在微創手術中,Kinova輕型機械臂通過其靈活的運動控制和高精度的操作能力,支持多視圖圖像采集和3D重建。這種技術通過機械臂搭載的光學系統實現精準的多角度掃描,為醫療團隊提供清晰且詳細的解剖結構模型。其核心在于結合先進的傳感器配置與重建算法,有效提升手術導航的準確性。通過此類創新,醫生能夠更好地規劃手術路徑,同時減少對患者組織的損傷,從而加速術后恢復過程。
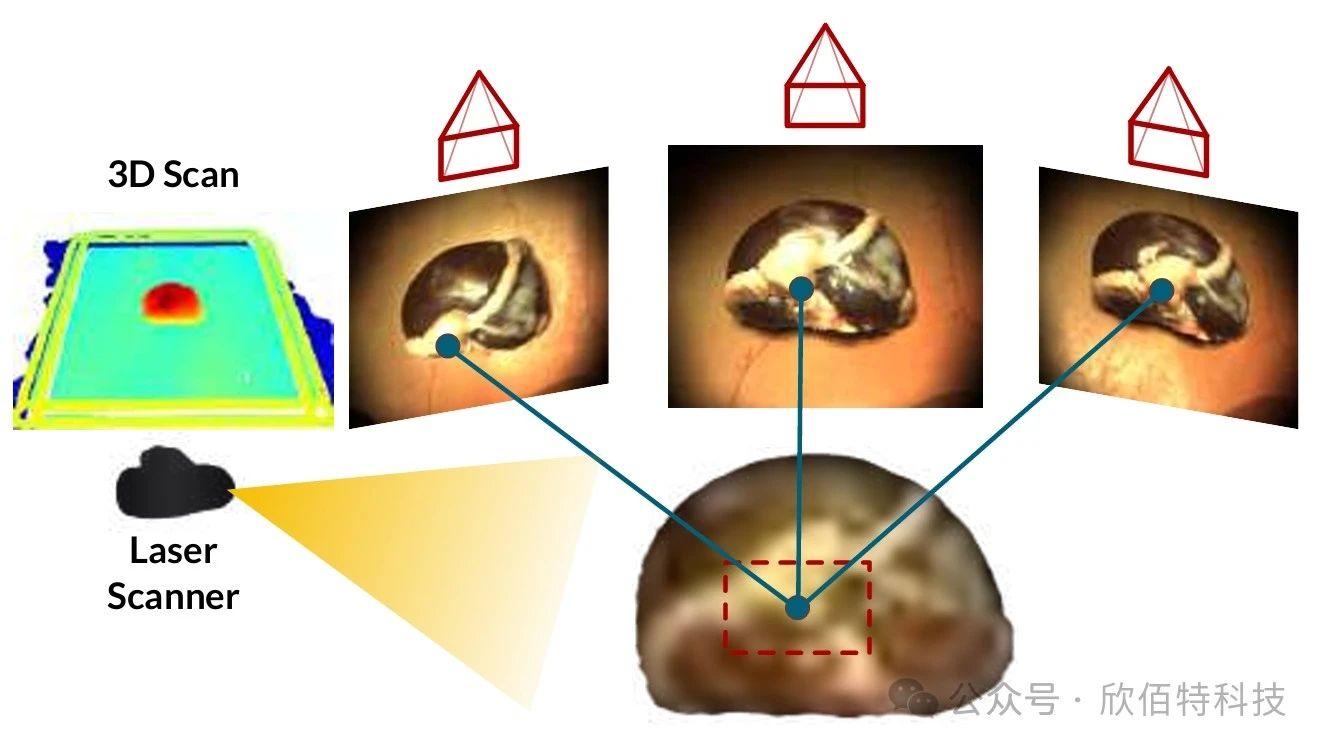
圖1. 本研究利用機械臂平臺采集的多視圖圖像進行三維重建。使用激光掃描儀獲取用于對比的真實數據。
Kinova輕型機械臂技術特點:

高精度控制系統:Kinova輕型機械臂能精準定位,在復雜手術環境中保障安全性,降低對周圍組織的損傷風險,同時支持實時反饋,快速響應環境變化,為醫生提供穩定操作體驗。
模塊化設計:Kinova輕型機械臂采用模塊化設計,可根據需求定制或更換模塊,適應不同醫療場景,如在微創手術中搭載不同傳感器或工具。該設計便于維護和升級,降低長期使用成本,使其成為醫療領域的多功能選擇。
Gen3系列醫療適配性:Gen3系列具有7自由度,運動范圍大,能覆蓋手術區域多角度。支持多種通信協議,易與其他醫療設備集成。輕量化、緊湊設計便于在狹小手術空間操作,結合先進3D重建技術,為醫生提供清晰解剖視圖,提高手術精確性和效率。

多視圖圖像采集:為確保數據質量及3D重建精度,Kinova輕型機械臂常搭載高分辨率RGB攝像頭和光學系統,部分場景還會配置深度傳感器或激光掃描儀。這些傳感器一般安裝在機械臂末端執行器上,可靈活調整視角,采集完整解剖結構數據。
Kinova輕型機械臂的7自由度設計使其在復雜手術環境中靈活移動,實現多角度覆蓋。其運動規劃算法可實時計算機械臂路徑,提升有限空間內的運行效率。為實現精準控制,機械臂采用逆運動學算法,依目標位置和姿態算出各關節角度。控制系統還支持遠程中心運動(RCM)模式,對微創手術很重要,可確保機械臂經手術切口時穩定,減少對周圍組織的損傷。
3D重建技術的應用
圖像數據處理算法
在3D重建中,圖像數據處理很重要。系統可通過先進算法,從多視圖圖像里提取特征點并匹配。常用的有結構化運動(SfM)和同時定位與建圖(SLAM)算法,它們能分析圖像特征點,算出相機運動軌跡和場景三維結構。
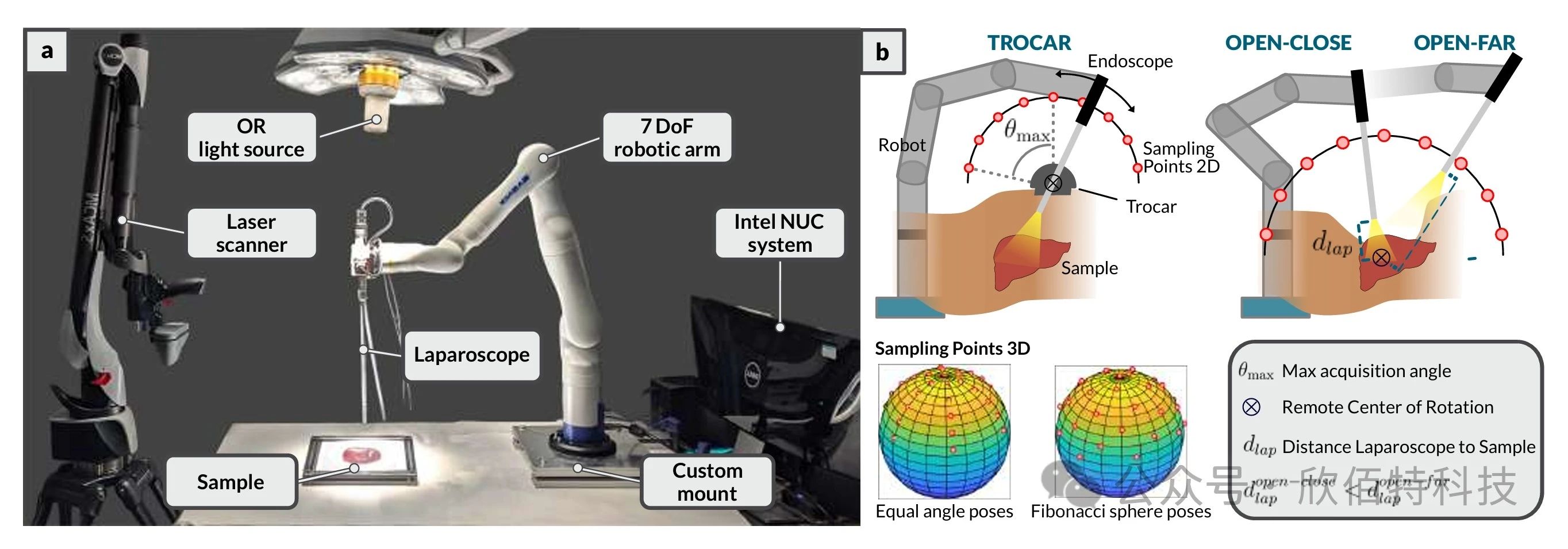
圖 2. a) 標注圖展示了機器人平臺。機器人通過定制支架固定在桌子上。腹腔鏡光學系統通過 3D 打印和激光切割部件連接到機器人上。所有軌跡控制和數據捕獲均由 Intel NUC 處理。
特征點提取是第一步,SIFT 和 ORB 算法能在不同光照下識別圖像關鍵點。之后,特征匹配算法對不同視角圖像配對,保障數據連貫。現在,基于深度學習的 ALIKED 和 LightGlue 等方法也被引入,通過學習圖像特征全局分布,提升匹配魯棒性。
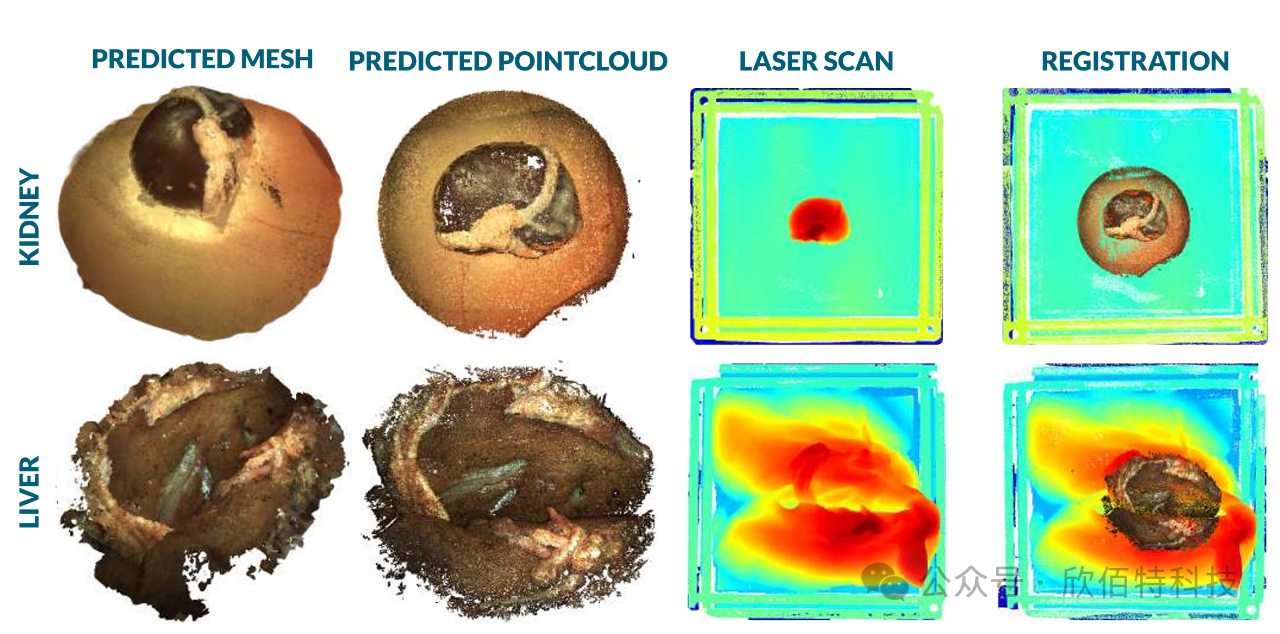
圖 4. 使用不同軌跡和照明條件獲得的腎臟和肝臟的 3D 重建。對于腎臟(第 1 行),在手術室照明下使用 Open-Far 軌跡捕獲數據,并使用 ALIKED-LG 圖像匹配器進行處理。肝臟(第 2 行)在腹腔鏡照明下使用穿刺器軌跡捕獲,并使用 GIM-LG 匹配器進行處理。在這兩種情況下,預測的 3D 模型(第 1 列和第 2 列)與真實激光掃描(第 3 列)以及后處理的對齊重建(第 4 列)進行了比較。
最后一步是點云生成,系統把匹配后的特征點投影到三維空間,生成稠密點云模型,為后續3D 重建提供基礎數據支持。選擇算法時,需結合手術場景復雜程度和計算資源限制,綜合考量算法精度和效率。
微創手術技術的發展離不開創新設備的支持。Kinova輕型機械臂通過其精準的多視圖圖像采集和3D重建能力,為微創手術提供了強大的技術保障。未來,機械臂可以結合實時數據處理技術,實現手術過程中的動態3D建模。這將幫助醫生在手術中實時調整操作策略,提升手術的成功率。此外,Kinova機械臂的模塊化設計可以支持更多類型的手術工具,為微創手術技術的多樣化發展提供可能性。通過不斷的技術突破,機械臂將在推動微創手術技術發展中發揮重要作用。
猜你喜歡
BOTA六維力矩傳感器如何打通機器人AI力控操作的三層架構?感知-決策-執行全鏈路揭秘
Hello Robot具身智能移動操作機器人Stretch 3:開源、靈巧、友好
Allegro Hand四指靈巧手全家桶:16自由度全驅下的靈巧性與觸覺智能融合
Touch Diver:Weart為XR和機器人遙操作專屬設計的觸覺反饋動捕手套
Aloha機器人與π0模型:通用性賦能下的零樣本學習與靈巧操作
Mentalab無線腦電系統,無線超輕便攜,干濕電極兼容,腦機接口~腦科學~認知心理學~睡眠健康等研究隨時隨地開展。


:nuttx)
)
)



)


)




)


