程序實現功能:
程序基于stm32芯片實現了控制LED燈亮滅、按鍵控制、串口通信、電機控制、溫濕度數據采集、超聲波測距、LCD顯示屏顯示內容這幾個功能,并用proteus8進行仿真。
1.電路圖 1、我設計的電路圖如下所示:
仿真原理圖如下 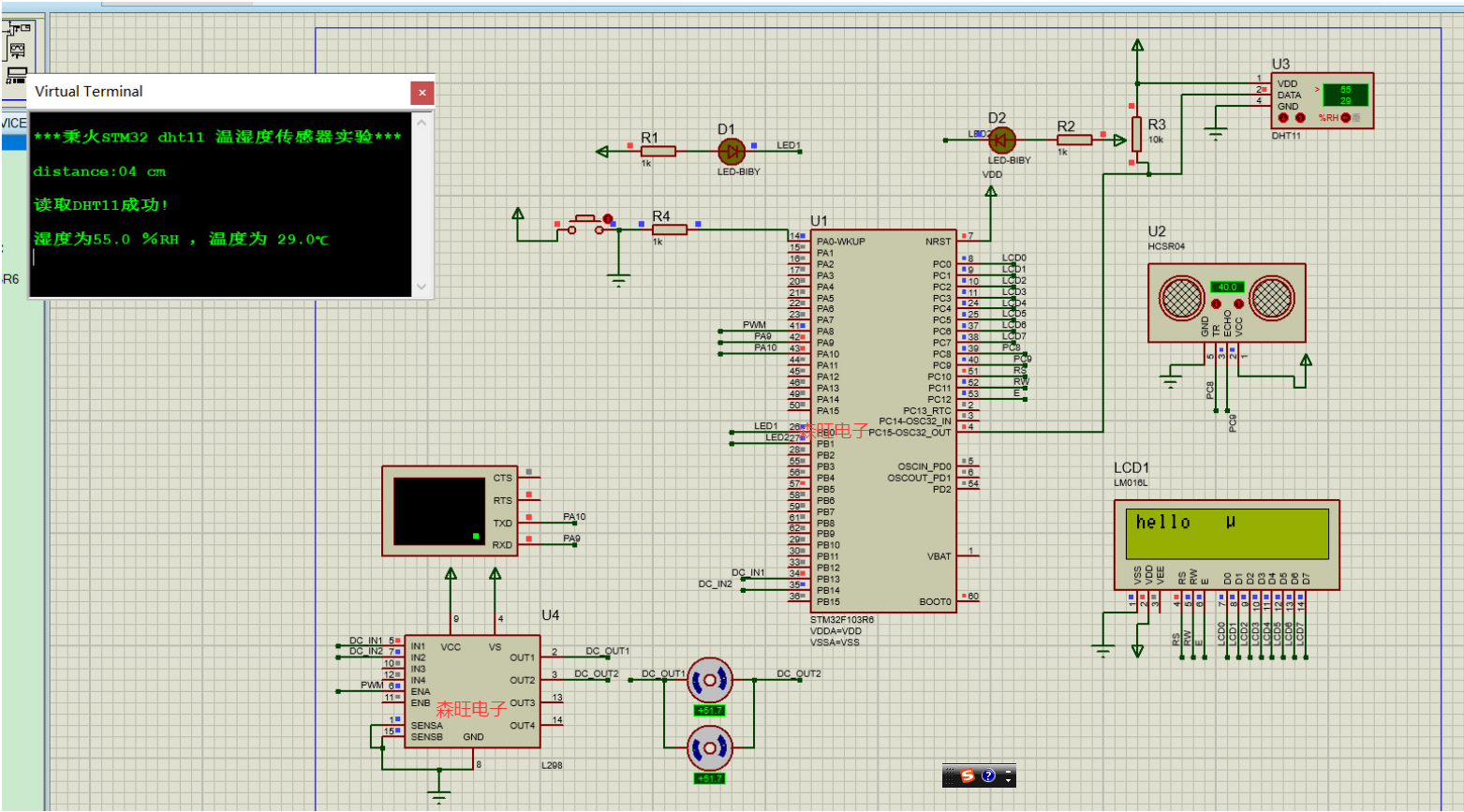
2.?程序功能介紹 程序總共包括控制LED燈亮滅、按鍵控制、串口通信、電機控制、溫濕度數據采集、超聲波測距、LCD顯示屏顯示內容這幾個功能,以下是這些功能的介紹: 2.1.?LED燈亮滅與按鍵控制 程序默認運行時,兩個LED燈會被點亮。當按下按鈕后,兩個LED燈會閃爍。
2.2.?串口通信 程序運行時,虛擬終端接串口通信用到的接收端和發送端,通過配置波特率、傳輸的奇偶校驗位、停止位、字長以及重定向,將printf函數打印的內容打印到虛擬終端上。 2.3.?電機的控制 通過L298芯片,改變功率,來控制電機的轉動。
2.4.?溫濕度數據采集 用DHT11溫濕度傳感器來采集溫濕度信息。 通過了解DHT11的工作時序,設計好對應的延時函數,進行數據采集,同時通過循環將每次采集的數據打印在虛擬終端上。 2.5.?超聲波測距 通過超聲波測距模塊來進行測距。 通過了解超聲波測距模塊的時序,利用定時器,采集測到的距離,并且通過循環打印在虛擬終端上。 2.6.?LCD液晶顯示器顯示數據 客戶端可以通過發送“database”字符串進入到數據庫的相關服務,在選擇相應功能執行。如下圖所示: 通過了解LM16016l中各引腳功能,相關控制指令以及寫時序和讀時序,在程序運行時,在顯示屏上打印“hello”。 3.具體代碼如下: * 文件名??: UltrasonicWave.c
* 描述? ? :超聲波測距模塊,UltrasonicWave_Configuration()函數
? ?? ?? ?? ? 初始化超聲模塊,UltrasonicWave_StartMeasure()函數
? ?? ?? ?? ?? ?? ?? ?? ? 啟動測距,并將測得的數據通過串口1打印出來? ?? ?? ?
* 實驗平臺:野火STM32開發板
* 硬件連接:------------------
*? ?? ?? ? | PC8??- TRIG? ?? ?|
*? ?? ?? ? | PC9??- ECHO? ?? ?|
*? ?? ?? ???------------------
* 庫版本??:ST3.5.0 UltrasonicWave.H - #ifndef __UltrasonicWave_H
- #define? ?? ???__UltrasonicWave_H
- void UltrasonicWave_Configuration(void);? ?? ?? ?? ?? ?//對超聲波模塊初始化
- void UltrasonicWave_StartMeasure(void);? ?? ?? ?? ?? ? //開始測距,發送一個>10us的脈沖,然后測量返回的高電平時間
- #endif /* __UltrasonicWave_H */
復制代碼
UltrasonicWave.c
*********************************************************************************/
#include "./Wave/UltrasonicWave.h"
#include "./usart/bsp_usart.h"
#include "./Tim2/TIM2.h"
#define? ?? ???TRIG_PORT? ?? ?GPIOC? ?? ?? ?? ?? ? //TRIG? ?? ?
#define? ?? ???ECHO_PORT? ?? ?GPIOC? ?? ?? ?? ?? ? //ECHO
#define? ?? ???TRIG_PIN? ?? ? GPIO_Pin_8? ?//TRIG? ?? ?
#define? ?? ???ECHO_PIN? ?? ? GPIO_Pin_9? ?? ???//ECHO? ?
unsigned short int UltrasonicWave_Distance;? ?? ?//計算出的距離? ?
/*
* 函數名:DelayTime_us
* 描述??:1us延時函數
* 輸入??:Time? ?? ?? ???延時的時間 US
* 輸出??:無? ?? ???
*/
void DelayTime_us(int Time)? ?
{
? ?unsigned char i;
? ?for ( ; Time>0; Time--)
? ???for ( i = 0; i < 72; i++ );
}
/*
* 函數名:UltrasonicWave_Configuration
* 描述??:超聲波模塊的初始化
* 輸入??:無
* 輸出??:無? ?? ???
*/
void UltrasonicWave_Configuration(void)
{
??GPIO_InitTypeDef GPIO_InitStructure;? ?? ???
? ?? ?? ?? ?? ???
??RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
? ?
??GPIO_InitStructure.GPIO_Pin = TRIG_PIN;? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ???//PC8接TRIG
??GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;? ?? ?? ?? ?? ?? ?? ?//設為推挽輸出模式
??GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;? ?? ?? ?? ?? ???
??GPIO_Init(TRIG_PORT, &GPIO_InitStructure);? ?? ?? ?? ?? ?? ?? ?? ? //初始化外設GPIO
??GPIO_InitStructure.GPIO_Pin = ECHO_PIN;? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ? //PC9接ECH0
??GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;? ?? ?? ?? ?? ???//設為輸入
??GPIO_Init(ECHO_PORT,&GPIO_InitStructure);? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ? //初始化GPIOA
}
/*
* 函數名:UltrasonicWave_CalculateTime
* 描述??:計算距離
* 輸入??:無
* 輸出??:無? ?? ???
*/
void UltrasonicWave_CalculateTime(void)
{
? ?UltrasonicWave_Distance=TIM_GetCounter(TIM2)*5*34/2000;
}
/*
* 函數名:UltrasonicWave_StartMeasure
* 描述??:開始測距,發送一個>10us的脈沖,然后測量返回的高電平時間
* 輸入??:無
* 輸出??:無? ?? ???
*/
void UltrasonicWave_StartMeasure(void)
{
??GPIO_SetBits(TRIG_PORT,TRIG_PIN);? ?? ?? ?? ?? ?? ? //送>10US的高電平
??DelayTime_us(20);? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ???//延時20US
??GPIO_ResetBits(TRIG_PORT,TRIG_PIN);
??
??while(!GPIO_ReadInputDataBit(ECHO_PORT,ECHO_PIN));? ?? ?? ?? ?? ?? ?? ?//等待高電平
??TIM_Cmd(TIM2, ENABLE);? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?//開啟時鐘
??while(GPIO_ReadInputDataBit(ECHO_PORT,ECHO_PIN));? ?? ?? ?? ?? ?? ?? ?? ? //等待低電平
??TIM_Cmd(TIM2, DISABLE);? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?//定時器2失能
??UltrasonicWave_CalculateTime();? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ?? ? //計算距離
??TIM_SetCounter(TIM2,0);
? ?? ???printf("\r\ndistance:%d%d cm\r\n",UltrasonicWave_Distance/256,UltrasonicWave_Distance%256);? ?? ???
? ?? ?? ?? ?
} ? | 






)
驅動學習筆記)






)



