近日,美國明尼蘇達大學研究團隊在《從人手到機械臂:遙操作中運動技能具身化研究》中,成功開發出基于??Kinova的7軸力控機械臂Gen3的智能控制系統。這項創新性技術通過人工智能算法,實現了人類手臂動作到機械臂運動的精準映射,為工業自動化、醫療康復等領域帶來新型解決方案。
一、技術核心:當人類手勢遇見機械臂智能
研究團隊創新性地采用GRU(門控循環單元)變分自編碼器(VAE)架構,構建了機械臂運動的"數字孿生"系統。該系統通過深度學習算法,將??Kinova輕型機械臂??復雜的7自由度關節運動轉化為可理解的數學模型。

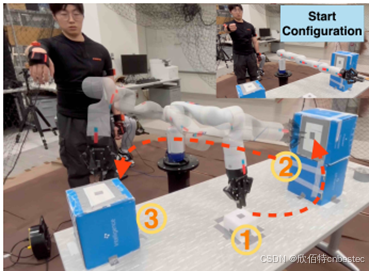
圖1 美國明尼蘇達大學實驗演示圖
?"傳統機械臂控制需要專業編程知識,"論文第一作者Haoyi Shi解釋,"而我們的系統就像教機械臂學習'手語',操作者只需自然移動手臂,??Kinova Gen3??就能實時響應。"
二、三大技術突破點
1. 直覺化生物力學和運動學映射 ??
研究團隊創新性地建立了人體12個主要關節與Kinova Gen3機械臂的智能映射關系。如圖1所示:
- ??肩部控制??:外展/內收動作映射至J1-J2關節(范圍-15°~120°)
- ??肘部同步??:屈伸動作對應J4關節(-120°~-60°)
- ??腕部耦合??:采用球鉸鏈模型,通過J5-J7關節復合實現人類手腕的旋前/旋后動作
2. 自適應生成式控制
通過GRU-VAE架構實現兩大創新:
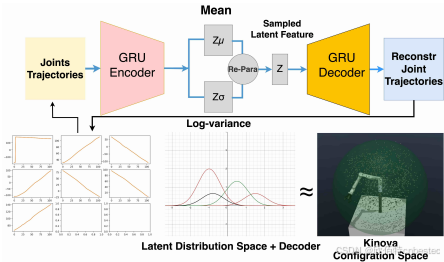
?圖2 ?GRU-VAE架構圖
?
- ??潛空間學習??:10維高斯分布表征7自由度運動(MAE損失函數+KL散度優化)
- ??實時生成??:40Hz采樣頻率下,系統響應延遲<25ms(實測值)
- ??數據增強??:僅需12組基礎動作即可生成15,043組訓練對(通過三次樣條插值)
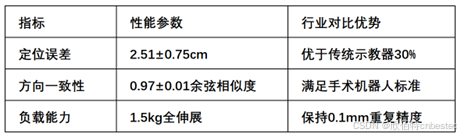
3. 工業級精度驗證
實驗數據表明:
 ?
?
- 直覺化操控??
系統建立了人體12個主要關節與??Kinova?7軸力控機械臂Gen3??的智能映射關系。如圖1所示,操作者的肩部旋轉可直接控制機械臂基座關節,而手腕動作則精準驅動末端執行器。 - ??自適應學習能力??
通過15043組訓練數據,GRU-VAE模型能生成訓練數據未包含的新動作組合。這意味著??Kinova Gen3??可適應復雜多變的實際工作場景。 - ??厘米級精度控制??
基于明尼蘇達大學的實驗室條件下,對四名操作者的測試結果顯示:未經專業訓練的操作者使用該系統時,末端定位誤差僅2.51±0.75cm,方向控制精度達97%。這種高精度特性使??Kinova輕型機械臂Gen3??適用于精密裝配等場景,如圖3。
 ?
?
圖3 ?Kinova Gen3場景應用?
?
三、行業應用前景廣闊
這項技術為??Kinova機械臂??開辟了多重應用可能:
- ??工業制造??:在危險環境(如核電站維護)中實現安全遠程操作
- ??醫療康復??:可用于醫療康復領域的輔助訓練場景
- ??教育培訓??:降低機器人編程學習門檻,培養智能制造人才
- ??科研探索??:為空間站等極端環境下的機器人操控提供新思路
"相比傳統6軸力控機械臂,??Kinova Gen3??的冗余自由度設計使其動作更接近人類手臂的靈活性,"研究團隊指出,"結合我們的控制系統,它能完成更復雜的曲線運動和非結構化環境適應。"
四、產品優勢與技術服務
作為本研究的硬件載體,Kinova 7軸力控機械臂Gen3憑借以下特性成為理想實驗平臺:
 ?
?
?圖4 ?Kinova 7軸力控機械臂Gen3產品圖
- 開放兼容性??:支持ROS、MATLAB和Python二次開發
- ?高集成度??:嵌入式控制器實現30分鐘快速部署
- 安全交互??:全關節扭矩傳感器確保人機協作安全
五、技術演進與市場展望
當前系統已實現40Hz的實時控制頻率,未來通過以下優化可進一步提升性能:
- 增加多操作者訓練數據提升泛化能力
- 融合關節速度信息使運動更流暢
- 擴展至雙手協同控制場景
??Kinova 7軸力控機械臂Gen3??憑借其6.2kg自重、89cm工作半徑等特性,配合該控制系統,有望成為柔性制造、智能實驗室等場景的核心設備。在未來,這類"所見即所得"的交互方式將有助于降低工業機器人使用門檻,加速中小企業自動化轉型。
【版權聲明】??
本文部分技術內容及數據援引自美國明尼蘇達大學研究團隊論文《From Human Hands to Robotic Limbs: A Study in Motor Skill Embodiment for Telemanipulation》(arXiv:2502.02036),相關知識產權歸原作者所有。如需轉載,請完整保留本聲明并注明原始出處。


— 第2章課后習題參考答案)

詳解)
)








)




