(Pi?,Pj?,Ti?,Tj?)=pk?∈Pi?∑?eD2D?(pk?,Ti?1?Tj?),
eD2D(pk,Tij)=dkT(Ck0+TijCkTijT)?1dk,e_{D2D}(p_k, T_{ij}) = d_k^T \big(C_k^0 + T_{ij} C_k T_{ij}^T \big)^{-1} d_k, eD2D?(pk?,Tij?)=dkT?(Ck0?+Tij?Ck?TijT?)?1dk?,
其中 d_k=μ_k0?T_ijμ_kd\_k = \mu\_k^0 - T\_{ij}\mu\_kd_k=μ_k0?T_ijμ_k 是點間殘差,p_k0=(μ_k0,C_k0)p\_k^0 = (\mu\_k^0, C\_k^0)p_k0=(μ_k0,C_k0) 來自 P_jP\_jP_j 的體素地圖。
每次優化迭代都會重新計算并線性化 $e_M$,相比傳統的 SE(3) 相對位姿約束,VGICP 提供了更精確的約束信息。
4.2、 IMU 預積分因子
IMU 預積分因子能夠高效地將 IMU 測量融入因子圖。給定加速度 a_ta\_ta_t 和角速度 ω_t\omega\_tω_t,傳感器狀態隨時間演化:
Rt+Δt=Rtexp?((ωt?bωt?ηωt)Δt),R_{t+\Delta t} = R_t \exp((\omega_t - b_\omega^t - \eta_\omega^t)\Delta t), Rt+Δt?=Rt?exp((ωt??bωt??ηωt?)Δt),
vt+Δt=vt+gΔt+Rt(at?bat?ηat)Δt,v_{t+\Delta t} = v_t + g \Delta t + R_t (a_t - b_a^t - \eta_a^t) \Delta t, vt+Δt?=vt?+gΔt+Rt?(at??bat??ηat?)Δt,
tt+Δt=tt+vtΔt+12gΔt2+12Rt(at?bat?ηat)Δt2.t_{t+\Delta t} = t_t + v_t \Delta t + \frac{1}{2} g \Delta t^2 + \frac{1}{2} R_t (a_t - b_a^t - \eta_a^t) \Delta t^2. tt+Δt?=tt?+vt?Δt+21?gΔt2+21?Rt?(at??bat??ηat?)Δt2.
通過預積分,可以在兩個時間步 iii 和 jjj 之間獲得相對運動約束,從而在缺乏幾何特征或 LiDAR 因子受限的環境中仍能保持穩定估計,并減少四自由度漂移,同時提供重力方向約束。
4.3、 預處理
輸入點云先經過體素濾波下采樣。在去畸變過程中,每個體素不僅對點位置取平均,也對時間戳取平均。如果點的時間與體素時間差過大,會將其重新分配到新體素,以避免掃描首尾點被錯誤融合。
接著,為每個點找到 kkk 個鄰近點,用于協方差估計。假設去畸變過程中點的鄰域關系不會發生大的變化,這些鄰近點可直接用于后續計算。
4.4、 里程計估計
里程計估計模塊通過融合 LiDAR 和 IMU 測量,補償快速傳感器運動并穩健地估計傳感器狀態。首先,根據 IMU 動力學預測,將點云變換到 IMU 坐標系,以去除運動畸變。隨后,通過預先計算的鄰近點協方差,為每個點建立不確定性模型。
在去畸變后的點云基礎上,構建因子圖(如圖 2 所示)。為了保持實時性能,采用固定時滯平滑(fixed-lag smoothing)方法,并對舊幀進行邊緣化。借鑒直接稀疏里程計(Direct Sparse Odometry)的思路,引入關鍵幀機制來實現高效且低漂移的軌跡估計。關鍵幀是一組在空間上分布合理、且與最新幀重疊度較高的幀。在最新幀與每個關鍵幀之間添加匹配代價因子,以減小漂移。若關鍵幀已被固定時滯平滑器邊緣化,則其位姿被視為固定,并通過一元匹配代價因子約束最新幀的位姿。
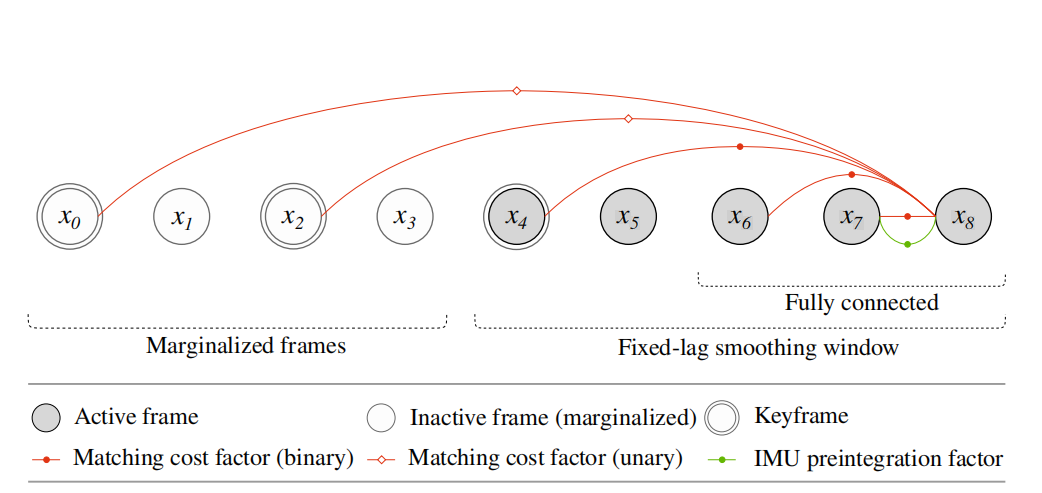
圖2
關鍵幀管理策略如下:
-
定義兩幀 P_iP\_iP_i 和 P_jP\_jP_j 的重疊率為 P_iP\_iP_i 中落在 P_jP\_jP_j 體素內的點占比 。
-
新幀到達時,若其與最新關鍵幀重疊率低于閾值(如 90%),則將其加入關鍵幀列表。
-
為避免冗余關鍵幀:
-
移除與最新關鍵幀重疊率低于閾值(如 5%)的關鍵幀;
-
若關鍵幀總數超過 N_odomN\_{\text{odom}}N_odom(如 20),則移除評分最低的關鍵幀:
s(i)=o(i,Nodom)∑j∈[1,Nodom?1]?{i}(1?o(i,j)),s(i) = o(i, N_{\text{odom}}) \sum_{j \in [1, N_{\text{odom}}-1] \setminus \{i\}} (1 - o(i, j)), s(i)=o(i,Nodom?)j∈[1,Nodom??1]?{i}∑?(1?o(i,j)),
其中 o(i,j)o(i,j)o(i,j) 表示第 iii 幀與第 jjj 幀關鍵幀的重疊率。該評分函數旨在保持關鍵幀在空間上的均勻分布,同時保留最新幀附近的關鍵幀。
-
此外,在最新幀與最近幾幀(如最近三幀)之間建立匹配代價因子,以增強里程計對快速運動的魯棒性。同時,連續幀之間添加 IMU 預積分因子,在特征稀少環境下進一步提升估計穩定性。
4.5、 局部建圖
里程計估計中被邊緣化的幀會被送入局部建圖模塊,作為子圖(submap)的初始狀態。局部建圖將若干幀組合為子圖,從而減少全局優化變量數量。
處理流程如下:
- 使用邊緣化狀態重新去畸變(deskewing)并計算協方差,從而獲得更準確的點云初始估計。
- 評估新幀與子圖中最新幀的重疊率,若低于閾值(如 90%),則將新幀加入子圖因子圖。
- 為子圖內每一幀組合添加匹配代價因子,實現全幀兩兩配準。
- 連續幀間添加 IMU 預積分因子,并為每幀速度與偏置添加邊緣化狀態先驗因子,以增強子圖優化的穩定性。
當子圖幀數達到 N_subN\_{\text{sub}}N_sub(如 15)或首尾幀重疊率低于閾值(如 5%)時,通過 Levenberg-Marquardt 優化器 對因子圖進行優化,并將優化結果合并為單個子圖。
4.6、 全局建圖
全局建圖模塊用于消除累積漂移,實現全局一致的地圖構建。每對子圖間若重疊率超過閾值(如 5%),則創建匹配代價因子,生成稠密的全局因子圖。這樣,子圖不僅與相鄰子圖對齊,還能與重新訪問的子圖對齊,從而實現閉環校正。
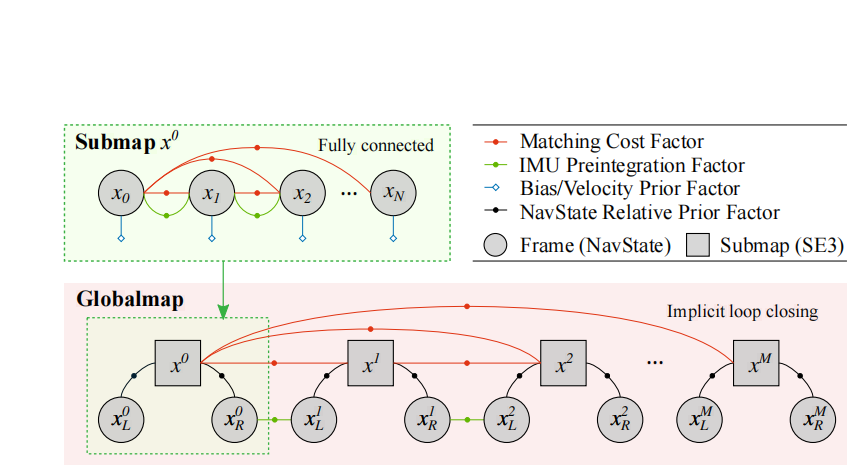
由于子圖創建間隔較大(如 10 秒),僅依賴 IMU 因子無法有效約束子圖間相對位姿,同時會丟失局部建圖的速度與偏差信息。為解決這一問題, 為每個子圖 x_ix\_ix_i 引入兩個“端點”狀態:x_iLx\_i^Lx_iL 和 x_iRx\_i^Rx_iR,分別對應子圖首尾幀相對于子圖原點的狀態。
具體做法:
- 子圖原點 T_iT\_iT_i 定義為中間幀 T_N_sub/2T\_{N\_\text{sub}/2}T_N_sub/2 的位姿。
- 將每幀狀態 x_tx\_tx_t 表示為相對于子圖原點的狀態。
- 在 x_ix\_ix_i 與端點 x_iL,x_iRx\_i^L, x\_i^Rx_iL,x_iR 之間創建相對狀態因子,以滿足公式 11–13。
- 在x_iRx\_i^Rx_iR 與 x_i+1Lx\_{i+1}^Lx_i+1L 之間添加 IMU 因子,以覆蓋較短時間間隔,既約束子圖位姿,又保留局部建圖速度與偏差信息。
每當累積若干新子圖(如每 5 個)時,使用 GTSAM 的 iSAM2 優化器對全局因子圖進行增量優化,持續更新全局一致的地圖。
四、優勢總結
- 全局一致性:通過全局匹配代價最小化保證地圖一致性。
- 高魯棒性:緊耦合 LiDAR-IMU,可在特征稀缺或動態環境中保持精度。
- 實時性:GPU 加速匹配代價計算,前端/后端優化高效。
- 靈活擴展:方法可適應不同傳感器速率、不同點云密度和環境類型。
五、參考文獻
- Koide, K., Yokozuka, M., Oishi, S., & Banno, A. (2022). Globally Consistent and Tightly Coupled 3D LiDAR Inertial Mapping. IEEE ICRA 2022. PDF
- Koide, K., Yokozuka, M., Oishi, S., & Banno, A. (2021). Globally Consistent 3D LiDAR Mapping with GPU-accelerated GICP Matching Cost Factors. IEEE Robotics and Automation Letters, 6(3), 5282–5289.
- Shan, T., Englot, B., Meyers, D., Wang, W., Ratti, C., & Rus, D. (2020). LIO-SAM: Tightly-coupled Lidar Inertial Odometry via Smoothing and Mapping. arXiv:2007.00258.
:DMA(直接存儲器訪問))



)

TLS介紹及握手過程詳解)
)






)




