?接線為 串口2 接入ESP8266
esp8266.c
#include "stm32f10x.h"//8266預處理文件
#include "esp8266.h"//硬件驅動
#include "delay.h"
#include "usart.h"//用得到的庫
#include <string.h>
#include <stdio.h>
#include <cJSON.h>
#include <stdlib.h>
#include <ctype.h> // for isspace
#include <string.h> // for strlen
#include <stddef.h>
#include <stdarg.h>char city_name[32]="beijing"; //用于存儲你要獲取的城市名字(拼音或地址碼)
char wifi_ssid[32]="0000"; //用于存儲你要連接的熱點名字
char wifi_pass[32]="0000"; //用于存儲你要連接的熱點密碼
int is_wifi_connected;//聯網標志位
const char *blacklist[] = {
//過濾顯示設置"Host:","Date:","Connection:","Content-Type:","access-control-allow-origin:","Content-Length:","etag:","x-powered-by:","x-ratelimit-limit:","x-ratelimit-remaining:","x-ratelimit-reset:","x-request-id:","x-tenant-id:",NULL // 結束標志
};
//用于在雜亂的數據中找到關鍵詞
const char *ExtractField(const char *buf, const char *key, char *out, size_t out_size);
//用于屏蔽關鍵詞輸出
void Filtered_Usart_Printf(const char *line);//======================
// 初始化ESP8266
//======================
void ESP8266_Init(void)
{is_wifi_connected=0;//初始化聯網標志位Usart_Printf(USART1, "Send AT\r\n"); //輸出到串口一// 查詢AT指令有效度ESP8266_SendCmd("AT\r\n","OK");Usart_Printf(USART1, "Send AT+CWJAP?\r\n");// 查詢是否已經連上網絡if(ESP8266_SendCmd("AT+CWJAP?\r\n",wifi_ssid)) {is_wifi_connected=1;} else {if(ConnectToWiFi()) {is_wifi_connected=1;//表示已經連上網絡} else {Usart_Printf(USART_DEBUG, "No Connect WiFi\r\n");}}}//判斷聯網是否成功
_Bool ConnectToWiFi(void)
{char cmd[64];Usart_Printf(USART1, "Send AT\r\n");// 啟動8266 客戶端模式 嘗試聯網ESP8266_SendCmd("AT\r\n","OK");Usart_Printf(USART1, "Send AT+CWMODE=1\r\n");//嘗試連接到網絡ESP8266_SendCmd("AT+CWMODE=1\r\n","OK");if(sizeof(wifi_ssid)!=0 &&sizeof(wifi_pass)!=0) {//網絡信息沒設置不執行聯網程序sprintf(cmd, "AT+CWJAP=\"%s\",\"%s\"\r\n", wifi_ssid, wifi_pass);Usart_Printf(USART_DEBUG, "Try to connect WiFi: %s pass:%s\r\n", wifi_ssid,wifi_pass);ESP8266_SendCmd(cmd,"CONNECTED");Usart_Printf(USART_DEBUG, "connected %s\r\n", wifi_ssid);return 1;//不設置邏輯運行成功即返回1表聯網成功}}//=================================
// cmd:命令 res:需要檢查的返回指令
// 傳遞字符串從串口2打印
//=================================
int ESP8266_SendCmd( char *cmd,char *res)
{Usart_Printf(USART2, cmd);char uart_buf[128];//數據緩存機制while(1) {if (USART2_GetLine(uart_buf, sizeof(uart_buf)) > 0) {// 緩沖數據中查找對應的關鍵詞if (strstr(uart_buf, res) != NULL) {// 判斷成功才打印(節約資源),收到的內容到串口1Usart_Printf(USART_DEBUG, "Recv: ");Usart_Printf(USART_DEBUG, uart_buf);Usart_Printf(USART_DEBUG, "\r\n");break;}if (strstr(uart_buf, "ERROR") != NULL) {// 判斷成功才打印(節約資源),收到的內容到串口1Usart_Printf(USART_DEBUG, "ERROR Recv: ");Usart_Printf(USART_DEBUG, uart_buf);Usart_Printf(USART_DEBUG, "\r\n");}}delay(500);}return 1;//返回1表執行成功
}//=================================
//發送給服務端以獲取數據的 GET/POST
//=================================
void GetWeatherAPI(void)
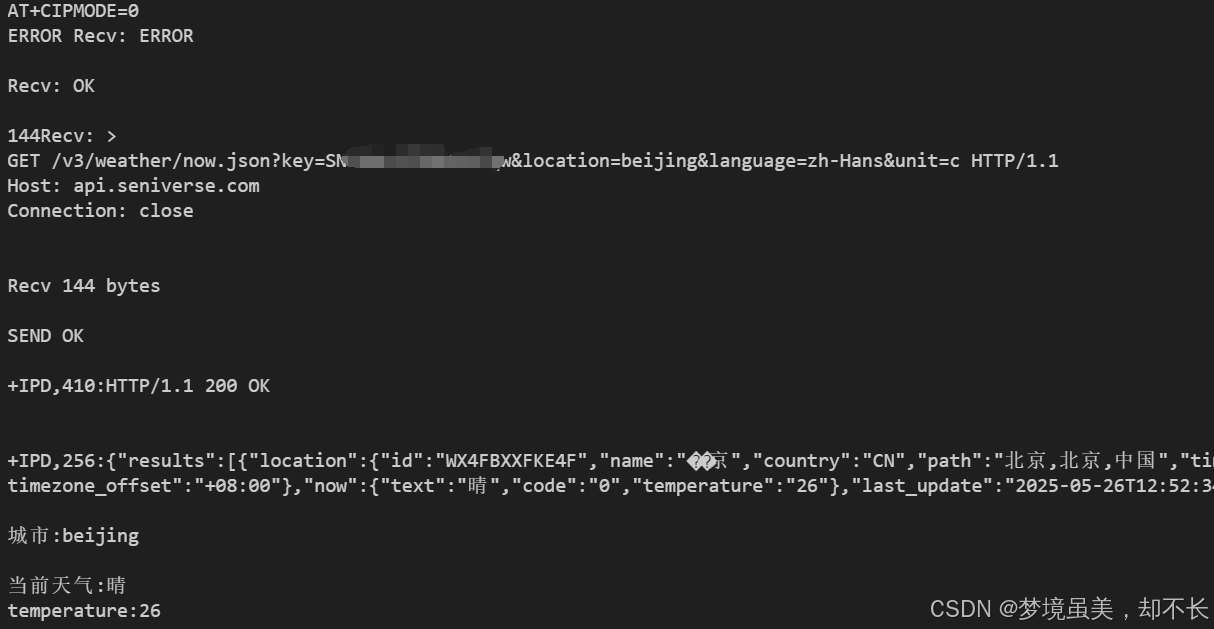
{Usart_Printf(USART_DEBUG, "AT+CIPMUX=0\r\n");ESP8266_SendCmd("AT+CIPMUX=0\r\n", "OK"); // 單連接模式Usart_Printf(USART_DEBUG, "AT+CIPSTART=\"TCP\",\"api.seniverse.com\",80\r\n");ESP8266_SendCmd("AT+CIPSTART=\"TCP\",\"api.seniverse.com\",80\r\n", "CONNECT");Usart_Printf(USART_DEBUG, "AT+CIPMODE=0\r\n"); // 確保是非透傳模式ESP8266_SendCmd("AT+CIPMODE=0\r\n", "OK");httpget();}void httpget(void)
{// 計算 GET 請求長度(根據你構造的 redata)char redata[256];char key[] = "心知天氣密匙";sprintf(redata,"GET /v3/weather/now.json?key=%s&location=%s&language=zh-Hans&unit=c HTTP/1.1\r\n""Host: api.seniverse.com\r\n""Connection: close\r\n""\r\n",key, city_name);char cmd[64];sprintf(cmd, "AT+CIPSEND=%d\r\n", strlen(redata)); // 指定長度Usart_Printf(USART_DEBUG, "%d", strlen(redata));ESP8266_SendCmd(cmd, ">"); // 等待 > 提示符// 發送實際內容Usart_Printf(USART_DEBUG, "%s", redata);Usart_Printf(USART2,redata); // 直接發送原始數據,不帶 \r\n 請求體內部已經定義好了char uart_buf[256];//數據緩存機制char temperature_str[16];char text_str[16];while(1) {if (USART2_GetLine(uart_buf, sizeof(uart_buf)) > 0) {Filtered_Usart_Printf(uart_buf);if (ExtractField(uart_buf, "text", text_str, sizeof(text_str)))
{Usart_Printf(USART_DEBUG,"\r\n城市:%s\r\n",city_name);Usart_Printf(USART_DEBUG,"\r\n當前天氣:%s\r\n",text_str);
} if (ExtractField(uart_buf, "temperature", temperature_str, sizeof(temperature_str))) {int temperature = atoi(temperature_str);Usart_Printf(USART_DEBUG,"temperature:%d\r\n",temperature);}}Usart_Printf(USART2,"AT+CIPCLOSE\r\n");//關閉服務器
}const char *ExtractField(const char *buf, const char *key, char *out, size_t out_size)
{char search_key[64];snprintf(search_key, sizeof(search_key), "\"%s\":\"", key);const char *start = strstr(buf, search_key);if (!start) return NULL;start += strlen(search_key);const char *end = strchr(start, '"');if (!end) return NULL;size_t len = end - start;if (len >= out_size) len = out_size - 1;strncpy(out, start, len);out[len] = '\0';return out;
}
//屏蔽輸出函數
void Filtered_Usart_Printf(const char *line) {for (int i = 0; blacklist[i] != NULL; i++) {if (strstr(line, blacklist[i])) {return;}}Usart_Printf(USART_DEBUG, "%s", line);
}
esp8266.h
#ifndef __ESP8266_H
#define __ESP8266_H
#define USART_DEBUG USART1// 全局變量聲明(外部可見)extern int is_wifi_connected;void ESP8266_Init(void); //初始化操作
void httpget(void);
int ESP8266_SendCmd( char *cmd,char *res);
void GetWeatherAPI(void);
_Bool ConnectToWiFi(void); #endif?usart.c
#include "usart.h"
#include <stdarg.h>
#include <string.h>
#include <stdio.h>#include "stm32f10x_usart.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_rcc.h"
#include "misc.h"
#include "esp8266.h"uint16_t usart2_index = 0;
uint8_t usart2_rx_buffer[USART2_RX_BUFFER_SIZE];
volatile uint16_t usart2_rx_head = 0; // 寫指針
volatile uint16_t usart2_rx_tail = 0; // 讀指針uint8_t usart1_buf[USART1_BUF_SIZE];
uint8_t usart2_buf[USART2_BUF_SIZE];
// 串口1接收緩沖及狀態
u8 USART1_RX_BUF[USART1_REC_LEN];
u16 USART1_RX_STA = 0;// 串口2接收緩沖及狀態
u8 USART2_RX_BUF[USART2_REC_LEN];
u16 USART2_RX_STA = 0;
void USART1_Init(u32 bound) {GPIO_InitTypeDef GPIO_InitStruct;USART_InitTypeDef USART_InitStruct;NVIC_InitTypeDef NVIC_InitStruct;RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);// PA9 - TXDGPIO_InitStruct.GPIO_Pin = GPIO_Pin_9;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);// PA10 - RXDGPIO_InitStruct.GPIO_Pin = GPIO_Pin_10;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA, &GPIO_InitStruct);// 配置串口1USART_InitStruct.USART_BaudRate = bound;USART_InitStruct.USART_WordLength = USART_WordLength_8b;USART_InitStruct.USART_StopBits = USART_StopBits_1;USART_InitStruct.USART_Parity = USART_Parity_No;USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_Init(USART1, &USART_InitStruct);// 中斷配置USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);USART_Cmd(USART1, ENABLE);// NVIC配置NVIC_InitStruct.NVIC_IRQChannel = USART1_IRQn;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 3;NVIC_InitStruct.NVIC_IRQChannelSubPriority = 3;NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStruct);
}
void USART2_Init(u32 bound) {GPIO_InitTypeDef GPIO_InitStruct;USART_InitTypeDef USART_InitStruct;NVIC_InitTypeDef NVIC_InitStruct;// 使能時鐘RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); // PA2/PA3RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2, ENABLE);// PA2 - TXDGPIO_InitStruct.GPIO_Pin = GPIO_Pin_2;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStruct);// PA3 - RXDGPIO_InitStruct.GPIO_Pin = GPIO_Pin_3;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOA, &GPIO_InitStruct);// 配置串口2USART_InitStruct.USART_BaudRate = bound;USART_InitStruct.USART_WordLength = USART_WordLength_8b;USART_InitStruct.USART_StopBits = USART_StopBits_1;USART_InitStruct.USART_Parity = USART_Parity_No;USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_Init(USART2, &USART_InitStruct);// 中斷配置USART_ITConfig(USART2, USART_IT_RXNE, ENABLE);USART_Cmd(USART2, ENABLE);// NVIC中斷配置NVIC_InitStruct.NVIC_IRQChannel = USART2_IRQn;NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 3;NVIC_InitStruct.NVIC_IRQChannelSubPriority = 3;NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStruct);
}
void Usart_SendString(USART_TypeDef *USARTx, const char *str) {while (*str) {USART_SendData(USARTx, (uint8_t)*str++);while (USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET);}
}void Usart_Printf(USART_TypeDef *USARTx, const char *fmt, ...) {while (USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET);//等待空閑char buffer[256];va_list ap;va_start(ap, fmt);vsnprintf(buffer, sizeof(buffer), fmt, ap);va_end(ap);Usart_SendString(USARTx, buffer);
}
void USART1_IRQHandler(void) {if (USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) {uint8_t ch = USART_ReceiveData(USART1);if ((USART1_RX_STA & 0x8000) == 0) {if ((USART1_RX_STA & 0x4000) != 0) {if (ch == '\n') {USART1_RX_STA |= 0x8000; // 完整幀接收完成} else {USART1_RX_STA = 0; // 出錯重置}} else {if (ch == '\r') {USART1_RX_STA |= 0x4000;} else {USART1_RX_BUF[USART1_RX_STA++ & 0x7FFF] = ch;if (USART1_RX_STA >= USART1_REC_LEN)USART1_RX_STA = 0;}}}}
}
void USART2_IRQHandler(void) {if (USART_GetITStatus(USART2, USART_IT_RXNE) != RESET) {uint8_t data = USART_ReceiveData(USART2);uint16_t next_head = (usart2_rx_head + 1) % USART2_RX_BUFFER_SIZE;if (next_head != usart2_rx_tail) { // 如果沒有發生緩沖區滿的情況usart2_rx_buffer[usart2_rx_head] = data; // 存入數據usart2_rx_head = next_head; // 更新寫指針return;
} if (next_head == usart2_rx_tail) {// 緩沖區滿,允許覆蓋usart2_rx_tail = (usart2_rx_tail + 1) % USART2_RX_BUFFER_SIZE;}
usart2_rx_buffer[usart2_rx_head] = data;usart2_rx_head = next_head;} }
/*** @brief 從 USART2 的 Ring Buffer 中讀取一個字節* @param data: 用于保存讀取到的數據* @retval 1: 成功讀取, 0: 緩沖區為空*/int USART2_GetLine(char *buf, int max_len) {int i = 0;while (i < max_len - 1) {if (usart2_rx_tail == usart2_rx_head) {break; // 緩沖區為空}char ch = usart2_rx_buffer[usart2_rx_tail];usart2_rx_tail = (usart2_rx_tail + 1) % USART2_RX_BUFFER_SIZE;buf[i++] = ch;if (ch == '\n') { // 遇到換行符結束buf[i] = '\0';return i;}}buf[i] = '\0'; // 補上字符串結束符return i;
}int USART1_WaitRecive(void) {u32 timeout = 0xFFFFF;while ((USART1_RX_STA & 0x8000) == 0) {if (--timeout == 0) return -1;}memcpy(usart1_buf, USART1_RX_BUF, USART1_RX_STA & 0x7FFF);usart1_buf[USART1_RX_STA & 0x7FFF] = '\0';USART1_ClearRxBuffer();return 0;
}void USART1_ClearRxBuffer(void) {memset(USART1_RX_BUF, 0, USART1_REC_LEN);USART1_RX_STA = 0;
}int USART2_WaitRecive(char *res) {u32 timeout = 0xFFFFF;while ((USART2_RX_STA & 0x8000) == 0) {if (--timeout == 0) return -1;}memcpy(usart2_buf, USART2_RX_BUF, USART2_RX_STA & 0x7FFF);usart1_buf[USART2_RX_STA & 0x7FFF] = '\0';USART1_ClearRxBuffer();return 0;}void USART2_ClearRxBuffer(void) {memset(USART2_RX_BUF, 0, USART2_REC_LEN);USART2_RX_STA = 0;
}
#pragma import(__use_no_semihosting)struct __FILE { int handle; };
FILE __stdout;void _sys_exit(int x) { x = x; }
void _ttywrch(int ch) { ch = ch; }int __io_putchar(int ch) {USART_SendData(USART1, (uint8_t)ch);while (USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);return ch;
}int __io_getchar(FILE *f) {f = f;while (USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET);return USART_ReceiveData(USART1);
}
?usart.h?
?
#ifndef __USART_H__
#define __USART_H__#include "stm32f10x.h"// 接收緩沖大小#define USART1_REC_LEN 256
#define USART2_REC_LEN 256
// 主程序訪問接收數據用的緩沖區
#define USART1_BUF_SIZE 256
#define USART2_BUF_SIZE 256
#define USART2_RX_BUFFER_SIZE 2048
// 接收緩沖和狀態變量
extern u8 USART1_RX_BUF[USART1_REC_LEN];
extern u16 USART1_RX_STA;extern u8 USART2_RX_BUF[USART2_REC_LEN];
extern u16 USART2_RX_STA;// 數據緩沖(供主程序讀取)
extern u8 usart1_buf[USART1_BUF_SIZE];
extern u8 usart2_buf[USART2_BUF_SIZE];// 初始化函數
void USART1_Init(u32 bound);
void USART2_Init(u32 bound);// 發送函數
void Usart_SendString(USART_TypeDef *USARTx, const char *str);
void Usart_Printf(USART_TypeDef *USARTx, const char *fmt, ...);// 接收處理函數
int USART1_WaitRecive(void);
void USART1_ClearRxBuffer(void);
int USART2_GetLine(char *buf, int max_len);int USART2_WaitRecive(char *res);
void USART2_ClearRxBuffer(void);#endif // __USART_H__
main.c?
//頭文件
#include "stm32f10x.h"
#include "GPIOLIKE51.h"
#include "usart.h"
#include "esp8266.h"
int main(void)
{ USART1_Init(9600);USART2_Init(115200);Usart_Printf(USART1, "Connect WiFi\r\n");ESP8266_Init();if(is_wifi_connected==1){GetWeatherAPI(); //更新天氣}else{Usart_Printf(USART1,"No connect to");}
}調試信息展示?

)

















